Определение характеристик цифровых регуляторов импульсных преобразователей напряжения

Автор: Лопатин А.А., Дружинин А.А., Асочаков А.С., Пучков А.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 3 т.21, 2020 года.
Бесплатный доступ
Развитие космического приборостроения идет по пути цифровизации. В частности, энергопреобразующая аппаратура космических аппаратов модернизируется путем внедрения цифровых систем автоматического управления взамен аналоговых. Это приводит к повышению эффективности системы электропитания, но в то же время возникает необходимость в создании способов определения их характеристик, которые позволят с высокой степенью точности подтвердить соответствие изготовленного прибора заданным при проектировании требованиям технического задания. В статье описаны особенности функционирования и предложен способ определения характеристик цифрового канала управления импульсным преобразователем напряжения. Предложенный подход представляет собой инструментарий для проверки правильности реализации как аппаратных частей канала управления, так и самого регулятора, представляющего собой программный код, реализованный на цифровых управляющих устройствах. Метод основан на определении степени соответствия откликов на типовые внешние воздействия аппаратно реализованного канала управления и его модели. На основе передаточных функций цифровых фильтров с бесконечной импульсной характеристикой и конечной импульсной характеристикой, с использованием типовых встроенных моделей, в пакете имитационного моделирования Matlab Simulink смоделирован канал управления импульсным преобразователем напряжения, соответствующий испытываемому аппаратно-реализованному устройству. Описаны основные принципы построения программной архитектуры обеспечения эксперимента. Разработана структурная схема испытательного комплекса, включающая источники внешнего воздействия, сам канал управления и средство управления проведением испытаний (в данном случае персональный компьютер). Приведен пример применения такой методики для верификации параметров разработанного пропорционально-интегрального дифференциального регулятора. Экспериментально показана работоспособность и точность предложенного способа определения характеристик канала управления по реакции на последовательность прямоугольных импульсов и путем построения логарифмической амплитудно-фазовой частотной характеристики. Применение такого метода верификации в условиях производства позволит обеспечить полную проверку отдельных цифровых управляющих устройств энергопреобразующей аппаратуры с замкнутыми обратными связями еще на этапе разработки приборов, что позволит исключить ошибки в реализации регуляторов в контурах управления.
Тестирование, импульсный преобразователь напряжения, цифровой регулятор, эталонная модель, отклик, типовое воздействие
Короткий адрес: https://sciup.org/148321990
IDR: 148321990 | УДК: 681.2 | DOI: 10.31772/2587-6066-2020-21-3-409-416
Determination of the digital controller's characteristics of the switched-mode power converters
The development of spacecrafts equipment is on the way to digitalization. In particular, energy spacecraft conversion devices are being modernized by introducing digital automatic control systems instead of analog ones. This leads to an increase in the efficiency of the power supply system, but at the same time, there is a need to create methods to determine characteristics that will confirm with a high degree of accuracy and conformity of the manufactured sample with the technical requirements specified during its design. The article describes the features of functioning and methodology for determining digital control channel of a pulse voltage converter’s characteristics. The proposed approach is a toolkit for verifying the correct implementation of both the hardware parts of the control channel and the controller, which is a program code implemented on digital control devices. The technique is based on determining the degree of responses correspondence to typical external influences of a hardware-implemented control channel and its model. Based on the transfer functions of the IIR and FIR digital filters, using standard builtin models, the control channel of the pulse voltage converter corresponding to the tested hardware-implemented device is simulated in the package Matlab Simulink. The basic principles of building the software architecture experiment are described. A block diagram of the test complex has been developed, including sources of external influence, control channel, and a test management tool (in this case, a personal computer). An example of applying such a technique to verify the parameters of the developed PID controller is given. Operability and accuracy of the proposed method to determine characteristics of the control channel by reaction to a sequence of rectangular pulses, and by constructing the AFCL are experimentally shown. Application of this verification method to production conditions will allow a complete check of individual central control units (CCU) of energyonverting equipment with closed feedbacks even at the stage of devices development, which will eliminate errors in the implementation of regulators in control loops.
