Определение линейных характеристик опорных узлов ротора под нагрузкой

Автор: Лазарев С. И., Ломакина О. В., Галаев В. И.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1 т.20, 2020 года.
Бесплатный доступ
Введение. Статья посвящена аналитическим исследованиям динамической системы «ротор - опора с зазором», находящейся под технологической нагрузкой. Цель исследования - получить выражения для определения эквивалентных жесткостных характеристик системы.Материалы и методы. Рассмотрен ротор, вращающийся в упругих опорах с зазорами. Предложена динамическая модель, позволяющая рассматривать задачу определения линейных эквивалентных жесткостных характеристик опорных узлов. Для решения задачи составлена система дифференциальных уравнений и выполнен их детальный анализ.Результаты исследования. Из полученных уравнений динамики рассматриваемой системы можно рассчитать статический угол отклонения цапф ротора, обусловленный действием нагрузки. Предложенные выражения для определения эквивалентных жесткостных характеристик свидетельствуют о том, что можно исследовать динамику ротора как на линейных упругих опорах с указанными выше параметрами.Проанализирована полученная система уравнений и перечислены все частные случаи применения формул первого приближения для эквивалентных жесткостей опорных узлов ротора.Обсуждение и заключения. Полученные результаты позволяют исследовать многие динамические процессы на основе линейных дифференциальных уравнений, учитывая нелинейные свойства системы. Для тех строгальных машин, которые используются при работе с кожаными материалами, определение колебаний ротора в горизонтальной плоскости обеспечивает качество и точность операций.
Машиностроение, ротор, динамическое роторное оборудование, равновесие ротора, опорные узлы ротора, линейные эквивалентные жесткостные параметры узлов ротора, режимы работы ротора
Короткий адрес: https://sciup.org/142223722
IDR: 142223722 | УДК: 534:62-13 | DOI: 10.23947/1992-5980-2020-20-1-61-67
Determination of linear characteristics of rotor mounting groups under load
Introduction. The paper considers analytical studies on the “rotor - gapped-type support” dynamic system under process loading. The research objective is to obtain expressions for determining the equivalent stiffness characteristics of the system.Materials and Methods. A rotor rotating in the elastic gapped-type supports is considered. A dynamic model that enables to consider the problem of determining the linear equivalent stiffness characteristics of mounting groups is pro-posed. To solve the problem, a system of differential equations is compiled, and a detailed analysis is performed.Results. From the obtained dynamic equations of the system in question, we can calculate the static angular deviation of the rotor pins due to the action of the load. The proposed expressions for determining equivalent stiffness characteristics testify that it is possible to study the rotor dynamics as on the linear elastic supports with the above parameters. The obtained system of equations is analyzed, and all special cases of applying the first approximation formulas for equiva-lent stiffness of the rotor mounting groups are listed...
Текст научной статьи Определение линейных характеристик опорных узлов ротора под нагрузкой
УДК 534:62–13
Funding information: the research is done on theme no. 10.4798.2017/БЧ within the frame of the government task of RF Ministry of Education and Science in R&D
Введение. Технический прогресс предъявляет новые, более высокие требования к качеству продукции машиностроения. Главным образом речь идет о высокой надежности, долговечности машин, их продуктивности и безопасности. Все эти параметры должны быть учтены и рассчитаны на этапе разработки.
С точки зрения производственных процессов особое значение имеет динамическое роторное оборудование, обеспечивающее непрерывность технологического процесса [1–3]. В [4] представлены схемы конструкций и принцип работы различных роторных машин, выполнен патентный поиск по каждому их виду. В [5] рассмотрен характер зависимости эквивалентной жесткости от частоты колебаний для определенной модели, приведена зависимость критических частот от эквивалентной жесткости опор. В [6] авторы подробно рассматривают вопросы контроля вибрации, виброналадочных работ и предотвращения увеличения вибрации роторных машин, равновесия роторов. Кроме того, здесь перечислены источники вибрации и приводятся базовые сведения из теории колебаний. В работах [7–9] обсуждаются проблемы динамики жесткого неуравновешенного ротора с четырьмя степенями свободы. Исследование [10] базируется на допущении, что реакции подшипника — это квазилинейные силы с кубической нелинейностью. С учетом этого рассматривается воздействие радиального зазора на движение в пространстве динамически неуравновешенного ротора под влиянием сил внутреннего трения. В [11] показаны взаимосвязи поперечных и крутильных колебаний, возникающие при вращении ротора центрифуги. Разработана линеаризованная математическая модель ротора в упругих опорах, учитывающая влияние поперечных и крутильных колебаний.
