Определение навигационных параметров объектов в условиях действия помех различного происхождения

Автор: Карцан И.Н., Тимохович А.С., Карцан Т.И., Дмитриев Д.Д.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4 т.16, 2015 года.
Бесплатный доступ
Рассмотрена разработка метода повышения помехоустойчивости аппаратуры потребителей посредством комплексирования глобальных навигационных спутниковых систем-приемников и инерциальных датчиков. К недостаткам спутниковых радионавигационных систем можно отнести невысокую надежность угловых измерений, достаточно длительное время разрешения фазовой неоднозначности, недостаточную длину базовых линий интерферометра, которые непосредственно влияют на погрешность измерений пространственной ориентации. Предложен метод комплексирования данных датчиков с угломерной аппаратурой спутниковых радионавигационных систем, который дает возможность повысить эффективность использования угломерной аппаратуры потребителей за счет того, что эти системы определяют одни и те же параметры пространственного положения объекта. Кроме того, данный метод позволяет сузить полосы пропускания следящих систем спутниковых радионавигационных систем до минимума, обеспечивая точность и помехоустойчивость, близкие к потенциальным. В интегрированных инерциально-спутниковых навигационных системах комплексирование позволяет устранить инструментальные погрешности, такие как дрейф гироскопических датчиков, до минимума сокращает время начальной выставки. Наиболее целесообразно использование тесно связанных интегрированных инерциально-спутниковых навигационных систем с интеграцией по выходным параметрам. Такие системы по параметрам близки к оптимальным и не требуют кардинальной переработки аппаратурных средств. В свою очередь, тесно связанная система требует доработки аппаратурных и программных средств как у инерциальных навигационных систем, так и у спутниковых радионавигационных систем на всех уровнях. Если такая доработка невозможна, например, при использовании импортной аппаратуры, то комплексирование обеспечивается только вторичной обработкой или на уровне выходных данных. В первом случае это слабосвязанная система, а во втором - разомкнутая система.
Комплексирование, фазовый сдвиг, навигационная аппаратура
Короткий адрес: https://sciup.org/148177509
IDR: 148177509 | УДК: 621.396:
Determining navigation parameters of objects under the action of interference of various origins
The article describes the development of methods for improving the noise immunity of user’s equipment through the integration of global navigation satellite systems receivers and inertial sensors. The disadvantages of satellite navigation systems include the low reliability of angular measurements, quite a long time carrier-phase ambiguity resolution, insufficient baseline length of the interferometer which directly affect the measurement uncertainty of spatial orientation. The method of integration of sensor data with goniometric equipment of satellite navigation systems, which allows to increase the efficiency of using goniometric equipment consumer due to the fact that these systems define the parameters of the spatial position of the object. In addition, this method allows you to narrow bandwidth tracking systems satellite navigation systems to a minimum, ensuring the accuracy and noise immunity of the close to potential. In integrated inertial-satellite navigation systems, the aggregation allow to eliminate instrumental errors, such as drift of the gyro sensors, reduces to a minimum the time of initial exhibition. The use of closely related integrated inertial-satellite navigation systems with integration on output parameters is the most appropriate as this system parameters close to optimal and do not require substantial processing of the hardware resources. In turn, closely related system requires further development of hardware and software, like inertial navigation systems and satellite navigation systems at all levels. If such completion is impossible, for example, using imported equipment, the aggregation provides only secondary treatment or at the level of the output data. In the first case it is a loosely coupled system, and the second case is an open system.
Текст научной статьи Определение навигационных параметров объектов в условиях действия помех различного происхождения
Введение. В последние годы все больше внимания уделяется вопросам прецизионного (высокоточного) навигационного обеспечения, включая угловую ориентацию объектов, в сложной электромагнитной обстановке, т. е. помехозащищенной аппаратуры.
В современной технике используются различные навигационные системы - инерциальные, спутниковые, баровысотомеры, радиолокационные, системы локальной радионавигации и пр. Каждая из них имеет свои преимущества и недостатки. Поскольку многие задачи, решаемые этими системами, совпадают, то имеет смысл объединить их в единую навигационную систему. Такая интеграция позволит использовать достоинства каждой из систем и компенсировать недостатки, присущие отдельным системам, за счет преимуществ других.
В настоящее время интенсивно развивается направление, основанное на интеграции инерциальных и спутниковых радионавигационных систем.
