Определение оптимальных кинематических режимов электропривода включения вала отбора мощности

Автор: Лучинович А.А., Редреев Г.В., Сорокин А.Н., Червенчук В.Д.
Журнал: Вестник Омского государственного аграрного университета @vestnik-omgau
Рубрика: Процессы и машины агроинженерных систем
Статья в выпуске: 4 (36), 2019 года.
Бесплатный доступ
Эффективность использования тракторных агрегатов с активными рабочими органами зависит от функционирования вала отбора мощности трактора. Среди парка колесных тракторов, занятых в растениеводстве, основной объем занимают тракторы производства Минского тракторного завода. В подавляющем большинстве случаев вал отбора мощности представляет планетарный редуктор. Включение вала отбора мощности проводится торможением барабана, соединенного с солнечной шестерней. Торможение осуществляется лентой с фрикционными накладками. Ввиду особенностей конструкции механизма включения торможение барабана происходит неравномерно, приводя к увеличению числа оборотов барабана за время включения. Вследствие этого существенно изнашиваются фрикционные накладки ленты. Так как контроль состояния тормозной ленты не осуществляется, регулярное пробуксовывание барабана включения значительно сокращает срок службы ленты. Для его увеличения и повышения эффективности использования вала отбора мощности предлагается для включения привода применить электромагниты, прижимающие ленту к барабану...
Вал отбора мощности (вом), механизм включения, микропроцессорное устройство, электрический привод
Короткий адрес: https://sciup.org/142223223
IDR: 142223223 | УДК: 62-585.13
Definition of the optimal kinematic modes of the electric drive of the power take-off shaft switching
The efficiency of using tractor units with active working tools depends on the functioning of the tractor power take-off shaft. Among the tractor fleet of wheeled tractors engaged in crop production, the main volume is occupied by tractors produced by the Minsk tractor plant. In the vast majority of cases, the PTO shaft is a planetary reduction gear. The power take-off shaft is activated by braking the drum connected to the solar gear. Braking is carried out by a tape tool with friction pads. Due to the design features of the switching mechanism, the braking of the drum occurs uneven, which leads to an increase in the number of revolutions of the drum during switching on. As a result, the friction linings of the tape tool are significantly worn. Since the condition of the brake tape tool is not monitored, regular slipping of the switching drum significantly reduces the service life of the tape tool. To increase the service life of the brake tape tool and improve the efficiency of the power take-off shaft, it is suggested to use electromagnets, pressing the tape to the drum, to turn on the drive...
Текст научной статьи Определение оптимальных кинематических режимов электропривода включения вала отбора мощности
В отечественном агропромышленном комплексе широко используются агрегаты и машины с активными рабочими органами, механическая энергия к которым подводится через вал отбора мощности (ВОМ). В частности, на тракторах производства Минского тракторного завода такой ВОМ представляет планетарный механизм, солнечная шестерня которого соединена с барабаном включения. При торможении этого барабана планетарный механизм через водило передает крутящий момент на вал рабочего органа. Торможение барабана осуществляется механическим приводом натяжения тормозной ленты; лента прижимается к поверхности барабана и тормозит его.
При эксплуатации такого ВОМ возникают трудности, связанные с быстрым износом фрикционного слоя тормозной ленты, технологией замены ленты на новую. Контроль над состоянием фрикционной ленты и регулирование механизма управления регулировочными винтами из-за конструктивных особенностей ВОМ также затруднены. Поэтому данную регулировку часто проводят несвоевременно, что приводит к быстрому износу фрикционного слоя тормозной ленты.
Устранить эти трудности возможно, если существенно доработать механизм торможения барабана включения ВОМ. Если вместо механического привода прижатия фрикционной ленты к барабану применить электромагнитное устройство, прижимающее ленту к барабану сразу в нескольких точках и не одновременно, а со сдвигом по времени, это улучшит прилегание ленты к барабану включения, а возможность регулирования силы прижатия ленты посредством изменения силы тока в обмотках электромагнитов позволит задать наиболее оптимальный (с точки зрения уменьшения износа фрикционного слоя тормозной ленты) закон изменения этой силы [1–3]. Для исследования аналогичных по назначению тормозных устройств применялись различные динамические модели, описывающие процесс торможения быстровращающихся валов [4].
Материалы и методы
Закон изменения силы прижатия тормозной ленты к барабану включения можно определить по второму закону Ньютона и кривой торможения барабана включения как функции ot)t) от времени t, где СО - угловая скорости вращения барабана [5-6]. В этом случае момент торможения
M тр= J^b^M м =Ғ ТР R ’ Н™,
„ 2
где J mR – момент инерции барабана включения относительно его оси вращения; 2
M м – момент силы сопротивления механизма, жестко связанного с барабаном включения, который в данном случае можно считать величиной постоянной; R – его радиус, м; m – его масса, кг; Fтр f Fпр – сила трения между лентой и барабаном включения, Н;
F пр – сила прижатия ленты к барабану включения, Н; f – коэффициент трения между фрикционной накладкой ленты и барабаном включения [7–8].