Текст научной статьи Определение характеристик цифровых регуляторов импульсных преобразователей напряжения
Введение. Эксплуатация приборов космической техники имеет свои специфические особенности. Это высокая стоимость отказа, отсутствие возможности ремонта и длительный срок непрерывной эксплуатации в условиях радиационного воздействия космического пространства. В связи с этим все приборы, которые проектируются для космической техники, проходят полный цикл проверок и испытаний, которые различаются по регламенту, физической природе, и величинам возмущающих воздействий. Для обеспечения надежности и качества производимой аппаратуры применяется многоступенчатая проверка прибора, которая включает испытания по иерархической системе [1]. Так проводят проверку параметров всех применяемых электрорадиоизделий, испытывают на соответствие требованиям технического задания сначала отдельные узлы прибора, затем автономно прибор в составе космического аппарата (КА). На сегодняшний день космическая техника активно развивается и модернизируется, в связи с этим важной задачей остается разработка методов тестирования бортовой аппаратуры.
Одним из направлений развития космической техники является модернизация системы электропитания, и, в частности, энергопреобразующей аппаратуры. Совершенствование микроэлектроники и электронной компонентной базы позволило начать внедрять микропроцессорные системы для управления процессами стабилизации и регулирования напряжения и тока шины питания. Цифровые системы автоматического регулирования (ЦСАР) имеют ряд преимуществ по сравнению с аналоговыми системами, среди них можно выделить гибкость настройки параметров и независимость характеристик от внешних климатических воздействий [2], что является важным свойством для длительной эксплуатации в условия внешних воздействующих факторов космического пространства.
Внедрение цифровых регуляторов в микропроцессорных системах ставит задачу разработки способов определения их характеристик. Способы определения характеристик аналоговых регуляторов широко известны. Аналоговые регуляторы – это операционные усилители, охваченные обратной связью из цепей реактивных элементов. Применяемые для регуляторов элементы проходят входной контроль параметров и ряд электрических и температурных испытаний, направленных на выявление дрейфа параметров. После этого регулятор подвергается электрическим и функциональным испытаниям. Цифровой регулятор, в отличие от аналогового – это программный код для цифрового управляющего устройства (ЦУУ), состоящий из операций запоминания значений переменных, умножений на константы и сложений [3]. В случае если микропроцессорная система используется для управления импульсным преобразователем напряжения, входной сигнал - сигнал обратной связи (ОС) для цифрового регулятора преобразуется с помощью аналого-цифрового преобразователя (АЦП), а выходной сигнал формируется с помощью цифрового широтно-импульсного модулятора (ЦШИМ). Так как подход к физической реализации цифрового и аналогового регуляторов значительно различаются, методы тестирования, применяемые к каналу управления аналоговой системы, не подходят для тестирования микропроцессорной системы.
В связи с этим в данной работе предложен способ определения характеристик канала управления импульсным преобразователем напряжения. Предложенный метод прошел верификацию в ходе испытаний макетного образца ИПН.
Вначале будет дано описание объекта испытаний, которым является канал управления импульсного преобразователя напряжения, будут выделены его особенности, опираясь на которые разработан подход к его тестированию. Далее объясняется метод определения параметров, какое программное обеспечение необходимо для реализации предложенного метода, и поясняются особенности функционирования испытательного комплекса. Следующим шагом приводятся результаты экспериментальной верификации предложенного метода, путем определения степени соответствия характеристик аппаратно реализованного канала управления ИПН с результатами имитационного моделирования.
Объект испытаний. Объектом испытаний является канал цифровой системы управления импульсным источником питания, который изображен на рис. 1.
Канал управления состоит из датчика, аналого-цифрового преобразователя, формирователя сигнала ошибки, цифрового регулятора и широтно-импульсного модулятора [4].