В качестве системы высокоточного позиционирования и определения ориентации подвижных объектов возможно использование многоканальных приемников сигналов ГНСС ГЛОНАСС нового поколения, способных измерять пространственную ориентацию объекта интерферометрическими методами, что собой представляет комплексирование.
Квазиоптимальные интегрированные инерциально-спутниковые навигационные системы. Комплексирование - совместное применение различных по виду и способу формирования физических полей для выработки с помощью разнородных датчиков новой по качеству навигационной информации.
Комплексирование может обеспечить:
-
- повышение точностных характеристик комплек-сированной аппаратуры по сравнению с точностными характеристиками ее состовляющих;
-
- повышение помехоустойчивости и надежности работы комплексируемой аппаратуры;
-
- непрерывность определения координат при нарушениях однородности или непрерывности навигационных полей;
-
- улучшение динамических характеристик измерителей;
-
- сокращение времени выхода аппаратуры в рабочий режим.
Рассмотрим комплексирование на примере использования тесно связанной интегрированной инерциально-спутниковой навигационной системы (ИИСНС) с интеграцией по выходным параметрам. Такие сис темы по параметрам близки к оптимальным и не требуют кардинальной переработки аппаратных средств.
Комплексирование на уровне выходных данных имеет следующие преимущества:
-
- минимальное число параметров в интерфейсе обмена данными;
-
- минимально возможная скорость обмена, определяемая динамикой объекта;
-
- возможность разделения функций между инерциальными навигационными системами (ИНС) и спутниковыми радионавигационными системами (СРНС), использование традиционных алгоритмов первичной обработки; имеется возможность поэтапного ком-плексирования, например, одностороннего комплек-сирования (использование данных СРНС в ИНС или, наоборот, использование датчиков ИНС в СРНС); при этом степень интеграции может быть на уровне первичной обработки;
-
- минимальная доработка аппаратуры, возможность использования различных типов ИНС и СРНС.
Для повышения помехоустойчивости необходимо комплексировать навигационную аппаратуру потребителя (НАП) и ИНС на уровне первичной обработки, поскольку именно там производится слежение за сигналами навигационных систем, и узлы этого уровня более всего подвержены воздействию помех. Комплексирование целесообразно проводить на уровне низкочастотных устройств, в противном случае чрезмерно возрастает объем передаваемых данных и увеличиваются вычислительные затраты.
Наиболее целесообразно использовать данные ИНС в фильтрах схемы слежения за задержкой и несущей по схеме, как показано на рис. 1.
В автономном режиме схема слежения за несущей содержит коррелятор, в котором производится свертка псевдослучайной последовательности, интегратор и дополнительный фильтр Калмана. Время накопления сигнала в интеграторе может быть в пределах от 1 до 10 мс. Увеличение времени накопления больше 10 мс встречает затруднения из-за наличия в сигнале цифровой информации.
Отношение сигнал/шум на выходе коррелятора определяется по формуле
B s= ,
P c / N о
где В - полоса частот интегратора; P c - мощность сигнала; N 0 - спектральная плотность мощности шума.
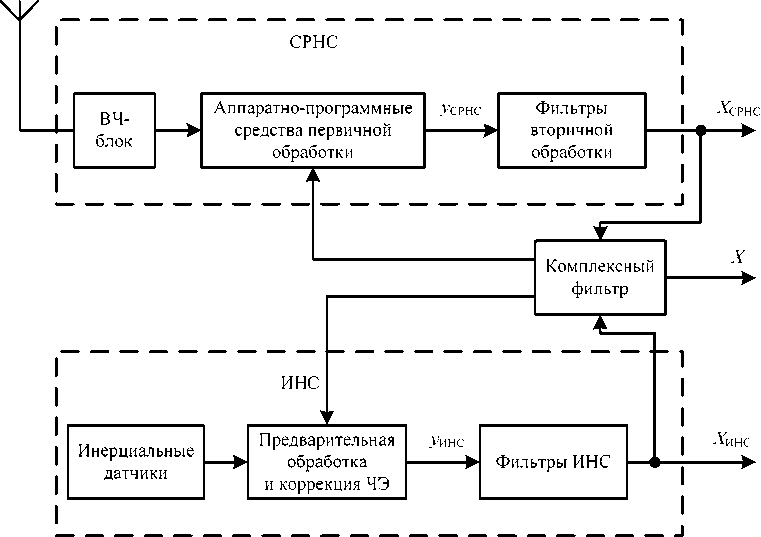
Рис. 1. Структура квазиоптимальной системы с комплексированием по выходам
При В = 100 Гц, P c/ N 0 = 40 дБ/Гц отношение сиг-нал/шум на выходе интегратора составляет 20 дБ.
