Однокомпонентный сферический датчик напряженности электрического поля с разомкнутой системой электродов в поле вблизи заземленной проводящей плоскости

Автор: С.В. Бирюков
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Физика приборостроения
Статья в выпуске: 4, 2025 года.
Бесплатный доступ
Работа направлена на исследование взаимодействия однокомпонентного сферического датчика напряженности электрического поля с разомкнутой системой чувствительных электродов с электрическим полем вблизи проводящей заземленной плоскости. Роль чувствительных электродов выполняют пустотелые сферические сегменты с угловым размером Θ0, диаметрально расположенные на виртуальной сфере радиуса R. Построена краткая теория взаимодействия датчика с полем вблизи проводящей плоскости. В основу теории легли основные уравнения, необходимые для построения математической модели датчика, позволяющие определять электрические заряды q1 и q2 на чувствительных электродах, напряжение холостого хода Uхх между чувствительными электродами и межэлектродную емкость С. Составлена математическая модель датчика и проведено математическое моделирование. В результате математического моделирования получены численные значения межэлектродной емкости C, дифференциального заряда Δq = q1 – q2 и напряжений холостого хода Uхх. Численные значения получены при изменении расстояния d от центра датчика до проводящей плоскости для различных угловых значений Θ0 сферических сегментов. Для удобства при расчетах использовалось не расстояние d, а относительный параметр α = R / d, характеризующий пространственный диапазон измерения. Пространственный диапазон измерения изменялся в пределах 0 < α ≤ 1 с шагом 0.1. Угловой размер сферических сегментов Θ0 изменялся от 30° до 90° с шагом в 15°. Исследования показали, что в качестве выходного сигнала датчика следует выбрать Uхх при угловых размерах сферических сегментов Θ0 ≤ 45°. Такой выбор обеспечит датчику погрешность, вызванную влиянием проводящей плоскости, не превышающую δ ≤ 4.77% во всем пространственном диапазоне измерения 0 < α ≤ 1. При уменьшении пространственного диапазона до α = 0.5 погрешность датчика не превысит δ ≤ 0.36%. Результаты исследования подтвердили возможность использования датчика вблизи проводящей заземленной плоскости.
Напряженность электрического поля, датчик с разомкнутой системой электродов, поле проводящей плоскости, взаимодействие поля с датчиком
Короткий адрес: https://sciup.org/142246265
IDR: 142246265 | УДК: 621.317.628
Single-component spherical electric field strength sensor with an open system of electrodes in the field of a conducting plane
This work aims to study the interaction of a single-component spherical electric field strength sensor with an open system of sensing electrodes and an electric field near a conductive grounded plane. The sensing electrodes are hollow spherical segments with an angular size of Θ0, diametrically located on a virtual sphere of radius R. A brief theory of the sensor's interaction with the field near the conducting plane is developed. The theory is based on the fundamental equations necessary for constructing a mathematical model of the sensor, allowing one to determine the electric charges q1 and q2 on the sensing electrodes, the open-circuit voltage Uxx between the sensing electrodes, and the interelectrode capacitance C. A mathematical model of the sensor was developed, and mathematical modeling was performed. As a result of mathematical modeling, numerical values of the interelectrode capacitance C, differential charge Δq = q1 – q2 and open-circuit voltage Uxx were obtained. The numerical values were obtained by varying the distance d from the sensor center to the conducting plane for different angular values Θ0 of the spherical segments. For convenience, the relative parameter α = R / d characterizing the spatial measurement range was used in the calculations instead of the distance d. The spatial measurement range varied within the limits 0 < α ≤ 1 with a step of 0.1. The angular size of the spherical segments Θ0 varied from 30° to 90° with a step of 15°. Research has shown that Uxx should be selected as the sensor output signal, with the angular sizes of the spherical segments Θ0≤45°. This choice will provide the sensor with an error caused by the influence of the conductive plane that does not exceed δ(α) ≤ 4.77% over the entire spatial measurement range of 0 < α ≤ 1. When the spatial range is reduced to α = 0.5, the sensor error will not exceed δ(α) ≤ 0.36%. The results of the study confirmed the possibility of using the sensor near a conductive grounded plane.
