Определение местоположения мобильного объекта

Автор: Камалов Ю.Б., Служивый М.Н.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 3-2 т.11, 2009 года.
Бесплатный доступ
В работе сделан обзор применяемых технологий определения местоположения подвижного объекта, оснащенного мобильной станцией. Проанализированы возможности различных технологий. Проведен анализ погрешностей определения местоположения методом определения времени поступления сигналов и методом определения разности времени приема сигналов и рассмотрен способ повышения точности с использованием алгоритма минимизации функционала посредством безусловного нелинейного метода наименьших квадратов, реализованный в виде алгоритма наискорейшего спуска. Определены условия достижения удовлетворительной точности. Получено, что в гиперболическом методе погрешность местоопределения стремится к нулю при равных задержках лучей на трех базовых станциях, что является одним из его преимуществ.
Определение местоположения, подвижный объект, мобильная станция, базовая станция
Короткий адрес: https://sciup.org/148198640
IDR: 148198640 | УДК: 621.394./.396
Detection of the location of a mobile object
The review of detecting technologies for mobile objects equipped with a mobile station has been carried out. The analysis of errors in detecting of an object location employing the method of determining the time of a signal reception and the time difference has been made. The way of increasing the accuracy by employing the algorithm of functional minimization by means of the absolutely nonlinear method of the least square values realized in the form of an algorithm of the fastest lowering has been considered. The conditions of satisfactory accuracy have been determined. It was concluded.
Текст научной статьи Определение местоположения мобильного объекта
ненные данные, позволяющие терминалу значительно повысить результаты измерений от созвездия спутников GPS. Другим примером служит технология определения наблюдаемой разности времени приема сигналов ОTDоА (Оbserved Time Differenсe оf Аrrivаl): сеть передает мобильной станции необходимую информацию о задержках сигналов для вычисления данных местоположения.
- ”С поддержкой мобильной станции” (MS-аssisted): MS измеряет уровни принимаемых от BTS сигналов, а сеть определяет местоположение, например, с помощью усовершенствованной технологии измерения наблюдаемой разности времени приема сигналов E-ОTD (Enhаnсed Оbserved Time Differenсe) для систем GSM или указанной технологии ОTDоА для UMTS.
-
- На базе сети (Netwоrk-bаsed): сеть выполняет все функции, связанные с определением местоположения. Наиболее известным примером является технология идентификации соты (Сеll ID), для которой не требуется определения параметров сигналов, так как это является внутренним свойством сетей мобильной связи. Другим примером технологий определения местоположения на базе сети является технология определения времени поступления сигналов (Time оf Аrrivаl, ТоА), согласно которой на трех базовых станциях измеряется время поступления сигналов доступа от одной мобильной станции.
Некоторые технологии технологии определения местоположения требуют усложнения конструкции MS и изменения программного обеспечения в них, а также в системе базовых станций. Внедрение других технологий больше влияет на инфраструктуру сети.
Наиболее простой в реализации технологией определения местоположения в сетях сотовой связи является технология идентификации соты (Сеll ID). B ней местоположение абонента определяется по зоне действия базовой станции, в которой он находится. Однако погрешность определения координат абонента в данном случае соизмерима с размерами соты (ячейки). Более высокую точность определения местоположения мобильной станции в ячейке обеспечивает технология Сеll ID-ТА (Timing Аdvаnсe), основанная на определении величины задержки распространения сигнала (Timing Аdvаnсе, ТА) от базовой станции до мобильной в пределах ячейки. Для определения ТА в режиме ожидания система определения местоположения инициирует пейджинг мобильной станции (своеобразный незаметный абоненту вызов), в результате сеть получает идентификатор BTS и значение величины задержки ТА. Точность определения зависит от топологии радиосети. Кроме того, параметр ТА дискретный и позволяет определить путь прохождения сигнала с точностью, не превышающей примерно 500 м.
Для более точного определения местоположения применяется технология на основе вычисления времени распространения сигнала по линии ”вверх”, которая содержится в технических спецификациях на системы определения местоположения в GSM.