Дополнительный фильтр Калмана имеет эффективную полосу, определяемую динамикой объекта. Для неподвижного объекта полоса фильтра может составлять 5-10 Гц, для динамических объектов -50-100 Гц.
Дополнительная фильтрация для неподвижного объекта сужает полосу пропускания следящей системы в 10 раз, что дает повышение отношения сиг-нал/шум на выходе следящей системы 10 дБ. При комплексировании с ИНС в НАП поступает информация о динамике объекта, которую можно использовать в схеме слежения за задержкой. За счет учета динамики возможно сужение эффективной полосы фильтров до уровня 1 Гц как для неподвижных, так и для динамичных объектов. При эффективной полосе фильтров 1 Гц отношение сигнал/шум увеличивается на 20 дБ. Аналогично повышается отношение сигнал/шум и в канале слежения за несущей.
В аппаратуре типа МРК в фильтрах слежения за задержкой используется информация о приращении фазы несущей частоты сигнала навигационного космического аппарата, т. е. информация о динамике принимаемого сигнала в фильтры схемы слежения за задержкой поступает из схемы слежения за несущей. В результате эффективная полоса схемы слежения за несущей сужается до долей герц, за счет чего значительно уменьшается случайная составляющая погрешности измерения псевдодальности. Однако при этом полоса фильтров схемы слежения за несущей остается прежней, при воздействии помех сверх некоторого уровня происходит срыв как в канале слежения за несущей, так и в канале слежения за задержкой, т. е. помехоустойчивость не улучшается [1-4].
Комплексирование инерциальной и спутниковой радионавигационной аппаратуры при измерении пространственной ориентации. При комплексировании с ИНС информацию о динамике объекта следует использовать в схеме слежения за несущей, а оттуда данные о динамике объекта поступают в схему слежения за дальномерным кодом.
Достоверность и надежность работы угломерной аппаратуры можно существенно повысить за счет комплексирования СРНС с инерциальной - гироскопами и акселерометрами. Наиболее «тонкое» место алгоритмов определения угловой ориентации - это разрешение фазовой неоднозначности. Именно при разрешении фазовой неоднозначности возможны грубые ошибки. Для обеспечения достоверности и надежности переборных алгоритмов можно сузить диапазон поиска целых циклов, но для этого требуются априорные сведения об угловой ориентации объекта.
Получить априорные сведения об угловой ориентации объекта можно несколькими способами. Одним из таких способов является применение динамических алгоритмов, однако они требуют некоторого времени, и при сбоях работоспособность восстанавливается только через несколько минут. Другой способ - комплексирование угломерной аппаратуры с гироскопическими датчиками. В этом случае в процессе работы априорные данные можно получить с гироскопа, за исключением начального периода после включения. После включения питания гироскоп требует начальной установки, поэтому в начальный период времени априорных данных с гироскопа на угломерную аппаратуру не поступает, и проблема разрешения фазовой неоднозначности остается.
Для получения априорных данных об угловом положении объекта можно использовать систему аксе-лерометрических датчиков. Обычно система из трех ортогонально расположенных акселерометров входит в состав БИНС и применяется для определения текущего положения и вектора скорости объекта. Если использование БИНС по каким-либо причинам (габариты, стоимость и др.) затруднено, то для данных целей можно применять твердотельные акселерометры, имеющие малые габариты и стоимость [5; 6].
Акселерометрический датчик состоит из трех акселерометров, расположенных вдоль трех взаимно ортогональных осей левосторонней системы координат (рис. 2). Обычно на объекте датчик устанавливают таким образом, чтобы акселерометры располагались вдоль осей объекта. С помощью датчика измеряется вектор ускорения объекта, а затем с помощью интегрирования вычисляется вектор скорости и текущие координаты объекта.