Процесс функционирования канала управления можно описать следующим образом. С датчика приходит сигнал, отражающий значение физической величины. Этот сигнал оцифровывается АЦП и поступает на вход формирователя сигнала ошибки. Оцифрованный сигнал вычитается из задания управления, в результате чего формируется сигнал ошибки. Сигнал ошибки обрабатывается цифровым регулятором, который рассчитывает сигнал управления. Сигнал управления поступает на ЦШИМ.
Канал управления
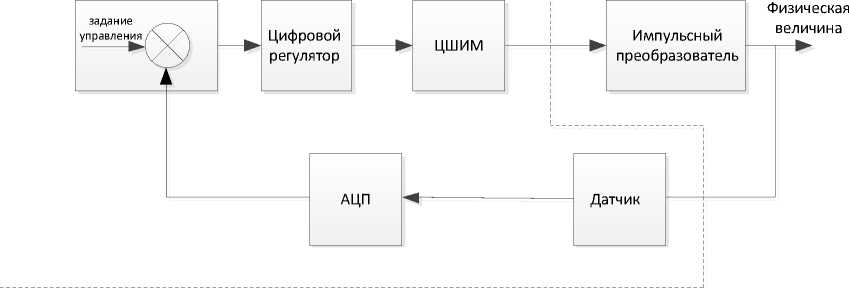
Fig. 1. Pulse converter control channel
Рис. 1. Канал управления импульсным преобразователем
Существует несколько способов реализации канала управления [5]. Это может быть микроконтроллер или цифровой сигнальный процессор (ЦСП) со встроенными АЦП, регулятором и ЦШИМ, или это может быть программируемая логическая интегральная схема (ПЛИС) на которой выполнен регулятор и ЦШИМ, а АЦП – это внешнее устройство. Однако подход к тестированию будет идентичным.
Главным элементом тестирования является цифровой регулятор. Как математический объект, регулятор представляет собой цифровой фильтр с бесконечной импульсной характеристикой (БИХ – фильтр), либо цифровой фильтр с конечной импульсной характеристикой (КИХ – фильтр) [6]. Формулы передаточных функций БИХ (1) и КИХ (2) фильтров в общем виде приведены ниже.
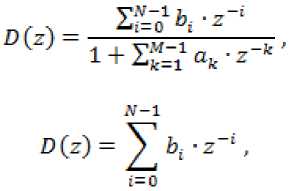
где b i , a k – коэффициенты регулятора, z-i элемент задержки на такт работы регулятора.
Цифровой фильтр, в зависимости от структуры и значений коэффициентов обладает рядом уникальных для данного исполнения статических и динамических характеристик [7]. Это свойство хорошо проявляются путем определения реакции на типовые воздействия, среди которых ступенчатое, импульсное и гармоническое воздействия. Все реакции будут также уникальны для данного фильтра. Исходя из этого свойства, будет построена методика проверки канала управления.
Так как регулятор – это программный код, состоящий из простейших арифметических операций, он может быть промоделирован в системе имитационного моделирования Matlab Simulink. Методы моделирования цифровых фильтров в этом пакете хорошо известны и показали свою эффективность [8]. Также с заданной точностью в данном пакете могут быть промоделированы АЦП – в виде коэффициента передачи, и внешние типовые сигналы возмущения. Таким образом, при помощи моделирования возможно получить точную реакцию цифрового фильтра на типовые воздействия.
По описанному аппаратно реализованному каналу управления была разработана модель в Matlab Simulink (рис. 2). В модели в качестве регулятора применен ПИД – регулятор, а блоком FPGA обозначен источник сигнала, который представляет сигнал, полученный с макета канала управления ИПН.