В выражении (1) вместо величин F тр и J подставим соответствующие им значения
-
и разрешим полученное уравнение относительно силы прижатия ленты. Получим [9]
F M м mR d Н. (2)
пр fR 2 f dt ’
Барабан включения тормозится до полной остановки за достаточно короткое время 2–5 с. За этот короткий интервал можно считать, что коэффициент трения f = const. Таким образом, закон изменения силы прижатия ленты к барабану в течение одного цикла включения прямо пропорционален замедлению (производной по времени)
скорости вращения барабана. Кривые Fn_Q) и — полностью совпадают по форме и отли-р dt чаются лишь масштабом и сдвигом по оси ординат силы на постоянную величину M м .
fR
Эти кривые определяются кривой ot)t ) , от ее формы зависит тормозной путь.
Длина этого пути, измеренная в радианах, будет равна [10]
Ф = J®( t ) dt, рад.
Следовательно, с помощью электромагнитов можно задать соответствующую функцию силы прижатия Ғ пр )t ) , обеспечивающую такую длину тормозного пути, которая бы давала наименьший износ фрикционного слоя. При линейном уменьшении угловой скорости at (t ) (прямая 1 на рис. 1) от некоторой начальной скорости (У0 барабана включения до нуля тормозной путь равен площади треугольника АО 0О т, т.е.
Фл - 2®0г , рад.
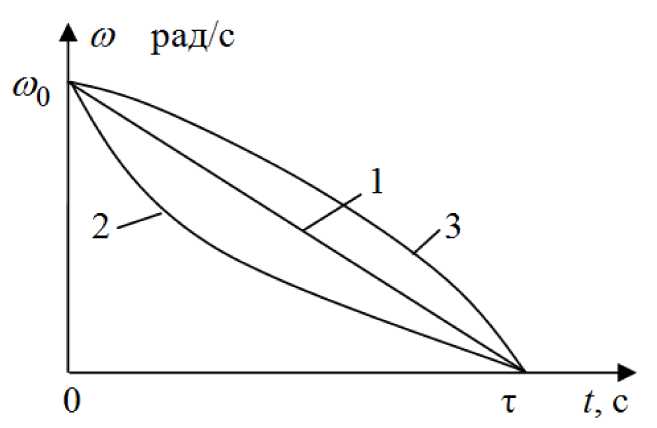
Рис. 1. Кривые уменьшения скорости (t)t ) :
1 – по прямой; 2 – по гиперболе; 3 – по параболе
При гиперболическом законе уменьшения ot)t ) (кривая 2 на рис. 1) тормозной путь (площадь криволинейной трапеции под кривой 2 ) будет фг <фл, а при параболическом (кривая 3 на рис. 1), наоборот, фп > фл .
Результаты исследования
1 А
Рассмотрим случай гиперболического закона уменьшения
0) о tliT где A – некоторый постоянный коэффициент, задаваемый произвольно. Оси координат to 1 и t1 на рис. 2 изображены пунктирными линиями.
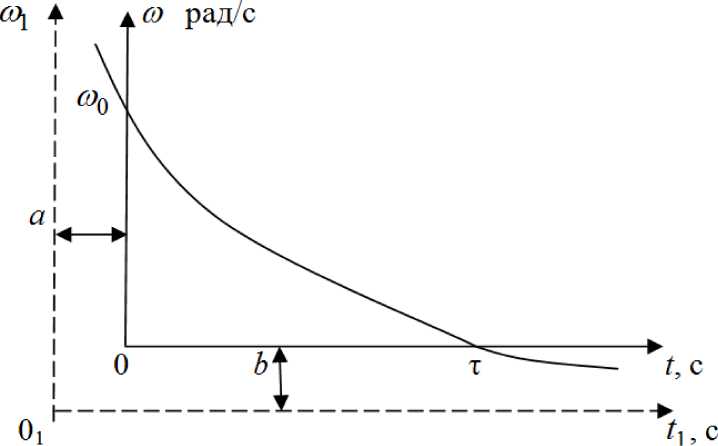
Рис. 2 . Кривая co )t ) , изменяющаяся на интервале торможения t е [0, г] по гиперболическому закону
Рассмотрим данную гиперболу в координатах (со, t), в которых со(0) = co0, ю(т) = 0.(5)
Уравнения перехода из системы координат t0о в ^010)1 будут t1 = t + a, со 1 = со + b. Тогда со 1 = о + b = АХ. или ^t) = А^ - b.
tata
Величины a и b найдем из условий (5). Получим a = j (71 + 4A -1); b = ^°- (71 + 4A -1).