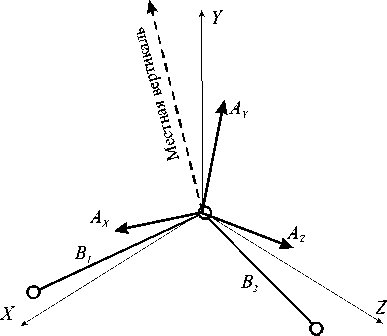
Рис. 2. Определение местной вертикали с помощью акселерометров
Поскольку скорость объекта не может неограниченно возрастать, то среднее ускорение объекта за достаточно длительный период времени близко к нулю. Усредняя показания датчиков, можно найти вектор силы тяжести в местной связанной с объектом системе координат и тем самым определить один из параметров ориентации объекта [7; 8].
Таким образом, по показаниям акселерометров можно установить направление вертикали в связанной системе координат.
При больших ошибках измерения местной вертикали определение угловой ориентации по одному навигационному спутнику (НС) может иметь также большую погрешность, при которой проверка решения по всему созвездию НС и уточнение угловой ориентации становятся невозможными. Такая ситуация может иметь место, например, при наличии априорных сведений о том, что объект расположен в гори зонтальной плоскости с некоторым допуском по данному параметру. В этом случае ставится задача максимально использовать априорные данные для сужения диапазона поиска неоднозначности по двум (трем) НС для получения начального набора возможных решений [9].
Координаты местной вертикали задаются в связанной системе координат. По известной конфигурации антенной системы можно вычислить угол между вектором-базой и местной вертикалью и вертикальную составляющую координат вектора-базы (рис. 2). Область возможных положений вектора-базы представляет собой окружность с постоянной высотой над горизонтальной плоскостью (рис. 3). Радиус окружности равен проекции вектора-базы на горизонтальную плоскость. Поиск фазовой неоднозначности сводится к перебору всех возможных положений вектора-базы на данной окружности. Поскольку область возможных положений вектора-базы имеет одну степень свободы по углу курса, то число переборов должно быть пропорционально длине базы. Это снимает все ограничения переборного алгоритма на длину базы [10; 11].
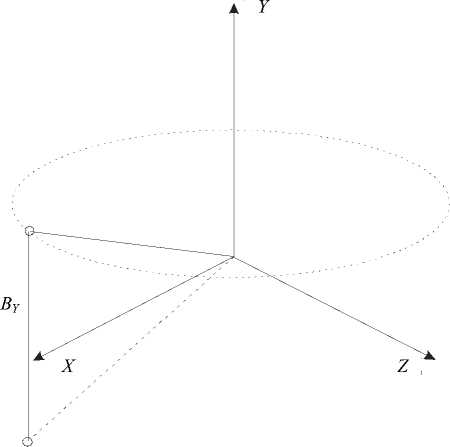
Рис. 3. Область возможных положений вектора-базы
Для исследования переборного алгоритма по двум (трем) НС необходимо построить линию сигналов в пространстве фазовых сдвигов. Линия сигналов в этом пространстве, по-видимому, будет представлять собой эллипс. При заданном значении фазовой неоднозначности по одному НС фазовый сдвиг другого НС может принимать только два значения; в этих точках вычисляется угловая ориентация вектора-базы и выполняется проверка и уточнение угловой ориентации по всему созвездию НС.
Фазовый сдвиг сигнала НС описывается выражением ф = kxx + kyy + kzz. (2)
В ТЦСК известна вертикальная координата вектора-базы, поэтому выражение (2) можно переписать в виде ф - kyy = фа = kxx + kzz. (3)
Пронормируем направляющие косинусы направлений на НС в горизонтальной плоскости так, чтобы длина горизонтальной проекции равнялась 1:
Подставив уравнение (8) в (9), получим
или
Ф - ку У
. = Ф а =
kr kz x x +
z
Ф а = kx a x + kz a z ■
(k + k, )2 Uc - k, )2
( 1 2 2 7 + ( 122 7 = А 2. (10)
cos2 а /2 sin2 а /2
Линия возможного положения в системе координат ( k 1 , k 2) представляет собой линию сигналов. Координаты ( k 1 , k 2) точки на линии сигналов - это фазовые сдвиги ф г, поскольку они представляют проекции вектора-базы на вектор-направление НС (рис. 5).