Проведенный обзор литературы позволяет утверждать, что исследование колебательного процесса и соответствующих параметров линейных механических систем представляет интерес. В данной работе рассмотрен ротор, в частности его опорные узлы с зазорами. Цель исследования — определить значения под нагрузкой линейных эквивалентных жесткостных параметров названных узлов.
Материалы и методы. В качестве ротора использована динамическая модель, предусматривающая вращение в упругих опорах с зазорами (рис. 1).
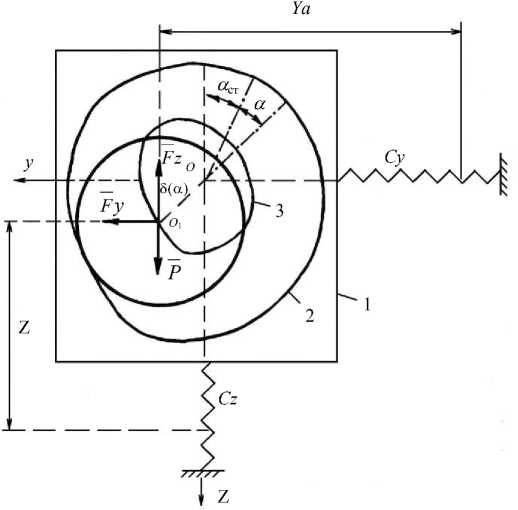
Рис. 1. Динамическая модель ротора, который вращается в упругих опорах с зазорами
На рис. 1 приняты следующие обозначения: 1 — опора ротора; 2 — граница контакта опоры с цапфой ротора; 3 — кривая относительного движения центра цапфы ротора; m — масса ротора; β (α) — радиальный зазор в роторных опорах (представлен функцией угла смещения его цапф от вертикальных направляющих); C y , C z — общие жесткости кожухов опорных узлов соответственно в горизонтальных и вертикальных направляющих; y ст z ст — статический сдвиг центра масс ротора в горизонтальном и вертикальном направлении, вызванный деформациями в опорных узлах; α — динамический угол наклона цапф ротора; αст — угол наклона от положения равновесия, вызванный технологической нагрузкой на ротор; y α, z α — полные динамические смещения центра масс ротора в указанных выше направлениях; f = Fz / Fy — взаимосвязь вертикальной и горизонтальной компонент технологической нагрузки.
Для определения потенциальной ( П ) и кинетической ( Т ) энергий исследуемой системы воспользуемся следующими равенствами:
П = 2 CyУ [Уа + Уст - 8 (“ + “ст ) sin (“ + “ст ) + 5 (“ст ) sin “ст ]2 +
+ 2 Cz [Za + Zст - 8 (a + «ст ) cos (a + aст ) + 8 (аст ) COs aст ]" -
-mg [Za + z- + 8 (аст ) COs аст ] >'
T = 2 m ( у 2 + z 2 ) + 2 A ® 2 .
Здесь A — полярный момент инерции, ® — угловая скорость вращающегося ротора.
Следует учитывать, что действующие силы не являются потенциальными. При этом обобщенные силы, которым соответствуют введенные ранее координаты y α, z α, α, примут вид:
Q y. = F y , Q a =- F ,
Q F [8(a + a ст) cos (a + a ст ) + 5'(a + a ст) sin (a + a ст )] +
“ У [ + f [ 8 ( a + a ст ) Sin ( a + a ст ) -8 ' ( a + a ст ) COS ( a + a ст ) ]
F
— взаимосвязь вертикальной и гори-
Здесь 8 (a + a ) — производная радиального зазора по углу a ; f = - ст Fy зонтальной компонент технологической нагрузки.