После их подстановки в (6) найдем искомый гиперболический закон уменьшения скорости при торможении барабана включения ю (t)=®0
-----—--1СУ1+4 A -1).
t / t + - (71 + 4 A-1)
2;
Длина тормозного пути при данном торможении определится из выражения (3)
dt
0 1 + - (71 + 4 A -1) 2
- ^- (71 + 4 A -1) = ®or A In
У1 + 4 A + 1 (71+4 A -1)
71 + 4 A -1 2 A
.
, .x L 1+4 A +1 (71+4 A -1)
Функция ф (A) = A In ,------------ г . Л+4Л-1 2 A
монотонно возрастает с ростом пара-
метра A и в пределе ii m ф ( A ) = 0 ,5 , т.е. при A^* тормозной путь ^ ^^L. ^ . Таким A ->00 2
образом, с помощью введенного нами параметра A можно изменять длину тормозного пути в сторону его уменьшения относительно л .
В этом случае закон силы прижатия ленты (2) должен быть таким
А
f mRdUM=MM_mR [TaT^AT)]2• (l0)
пр 2 f dt fR fR f V 2
Анализ большого числа исследований износа различных материалов в условиях граничного трения и трения без смазки показывает, что в общем случае скорость изнашивания может быть выражена зависимостью [11]:
γ = kpmνn , (11) где m = 0,5–3 и для большинства пар трения n = 1; k – коэффициент износа, характеризующий материал пары и условия изнашивания; p – давление на поверхности трения;
v – скорость относительного скольжения.
Для абразивного и ряда других видов изнашивания m = n = 1, у = kpv, или
U = t = kpvt = kps , м (12)
где s = vt – путь трения.
С учетом измерения углового пути в радианах
U = kp г R , м. (13)
Из последней формулы видно, что при n = 1 износ не зависит от скорости относительного скольжения, а лишь от пути трения.
Износ ленты U c учетом (9) определится из выражения:
Таким образом, задача уменьшения износа фрикционного слоя ленты может быть сведена к математической задаче поиска минимума функции U и( ( A) •
Определение величины коэффициента А , соответствующей минимуму функции U(A) , позволит получить зависимости для углового ускорения, в соответствии с которыми и потребуется изменять усилие торможения. Это будет основанием для программирования микропроцессорного устройства управления электромагнитами.
По мере износа фрикционной накладки тормозной ленты будет увеличиваться сила ее прижима к барабану включения. Поэтому во время работы устройства необходимо периодически контролировать толщину ленты, для того чтобы обеспечить заданное время торможения барабана включения. Кроме того, мощность на привод у разных сельхозмашин отличается, соответственно изменяется и крутящий момент на барабане включения. Это также требует корректировки силы прижима ленты к барабану.
Алгоритм управления электроприводом включения ВОМ выглядит следующим образом (рис. 3).
Перед агрегатированием приводной сельхозмашины на модуле управления устанавливается соответствующая частота вращения выходного вала ВОМ. Затем – значение мощности на привод сельскохозяйственной машины согласно ее технической документации. Устройство включения готово к использованию. При работе агрегата происходит периодическое включение и отключение привода ВОМ, связанное с остановками на технологическое обслуживание, переездами между загонками и полями. Вследствие такого режима постепенно изнашивается фрикционная накладка тормозной ленты.
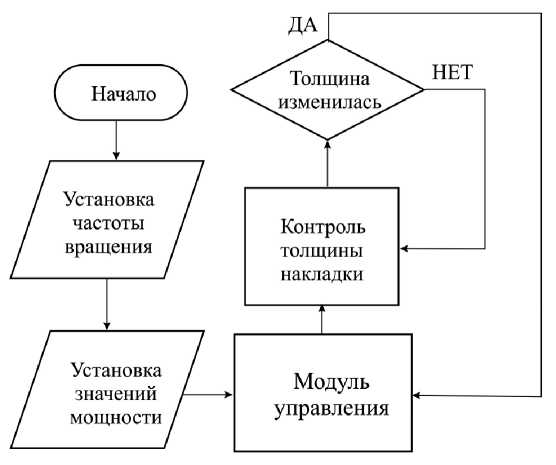
Рис. 3. Алгоритм управления электроприводом включения ВОМ
Модуль управления проводит периодический контроль толщины накладки. При обнаружении определенной величины износа модуль управления осуществляет изменение усилия прижатия ленты к барабану. Проводится также расчет интенсивности изнашивания накладки. В случае повышения интенсивности износа модуль управления снижает периодичность контроля. На табло модуля управления представлено прогнозное значение наработки ленты до предельного износа. При достижении 90% наработки до предельного износа накладки модуль управления подает дополнительный световой сигнал. Кроме того, осуществляется контроль пробуксовывания барабана относительно ленты. При появлении пробуксовывания, связанного с кратковременным повышением нагрузки на выходной вал ВОМ из-за колебания поступающего объема биологической массы, обрабатываемой сельхозмашиной, модуль управления увеличивает силу прижима ленты к барабану включения.