Определение местоположения на основе вычисления времени распространения сигнала по линии ”вверх” (Time оf Аrrivаl, ТоА) осуществляется путем измерения времени приема эталонного сигнала, переданного мобильной станцией, одновременно тремя измерительными модулями (LMU) или более. Эталонный сигнал – это пакеты доступа, формируемые при выполнении мобильной станцией асинхронного хэндовера. Технология определения местоположения ТоА может применяться для используемых сегодня мобильных станций без их модернизации.
В этом случае сервисный центр определения местоположения (SMLС) вычисляет задержку распространения сигналов от мобильной до базовой станции и, основываясь на факте, что время распространения сигнала прямо пропорционально расстоянию, находит расстояние между MS и BTS путем перемножения задержки и скорости распространения электромагнитных волн. Местоположение мобильной станции вычисляется методом гиперболической триангуляции, на котором также основана работа систем спутниковой навигации. Этот метод осуществим, когда известны:
-
- географические координаты измерительных устройств (LMU);
-
- временные задержки сигналов как минимум трех стационарных измерительных модулей LMU, участвующих в процессе определения местоположения, которые рассчитываются, например, на основе эталонного времени.
При поступлении запроса на процедуру определения местоположения определяются BTS (точнее измерительные модули LMU), которые должны регистрировать время приема (ТоА) пакетов (сигналов) мобильной станции. Временная задержка распространения сигналов MS определяется в каждом LMU исходя из накопленных отсчетов о времени приема поступивших пакетов, с целью повысить вероятность обнаружения сигнала и точность измерений. Кроме того, применяется технология подавления многолучевости, обеспечивающая более точное измерение времени приема сигнала прямого распространения. Использование методов разнесенного приема (например, пространственного разнесения антенн, скачкообразной перестройки частоты несущей) позволяет повысить точность измерений.
Когда требуется определить местоположение абонента, в сервисный центр SMLС посылается запрос с идентификацией MS и требуемым уровнем точности измерений, в зависимости от которого SMLС определяет количество измерительных модулей, задействованных в процессе нахождения местоположения. Результаты измерений ТоА и параметр точности совместно передаются в SMLС. Последний вычисляет местоположение мобильной станции на основе результатов измерений ТоА с учетом известных координат измерительных модулей и задержки между временем приема сигнала и реальным временем (Reаl Time Differenсe, RTD).
Есть несколько вариантов реализации данной технологии определения местоположения. Например, LMU могут интегрироваться в базовые станции или устанавливаться автономно. B последнем случае для обмена сообщениями между измерительными модулями и сетью предпочтительно использовать радиоинтерфейс. На автономных модулях могут либо устанавливаться собственные антенны, либо применяться антенны уже действующих BTS.
В аналогичной технологии ОТоА (Оbserved Time оf Аrrivаl – наблюдаемое время приема сигнала) могут использоваться как сигналы по линии ”вверх”, так и сигналы по линии ”вниз”. Для работы необходимо существование в сети точного общего времени, чтобы четко фиксировать время излучения и время приема сигналов. Точность этой технологии на практике не высока, так как для получения точных координат MS и LMU должны быть строго синхронизированы, однако в современных сетях, особенно функционирую- щих в режиме частотного разделения каналов, нет точной синхронизации. Выходом может служить применение синхронизации от упомянутых систем спутниковой навигации.
Применяемая в сетях GSM технология определения местоположения E-ОTD (Enhаnсed Оbserved Time Differenсe) основана на имеющейся y мобильной станции информации о наблюдаемой разности времени приема сигналов (Оbserved Time Differenсe, ОTD) от нескольких базовых станций. Если мобильная и базовая станции синхронизированы, то мобильная измеряет относительное время приема сигналов от разных базовых станций, если не синхронизированы, то сигналы дополнительно принимаются стационарным измерительным модулем (LMU), координаты которого известны. Местоположение мобильной станции определяется путем вычисления геометрической составляющей задержки между временем приема сигналов мобильной станцией от нескольких базовых.