При данных условиях уравнения, выражающие динамику системы, можно записать: my a + C y • У . — C y 8 ( a + a ст ) Sin ( a + a ст ) + Cy 8 ( a ст ) Sin a ст = 0, mza + C z • z a - C z 8 ( a + a ст ) COS ( a + a ст ) + C z 8 ( a ст ) COS a ст = 0, mg [ 8 ( a + a ст ) Sin ( a + “ ст ) - 8 ' ( a + a ст ) COS ( a + a ст ) ] -
-
- Сy [ У а - 8 ( a + a ст ) Sin ( a + a ст ) + 8 ( a ст ) Sin a ст ] X
-
< X [ 8 ' ( a + a ст ) Sin ( a + a ст ) + 8 ( a + a ст ) COS ( a + a ст ) ] + + C z [ z a - 8 ( a + a ст ) COS ( « + a ст ) + 8 ( a ст ) COS a ст ] X X[ 8 ( a + a ст ) Sin ( a + a ст ) -8 ' ( a + a ст ) COS ( a + a ст ) ] =
Машиностроение и машиноведение
= F y
[ 8 ( a + a ст ) COS ( a + a ст ) + 8 ( a + a ст ) Sin ( a + a ст ) ] +
+ f [ 8 ( a + a ст ) Sin ( a + a ст ) -8 ( a + a ст ) COS ( a + a ст ) ]
Рассмотрев более детально третье уравнение системы (1), определим угол наклона ac m, считая a = 0.
После преобразований в уравнениях (1) получим более простую систему:
y yz ya экв ya экв a ,
z zy a экв a экв ya .
Анализ уравнений (2) позволяет в первой аппроксимации значений рассматривать упругую опору с зазором как опору с линейными упругими характеристиками (и в горизонтальных, и в вертикальных направляющих):
y yz z zy y экв ya экв a , z экв a экв ya .
Здесь
y _Cy [ mg • r + cos3 a ст (9 + f • z • z 2 • C )] z Cz [ mg • r + cos3 a ст (6 + f • z-62 • Cy )]
С экв = . , С экв = . ,
A A yz zy экв экв
C y C z cos 3 a ст ^6 • z ( 6 + f • z ) A
r = 52 (aст) + 2S'(acm)2 -S(aст )-8"(aст),
6 = 3 ( aст ) + 8'(aст )• tgaст , z = 5(aст )• tgaст - 3' ( aст ) , A = mg • r + cos3 a ст (6 + f • z )•( Cz • z2 + Cy •б2).
Результаты исследования. В системе (3) величины Cy , Cz , Cyz выражают эквивалентные характе- ристики жесткости опоры с зазором.
Чтобы получить зависимости эквивалентных характеристик жесткости нелинейной механической системы, воспользуемся разложением тригонометрических функций в системе (1), учитывая слагаемые более высокого порядка. Для определения необходимых величин укажем:
Уа = Ay • sin “1 t , za = Bz • cos “1 t , где Bz , Ay — амплитуда общего колебания ротора в вертикальных и горизонтальных направляющих соответ- ственно, m1 — частота колебаний.
Таким образом,
2п rm “J
CL = — I Фу ( У а , z a ) Sin “ 1 tdt ,
П A y 0
2 n
CL = "“H Ф ( У а , z a ) cOS “ 1 tdt •
П B 0
Здесь Фу (ya, za), Фz (ya, za) — функции координат ya, za. Эти величины можно определить, обратившись к системе дифференциальных уравнений (1).
Решая систему уравнений (4) методами интегрирования, представим величины в виде:
Cy экв
Cz экв
Cy (mgr + Cz cos a ст ■ b • z 2 ) ! CycOs a ст ^V•6• b' ( C^ ' 62 • A^ + C ' z 2 • Bz ) A 8A3
Cz ( mgr + Cy cos a ст ■ Ь ^ ) Cz'cos a ст 'У' z • Ь' ( C2 • 62 ' AS + Cz • z 2 • Bz )
A 8 A 3
Здесь
Ь = COS2 aст (6 + f • z) ,
У = 3 (a ст ) + 33' (a ст ) tga ст - 33''(a ст ) - S'" (a ст ) tga ст , ^ = 3 (aст ) tgaст - 33' (aст ) - 33" (aст ) tgaст + 3"' (aст ) •
Анализируя (5), можно говорить о взаимозависимости не только между жесткостями корпусов в опорах ротора Cy , Cz , но и амплитуд Ay , Bz его общих колебаний.
