Описание переходных поверхностей зубьев косозубых колес векторными функциями

Автор: Андросов С.П., Браилов И.Г.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Современные технологии в промышленности и строительстве
Статья в выпуске: 4-3 т.12, 2010 года.
Бесплатный доступ
В работе определены зависимости, выраженные параметрическими векторными функциями, описывающие боковые винтовые переходные поверхности зубьев цилиндрических косозубых колес.
Зубчатое колесо, профиль зуба, переходная поверхность зуба, векторная функция
Короткий адрес: https://sciup.org/148199425
IDR: 148199425 | УДК: 621.833
Description of gear tooth transition surfaces in helical gears by vector functions
In work the dependences expressed by parametric vector functions, describing side screw transition sur-faces of gear tooth in cylindrical helical gears are defined.
Текст научной статьи Описание переходных поверхностей зубьев косозубых колес векторными функциями
Задачи геометрии зубчатых колес и моделирования процесса формообразования зубьев при зубофрезеровании в объемном представлении требуют рассмотрения боковой поверхности зуба. Боковая поверхность зубьев зубчатых колес, как известно, состоит из двух частей: эвольвентной LA и переходной М 1 L (рис. 1). Сопряжение профилей происходит в точке L . В статье рассматривается переходная часть боковой поверхности зуба на основе ее описания векторными параметрическими функциями. Отметим, что анализируется частный случай, когда переходная поверхность зуба имеет в торцевом сечении профиль в виде дуги окружности. Такая переходная поверхность формируется при нарезании зубчатых колес с положительным смещением исходного контура зуборезного инструмента [1]. Переходная кривая M 1 L в виде дуги окружности в торцевом сечении зубчатого колеса в локальной системе координат X 1 O 1 Y 1 Z 1 описывается векторной функцией следующего вида:
г ок
Р а 0 sin Y
Р а 0 cos Y
где γ – угол поворота радиус-вектора r ок , модуль которого равен значению радиуса ρ a0 .
В системе координат XOYZ вектор переходной кривой, восстановленный в точку M, определяется выражением r п.п.к
Ра 0 sin Y f + Ра0 cos Y
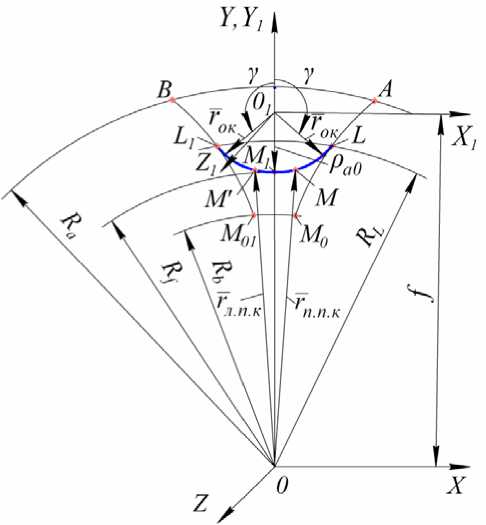
Рис. 1. Образование переходной кривой:
R b – радиус основной окружности; R f – радиус окружности впадин; R L – радиус окружности сопряжения частей профиля; Ra – радиус окружности вершин; ρ a0 – радиус скругления переходной кривой; О1 – центр скругления; f – координата центра скругления О 1 в системе координат XOYZ ; М 0 А и М 01 В – эвольвенты.
Формула (2) описывает переходную кривую М 1 L , соответствующую профилю зуба только с одной стороны. Второй переходный профиль М 1 L 1 образуется таким же образом, как и профиль М 1 L , только в данном случае угол γ имеет отрицательное значение. С учетом этого векторная функция левой, относительно оси OY , переходной кривой запишется:
r л..п.к
- Р а 0 sin Y f + Р а 0 cos Y 0
Положение произвольной точки М правой винтовой переходной поверхности М1М1'L'L (рис. 2) косого зуба определяется векторной функцией г......