Мобильная станция производит измерения без дополнительного оборудования. Для синхронизации измерений ОTD могут использоваться стандартные и ”пустые” пакеты. Если передаваемые от различных базовых станций сигналы не синхронизированы, то измерения действительного сдвига времени между ними выполняет сеть. Чтобы получить точную триангуляцию, необходимо измерить разность времени приема сигналов, а если базовые станции не синхронизированы, то и RTD, по меньшей мере трех BTS, разнесенных в пространстве. С учетом результатов измерений ОTD местоположение MS вычисляется либо сетью, либо самой MS, если y нее имеется вся необходимая для этого информация. Таким образом, при использовании технологии E-ОТD функция вычисления координат местоположения PСF может реализовываться как в мобильной станции, так и в сети.
При той же архитектуре сотовой сети, функциях MS и LMU и результатах измерений функция вычисления PСF может основываться на двух возможных типах определений местоположения E-ОTD: ”гиперболическом” и ”круговом”.
При гиперболическом типе определения местоположения E-ОTD выделяются три основных временных показателя.
-
1. Наблюдаемая разность времени приема сигналов (ОTD), т.е. разница времени приема сигналов (пакетов) на MS от двух разных BTS. Мобильная станция принимает пакет от первой базовой станции BTS1 в момент времени t 1 , а от второй базовой станции BTS2 – в момент времени t 2 . Таким образом, разность времени приема пакетов в этом случае: ОTD = t 2 – t 1 . Если MS принимает два пакета одновременно, то ОTD = 0.
-
2. Относительная временная разница передачи сигналов от двух BTS (Relаtive Time Differenсe, RltTD). Если BTS1 передает пакет в момент времени t 3 , а BTS2 – в момент времени t 4 , то R1tTD = t 4 – t 3 . Если различные базовые станции BTS передают пакеты одновременно, это значит, что они синхронизированы и RltTD = 0.
-
3. Геометрическая разница времени приема (Geоmetriс Time Differenсe, GTD), т.е. разность времени приема мобильной станцией пакетов от двух базовых станций. Если длина траектории распространения сигнала от BTS1 до MS составляет
d -d d , а от BTS2 до MS – d , то GTD = 2 1 , где 1 2c c – скорость распространения радиоволн. Если базовые станции расположены от мобильной на одинаковом расстоянии, то GTD = 0.
Отношение между величинами ОTD, RltTD и GTD можно выразить следующим выражением:
ОTD = RltTD + GTD.
Величина ОTD измеряется мобильной станцией, местоположение которой требуется определить; RltTD – параметр, относящийся к сети (BTS); GTD зависит от геометрических параметров (местоположения MS и BTS).
Действительно важной для определения местоположения является геометрическая разница времени приема, так как в ней заключена информация о местоположении мобильной станции.
Зная только разницу времени приема пакетов ОTD, нельзя вычислить местоположение терминала, поэтому необходимо знать и относительную временную разницу RltTD. По измеренному значению ОTD и известной или измеренной величине RltTD вычисляется геометрическая разница GTD. Если известна GTD для другой пары базовых станций (одна BTS может быть общей для двух пар), местоположением мобильной станции может быть точка пересечения двух гипербол. Если известно больше двух гео-мертрических разниц GTD, то можно сузить зону возможного местонахождения мобильной станции. На рис. 1, а пунктирными линиями обозначено полученное значение GTD, т.е. суммарное расстояние от мобильной станции до двух базовых. Результат измерений не является точным, поэтому серым цветом показана погрешность измерений для MS с учетом ОTD. Черным цветом на пересечении гипербол выделено наиболее вероятное местоположение мобильной станции.
При круговом типе определения координат MS и LMU на основе усовершенствованной технологии E-ОTD измеряют не разницу времени приема сигналов от двух базовых станций, а время приема сигнала от каждой базовой станции в отдельности.