Необходимо подчеркнуть, что жесткость Cyz выражается как взаимосвязь движений ротора в горизон- тальной и вертикальной плоскостях. В случае Gyze = 0 в системе (2) уравнения не будут связаны, что позволяет учесть все возможные варианты. Они перечислены ниже.
— При отсутствии изменений радиального зазора со временем и a ст = 0 имеем C ^Ke = C z . Такой вариант характерен для холостого режима работы ротора. При этом радиальное смещение ротора по отношению к опоре в вертикальных направляющих является совсем небольшой величиной, хотя и более высокого порядка, чем смещение в горизонтальных направляющих.
— Если принять z = 0, то CzK6 = Cz. Данная ситуация свойственна радиальному перемещению ротора по отношению к опоре в окружении точки, через которую проходит горизонтальная касательная к траектории относительного движения центра цапфы.
— При нулевом значении величины радиального зазора в опорах имеем C ^^ = C y и Cz3 Ke = C z .
— Если отсутствуют изменения радиального зазора и а ст = 90 ° , то С^ = С . Это возможно, если ротор работает при технологической нагрузке с подобранным зазором, т. е. в горизонтальных направляющих радиальное смещение принимает малые значения по сравнению с вертикальным направлением.
— При 0 = 0 С^ = Су . В данном случае радиальные смещения ротора имеют место в окрестности точки, через которую проходит вертикальная касательная к линии относительного движения центра цапфы.
— Возможно выполнение равенства 0 + f - z = 0 . Это справедливо в случае радиального смещения ротора по отношению к опоре в окружении такой точки, через которую проведена нормаль, совпадающая с линией действия результирующей сил F r и F b . В этом случае С^ = С и С ^ = Cz .
Рассмотрим характеристики ротора на упругих опорах, жесткости которых равны Cy , Cz . Обозна-
чим 8 — эксцентриситет ротора, го — его угловая скорость. Уравнения колебаний представим в виде системы:
my a + С кв • ya = m -8-го 2 sin го i t mz a + С2жв - za = m - 8 - го 2 cos го t
Решая (6), запишем выражения для амплитуд колебаний:
A y
2 2
m-8-го m-8-го
------------т, B7 =------------г .
С У, - m -го 2 z С^ - m -го 2
Заметим, что слагаемые Cy , C z в знаменателях зависят от амплитуд Ay , Bz . Представим графически
рассматриваемую систему (рис. 2).
го 2,( го у )2,( го z )2
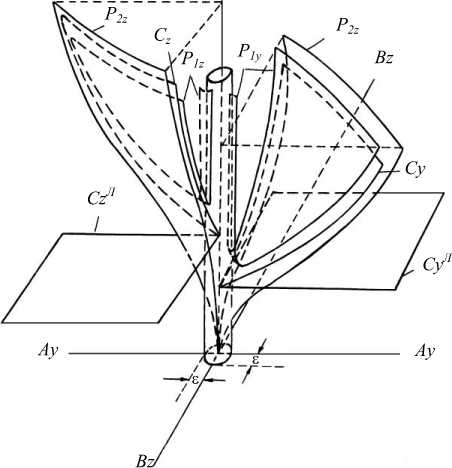
Рис. 2. Графическое представление динамических характеристик абсолютных колебаний ротора в опорах с зазорами
Поверхности P1y , P2y , P1z , P2z (резонансные) и Cy , Cz (скелетные) построены в предположении, что амплитуды Ay и Bz изменяются независимо на основании (7) и равенств Сув = m (гоу ) , СУв = m (гоZ) .
Амплитуды вынужденных колебаний Ay, Bz соответствуют частоте возмущающих сил го 0. Принимая во внимание этот факт, для получения выражений указанных амплитуд сначала построим плоскость го 2 = го 2 .
На линиях пересечения построенной плоскости с поверхностями P 1 y , P 2 y и P 1 z , P 2 z будут точки с идентичными координатами. Эти точки — искомые амплитуды колебаний ротора.