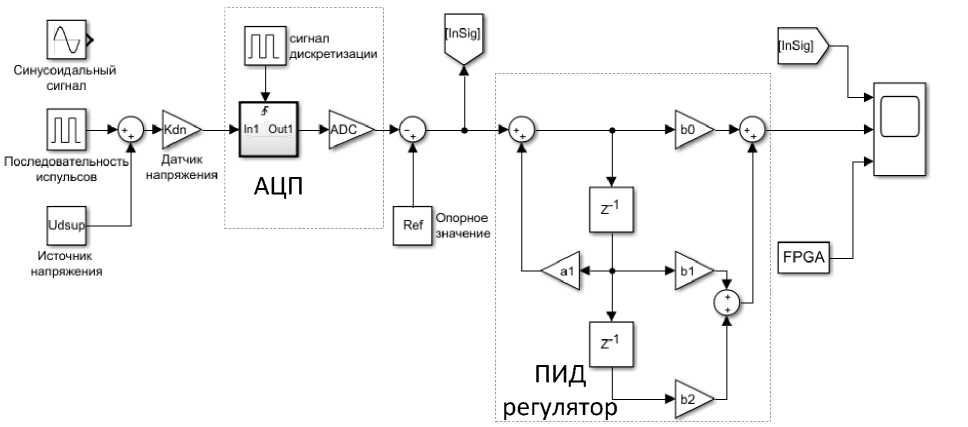
Fig. 2. Control channel model in Matlab Simulink
Рис. 2. Модель канала управления в Matlab Simulink
Структурная схема аппаратной реализации измерения реакции цифрового фильтра на типовые воздействия приведена на рис. 3.
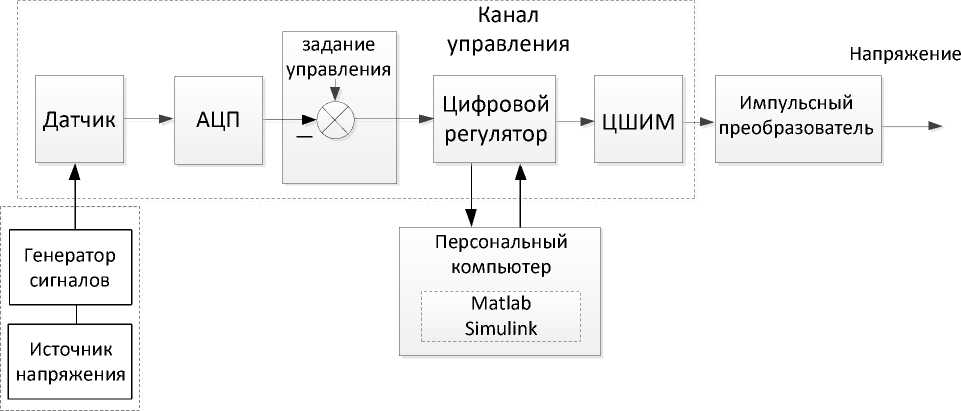
Fig. 3. Scheme of experimental determination of control channel characteristics
Рис. 3. Схема экспериментального определения характеристик канала управления
Источником возмущающего воздействия является последовательное соединение источника постоянного напряжения и генератора сигналов. В рассматриваемом случае в состав регулятора входит интегральная составляющая, поэтому наличие в сигнале ошибки постоянной составляющей приведет к насыщению цифрового регулятора, что не позволит получить отклик на какое-либо воздействие. Таким образом, для корректной работы необходимо выбрать напряжение источника и амплитуду сигнала генератора таким образом, чтобы выполнялось соотношение 3 [9].
гТ
I (Ref — Udsup — Udgen^dt = 0,
здесь Ref – задание управления, Udsup, Udgen - оцифрованные значения источника напряжения и сигнала генератора соответственно на входе датчика, T – период сигнала генератора.