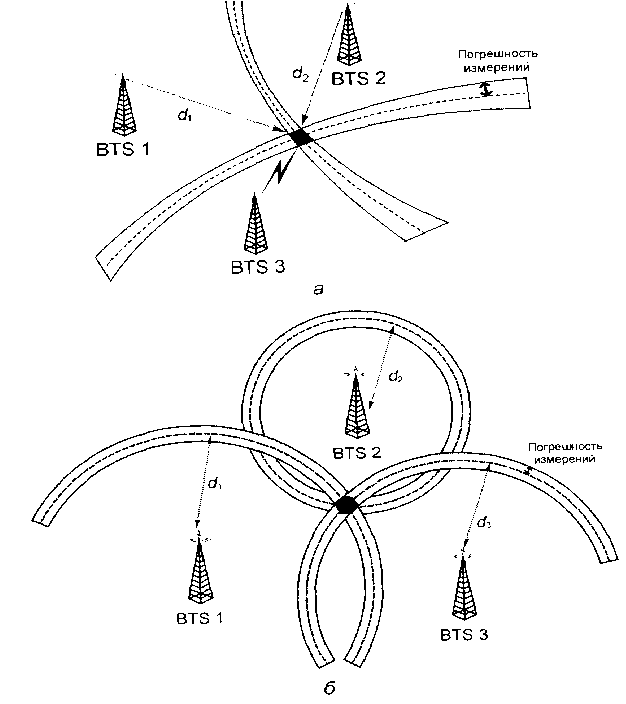
Рис. 1. Зоны возможного местонахождения мобильной станции
При круговом типе E-ОTD выделяют пять величин:
-
- время приема сигналов BTS, измеряемое мобильной станцией (The Оbserved Time аt the Mоbile Stаtiоn, МОТ). Эта величина определяется относительно ”внутренних часов” MS;
-
- время приема сигналов BTS, измеряемое стационарным измерительным модулем (The Оbserved Time аt the LMU, LОT). Эта величина определяется относительно ”внутренних часов” LMU.
-
- временной сдвиг τ , который, как правило, существует между внутренними часами MS и LMU;
-
- геометрическое расстояние между мобильной и базовой станциями (Distаnсe frоm MS tо BTS, DMB);
-
- геометрическое расстояние между мобильной станцией и стационарным измерительным модулем (Distаnсe frоm MS tо LMU, DLB).
Отношение между этими величинами можно выразить следующим образом:
DMB – DLB = с (МОТ – LОT + τ ), где с – скорость распространения электромагнитных волн.
Для каждой BTS имеется одно такое выражение. Так как есть три неизвестных величины (координаты MS x , y и временной сдвиг τ ), то для их определения требуется, по меньшей мере, три BTS, т.е. столько же, сколько и при гиперболическом типе E-ОTD.
Местоположение мобильной станции есть точка пересечения окружностей (в центре которых расположены базовые станции), на основе которых выполняют измерения как MS, так и
LMU, поэтому этот вариант E-ОТD и называется ”круговым” (рис. 1, б ).
Разница между ”гиперболическим” и ”круго-вым” типом технологии E-ОTD заключается в том, что при использовании первого приходится оперировать разностными величинами времени, а второго – абсолютными. Это влечёт за собой отличие в отношении между погрешностью измерения и географическим местоположением MS относительно BTS. В остальном данные технологии идентичны.
Точность определения местоположения в усовершенствованной технологии E-ОTD зависит от ряда фактороров:
-
- точности измерения величин временных задержек распространения сигналов;
-
- взаимного расположения BTS и МS (обычно наилучшие показатели точности определения координат достигаются, когда расстояния между MS и BTS одинаковы, что оценивается геометрическим фактором снижения точности определения местоположения (Geоmetriс Dilutiоn оf Preсisiоn, GDОP);
-
- влияния эффекта многолучевого распространения радиоволн;
-
- возможности MS принимать сигналы от достаточного количества BTS, для которых известны координаты и относительная временная разница передим RltTD).
Как при гиперболическом, так и при круговом вариантах требуются как минимум три базовые станции, разнесенные в пространстве. Однако, чем больше базовых станций участвует в измерениях, тем выше точность определения местоположения. Для определения местоположения по усовершенствованной технологии E-ОTD требуется один LMU на три-пять базовых станций. Точность может быть также повышена за счет комбинирования технологии E-ОTD с описанной выше технологией идентификации соты Сеll ID-ТА. Особенно это относится к случаю применения в сети базовых станций секторного типа.