Текст научной статьи Однокомпонентный сферический датчик напряженности электрического поля с разомкнутой системой электродов в поле вблизи заземленной проводящей плоскости
Работы, направленные на исследования, создание и проектирование датчиков и средств измерений напряженности низкочастотного электрического поля (ЭП), всегда актуальны. Такие средства измерений используются для измерения и контроля ЭП промышленной частоты 50 Гц. Измерения проводятся на рабочих местах и территориях с установленным сверхвысоковольтным оборудованием. Целью инструментального контроля является гигиеническая оценка условий труда обслуживающего персонала.
Используемые на сегодняшний день средства измерений напряженности ЭП, содержащие сферические датчики напряженности ЭП электроин-дукционного типа с замкнутой системой чувствительных электродов (ЧЭ), хорошо представлены в работах [1–8]. Данная работа является следующей в цикле работ по исследованию нового типа электроиндукционных сферических датчиков, имеющих разомкнутую систему ЧЭ, представляющих собой полые сферические сегменты. Предыдущая работа автора посвящена исследованию поведения датчиков с разомкнутой системой электродов в однородном поле [9]. В данной работе будет рассмотрено поведение датчика ЭП в условиях присутствия проводящей заземленной плоскости. Подобная задача решалась в работе [10] для ЧЭ в форме сплошных сферических сегментов. В этой работе рассмотрен частный случай для сферических сегментов, представляющих сплошные полусферы.
ПОСТАНОВКА ЗАДАЧИ
Провести теоретические исследования поведения однокомпонентного сферического электроин-дукционного датчика напряженности ЭП с ра- зомкнутой системой проводящих электродов в электрическом поле с заземленной проводящей плоскостью. Для этого необходимо:
-
1) построить краткую теорию взаимодействия датчика, находящегося в ЭП с заземленной проводящей плоскостью;
-
2) построить математическую модель взаимодействия датчика с ЭП с заземленной проводящей плоскостью;
-
3) провести математическое моделирование, по результатам которого установить влияние заземленной проводящей плоскости на электрические параметры датчика, такие как электрический заряд, индуцированный на электродах датчика, напряжение холостого хода и электрическая емкость между электродами датчика;
-
4) оценить погрешность датчика по межэлектродной емкости, электрическому заряду и напряжению холостого хода;
-
5) сделать заключение по полученным результатам.
ТЕОРИЯ
Решения поставленных задач будет связано с рассмотрением поведения электроиндукционного сферического датчика напряженности ЭП с разомкнутой системой электродов при работе в поле вблизи заземленной плоскости. Для этого решим следующую задачу. Разместим находящиеся над проводящей заземленной плоскостью две проводящие сферические оболочки в форме сфериче- ских сегментов, лежащих на поверхности виртуальной сферы радиуса R. Сферические сегменты будут являться ЧЭ датчика. Обозначим поверхности первого и второго сферических сегментов через S1 и S2, их размеры зададим углом θ0 и текущее угловое значение углом θ. Примем расстояние от центра виртуальной сферы до плоскости равным d. Рассматриваемая в задаче ситуация представлена на рисунке.
Воспользуемся коллективными фундаментальными работами [11–14] и работами отдельных авторов [15–17] и выделим из них основные теоретические положения, необходимые для расчета датчиков с разомкнутой системой электродов, находящихся в поле заземленной плоскости. Обоснуем основные электрические параметры датчика, которые должны определять выделенные теоретические положения.
Для решения задачи зададим исходное положение сферического датчика в ЭП с проводящей плоскостью. Обозначим буквой d расстояние от центра датчика до проводящей плоскости, имеющей координату z = 0. При нахождении описанной системы ЧЭ в ЭП с заземленной плоскостью на их поверхностях S 1 и S 2 индуцируются противоположные по знаку электрические заряды – q 1 и + q 2 . Под действием ЭП электроды датчика 1 и 2 приобретут электрические потенциалы ϕ 01 и ϕ 02 , связанные с электрическими зарядами через межэлектродную емкость C , являющуюся емкостью C Д датчика. Электрические заряды и потенциалы электродов датчика пропорциональны напряженности ЭП.