Выводы
Идея применения электромагнитов для эффективного торможения барабана включения ВОМ, ранее защищенная патентом [1], вполне может быть реализована на практике. Это подтвердили проведенные исследования и теоретические расчеты. Практическая реализация идеи может дать значительный экономический эффект при эксплуатации, техническом обслуживании и ремонте усовершенствованных конструкций ВОМ. Предлагаемая конструкция дает возможность включать электромагниты не одновременно, а с некоторым смещением по времени, с постепенным прижатием ленты, начиная с участка ленты, ближайшего к оси ее подвеса. Для определения порядка включения электромагнитов необходимо провести экспериментальные исследования. При переходе от механического устройства включения привода к электрическому исключается операция периодического регулирования рычага включения, сокращая время технического обслуживания и значительно повышая долговечность тормозной ленты. Введение обратной связи в виде контроля пробуксовывания барабана позволит обеспечить оптимальное усилие прижима ленты к барабану и допустимую величину интенсивности износа фрикционной накладки ленты.
A.A. Luchinovich, G.V. Redreev, A.N. Sorokin, V.D. Chervenchuk Omsk State Agrarian University named after P.A. Stolypin, Omsk
Definition of the optimal kinematic modes of the electric drive of the power take-off shaft switching
Список литературы Определение оптимальных кинематических режимов электропривода включения вала отбора мощности
- Пат. 185594 Российская Федерация, МПК B04K 17/28. Вал отбора мощности / Г.В. Редреев, А.А. Лучинович; патентообладатель ФГБОУ ВО "Омский государственный аграрный университет им. П.А. Столыпина". - № 2018120959; заявл. 06.06.2018; опубл 11.12.2018, Бюл. № 35. - 2 с.
- Improving the Efficiency of the Power Take-Off Drive. / G.V. Redreev et al. // IOP Conference Series: materials Science and Engineering, Volume 582, Number 1 https://iopscience.iop.org/article/10.1088/ 1757-899X/582/1/012043. DOI: 10.1088/1757-899X/582/1/012043
- Редреев Г.В. Повышение эффективности привода отбора мощности / Г.В. Редреев, А.Н. Сорокин, А.А. Лучинович // Сб. тр. X Междунар. науч.-практ. конф. - Томск, Юргинский технологический институт, 2019. - С. 81-86.
- Multi-body Dynamic Analysis of the Braking Process for Megawatt Wind Turbine Disc Brake / S. Zhang, C. Xue, J. Yin, Z. Sha, F. Ma, D. Yang and Y. Liu / IOP Conf. Series: materials Science and Engineering 470 (2019) 012005 IOP Publishing.
- Кузнецов С.И. Курс физики с примерами решения задач. Часть I. Механика. Молекулярная физика. Термодинамика: учеб. пособие / С.И. Кузнецов; под ред. В.В. Ларионова; Томский политехнический университет. - 3-е изд., перераб. и доп. - Томск: Изд-во Томского политехнического университета, 2013. - 413 с.
- Тарасов Л.В. Современный курс физики. Механика / Л.В. Тарасов. - М.: Оникс, 2009. - 592 с.
- Яблонский А.А. Курс теоретической механики / А.А. Яблонский. - М.: Высшая школа, 1986. - 412 с.
- Тарг С.М. Краткий курс теоретической механики: учеб. для втузов / С.М. Тарг. - 10-е изд., перераб. и доп. - М.: Высш. шк., 1986. - 416 с.
- Подскребко Э.Н. Дифференциальное исчисление функций нескольких переменных: учеб. пособие / Э.Н. Подскребко, Н.Ф. Пестова. - Томск: Изд-во Томского политехнического университета, 2008. - 132 с.
- Пискунов Н.С. Дифференциальное и интегральное исчисления: учебник: В 2-х т. Т. 1 / Н.С. Пискунов. - СПб.: Мифрил. Гл. ред. физ.-мат. лит., 1996. - 416 с.
- Проников А.С. Надежность машин / А.С. Проников. - М.: Машиностроение, 1978. - 592 с.