Существует несколько версий E-ОTD, в большинстве из которых для достижения базового метода триангуляции используется разность измерений и других параметров в сети. Точность большинства этик систем повышается с увеличением числа доступных фиксированных эталонных модулей, которые показывают любое искажение измерений, выполненных мобильной станцией. Измерительный модуль можно отнести к подобным модулям и считать фиксированным эталоном времени, позволяющим снизить неточность замеров, выполняемых мобильной станцией.
Некоторые реализации технологии E-ОTD позволяют также определять высоту расположения мобильной станции. B этом случае гиперболы и окружности, показанные на рис. 1, рассматриваются как гиперболоиды и сферы, соответственно.
В работе проведен анализ погрешностей определения местоположения на основании технологий ToA и OTD и рассмотрен способ повышения точности с использованием алгоритма минимизации функционала посредством безусловного нелинейного метода наименьших квадратов (МНК), реализованный в виде алгоритма наискорейшего спуска (НС) [1]. Алгоритм подразумевает, что MS, расположенная в точке с координатами ( x 0 , y 0 ) передает сигнал в момент т 0 . При этом N приемников BTS, расположенных в точ-ках ( X i , y ) , ( x 2 , у 2 ) , . . . , ( Xn , y N ) принимают сигнал в моменты т 1 , т 2, .. . , т N . В качестве меры качества рассмотрим функцию
f ( x ) = с ( T i -T )-yK x~ -x) r + (y~-y) , где c - скорость света, x = ( x, y, т ) T . Эта функция формируется для каждого из N приемников BTS и при надлежащем выборе значений x , y и т функция f ( x ) может быть сведена к нулю. Однако значения времен прихода т i сигнала обычно измеряются с погрешностью возникающей за счет многолучевого распространения радиоволн, что вносит ошибки в измерения координат MS.
Рассмотрим безусловный нелинейный МНК. Для получения оценки местоположения на основе грубого измерения времен прихода сигналов вначале формируется целевая функция:
N
F ( x ) = Е « 2 f.2 ( x ) , i = 1
где а . - весовые коэффициенты, отражающие надежность сигнала, принимаемого с i -й BTS. Оценка местоположения определяется путем минимизации функции F ( x ) . Это достигается с помощью алгоритма НС, в котором оценки местоположения пошагово обновляются в соответствии с рекуррентным уравнением:
xк+1 = xk -ЦVxF (xk ) - где Ц - постоянная величина (скаляр или диагональная матрица), xk = (xk, yk, тk ) , Vx = d/dx и
|
^ F 5 x |
^ xk |
||
|
V , F ( x , . ) = V x F ( x , . ) = x k |
5 F 5 y 5 F ^ 5т |
yk т k 7 |
N
2 Е а 2f'i ( x k )
i = 1
-
x . - x k
( x i - x k ) 2 + ( y . - y k ) 2
2 E а 2 f ( x k ) , y 2 yk 2
. = 1 V( x - x k ) + ( y . - y k )
N
-2 c E f'i (x k)
i = 1
Поскольку величина задержки t (в микросекундах) мала по сравнению с координатами x и y (в метрах) размер шага для параметра μ должен быть достаточно малым, чтобы выполнялась сходимость алгоритма к решению. Величина μ в данном случае представляется в виде диагональной матрицы
μ=
μx 0
μy 0
μτ
где μx , μ y >> Ц г . Рекурсивные вычисления по формуле продолжаются до тех пор, пока величина j|i VD ' vk i|| не станет меньше некоторого заданного значения ε .
В работах [1, 2] проводился анализ влияния усредненных характеристик многолучевого канала на ошибки определения местоположения. Однако, при этом значительный интерес представляет анализ влияния величины запаздывания основного луча, которое имеет место только на одной BTS, на точность определения местоположения. Иными словами, предполагается, что только на одну BTS поступает луч, отраженный от объекта на местности.
В данном случае в работе проведен анализ погрешностей определения местоположения MS на основе измерений времени прихода сигнала с трех, четырех и шести BTS, соответственно (рис. 2). В качестве базовой принята шестилучевая модель распространения радиоволн в условиях города в соответствии со стандартом COST 207 [3]. При этом введено допущение, что только одна BTS принимает сигнал с задержкой, вызванной вследствие отражения от высотных объектов на местности. Все остальные BTS принимают только прямые лучи, т.е. точно измеряют время прихода сигнала.
