Определение границ областей существования механизмов-прототипов эксцентрикового механизма качения при вводе поправки в расчет по дорожке качения внутреннего кольца

Автор: Меснянкин М.В., Мерко М.А., Колотов А.В., Митяев А.Е.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Техника
Статья в выпуске: 12, 2012 года.
Бесплатный доступ
Рассмотрены вопросы определения границ областей существования механизма-прототипа при вводе поправки в расчет геометрических параметров эксцентрикового механизма качения посредством изменения величины радиуса дорожки качения внутреннего кольца. Полученные области позволяют исключить сочетания величин исходных данных, при которых задача расчета номинальных значений геометрических параметров эксцентрикового механизма качения (ЭМК) не будет иметь решения.
Механизм-прототип, область существования, эксцентриковый механизм качения, геометрические параметры, тела качения, дорожки качения
Короткий адрес: https://sciup.org/14082168
IDR: 14082168 | УДК: 621.838.2
Existence field limit determination of the mechanism-prototypes for the rolling eccentric mechanism while introducing correction data into calculation on the inner circle rolling track
The problems of existence field limit determination of the mechanism-prototype while introducing correction data into the calculation of rolling eccentric mechanism geometric parameters by means of inner circle rolling track radius size changing are considered. The received fields allow to exclude initial data size combinations, in which the task of calculating nominal values of rolling eccentric mechanism (REM) geometrical parameters will have no solution.
Текст научной статьи Определение границ областей существования механизмов-прототипов эксцентрикового механизма качения при вводе поправки в расчет по дорожке качения внутреннего кольца
Авторами проведен ряд работ, направленных на разработку механизмов со сложным движением выходного звена на базе ЭМК [1–4], анализ результатов которых показывает, что задача определения номинальных значений геометрических параметров эксцентрикового механизма качения, независимо от направления ввода поправки в выполняемый расчет, весьма затруднена исходя из её нелинейности, а в некоторых случаях не имеет решения. Указанная ситуация является следствием выбора неверного сочетания величин исходных параметров при решении задачи определения номинальных значений геометрических параметров ЭМК.
Цель . Разработка алгоритма решения представленной проблемы при вводе поправки в расчет по дорожке качения внутреннего кольца посредством определения границ областей существования механизма-прототипа.
Применение предлагаемого подхода позволяет исключить сочетания величин исходных параметров, при которых задача определения номинальных значений геометрических параметров эксцентрикового механизма качения не имеет решений.
Задачи:
-
- определение пределов условия сборки механизма-прототипа;
-
- вывод формул для расчета величин радиусов дорожки качения внутреннего кольца и тел качения механизма-прототипа;
-
- формирование диаграммы областей существования механизма-прототипа;
-
- определение границ областей существования механизмов-прототипов;
-
- анализ полученных результатов.
Согласно [5], условие сборки механизма-прототипа имеет вид: число тел качения (z) на угле расположения от 0 до 2 п должно являться целым числом, тогда в аналитическом виде получим z-6 = п,(1)
где м • Г R2 - R1 к
0 = arcsinl 21 I,( к R 2 + R1 )
где R 1 , R 2 - радиусы дорожек качения внутреннего и наружного колец.
Анализируя (2), получаем пределы значений данного параметра:
при R 1 = 0 0 = 0,5 •п ;
при R 2 = 0 0 = —0>л ;
при R 1 = R 2 0 = 0 .
С учетом выявленных пределов для (2) анализ (1) показывает, что условие сборки механизма-прототипа выполняется при z > 2 .
Преобразуя (1) с учетом (2), получим
R 2 •
R 1 =
Г
1 — sin к


Зная, что R 1 = R 2 — 2 • r , приведем (3) к виду
R r = —
1 — sin
п
к
кz)
1 + sin —
к z ))
,
где r - радиус тел качения.
Варьируя числом тел качения в интервале 0...100, проведем вычисления по (3) и (4) для значений радиуса дорожки качения внешнего кольца 55, 60, 70, 80, 90 и 100 мм. Предварительный анализ полученных результатов позволяет провести уточнение: условие сборки механизма-прототипа выполняется при z > 2, т. е. минимально возможное число тел качения, независимо от их вида, может быть равно трем. Используя результаты вычислений, построим диаграмму зависимостей радиусов дорожки качения внутреннего кольца и радиусов тел качения от их количества. Посредством наложения функциональных кривых получаем области существования механизма-прототипа эксцентрикового механизма качения (рис.).
С целью формирования областей существования механизма-прототипа ЭМК нанесем их границы на диаграмму (рис.). В результате проведенных действий получим три области существования механизма-прототипа.