В соответствии с рис. 3, суммарное напряжение источника и генератора преобразуется датчиком и поступает на вход АЦП. Сигнал с выхода АЦП используется для получения сигнала ошибки регулирования и поступает на вход цифрового фильтра. Между цифровым управляющим устройством, где реализован цифровой фильтр, и персональным компьютером установлена интерфейсная связь [10]. Для получения результатов измерения также используется Matlab. Подробно о программе для ЦУУ, и его взаимодействии с персональным компьютером будет подробно изложено в следующем разделе. В результате эксперимента на персональном компьютере в среде Matlab выводятся графики, представляющие входной сигнал аппаратно реализованного регулятора и его отклик на этот сигнал.
В результате в одной среде моделирования будут получены отклики на типовые воздействия модели спроектированного канала управления и отклики на аналогичные типовые воздействия, полученные при испытаниях аппаратно реализованного канала управления. Путем сопоставления полученных сигналов можно сделать однозначный вывод о том, корректно ли реализован канал управления ИПН. Если канал управления работает корректно – сигналы должны совпадать.
Программное обеспечение. Цифровые системы автоматического регулирования могут строиться на цифровых сигнальных процессорах (DSP), универсальных микроконтроллерах или программируемых логических интегральных микросхемах (ПЛИС).
Современные универсальные микроконтроллеры имеют широкие возможности для формирования управляющего воздействия и поддерживают операции цифровой обработки сигналов (ЦОС), что позволяет применять их в системах управления энергопреобразующей аппаратуры [11]. Наиболее распространенными универсальными микроконтроллерами можно считать встраиваемые 32-разрядные микроконтроллеры. К таким процессорам относится 32-разрядный микроконтроллер STM32 компании STMicroelectronics. В космической технике для обеспечения стойкости к вешним воздействиям широко применяется 32-разрядный микроконтроллер 1986ВЕ8 компании Миландр.
Цифровые сигнальные процессоры по сравнению с универсальными микроконтроллерами общего применения, позволяют максимально ускорить выполнение типовых задач цифровой обработки сигналов, таких, как цифровая фильтрация, преобразование Фурье, поиск сигналов и т.п [12]. Поэтому сигнальные процессоры оптимизированы по быстродействию для выполнения именно таких операций. В энергопреобразующей аппаратуре широко применяются DSP процессоры TMS320 или специализированные микроконтроллеры UCD3138 компании Texas Instruments.
ПЛИС хорошо подходят для таких устройств как радиолокационные установки, системы радиотехнической разведки, системы обработки изображений, устройства обработки сигналов и т.д., т.е. они предназначены в первую очередь для тех устройств, в которых производится обработка сигналов и векторные или матричные вычисления. Ввиду способности выполнять громоздкие параллельные вычисления ПЛИС стали широко использоваться в сложных приложениях [13]. Работая на сравнительно невысоких тактовых частотах порядка сотен МГц, они могут производить десятки тысяч вычислений за один такт и при этом потреблять гораздо меньше энергии, чем микропроцессоры при такой же производительности.
В макете ИПН использовалась ПЛИС cyclone IV (EP4CE22F17C6N) [14] компании Altera, которая является косвенным аналогом отечественной радиационно-стойкой ПЛИС 5578ТС064 производства ВЗПП-С и 12-и разрядное АЦП ADC128S022 с цифровым интерфейсом SPI компании Texas Instruments. На ПЛИС реализован блок управления АЦП по интерфейсу SPI и регулятор по структуре и коэффициентам аналогичный модели.
Структурная схема работы программы представлена на рис. 4.