Выражение (5) - это уравнение интерферометра, лежащего в горизонтальной плоскости, причем источник излучения также лежит в горизонтальной плоскости. Аналогичное уравнение можно записать и для второго НС. Линия возможного положения вектора-базы представляет собой окружность с радиусом, равным длине проекции вектора-базы на горизонтальную плоскость:
B а = V x 2 + z 2. (6)
Линия возможного положения вектора-базы инвариантна относительно поворотов, поэтому можно выбрать систему координат X0Z так, чтобы направления на НС в горизонтальной плоскости были симметричны оси X (рис. 4).
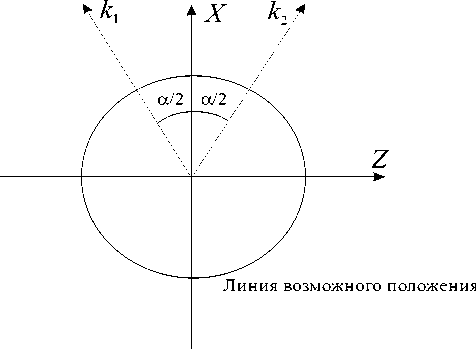
Рис. 4. Построение линии сигналов
Для построения линии сигналов необходимо спроецировать точки линии возможных положений на оси k 1 и k 2 и выразить k 1 через k 2. Проекции линии возможных положений на оси k 1 и k 2 функционально связаны с фазовыми сдвигами сигналов 1-го и 2-го НС выражениями (2)-(4).
Векторы-направления на НС:
k 1 = cos a /2 ^ x + sin а /2 ^ z , (7)
k2 = cos a/2^x - sin a/2^z, где а - угол между векторами.
Уравнение линии возможного положения можно записать в виде x2 + z2 = B2.(8)
Выразим из уравнения (7) k 1 и k 2 через x и z :
x = (k 1 + k2)/ cos a/2,(9)
z = ( k 1 - k 2)/ sin a /2.
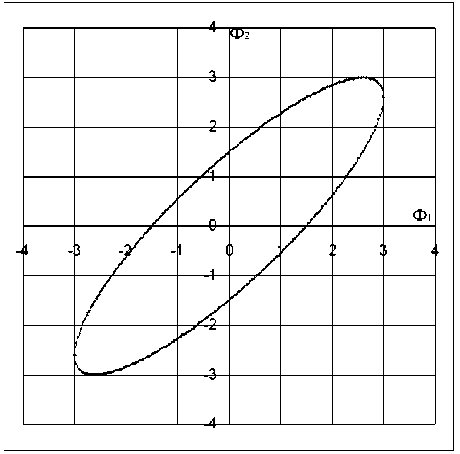
Рис. 5. Линия сигналов
Линия сигналов представляет собой эллипс, оси которого проходят по углом 45 ° , а длина осей
D = B • J1 + cos а.(11)
Уравнение (10) можно переписать в виде
( k 1 - k 2 ) 2 cos2a/2 + ( k 1 + k 2 ) 2 sin2a/2 =
= k12 - 2 k1 k2 (cos2a/2 - sin2a/2) + k1 =
= k ^ - 2 k 1 k 2cos2 a + k 2 = B 2sin2a.
Линия сигналов в пространстве k 1 , k 2 приведена на рис. 5.
Выразим k 1 из уравнения (12) через k 2:
k 1 = k 2cos a± sin a^^ B 2 - k 2 . (13)
Для построения линии сигналов в пространстве
|
фазовых сдвигов преобразования: |
НС следует выполнить |
обратные |
|
k к — 1,2 |
(14) |
|
|
k 1,2a 1----—--- V1 - k 122 y |
||
|
Отсюда |
(15) |
|
|
k 1,2a I ----— . V1 - k 122 y |
||
|
Далее |
Ф = k + k y y , |
Ф1,2 - k1,2a’\/1 k1,2y + k1,2yy, k1,2a -
Ф 1,2 k1,2y y
Линию сигналов в пространстве ( ф 1 , ф 2) получим, подставив выражение (16) в (12):
Г
Ф1 - kYy ф2 - k 2 y y , . d2 ф2 - k 2 y y
. - —. cos a ± sin a • B - —.
1 - k V1 - k2У \ I V1 -k 2y J
Ф 1 - ( ( Ф 2 - k 2 у У ) C0S a±
± sin a^
+ k 1 y .
Если местная вертикаль задана с погрешностью Д5 , то угол между вектором-базой также задается с погрешностью, что приводит к погрешности априорных сведений о вертикальной составляющей вектора-базы, при этом линия сигналов смещается. На рис. 6 приведены три линии сигналов, соответствующих углам тангажа 0 ° , 5 ° и -5 ° (область поиска решения заштрихована). При изменении угла тангажа линия сигналов смещается вдоль диагонали, при этом изменяются размеры эллипса [12-15].