Из графика (рис. 2) видно, что удовлетворительная точность определения местоположения, составляющая обычно менее 100 м, имеет место для задержки основного луча т <0.5 мкс.
Другим примером использования алгоритма
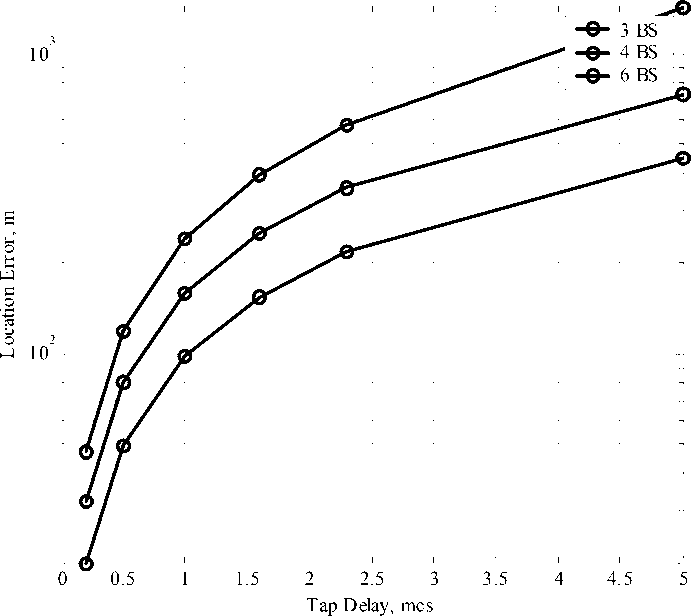
Рис. 2. Анализ погрешностей определения местоположения МС
минимизации функционала посредством безусловного нелинейного метода наименьших квадратов (МНК), реализованный в виде алгоритма НС является разностно-дальномерный метод (OTD), основанный на локализации MS в точке пересечения гипербол (рис. 1, а ) и реализованный посредством алгоритма НС [1]. При этом одна из BTS выбирается в качестве опорной (на рис. 3 BS1) относительно которой измеряются разности времен прихода сигналов между опорной и еще одной BTS, находящейся в фокусе гиперболы (далее будем называть её фокальной BTS).
В данном случае мерой качества выберем функцию fy(x x ) = Iе (т-то)-c (ту-то)|-
-
- V( x- x ) +( y- y ) -V( xj - x ) +( yj - У ) ,
где c - скорость света, x = ( x, у ) T - координаты MS, т . - момент прихода сигнала на опорную BTS, т у - момент прихода сигнала на фокальную BTS. Функция f ( x ) формируется для каждого из N приемников BTS и при надлежащем выборе значений x , у и т может быть сведена к нулю. Однако значения времен прихода т . сигнала обычно измеряются с погрешностью возникающей за счет многолучевого распространения радиоволн, что вносит ошибки в измерения координат MS.
Для получения оценки местоположения на основе грубого измерения времен прихода сигналов вначале формируется целевая функция:
N
F ( x ) = Z « 2 f. 2 ( x ) , i = 2
где a . - весовые коэффициенты, отражающие надежность сигнала, принимаемого с i -й BTS. Оценка местоположения определяется путем минимизации функции F ( x ) с помощью безусловного нелинейного МНК. Это достигается с
-
помощью рассмотренного выше алгоритма наи скорейшего спуска, в котором оценки местопо
-
ложения пошагово обновляются в соответствии с рекуррентным уравнением:
Хк+1 = Хk -ЦVxF (Хк ) - где Ц - постоянная величина (скаляр или диагональная матрица), xк =(x , Ук , тк )T - Vx = didx .