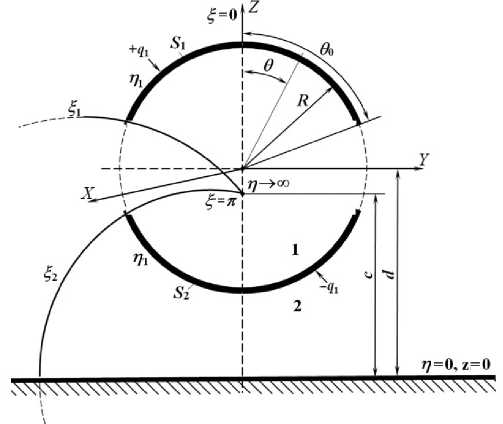
Рис. Система сферических электродов для исследования датчика в электрическом поле заземленной плоскости.
Основные характеристики: S 1 , S 2 — ЧЭ датчика, R — радиус виртуальной сферы, d — расстояние от датчика до заземленной плоскости, θ 0 — угловой размер ЧЭ
Следовательно, основными электрическими параметрами датчика будут являться электрические заряды q , потенциалы ϕ и емкость C Д . На их определение будут нацелены разрабатываемые теоретические положения.
Решим в нашей ситуации (см. рис.) краевую задачу для уравнения Лапласа. Для этого зададим граничные условия в виде
-
A ^ = 0; й|s 1 = й и; ^| s 2 = й й; й| z = 0 = 0, (1) где S 1 и S 2 — поверхности электродов 1 и 2 соответственно; ϕ 01 , ϕ 02 — заданные граничные условия. Решение будем проводить методом парных интегральных уравнений [9].
Для удобства решения задачи введем бисфери-ческую систему координат ( ξ , η , θ ) [18, гл. 2]–[20] (см. рис.). Из [1] — следующая связь бисфериче-ских координат с декартовыми координатами:
где с — расстояние от плоскости до первого фокуса бисферической системы координат, второй фокус находится под плоскостью на таком же расстоянии; n — изменяется от да до - да ; £ — в пределах 0 < £ < п ; 0 — изменяется в пределах 0 < 0 < 2 п (см. рис.); ch n и sh n — гиперболические косинус и синус.
Выполняя граничные условия (1) и воспользовавшись известным [12] выражением q = f °( S )d S, S
найдем электрические заряды на электродах 1 и 2. Для этого необходимо проинтегрировать поверх- ностную плотность зарядов дй °(S) = s~ dn
n =n 1
по поверхностям S1 и S2 электродов 1 и 2. Тогда получим:
c • sin £ • cos в ch n - cos £ c • sin £ • sin в ch n - cos £ c • sh n chn- cos£
t Ш\
£ 1 cos—sh—
q1 = 8nsd[f(t) —2---2- d t, ch n - cos t
\ 0 1 (4)
tη n sin — ch — q2 = -8nsd \ f (t)---2----— dt,
2 { 72 chn1 - cost где f1(t) и f2(t) — функции [12], получаемые из решения системы парных интегральных уравнений:
ξ 1
f l (в 0 ) --f f l ( в )
π 0
π
- -f f 2( в ) x π ξ 2
f в + в ^ u cos I — 2 J sh n 1 ch2 n 1 - cos( e + в 0 )
( в - в ^ u cos I —2 J sh n 1
ch2 n 1 - cos( e - в 0 )
. f в + в ] u ■ ( в - в ] u sin [ — 2 J sh n i sin I — J sh n 1
ch 2nt - cos( в + в 0 ) ch 2n - cos( в - в 0 )
π fв --f f2(в)
π
ξ 2
ξ 2
- -J f l ( в ) x
π 0
в - в u cos 0 sh η 1 -----2-------- +
π d в + — ff2в)
2 π
ξ 2
4 d в = - Ф ( π
f в + в ), cos I —2 J sh n 1
ch 2 n 1 - cos( в - в 0 ) ch 2 n 1 - cos( в + в 0 )
f в+в f в - в sm I —2 J sh n1 sm I —2 J sh n1
ch 2 n 1 - cos( t + x ) ch 2 n 1 - cos( t - x )
d θ
. „ 4
d в = - Ф 02 π
. в + в sin 0
-
3 θ
2ch n ! - cos ^0 - 3
2 a (ch n 1 - cos в 0 )
+ —
2 π
ξ 2
J f l ( в )
- в + в sin 0
3 θ
2ch n 1 - sin - 3
2 a (ch n 1 - cos в 0 )
,
■ в - в sin 0
;
-
- в - в sin 0
d в -
d в -
где a = R / d — относительное расстояние от центра датчика до заземленной плоскости; R — радиус сферического электрода; d — расстояние от центра датчика до заземленной плоскости; Ф 01 и Ф 02 — потенциальные функции ЧЭ 1 и 2 датчика в поле заземленной плоскости, определяемые из системы парных интегральных уравнения (5), (6).