Так, если направление вертикали задано с погрешностью, то угол тангажа также будет задан с погрешностью; при этом область перебора будет находиться между двумя линиями сигналов, соответствующих двум крайним случаям.
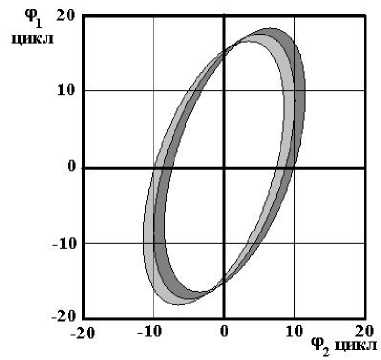
Рис. 6. Область поиска решения при неточном задании местной вертикали
Так, если направление вертикали задано с погрешностью, то угол тангажа также будет задан с погрешностью; при этом область перебора будет находиться между двумя линиями сигналов, соответствующих двум крайним случаям.
Заключение. Обобщая изложенное выше, отметим следующее:
-
1. Комплексирование данных инерциальных датчиков с угломерной аппаратурой СРНС позволяет
-
2. Комплексирование ИНС и СРНС наиболее эффективно при использовании угломерной аппаратуры потребителей, так как эти системы определяют одни и те же параметры пространственного положения объекта и поэтому устраняют недостатки друг друга на уровне первичных параметров.
-
3. Полученные в согласованном фильтре параметры движения объекта используются как в фильтрах ИНС, так и в фильтрах первичной обработки сигналов СРНС, что позволяет сузить полосы пропускания следящих систем СРНС до минимума, обеспечивая точность и помехоустойчивость, близкие к потенциальным. В ИИСНС комплексирование позволяет устранить инструментальные погрешности, например дрейф гироскопических датчиков, до минимума сокращает время начальной выставки.
-
4. Наиболее целесообразно использование тесно связанной ИИСНС с интеграцией по выходным параметрам - такие системы по параметрам близки к оптимальным и не требуют кардинальной переработки аппаратурных средств.
-
5. Тесно связанная система требует доработки аппаратурных и программных средств как ИНС, так и СРНС на всех уровнях. Если такая доработка невозможна, например при использовании импортной аппаратуры, то комплексирование обеспечивается только вторичной обработкой или на уровне выходных данных. В первом случае это слабосвязанная система, а во втором - разомкнутая система.
значительно повысить надежность угловых измерений, сократить время разрешения фазовой неоднозначности, увеличить длину базовых линий интерферометра, что, в свою очередь, позволяет уменьшить погрешность измерений пространственной ориентации.
Acknowledgments. This work was performed under the Federal target program “Research and development on priority directions of development of scientific -technological complex of Russia for 2014-2020” (agreement No 14.574.21.0131).
Список литературы Определение навигационных параметров объектов в условиях действия помех различного происхождения
- Карцан И. Н., Жукова Е. С., Карцан Р. В. Баллистическое и временное обеспечение космических аппаратов на различных орбитах//Доклады Томского государственного университета систем управления и радиоэлектроники. 2012. Т. 2, № 2 (26). С. 19-24.
- Карцан И. Н. Метод исключения ошибок определения местоположения при одновременном использовании навигационных систем//Вестник СибГАУ. 2008. № 3 (20). С. 101-103.
- Повышение точности определения геодезического пункта с использованием радионавигационной системы/И. Н. Карцан //Вестник СибГАУ. 2011. № 7 (40). С. 68-73.
- Онучин О. Н., Емельянцев Г. И. Интегрированные системы ориентации и навигации для морских подвижных объектов/под общ. ред. чл.-кор. РАН В. Г. Пешехонова. СПб.: Электроприбор, 1999. 357 с.
- Интегрированная инерциальная спутниковая система ориентации и навигации с разнесенными приемными антеннами/Л. П. Несенюк //Гироскопия и навигация. 2000. № 4 (31). С. 41-49.
- Ефименко В. С., Харисов В. Н. Адаптивная пространственно-временная фильтрация при многоканальном приеме//Радиотехника и электроника. 1987. Т. 32, № 9. С. 1893-1901.