ï . ï .. ï
f sin Ф 1 + p . O sin ( Y + Ф 1 ) f cos Ф 1 + p . о cos ( Y + Ф 1 )
- а ф 1
где φ 1 – угол поворота проекции вектора r п . п . п на плоскость XOY ; а – параметр, характеризующий движение по винтовой линии вдоль оси колеса OZ . Текущий параметрический угол φ 1 изменяется в пределах от своего нулевого значения, до значения φ 1max , которое он принимает на тыльном торцевом сечении зубчатого колеса. Величина φ 1max определяется по формуле
b
Ф 1тах = — tg P b Rb
,
где βb – угол наклона линии зуба на основном цилиндре; b – ширина зубчатого венца колеса. Соответственно положение произвольной точки М' левой переходной поверхности М1М1'L1L1 описывается векторной функцией f sin Ф1 - Ра о sin (Y - Ф1 )
Г л.п.п
f cos Ф 1 + Р а о cos ( Y - Ф 1 )
- а Ф 1 J (6)
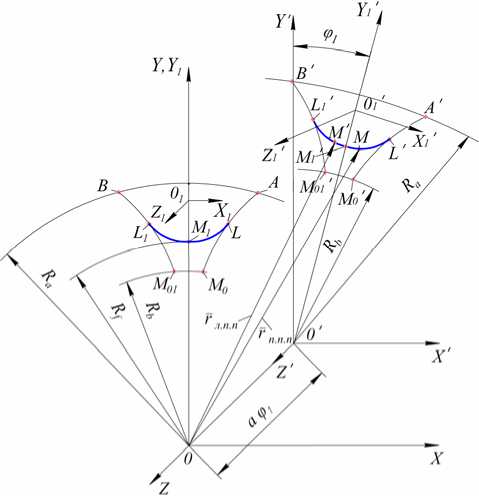
Рис. 2. Переходные поверхности
Формулы (4) и (6) описывают переходные поверхности, у которых во фронтальном торцевом сечении зубчатого колеса начальная точка М 1 профиля расположена на оси OY системы координат. При образовании формы зуба колеса боковые поверхности располагаются таким образом, что они охватывают его тело симметрично оси OY . С этой целью векторные функции (4) и (6) поворачиваются на угол ψ 2 (рис. 3). Причем векторная функция (4), описывающая правую переходную поверхность, поворачивается против часовой стрелки, а функция (6) – по часовой стрелке. Угол поворота ψ 2 определяется из схемы фронтального торцевого сечения зубчатого колеса, показанного на рис. 3. При его нахождении учитывается, что толщина зуба S t =M'M'' по делительной окружности радиуса R имеет заданное значение. При повороте профиля зуба из положения М 1 LMA в положение М 11 L 11 М''А 1 угол ψ 2 равняется сумме углов
¥ 2 = V + ¥1
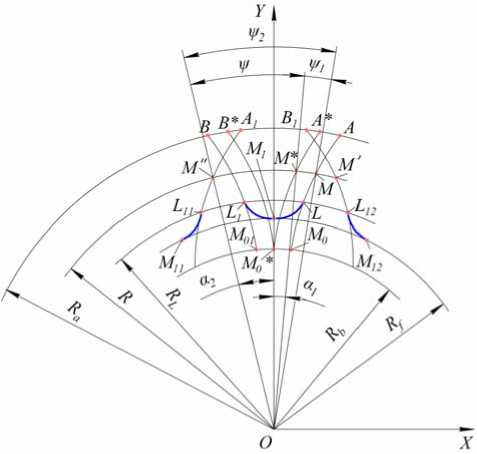
Рис. 3. Фронтальное торцевое сечение
В формуле (7) угол ψ находится как сумма углов
¥ = a 1 + a 2
где α1 – эвольвентный угол эвольвенты М0*А* в точке М*. Значение угла α2 вычисляется по формуле a 2
P t = mn n 4 R 4 R cos в
где P t - окружной шаг зубьев; m n - нормальный модуль зубьев; β – угол наклона зубьев по делительному цилиндру. Угол ψ 1 определяется из схемы формирования переходной кривой (рис. 4). Значение угла ψ 1 равняется разнице углов
Векторная функция г л . п . п . з левой боковой переходной поверхности зуба косозубого ко-леса M ii M ii' Ln'Ln (рис. 5) запишется:
г...... = 1/1 г......