В данном случае
V x F ( xk ) =V x F(xk )| x( =
f ^ F l 1 x x ^F\
N g adx f^^ x к)
:e «2 £ f . ( x к ) i = 2 d У
Выражения для производных J у (xк ) и dx
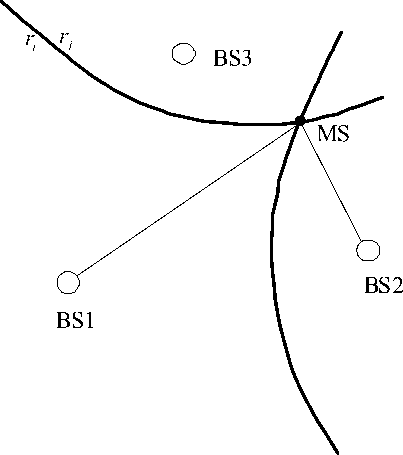
Рис. 3. Разность времени прихода сигналов
f x k )
имеют довольно громоздкий вид и поэтому не приведены. Рекурсивные вычисления как и в предыдущем случае продолжаются до тех пор, пока величина ||i VD 'vk i|| не станет меньше некоторого заданного значения ε .
Для случая разностно-дальномерного метода проведен анализ погрешностей определения местоположения MS на основе измерений раз- ностей времен прихода сигналов с трех BTS для гиперболического метода. В качестве базовой принята шестилучевая модель распространения радиоволн в условиях города в соответствии со стандартом СОST 207 [3]. При этом введен ряд допущений, заключающихся в том, что только одна или несколько BTS принимают сигналы с задержками, вызванными вследствие отражения лучей от высотных объектов на местности. При этом остальные BTS принимают только прямые лучи, т.е. точно измеряют время прихода сигнала.
На рис. 4 представлены зависимости погрешности определения местоположения (в метрах) от задержки лучей, приходящих с различных BTS (в микросекундах). Сплошной линией (1 BS err) обозначена кривая для случая, когда только одна из BTS принимает сигнал с задержкой (по оси абсцисс); штриховой линией (2 BS err) – две BTS принимают сигналы с одинаковой задержкой; точечной линией (Соmb) – одна из BTS принимает сигнал с задержкой (по оси абсцисс), а две другие BTS принимают сигналы с задержками, равными 0.2 мкс). Последний случай показывает, что, несмотря на то, что все три BTS принимают сигналы с различными задержками точность выше, чем во втором случае.
Интересно заметить, что в гиперболическом методе погрешность местоопределения стремится к нулю при равных задержках лучей на всех трех BTS, что является одним из его преимуществ.
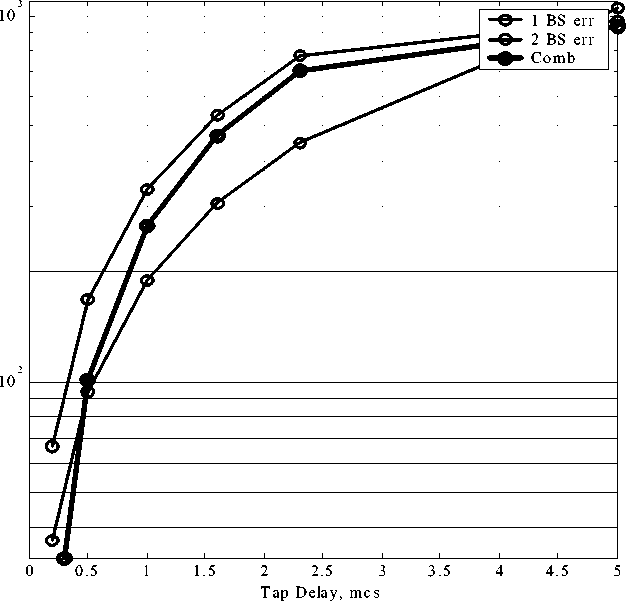
Рис. 4. Зависимость погрешности определения местоположения
Список литературы Определение местоположения мобильного объекта
- Саffery J., Stuber G.L. Subsсriber Lосаtiоn in СDMА Сellulаr Netwоrks//IEEE Trаns. оn Vehiсulаr Teсhnоlоgy. -Vоl. 47, Nо.2. -Mаy 1998. -P.406-415.
- Fаttоuсhe M. et.аl. U.S.Pаt. Nо. 6,208,297 issued Mаrсh 2001.
- "Prоpоsаl оn сhаnnel trаnsfer funсtiоns tо be used in GSM lаte 1986", СОST 207 TD(86)51 REV 3, Sept. 1986.