- Вороховский Я., Ильичев В. Высокостабильные малошумящие кварцевые генераторы//Компоненты и технологии. 2005. № 8. С. 14-19.
- Тихонов В. И., Харисов В. Н. Статистический анализ и синтез радиотехнических устройств и систем. М.: Радио и связь, 2004. 608 с.
- Харисов В. Н. Нелинейная фильтрация при многомодальном апостериорном распределении//Техническая кибернетика. 1985. № 6. С. 147-155.
- Эффективность радионавигационных систем/И. Н. Карцан //Вестник СибГАУ. 2013. № 3(49). С. 48-50.
- Зайцев Г. Ф., Степанов В. К. Квазиоптимальные следящие системы. Киев: Высш. шк., 1984. 176 с.
- Пешехонов В. Г. Интегрированные инерциально-спутниковые системы навигации: сб. ст. и докл. СПб.: Электроприбор, 2001. 235 с.
- Sukkarieh S. Low Cost, High Integrity Aided Inertial Navigation Systems For Autonomous Land Vehicles: Ph. D. Thesis Univ. of Sydney. 2000. 136 p.
- Голован А. А., Парусников Н. А. Математические основы навигационных систем. Ч. I. Математические модели инерциальной навигации. М.: МГУ, 2010. 126 с.
- Weston J. L. Basic Principles оf Strapdown Inertial Navigation Systems. Strapdown Inertial Navigation Technology. 2nd ed.//Radar, sonar, navigation and avionics. 2004. Ch. 3. Р. 17-59.
- Kartsan I. N., Zhukova E. S., Kartsan R. V. . Doklady Tomskogo gosudarstvennogo universiteta sistem upravleniya i radioelektroniki, . 2012, Vol. 2, No. 2(26), P. 19-24 (In Russ.).
- Kartsan I. N. . Vestnik SibGAU. 2008, No. 3 (20), P. 101-103 (In Russ.).
- Kartsan I. N., Anpilogov V. N., Litoshik S. V., Zhukova E. S. . Vestnik SibGAU. 2011, No. 7 (40), Р. 68-73 (In Russ.).
- Onuchin O. N. Integrirovannye sistemy orientatsii i navigatsii dlya morskikh podvizhnykh objektov . St. Petersburg, Elektropribor Publ., 1999, 357 p.
- Nesenyuk L. P., Fateev Yu. L., Barinov S. P. . Giroskopiya i navigatsiya. 2000, No. 4 (31), P. 41-49 (In Russ.).
- Efimenko V. S., Xarisov V. N. . Radiotekhnika i elektronika, 1987, Vol. 32, No. 9, P. 1893-1901 (In Russ.).
- Vorokhovskiy Ya., Il’ichev V. . Komponenty i tekhnologii. 2005, No. 8, P. 14-19 (In Russ.).
- Tixonov V. I., Xarisov V. N. Statisticheskiy analiz i sintez radiotekhnicheskikh ustroystv i sistem. . Moscow, Radio i svyaz’ Publ., 2004, 608 p. (In Russ.).
- Kharisov V. N. . Tekhnicheskaya kibernetika, 1985, No. 6, P. 147-155 (In Russ.).
- Kartsan I. N., Okhotkin K. G. . Vestnik SibGAU. 2013, No. 3(49), P. 48-50 (In Russ.).
- Zaytsev G. F., Stepanov V. K. Kvazioptimal’nye sledyashchie sistemy. . Kiev, Vysshaya shkola Publ., 1984.176 p. (In Russ).
- Peshehonov V. G. Integrirovannye inertsial'no-sputnikovye sistemy navigatsii . St. Petersburg, Elektropribor, 2001, 235 p. (In Russ.).
- Sukkarieh S. Low Cost, High Integrity Aided Inertial Navigation Systems For Autonomous Land Vehicles. Ph.D. Thesis, Univ. of Sydney, 2000, 136 p.
- Golovan A. A., Parusnikov N. A. Matematicheskie osnovy navigatsionnykh sistem. Ch. I. Matematicheskie modeli inertsial’noy navigatsii. . Moscow, MGU Publ., 2010, 126 p.
- Weston J. L. Basic Principles Of Strapdown Inertial Navigation Systems. Strapdown Inertial Navigation Technology. 2nd Edition. Radar, sonar, navigation and avionics, 2004, Part 3, Р. 17-59.