Потенциальные функции Ф 01 и Ф 02 соответственно равны
Ф 01 = Ф 0О1 •
Ф 02 = Ф •
θη sin — • ch— ch n1 - cos t
θη sin — • ch — ch n1 - cos 90
= E 0 R
θη sin — • ch —
= E 0 R
ch n 1 - cos t ’
θη sin— • ch — ch n1 - cos90 ’
Целесообразность рассмотрения дифференциального электрического заряда, а не зарядов q 1 и q 2 в отдельности заключается в том, что в однородном поле q 1 = |— q 2| , а в неоднородном поле q 1 ^ I- q 2| , поэтому сложно оценить их измерения, вызванные неоднородностью поля.
Полученные автором выражения (3)–(11) при формировании краткой теории взаимодействия однокомпонентного сферического датчика напряженности ЭП, имеющего разомкнутую систему ЧЭ, с полем с проводящей плоскостью будут положены в основу математической модели датчика, используемой для дальнейших исследований.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
И ЕГО РЕЗУЛЬТАТЫ
где Ф 0 О 1 и Ф 0 O 2 — потенциальные функции ЧЭ 1 и 2 датчика в однородном ЭП, определяемые из системы парных интегральных уравнений, полученных для однородного поля. В обозначении потенциальных функций "О" означает потенциальные функции в однородном поле; a = R / d — пространственный диапазон измерений; R — радиус датчика; d — расстояние до источника поля.
Решение системы парных интегральных уравнений (5), (6) способствует нахождению функций f 1 ( θ 0 ) и f 2 ( θ 0 ), по которым определяются электрические заряды (4), индуцированные полем на поверхностях ЧЭ датчика, и электрическая емкость, создаваемая ЧЭ [11]
θ 0
r1 0
C = nR 1 - 2 J f (9 )sm-d 9 .
Электрические потенциалы ϕ 0 Н 1 и ϕ 0 Н 2 (Н в обозначении означает потенциал в неоднородном поле) ЧЭ 1 и 2 определятся через найденные по выражениям (4) электрические заряды q 1 и q 2 датчика и его емкость (8)
Н q 1 Н q 2
@ 01 C и @ 02 C
.
Найденные выражения (4) для электрических зарядов, индуцированных на ЧЭ датчика, и их потенциалов (9) позволяют определить:
– дифференциальный электрический заряд
a q = q i - q - , (10)
– разность потенциалов ЧЭ датчика, соответственно равную напряжению холостого хода
HH
U xx = @ 01 @ 02 -
Для проведения математического моделирования построена математическая модель, объединяющая выражения (3)–(11). Математическая модель позволяет задавать конструктивный размер θ 0 ЧЭ датчика и пространственное расстояние d от центра датчика до заземленной плоскости. Пространственное расстояние задавалось через относительное расстояние (пространственный диапазон измерения) a = R / d .
Задавая различные значения угловых размеров ЧЭ θ 0 и относительного расстояния a , при математическом моделировании:
– определялись электрические параметры датчика, такие как межэлектродная емкость C , дифференциальный заряд ЧЭ A q и напряжение холостого хода U xx ;
– оценивались изменения указанных параметров, вызванные приближением датчика к заземленной плоскости.