Анализ результатов вычислений, проведенных по (3) и (4), показывает, что область А ограничена значениями 3 < z < 6 при 0 < R 1 / r < 1, что соответствует области существования механизма-прототипа с телами качения, обладающими радиусами, превышающими радиус дорожки качения внутреннего кольца.
Если тела качения механизма-прототипа являются шариками, то, следуя работе [6], число тел качения определим как z =--------у-------^+1, (5)
r
-
2 • arcsin -------
- I R 2 - Г )
где ф - угол заполнения.
Считая, что в формуле (5) угол заполнения лежит в пределах 186 0 < ф < 200 0 [6], а радиус дорожки качения наружного кольца лежит в интервале 55…100 мм, сформируем область В , которая ограничена значениями 6 < z < (32...57) при 1 < R 1 r < 10, что соответствует области существования механизма-прототипа с телами качения в виде шариков, обладающими радиусами меньше радиуса дорожки качения внутреннего кольца. Анализ рисунка показывает, что рост значений радиуса дорожки качения наружного кольца сопровождается увеличением радиуса дорожки качения внутреннего кольца при незначительных изменениях радиуса шариков, что также сопровождается смещением максимальной границы области В в положительном направлении оси числа тел качения в интервале 32…57.
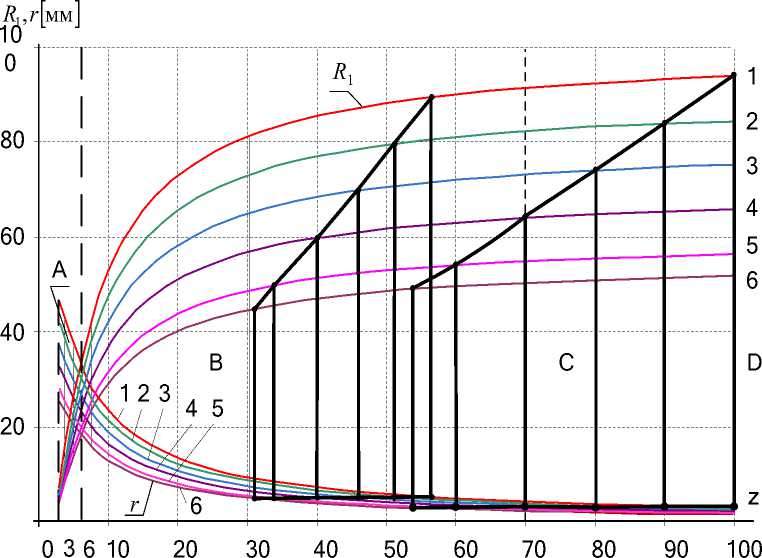
Диаграмма областей существования механизма-прототипа при постоянном радиусе дорожки качения наружного кольца: 1 - R 2 = 100 мм ; 2 - R 2 = 90 мм ; 3 - R 2 = 80 мм ;
4- R2 = 70мм; 5- R2 = 60мм; 6- R2 = 55мм
Если тела качения механизма-прототипа являются роликами, то, следуя работе [6], число тел качения определим как
п
—
arcsin
l
2 • г
R 2 — Г )
arcsin
l
r
+ 2 .
R 2 — Г )
Варьируя в формуле (6) значением радиуса дорожки качения наружного кольца в интервале 55^100 мм, сформируем область С , которая ограничена значениями 6 < z < (53^100) при 1 < R 1 / r < 31, что соответствует области существования механизма-прототипа с телами качения в виде роликов, обладающими радиусами меньше радиуса дорожки качения внутреннего кольца. Анализ рисунка показывает, что рост значений радиуса дорожки качения наружного кольца сопровождается увеличением радиуса дорожки качения внутреннего кольца при еще более незначительных изменениях радиусов роликов, что также сопровождается смещением максимальной границы области С в положительном направлении оси числа тел качения в интервале 53…100.
Дальнейшее увеличение радиусов дорожек качения обоих колец показывает на существование области D, которая ограничена значениями 100 < z при 31 < R 1 /r , что соответствует области существования механизма-прототипа с телами качения в виде иголок (малые ролики), обладающими радиусами значительно меньше радиуса дорожки качения внутреннего кольца.
Выводы. Анализ полученных областей существования механизма-прототипа показывает, что при выборе исходных данных для определения номинальных значений геометрических параметров эксцентрикового механизма качения необходимо придерживаться области, сформированной наложением частями областей В и С в интервале 6 < z < 53 при 1 < R 1 /r < 16, так как при 53 < z и 16 < R 1 /r эксцентриситет ЭМК имеет очень малые значения, а число тел качения достаточно велико независимо от их вида. Данные рекомендации позволяют исключить сочетания исходных данных, при которых задача определения номинальных значений геометрических параметров эксцентрикового механизма качения не имеет решения.