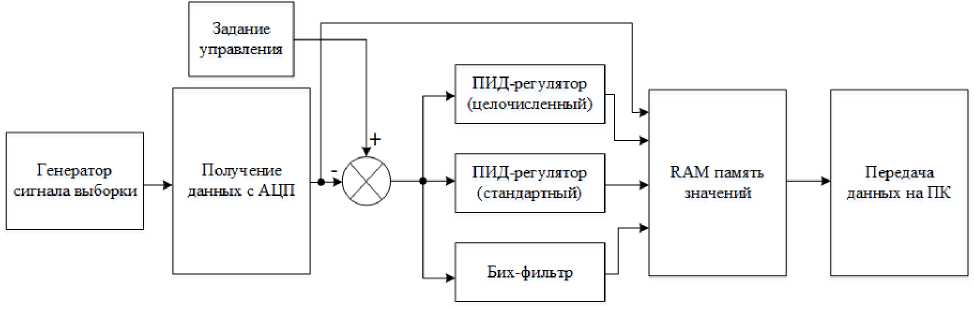
Fig. 4. Block diagrams of the program on the FPGA Cyclone IV
Рис. 4. Структурные схемы работы программы на ПЛИС Cyclone IV
Поскольку для расчёта регуляторов в используемой ПЛИС необходимо производить вычисления с плавающей запятой, в ПЛИС применялись вычислительные блоки по стандарту IEEE 754 [15].
С частотой 100 кГц происходит захват значений с АЦП и расчёт регуляторов. Данные АЦП и отклики регуляторов передаются во внутреннюю память RAM ПЛИС.
После завершения эксперимента данные передаются на компьютер по интерфейсу UART в систему имитационного моделирования Matlab и выводятся на виртуальный осциллограф для сравнения с аналогичными сигналами, измеренными в имитационной модели .
В ходе работы были реализованы три типа регуляторов и оценены их быстродействие и используемые ресурсы при реализации на конкретной ПЛИС (EP4CE22F17C6N). Параметры представлены в табл. 1:
Таблица 1
Сравнительная таблица реализованных регуляторов
|
Регулятор Параметры |
Целочисленный регулятор |
Стандартный ПИД-регулятор |
БИХ-фильтр |
|
Опорная частота работы, МГц |
40 |
40 |
40 |
|
Время преобразования, нс |
350 |
1500 |
2000 |
|
Количество занимаемых логических элементов, шт. |
1393 |
2314 |
1452 |
|
Количество используемых блоков DSP, шт. |
10 |
7 |
7 |
Эксперимент. Для импульсного источника питания был разработан цифровой регулятор. В данном случае – это пропорционально-интегральный-дифференциальный (ПИД) регулятор, выполненный способом интегрирования по методу Эйлера. Данный регулятор был преобразован в БИХ – фильтр, структура соответствует формуле 1, и имеет коэффициенты, представленные в табл. 2.
Таблица 2
Значения коэффициентов БИХ -фильтра
|
Коэффициент |
Значение |
|
a 1 |
-1 |
|
a 2 |
0 |
|
b 0 |
2.647745 |
|
b 1 |
-5 |
|
b 2 |
2.354 |
В качестве возмущающих сигналов были выбраны последовательность прямоугольных импульсов и гармонические сигналы различной частоты.
Реакция на сигнал типа последовательность прямоугольных импульсов позволяет оценить соответствие коэффициентов регуляторов по величине выброса выходного сигнала, в результате реакции на изменение уровня возмущающего импульса, и по скорости изменения выходного сигнала регулятора, в результате интегрирования ошибки управления. В данном эксперименте в качестве сигнала возмущения был выбран сигнал типа последовательность импульсов размахом 3В (от 0 до 3 В), частотой 100 Гц и коэффициентом заполнения 0.5. Таким образом, на входе ПИД – регулятора будет числовой эквивалент импульсов напряжением от –1.5 до +1.5 В с нулевой постоянной составляющей, что необходимо для выполнения условия (3).
На рис. 5 приведены результаты эксперимента на воздействие типа последовательность импульсов. Пунктирной линией обозначен сигнал возмущения на входе фильтра, а сплошной линией – реакция на выходе фильтра. На верхнем графике – сигналы, полученные на имитационной модели, а на нижнем – сигналы, полученные в результате

|
8485 |
— |
||||||||||||
|
134 |
7 |
||||||||||||
|
-270.5 |
— |
— |
236.9 |
||||||||||
|
-13 |
66 |
— |
|||||||||||
|
-84 |
86 |
||||||||||||
Fig. 5. Responses of the model and CCU to the impact of sequence of impulses type
Рис. 5. Отклики модели и ЦУУ на воздействие типа «последовательность импульсов»
Как видно из графиков – отклики являются идентичными с незначительными различиями. Различия объясняются наличием в сигнале генератора искажений и шумов, а также погрешностями реального АЦП.