Математическое моделирование проводилось для датчиков с ЧЭ в форме полых сферических сегментов с изменением их угловых размеров 9 от 30 ° до 90 ° с шагом в 15 ° и в пространственном диапазоне a , изменяющимся в интервале 0 < a < 1 с шагом 0.1.
При моделировании были приняты следующие нормировки: A q * =A q/ ( ns 0 R2E 0 ) — для дифференциального заряда; U *x = U xx/ R • E о — для напряжений холостого хода; C* = С /( 4ns 0 R ) — для электрической емкости, где s = 8.85Л0-12 Ф/м — электрическая постоянная; E 0 — напряженность однородного ЭП при a → 0.
Результаты математического моделирования в виде численных значений искомых параметров представлены в таблице.
Табл. Расчетные значения электрических характеристик датчика при его работе в поле с заземленной плоскостью в зависимости от его конструктивных параметров и высоты над плоскостью
|
Угол ЧЭ 0 0 |
й й S Ь S ей X г; Г) |
Высота над плоскостью a = R / d |
||||||||||
|
~0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1.0 |
||
|
30 ° |
C* |
0.1961 |
0.1963 |
0.1965 |
0.1973 |
0.1981 |
0.2001 |
0.2042 |
0.2123 |
0.2240 |
0.2471 |
0.2971 |
|
X a ), % |
0 |
0.14 |
0.28 |
0.55 |
0.98 |
1.82 |
4.22 |
8.08 |
14.34 |
26.08 |
51.35 |
|
|
A q* |
1.433 |
1.435 |
1.438 |
1.442 |
1.449 |
1.461 |
1.497 |
1.555 |
1.649 |
1.828 |
2.222 |
|
|
γ ( a ), % |
0 |
0.16 |
0.32 |
0.61 |
1.08 |
1.98 |
4.48 |
8.51 |
15.10 |
27.59 |
54.89 |
|
|
U * xx |
1.8238 |
1.8242 |
1.8245 |
1.8249 |
1.8260 |
1.8270 |
1.8280 |
1.8311 |
1.8360 |
1.8460 |
1.8665 |
|
|
8( a ), % |
0 |
0.02 |
0.04 |
0.06 |
0.1 |
0.157 |
0.25 |
0.4 |
0.67 |
1.2 |
2.34 |
|
|
45 ° |
C* |
0.3201 |
0.3203 |
0.3210 |
0.3221 |
0.3242 |
0.3271 |
0.3333 |
0.3452 |
0.3613 |
0.3931 |
0.4353 |
|
X a ), % |
0 |
0.08 |
0.29 |
0.62 |
1.16 |
2.14 |
4.04 |
7.93 |
12.86 |
22.21 |
41.53 |
|
|
A q* |
2.052 |
2.055 |
2.059 |
2.067 |
2.080 |
2.104 |
2.148 |
2.238 |
2.358 |
2.589 |
2.920 |
|
|
γ ( a ), % |
0 |
0.12 |
0.35 |
0.73 |
1.36 |
2.52 |
4.69 |
9.08 |
14.90 |
26.17 |
48.28 |
|
|
u* xx |
1.6053 |
1.6059 |
1.6063 |
1.6072 |
1.6084 |
1.6112 |
1.615 |
1.6225 |
1.6341 |
1.6485 |
1.6769 |
|
|
0( a ), % |
0 |
0.04 |
0.06 |
0.11 |
0.2 |
0.36 |
0.63 |
1.07 |
1.81 |
3.24 |
4.77 |
|
|
60 ° |
C* |
0.4851 |
0.4852 |
0.4860 |
0.4880 |
0.4901 |
0.4951 |
0.5021 |
0.5120 |
0.5323 |
0.5781 |
0.6452 |
|
^ ( a ), % |
0 |
0.044 |
0.208 |
0.624 |
1.068 |
1.973 |
3.461 |
5.538 |
9.767 |
19.378 |
33.06 |
|
|
A q* |
2.582 |
2.585 |
2.591 |
2.602 |
2.618 |
2.649 |
2.699 |
2.768 |
2.905 |
3.221 |
3.729 |
|
|
γ ( a ), % |
0 |
0.1 |
0.32 |
0.78 |
1.37 |
2.58 |
4.51 |
7.21 |
12.54 |
24.8 |
44.41 |
|
|
U * xx |
1.3319 |
1.3322 |
1.3332 |
1.3340 |
1.3359 |
