Определение геометрических параметров совмещённых конических опор качения водила планетарно-цевочной передачи типа 2K-V

Автор: Киреев Сергей Олегович, Васильев Борис Николаевич, Падалко Александр Павлович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 6 (57) т.11, 2011 года.
Бесплатный доступ
Изложен метод определения геометрических параметров конических роликов при проектировании радиально упорных совмещённых конических опор качения водила в планетарной передаче типа 2K-V с внецентроидным внутренним цевочным зацеплением на второй ступени. Данные опоры используются при невозможности применения стандартных конических подшипников качения по причине ограничения габаритных размеров изделия.
Геометрические параметры, опоры качения водила передачи 2k-v
Короткий адрес: https://sciup.org/14250326
IDR: 14250326 | УДК: 621.833.6
Definition of geometrical parameters for combined cone rolling bearings of 2K-V-type planetary pin carrier
The method for determining the geometrical parameters of the cone rolls when designing the angular contact combined cone rolling bearings of 2K-V-type planetary pin carrier with the off-centroidal inner mangle gear at the second stage is stated. The bearings serve in case when no standard cone rolling bearings can be used due to the space restrictions.
Текст научной статьи Определение геометрических параметров совмещённых конических опор качения водила планетарно-цевочной передачи типа 2K-V
Введение. Планетарно-цевочные передачи, известные в отечественной технической литературе под условным обозначением 2K-V [1], благодаря компактности и возможности обеспечивать значительные передаточные отношения при сохранении высокой нагрузочной способности, кинематической точности, низкой виброактивности и высокому КПД, уже достаточно длительное время успешно применяются в качестве основных элементов силового привода звеньев промышленных роботов [2]. Данные механизмы, выполненные с тремя эксцентриковыми валами, традиционным эвольвентным зацеплением на первой быстроходной ступени и внецентроидным внутренним це- вочным зацеплением на второй тихоходной ступени, относятся к дифференциальным и могут применяться в машинах по различным вариантам сочетаний входных и выходных звеньев. При
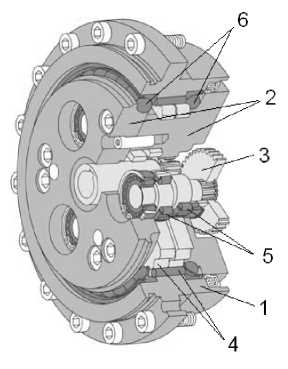
Рис. 1. Вариант трехваловой схемы планетарно-цевочного редуктора 2K-V фирмы «Nabtesco»: 1 – корпус; 2 – водило; 3 – эвольвентный сателлит быстроходной ступени; 4 – эпи-циклоидный сателлит и цевка вне-центроидного внутреннего цевочного зацепления; 5 – цилиндрические роликовые подшипники; 6 – шарики радиально-упорных совмещённых опор качения
этом передаточное отношение получаемых редукторов будет изменяться на единицу. Как правило, выходным звеном подобного типа планетарно-цевочных редукторов, является водило, закрепленное в подшипниках качения в корпусе редуктора. Необходимо отметить, что все силы, возникающие при передаче и преобразовании вращательного движения в зацеплении эвольвентной планетарной ступени и во внецентроидном внутреннем цевочном зацеплении второй ступени, за счет принятой трехваловой схемы передачи движения полностью уравновешиваются внутри корпуса и практически не оказывают силового воздействия на указанные подшипники качения. Однако силы инерции приводимых в движение водилом рабочих звеньев промышленных роботов, возникающие при их перемещении со значительными ускорениями, их вес и приложенные к ним рабочие нагрузки создают на водиле значительные опрокидывающие моменты и осевые усилия, непосредственно воздействующие на эти подшипники качения.
Геометрические параметры опор качения водила. На рис. 1 показан пример исполнения такого планетарно-цевочного редуктора, разработанный компанией «Nabtesco» (Германия), являющейся одной из ведущих в этом направлении зарубежных фирм.
Как видно из рисунка, рассматриваемые опоры качения выполнены в форме оригинальных радиально-упорных подшипников, внутренние кольца которых совмещены с корпусом водила, что представляет собой достаточно сложную в технологическом отношении конструкцию. Наружное кольцо выполнено отдельно и вставляется в корпус редуктора. В качестве тел качения в данных опорах качения используются шарики с точечным контактом (поз. 6). Применение подобной формы тел качения снижает динамическую и статическую грузоподъемность этих опор и ещё более усложняет технологию изготовления беговых дорожек, расположенных на корпусе водила. Увеличение динамической грузоподъемности в данном случае достигается за счет изъятия сепаратора и увеличения количества тел качения при более плотном их расположении в каждой опоре качения. Достаточно сложной представляется нам и регулировка рабочих зазоров, которая необходима для подобного типа узлов.