Регулятор в контуре обратной связи проектируется исходя из требований к характеристикам в частотной и временной областях объекта управления. Он должен корректировать частотную характеристику разомкнутого контура объекта управления таким образом, чтобы она удовлетворяла ряду требований, таким как частота среза и запас по фазе. Значит, ключевой характеристикой спроектированного регулятора является его Логарифмическая амплитудно-фазовая частотная характеристика (ЛАФЧХ). ЛАФЧХ определяется из реакции на гармонические воздействия на разных частотах. Для построения ЛАФЧХ в качестве возмущающих воздействий были выбраны гармонические сигналы амплитудой 1,5 В и частотами 100, 250, 500, 1000, 2500, 5000 и 10000 Гц. По откликам регулятора, полученным в результате испытаний на гармонические воздействия при заявленных частотах, была построена кусочно-линейная ЛАФЧХ БИХ – фильтра и сравнена с непрерывной теоретической характеристикой, разработанного регулятора.
На рис. 6 сплошной линией с выделенными точками обозначены ЧХ, полученные в результате эксперимента, а пунктирной линией – расчетные из ПФ регулятора.
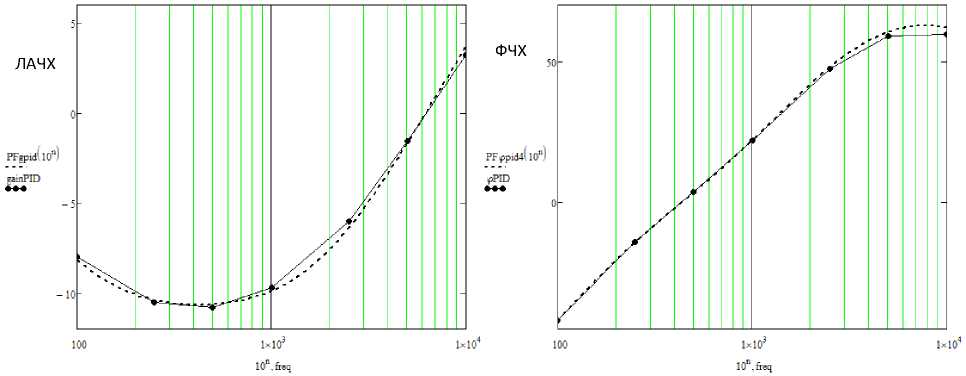
Fig. 6. Calculated from the TF filter, and obtained as a result of a full-scale experiment, Log-magnitude and Phase diagrams
Рис. 6. Расчетные из ПФ фильтра и полученные в результате натурного эксперимента ЛАЧХ и ФЧХ
Из рис. 6 можно сделать вывод, что динамические свойства на исследуемом диапазоне частот реализованного регулятора соответствуют расчетным с необходимой точностью.
Таким образом, по совокупности результатов проведенных экспериментов по сравнению откликов на типовые воздействия модели канала управления и реального тестируемого канала управления можно сделать однозначный вывод, что канал управления реализован верно и его характеристики соответствуют расчетным.
Заключение. В результате проделанной работы был предложен и проверен способ определения характеристик канала цифровой системы управления импульсным преобразователем напряжения, основанный на сравнении откликов канала управления и его модели на типовые сигналы возмущения и снятия ЛАФЧХ. Приведен пример применения такой методики для верификации параметров разработанного ПИД-регулятора. В ходе исследования ЦУУ макета ИПН подтвердилось, что отклики на воздействие типа последовательность прямоугольных импульсов совпадают, также совпали ЛАФЧХ модели и физического канала управления.