1.3396 |
1.3452 |
1.3533 |
1.3660 |
1.3920 |
1.4450 |
|
|
8( a ). % |
0 |
0.05 |
0.11 |
0.15 |
0.3 |
0.59 |
1.05 |
1.58 |
2.49 |
4.5 |
8.53 |
|
|
75 ° |
C* |
0.7201 |
0.7201 |
0.7211 |
0.7230 |
0.7252 |
0.7301 |
0.7341 |
0.7392 |
0.7561 |
0.8050 |
0.9021 |
|
X a ), % |
0 |
0 |
0.13 |
0.38 |
0.75 |
1.4 |
1.89 |
2.68 |
4.93 |
11.74 |
25.27 |
|
|
A q* |
2.894 |
2.897 |
2.906 |
2.917 |
2.937 |
2.969 |
3.004 |
3.066 |
3.209 |
3.545 |
4.118 |
|
|
γ ( a ). % |
0 |
0.13 |
0.43 |
0.82 |
1.48 |
2.62 |
3.83 |
5.97 |
10.91 |
22.52 |
42.31 |
|
|
xx. |
1.0052 |
1.0062 |
1.0080 |
1.0100 |
1.0131 |
1.0172 |
1.0239 |
1.0371 |
1.0622 |
1.1020 |
1.1423 |
|
|
0( a ), % |
0 |
0.12 |
0.3 |
0.43 |
0.73 |
1.2 |
1.9 |
3.2 |
5.7 |
9.65 |
13.6 |
|
|
90 ° |
C* |
1.558 |
1.559 |
1.560 |
1.561 |
1.562 |
1.565 |
1.570 |
1.580 |
1.597 |
1.616 |
1.637 |
|
X a ), % |
0 |
0.06 |
0.12 |
0.19 |
0.26 |
0.45 |
0.77 |
1.41 |
2.50 |
3.72 |
5.04 |
|
|
A q* |
3.003 |
3.012 |
3.02 |
3.034 |
3.053 |
3.086 |
3.148 |
3.295 |
3.564 |
4.348 |
6.477 |
|
|
γ ( a ), % |
0 |
0.29 |
0.58 |
1.03 |
1.65 |
2.76 |
4.82 |
7.83 |
13.07 |
22.75 |
43.81 |
|
|
U * xx |
0.482 |
0.483 |
0.484 |
0.486 |
0.488 |
0.493 |
0.498 |
0.511 |
0.528 |
0.567 |
0.651 |
|
|
8( a ), % |
0 |
0.21 |
0.42 |
0.83 |
1.45 |
2.28 |
3.3 |
6.02 |
9.54 |
17.64 |
35.06 |
|
По численным значениям таблицы были рассчи- Поскольку эти характеристики выступают здесь как таны изменения электрических характеристик C*, результаты измерений поля, то уместно трактовать Aq * и U*xx., вызванные влиянием проводящей плос- их изменения как погрешности измерений кости при приближении датчика к ее поверхности. β(а) = [x(a) – x(~0)] / x(~0) × 100%, где β(а) — погрешности электрических параметров x(): C(а), Aq*(а) и U*xx(а), соответственно обозначенные в таблице, как ^( a), у( a) и £ a).
Результаты расчетов занесены в ту же таблицу. Из данных таблицы следует, что емкость C *, дифференциальный электрический заряд A q и напряжение холостого хода U *xx увеличиваются по мере приближения к заземленной плоскости. Наибольшее увеличение наблюдается для емкости C * и дифференциального электрического заряда A q , наименьшее — для напряжения холостого хода U * xx . Это подтверждают и рассчитанные значения погрешности этих параметров.
Значительное увеличение
– емкости C * объясняется "открытостью" электродной системы датчика, на которую оказывают влияние проводящая заземленная плоскость и внешние тела;
- дифференциального электрического заряда A q объясняется, тем, что его погрешность Ya ) пропорциональна сумме погрешностей ^ ( a ) межэлектродной емкости и £ a ) напряжения холостого хода, т.е. / ( a ) ~ [ ^ ( a ) + ц ( a ) ] .