е . i . i . q i . i . i
V 1 = a w - V l
где [M] – матрица поворота на угол ψ 2 против часовой стрелки:
где α w – угол зацепления; φ L* – угол развернутости эвольвенты М 0 А в точке L . Угол фL * определяется зависимостью [2]:
V l

^^^^™
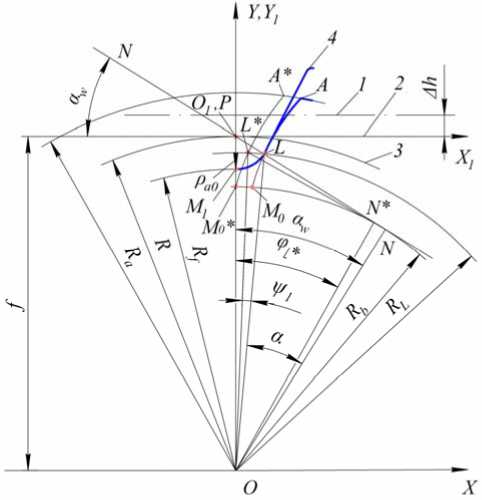
Рис. 4. Формирование переходной кривой:
1 – средняя линия исходного контура рейки 4; 2 – начальная прямая; 3 – начальная (делительная) окружность; NN - линия зацепления; Р - полюс зацепления; ^h - смещение исходного контура
Радиус R l цилиндра сопряжения переходной и эвольвентной поверхностей зуба колеса вычисляется по формуле
R
L
cos а
|
COS V 2 |
- sin v 2 |
0 " |
||
|
[ M ] = |
sin V 2 |
COS V 2 |
0 |
|
|
_ 0 |
0 |
1 . |
. (15) |
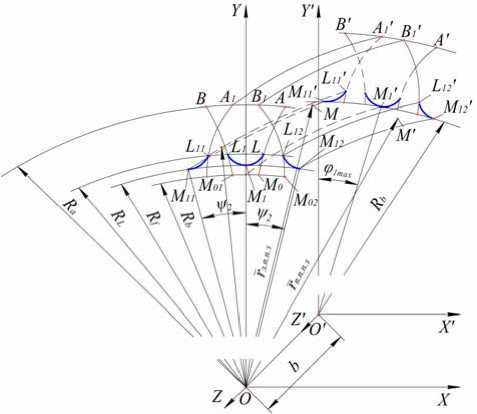
Рис. 5. Переходные поверхности зуба
После перемножения матрицы [M] и функции Г п . п . п векторная функция r , . п . п . з принимает вид:
r л.п.п.з
f Sin ( ф 1 - V 2 )+ Р а 0 Sin ( r + Ф 1 -Ф 2 ) f cos ( V 1 -V 2 )+ Р а 0 cos (Y + Ф 1 - Ф 2 )
- а Ф 1
Соответственно векторная функция правой боковой переходной поверхности зуба косозубого колеса M 12 M 12' L 12' L 12 запишется:
r.Hq = [ ^ 1 ] Г»Л
где а - угол профиля эвольвенты М 0 Л в точке сопряжения L :
LN а = arctg
Rb . (13)
Длина отрезка LN имеет значение LN = R b tga w - p aO .
где [M 1 ] – матрица поворота на угол ψ 2 по часовой стрелке:
[ M , ] =
|
cos v 2 |
sin v 2 |
0 " |
|
- sin v 2 |
cos v 2 |
0 |
|
0 |
0 |
1 . |
После преобразований векторная функ- ция rп.п.п.з принимает вид:
п . п . п . з
f sin (ф, + V 2 )- Ра о sin (J - фх - V2 ) f cos(^i + V 2 )+ Ра о cos(Y - Ф1 - V 2 )
- а ф 1
Формулы (16) и (19) описывают боковые винтовые переходные поверхности первого зуба колеса. Переходные поверхности второго и последующих зубьев колеса описываются векторными функциями, которые получаются путем умножения функций (16) и (19) на матрицу
[ M . ] =
cos V 3 sin v 3 0
- sinV3 cosV3 о
0 01
( i - 1 ) 2 n где V з =--------- .
z
В формуле (20) номер зуба i принимает значение от 1 до числа зубьев z.
Выводы: определены зависимости для описания боковых винтовых переходных поверхностей зубьев цилиндрического косозубого колеса, выраженные параметрическими векторными функциями, использование которых необходимо при моделировании формообразования в процессе зубообработки.
Список литературы Описание переходных поверхностей зубьев косозубых колес векторными функциями
- Болотовский, И.А. Цилиндрические эвольвентные зубчатые передачи внешнего зацепления/И.А. Болотовский, Б.И. Гурьев, В.Э. Смирнов, Б.И. Шендерей -М.: Машиностроение, 1974. 160 с.
- Браилов, И.Г. Боковая поверхность зуба цилиндрических зубчатых колес/И.Г. Браилов, С.П. Андросов, С.С. Адмаев//Известия Самарского научного центра РАН, Т. 12, 1(2), 2010. С. 310-312.