Переход в радиально-упорных подшипниковых узлах от точечного контакта тел качения к линейному дает возможность значительно увеличить их динамическую и статическую грузоподъемности. Это может быть достигнуто заменой в опорных узлах тел качения сферической формы на ролики, имеющие коническую форму [3]. Следует отметить, что применение в рассматриваемых опорных узлах стандартных радиально-упорных конических подшипников c необходимой грузоподъемностью, учитывая их значительные установочные размеры, может привести к увеличению общих габаритов редуктора и его массы, и в связи с этим является также нецелесообразным. Это особенно является актуальным при проектировании малогабаритных планетарно-цевочных редукторов с заранее заданными общими габаритными параметрами, определяемыми условиями их эксплуатации.
Проектированию и расчету опорных узлов водила должен предшествовать расчет всех элементов эвольвентной и цевочной передач и опорных узлов эксцентриковых валов. Выполняется также предварительная конструктивная проработка водила, всех входящих в него элементов и корпуса редуктора. Это все, в общем, дает возможность предварительно определить габаритные размеры опорных узлов водила и нагрузки, действующие на них с учетом внешних сил и моментов.
С учетом полученных значений радиальных и осевых нагрузок, действующих на совмещённые опоры качения водила, осуществляется подбор диаметральных и линейных параметров конических роликов с ориентацией на конические ролики, применяемые в стандартных радиально-упорных подшипниках. В зависимости от соотношения радиальных и осевых нагрузок ориентировочно выбирается угол контакта конического ролика в пределах 9–18° и угол конусности ролика, но так, чтобы вершина конуса ролика лежала на оси вращения водила. На рис. 2 показан один из вариантов компоновки таких подшипниковых опор (поз. 3) водила планетарно-цевочного редуктора типа ПЦР 3-36(6), разработанного авторами данной статьи.
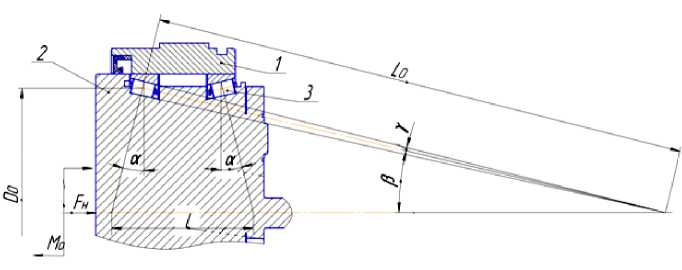
Рис. 2. Вариант компоновки совмещённых опор качения планетарно-цевочного редуктора типа ПЦР 3-36(6): 1 – корпус; 2 – водило; 3 – радиально-упорная совмещённая опора качения; α – угол контакта конического ролика; Мо – опрокидывающий момент; F H – внешняя осевая сила; L – расстояние между точками приложения опорных реакций; Lo – длина среднего конусного расстояния ролика; Do – диаметр центров комплекта роликов; β – номинальный угол контакта ролика; γ – угол конусности ролика
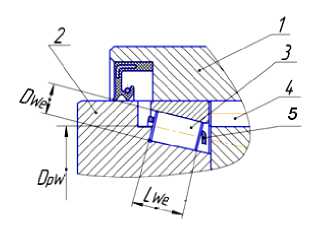
Рис. 3. Подшипниковый узел опоры водила: 1 – корпус редуктора; 2 – водило; 3 – конический ролик; 4 – цевка; 5 – сепаратор; D We – диаметр ролика; D pW – диаметр окружности центров торцов роликов; L We – длина ролика
Как видно из рисунка, совмещённые опоры качения ограничены, с одной стороны, параметрами водила 2 со всеми входящими в него элементами передач (на рисунке не показаны) и, с другой стороны, заданными габаритами корпуса редуктора 1. Внутренние кольца опор качения с беговыми дорожками выполнены заодно с корпусом водила. Наружные кольца являются вставными, что дает возможность за счет шлифовки их больших торцов регулировать рабочий зазор в подшипниках.
С целью получения необходимой динамической грузоподъемности подшипниковых опор при выборе диаметров конических роликов D We (рис. 3) необходимо ориентироваться на максимально возможные их размеры.
В соответствии с рекомендациями [4] диаметры роликов DWe можно принять из соотноше- ния
DWe = (0,5…0,53) h, где h = D – D0; D – диаметр наружной поверхности наружного кольца подшипника; D0 – диаметр окружности центров комплекта роликов (см. рис. 2).
При этом длина ролика определяется также в зависимости от величины h:
L We = (1,2…1,25)h.
Полученные значения D We и L We следует округлить до ближайших больших значений стандартных подшипников соответствующих серий. При этом следует расчётным путём проверить обеспечение достаточной прочности беговых дорожек, выполняемых на корпусе водила, и технологической жесткости наружных колец подшипников, устанавливаемых в корпусе передачи.