Незначительное увеличение напряжения холостого хода U * xx объясняется, тем, что его погрешность . £ a ) пропорциональна разности погрешностей Ya ) дифференциального электрического заряда и межэлектродной емкости ^ ( a ), т.е. £ ( а ) ~ [ / ( а ) — 0( a ) ] • Это еще раз подтверждает правильность выбора в ранней работе автора [9] в качестве выходного параметра напряжения холостого хода.
При выходном сигнале датчика в виде напряжения холостого хода и выборе углового размера ЧЭ датчика 0 0 < 45 ° погрешность датчика, вызванная влиянием проводящей плоскости, не превысит £ a ) < 4.77% в пространственном диапазоне 0 < a < 1, а в допустимом пространственном диапазоне 0 < a < 0.5 не превысит £ a ) < 0.36%.
Допустимый пространственный диапазон измерения исключает касание датчиком заземленных и токоведущих тел. В допустимом диапазоне a = = R / d < 0.5, т.е. расстояние между центром датчика и внешними телами не должно быть меньше d = 2 R , а просвет не должен быть меньше R .
Таким образом, результаты, полученные при математическом моделировании датчика с разомкнутой системой электродов, подтвердили возможность его использования вблизи заземленной плоскости.
ВЫВОДЫ И ЗАКЛЮЧЕНИЕ
Выводы по результатам исследований сводятся к следующему.
-
1) Построена краткая теория поведения однокомпонентного датчика напряженности ЭП с разомкнутой системой электродов в форме полых сферических сегментов вблизи проводящей заземленной плоскости.
-
2) Составлена математическая модель датчика, учитывающая конструктивные параметры ЧЭ датчика и параметры, задающие пространственное положение датчика относительно заземленной плоскости. В основу математической модели датчика легли основные уравнения краткой теории.
-
3) Проведено математическое моделирование датчика, позволившее получить численные значения межэлектродной емкости C *, дифференциального электрического заряда A q * и напряжений холостого хода U * xx в зависимости от пространственного диапазона измерения датчика a и угловых размеров его ЧЭ 00. При этом пространственный диапазон измерения изменялся в диапазоне 0 < a < 1 с шагом 0,1, а угловой размер сферических сегментов 00 — от 30 ° до 90 ° с шагом в 15 ° .
-
4) Установлено, что при приближении к проводящей плоскости наиболее сильно изменяются такие параметры датчика, как межэлектродная емкость C * и дифференциальный электрический заряд A q *, индуцированный на электродах датчика.
-
5) Установлено, что минимальную погрешность, вызванную приближением датчика к проводящей плоскости, обеспечивает напряжение холостого хода U * xx , принятое за выходной сигнал датчика.
-
6) Установлено, что напряжение холостого хода при угловом размера ЧЭ датчика 0 0 < 45 ° , обеспечит датчику погрешность, вызванную влиянием проводящей плоскости, не превышающую S( a ) < 4.77% во всем пространственном диапазоне измерения 0 < a < 1.
-
7) Показано, что при тех же угловых размерах ЧЭ датчика, но в допустимом пространственном диапазоне 0 < a < 0.5 погрешность датчика не превысит £ ( a ) < 0.36%.
-
8) Подтверждена возможность применения датчика вблизи проводящей заземленной плоскости.
Подытоживая результаты проведенных исследований, можно заключить, что получены новые сведения о поведении датчика напряженности ЭП с разомкнутой системой электродов, находящимся в однородном поле вблизи заземленной плоскости.
Список литературы Однокомпонентный сферический датчик напряженности электрического поля с разомкнутой системой электродов в поле вблизи заземленной проводящей плоскости
- 1. Бирюков С.В., Ложников В.Я. Цифровой измеритель напряженности электрического поля промышленной частоты // Приборы и техника эксперимента. 1981. № 1. С. 275. URL: https://elibrary.ru/item.asp?id=82928888
- 2. Сукманов В.И., Сафонов В.И., Ильин А.Н., Масленников М.Ю. Прибор для измерения напряженности электрического поля // Электрические станции. 1987. № 6. С. 69–71.