Плоскости CyЛ , CzЛ — скелетные поверхности линейной системы. В этом случае в выражениях для эквивалентных жесткостей берутся только первые слагаемые. Они указывают на то, что частоты свободных колебаний линейной системы не зависят от амплитуд.
Машиностроение и машиноведение
Резонансные поверхности представляют колебания ротора в горизонтальных направляющих, а скелетные — в вертикальных. Они построены в различных координатных октантах. По форме скелетные поверхности являются эллиптическими параболоидами. На рис. 2 ω cy , ω cz представляют собой частоты свободных колебаний системы.
Обсуждение и заключения. Одной частоте могут подходить несколько точек. Это означает, что в исследуемой системе возможно несколько режимов колебаний, в том числе неустойчивых. Для перехода системы с одного устойчивого режима движения на другой необходимы некоторые внешние воздействия, что характерно уже для нелинейных систем.
В качестве примера применения полученных зависимостей можно привести задачу о вынужденных колебаниях ротора вследствие его статической неуравновешенности.
Представленные в работе зависимости (4) указывают на то, что эквивалентные угловые жесткости взаимозависимы не только через жесткости C y , C z корпусов, но и через амплитуды A y , B z общих колебаний ротора.
В результате исследования линейных характеристик опорных узлов нагруженного ротора получены следующие результаты.
-
1. Предложена динамическая модель ротора, вращающегося в упругих опорах с зазорами. Данная модель позволяет исследовать задачи определения линейных эквивалентных жесткостных характеристик опорных узлов.
-
2. Проанализирована система уравнений и перечислены возможности применения формул. В частности, с их помощью можно определить колебания ротора в горизонтальной плоскости на строгальных машинах, используемых для получения заготовок кожи.
Список литературы Определение линейных характеристик опорных узлов ротора под нагрузкой
- Banaszek, S. The modeling of defects in the rotor-trains of turbomachinery-simulation-based diagnostics / S. Banaszek // Проблемы машиностроения. - 2013. - Т. 16, № 3. - С. 73-78.
- Галаев, В. И. Виброактивность взаимодействия системы неуравновешенных валов, вращающихся в упруго-массовых опорах / В. И. Галаев // Вестник Тамбовского государственного технического университета. - 2004. - Т. 10, № 3. - С. 747-754.
- Ломакина, О. В. Dynamic linearization of stiffness characteristics of elastic bearings with radial clearance of loaded rotor / О. В. Ломакина, В. И. Галаев // Вопросы современной науки и практики. Университет им. В. И. Вернадского. - 2011. - № 2 (33). - С. 387-393.
- Гринёв, Д. В. Конструктивные схемы и принципы работы роторно-лопастных машин / Д. В. Гринёв // Вестник Псковского государственного университета. - 2014. - № 5. - С. 142-150.
- Биялт, М. А. Расчетное исследование вибрационных характеристик динамической системы "Ротор - подшипники - опоры" / М. А. Биялт, А. А. Плотникова, Е. В. Урьев // Молодой ученый. - 2012. - № 11. - С. 23- 26.
- Гольдин, А. С. Вибрация роторных машин / А. С. Гольдин. - Москва: Машиностроение, 1999. - 344 с.
- Тимошенко, С. П. Колебания в инженерном деле / С. П. Тимошенко. - Москва: Машиностроение, 1985. - 440 с.
- Кельзон, А. С. Динамика роторов в упругих опорах / А. С. Кельзон, Ю. П. Циманский, В. И. Яковлев. - Москва: Наука, 1982. - 280 с.
- Кельзон, А. С. Динамика статически неуравновешенного ротора в подшипниковых опорах / А. С. Кельзон, А. С. Меллер // Доклады Академии наук СССР. - 1991. - Т. 318, № 1. - С. 69-72.
- Пасынкова, И. А. Установившиеся движения неуравновешенного ротора в подшипниках с радиальным зазором / И. А. Пасынкова // Вестник Санкт-Петербургского университета. - 2005. - Вып. 3. - С. 87-95.
- Вульфсон, И. И. Нелинейные задачи динамики машин / И. И. Вульфсон, М. З. Коловский. - Ленинград: Машиностроение, 1968. - 284 с.