Угол при вершине конуса ролика α р = 2γ, как видно из рис. 2, жестко связан с углом контакта ролика α и расположением роликов относительно оси вращения водила, определяемым диаметром их центров D 0 . Значение диаметра D 0 непосредственно зависит от габаритов водила и размеров входящих в его состав деталей, которые, как правило, при предварительной конструктивной проработке принимаются минимальными. В связи с этим углы контакта ролика обычно задаются.
Применение конических роликов по размерам соответствующих роликам стандартных подшипников не всегда оказывается возможным. Это связано прежде всего с тем, что для стандартных радиально-упорных подшипников диаметр центров конических роликов обычно не совпадает с диаметром центров роликов проектируемой совмещённой опоры качения. Обеспечение совпадения вершины конуса ролика с осью вращения водила приходится осуществлять за счет изменения угла контакта. Во многих случаях это приводит к значительному увеличению угла контакта ролика, и совмещённая опора качения приобретает свойства упорно-радиального подшипника, а в некоторых случаях это оказывается вообще невозможным.
Увеличение угла контакта ролика приводит к нежелательному снижению динамической радиальной грузоподъемности подшипниковой опоры водила. Это является очевидным при рассмотрении зависимости для ее определения, имеющей вид [5]
С=bmfc(iLWecos α)7/9Z3/4 DWe29/27, где С – динамическая радиальная грузоподъемность подшипника; bm – коэффициент, характеризующий свойства стали с учетом способа ее изготовления; fc – коэффициент, зависящий от геометрии деталей подшипника, точности их изготовления и материала; i – число рядов роликов в подшипнике; LWe – длина ролика, мм; α – угол контакта ролика; Z – число роликов в однорядном подшипнике; DWe – диаметр ролика, мм.
Увеличение угла контакта ролика α уменьшает значение cos α и соответственно снижает значение динамической радиальной грузоподъемности подшипника. Кроме этого величина коэффициента f c определяется по табличным данным в зависимости от отношения (D We cos α )/D 0 , и при его уменьшении уменьшается и величина этого коэффициента, оказывая также отрицательное влияние на динамическую грузоподъемность подшипника.
Необходимо также учитывать, что в радиально-упорных подшипниках действует и гироскопический момент, связанный с изменением направления оси вращения роликов в пространстве, T г .
Т г = Iω р ω с sin α , где I – момент инерции ролика относительно своей оси вращения; ω р – угловая скорость ролика вокруг своей оси; ω с – угловая скорость вращения сепаратора; α – угол контакта ролика.
Увеличение гироскопического момента при увеличении угла контакта ролика отрицательно влияет на работоспособность подшипников, увеличивает износ как тел качения, так и беговых дорожек.
В связи с изложенным при принятых по ранее приведенным рекомендациям значениях диаметра ролика D We и его длины L We , по всей видимости, следует задаваться углом контакта ролика α в пределах 9–19° в зависимости от характера и соотношения сил, действующих на подшипниковые опоры водила, а угол конусности ролика α р = 2γ уточнять расчетным путем. При этом возможна последующая коррекция угла конусности ролика за счет незначительного изменения угла контакта ролика.
В случае незначительных отклонений по конусности стандартного конического ролика не исключается возможность его применения в подшипниковом узле водила с корректировкой угла контакта. По завершению определения всех геометрических параметров совмещённых опор качения водила уточняются точки приложения опорных реакций и расстояние между ними, окончательно определяются нагрузки, действующие на них. По приведенной выше зависимости определяется динамическая грузоподъемность проектируемых опор качения и по принятой стандартной методике рассчитывается для наиболее нагруженной из них эквивалентная рабочая нагрузка. Заключение. Полученные результаты служат для определения ресурса работы совмещённых опор качения водила, который, в конечном итоге, сравнивается с заданным. При необходимости уточняются геометрические параметры и повторяется силовой расчет рассматриваемых опор качения.
Список литературы Определение геометрических параметров совмещённых конических опор качения водила планетарно-цевочной передачи типа 2K-V
- Кудрявцев В.Н. Планетарные передачи/В.Н. Кудрявцев. -Л.: Машиностроение, 1966. -307 с.
- Андре П. Проектирование роботов: пер. с французского/П. Андре [и др.]. -М.: Мир, 1986. -385 с.
- Патент РФ № 88406. Планетарно-цевочная передача/С.О. Киреев, Ю.В. Ершов. U1 F16H 1/48. Опубл. 10.11.2009. Бюл. № 31.
- Орлов П.И. Основы конструирования: справочно-метод. пособие/П.И. Орлов, П.Н. Учаев. В 2-х кн. Кн. 2. -М.: Машиностроение, 1988. -544 с.
- Перель Л.Я. Подшипники качения: Расчет, проектирование и обслуживание опор: справочник/Л.Я. Перель, А.А. Филатов. -М.: Машиностроение, 1992. -608 с.