- 3. Прибор для измерения электрического поля 50 Гц "ИНЭП-50". Руководство по эксплуатации. URL:
- http://www.tecnoshans2006.ru/Documents/ACS/pass_INAP.DOC
- 4. Измеритель напряженности ЭП промышленной частоты "ГРАДАН" от компании "Электроэнергетика". URL: https://www.korabel.ru/news/comments/izmeritel_napryazhennosti_elektricheskogo_polya_promishlennoy_chastoti_gradan_ot_kompanii_elektroenergetika.html
- 5. Измеритель электромагнитных полей П3-60. URL: https://ciklon-pribor.ru/pdf/p3-60%20pasp.pdf
- 6. Тюкин А.В., Бирюков С.В. Сдвоенный электроиндукционный датчик // Приборы и методы измерений, контроля качества и диагностики в промышленности и на транспорте: Материалы VI всероссийской научно-технической конференции с международным участием, 11 апреля 2025. Омск, 2025. С. 72–77.
- 7. Chunguang S. et al. Research on the Three-Dimensional Power Frequency Electric Field Measurement System // Journal of Sensors. 2022. Vol. 2021. Id. 8859022. DOI: 10.1155/2021/8859022
- 8. Xiao D . et al. A Power-Frequency Electric Field Sensor for Portable Measurement // Sensors. 2018. Vol. 18, no. 4. Id. 1053. DOI: 10.3390/s18041053
- 9. Бирюков С.В. Основы взаимодействия однокомпонентного сферического датчика напряженности электрического поля, имеющего разомкнутую систему электродов, с однородным полем // Научное приборостроение. 2025. Т. 35, № 3. С. 45–55. URL:
- http://iairas.ru/mag/2025/abst3.php#abst4
- 10. Подосенов С.А., Сачков В.И., Соколов А.А. Измерение напряженности электрического поля измерительным преобразователем вблизи проводящей плоскости // Измерительная техника. 1988. № 2. С. 45–46.
- 11. Миролюбов Н.Н., Костенко М.В., Левинштейн М.Л, Тиходеев Н.Н. Методы расчета электростатических полей. М.: Высшая школа, 1963. 415 с.
- 12. Уфлянд Я.С. Метод парных уравнений в задачах математической физики. Л.: Наука, 1977. 217 с.
- 13. Тозони О.В. Метод вторичных источников в электротехнике. М.: Энергия, 1975. 296 с.
- 14. Иоссель Ю.Я., Кочанов Э.С., Струнский М.Г. Расчет электрической емкости. Л.: Энергоиздат, 1981. 288 с.
- 15. Виноградова Е.М., Егоров Н.В., Кримская К.А. Расчет электростатического поля системы сферических сегментов // Журнал технической физики. 2008. Т. 78, вып 8. С. 128–131. URL: https://journals.ioffe.ru/articles/9490
- 16. Разуненко В.А. Потенциал сферического сегмента внутри сферического слоя с круглым отверстием // Вестник ХНУ: Радиофизика и Электроника. 2008. № 834. С. 120–126.
- 17. Исаев Ю.Н. Метод расчета распределения зарядов сплошных пластин и пластин с отверстием в форме круга и форме сферических сегментов при наличии внешнего электростатического поля // Известия Томского политехнического университета. 2008. Т. 312, № 4. С. 70–75. URL: https://elibrary.ru/item.asp?id=11481557
- 18. Арфкен Г. Математические методы в физике / Пер. с англ. В.В. Чепкунова. М.: Атомиздат, 1970. 705 с.
- URL: https://vk.com/wall-49014451_7914
- 19. Moon P., Spenser D.E. Field Theory Handbook: Including Coordinate Systems, Differential Equations and Their Solutions, 2 ed. Springer-Verlag, 1988. 244 p.
- 20. Морзе П.М., Фешбах Х. Методы теоретической физики, т. 1. Пер. с англ., М., 1958. 923 с.
- URL: https://obuchalka.org/20191230117099/metoditeoreticheskoi-fiziki-tom-1-mors-f-m-feshbah-g1958.html