Предложенная методика может быть применена для тестирования цифрового канал управления не только импульсных преобразователей, но и других объектов управления, а для самого тестирования могут быть использованы любые необходимые сигналы возмущения, в том числе непериодические сигналы сложной формы.
Применение данной методики тестирования в условия производства позволит обеспечить полную проверку отдельных ЦУУ энергопреобразующей аппаратуры с замкнутыми обратными связями до окончательной сборки прибора и включения, что позволит исключить ошибки в реализации регуляторов контуров управления, которые могут привести к нежелательным нестационарным режимам работы энергопреобразующей аппаратуры.
Список литературы Определение характеристик цифровых регуляторов импульсных преобразователей напряжения
- GOSTR 53711-2009. Izdeliya elektronnoj tekhniki. Pravila priemki [State Standard R 53711-2009. Electronic products. Acceptance rules]. Moscow, 2009.
- Olsson G., Piani D. Cifrovye sistemy avtomatizacii i upravleniya [Digital automation and control systems]. SPb., Nevskiy Dialekt Publ., 2001, 557 p.
- Solodovnikov V. V. Tekhnicheskaya kibernetika. Teoriya avtomaticheskogo regulirovaniya. Kniga 1 Mate-maticheskoe opisanie, analiz ustojchivosti i kachestva sistem avtomaticheskogo regulirovaniya [Technical cybernetics. Theory of automatic regulation. Book 1 Mathematical description, analysis of stability and quality of automatic control systems.]. Moscow, Mashinostroenie Publ., 1967, 769 p.
- Corradini L., Macsimovich D. Digital Control of high frequency Switched-Mode Power Converters. Hobo-ken, New Jersey, 2015. 356 p.
- Meleshin V. I. Tranzistornaya preobrazovatel'naya tekhnika [Transistor Converter Technology]. Moscow, Tekhnosfera Publ., 2005, 632 c.
- Ayficher E., Dzhervis B. Cifrovaya obrabotka sig-nalov: prakticheskiy podhod [Digital Signal Processing: A Practical Approach]. Moscow, Vil'yams Publ., 2004, 992 p.
- Belov G. A. Dinamika impul'snyh preobrazovateley [Dynamics of pulse power converters]. Cheboksary, 2001, 528 p.
- Solonina A. I., Klionskij D. M., Merkucheva T. V., Perov S. N. Cifrovaya obrabotka signalov i Matlab [Digital Signal Processing and Matlab]. SPb., BHV-Peterburg, 512 p.
- John Rice. Accelerating Power-Supply Compliance to Specification. Available at: http://www.ti.com/lit/ ml/slup308/slup308.pdf (accessed 01.05.2020)
- Denisenko V. V. Komp'yuternoe upravlenie tekhnologicheskim processom, eksperimentom, oborudo-vaniem [Computer control of a technological process, experiment, equipment.]. Moscow, Goryachaya liniya -Telekom Publ., 2009, 608 p.
- Belyaev A., Solohina T., Yudincev V. [Modern digital signal processing devices. Together or apart?]. Elektronika: Nauka, Tekhnologiya, Biznes. 2009, No. 1(91), P. 28-35 (In Russ.).
- Shtraus V. Rynki DSP vysokogo klassa, raschi-tannye na bolee vysokiy dohod [High-end DSP Markets for Higher Income]. 2006.
- Markulov I. Elektronnye komponenty. 2011, No. 4, P. 3 (In Russ.).
- Rukovodstvo po ustrojstvu Cyclone IV [Cyclone IV device manual]. Kompaniya Altera, 2016, 490 p.
- IEEE 754-2008 Standart dvoichnoy arifmetiki s plavayushchey tochkoy [IEEE 754-2008 standard for binary floating-point arithmetic-Institute of Electrical and Electronics Engineers]. 2008, 23 p.
