Определение орбиты по выполняемым космонавтами снимкам поверхности земли и луны

Автор: Микрин Евгений Анатольевич, Беляев Михаил Юрьевич, Боровихин Павел Александрович, Караваев Дмитрий Юрьевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 4 (23), 2018 года.
Бесплатный доступ
Освоение Луны является одной из основных задач на ближайшие десятилетия для ведущих космических стран. Некоторые задачи планируемой Лунной программы могут быть отработаны в рамках проекта МКС. Одна из них, связанная с отработкой методов определения орбиты космического аппарата по снимкам поверхности планеты, рассмотрена в данной статье. Даны методические особенности решения этой задачи, и приведены примеры отработки предложенной технологии автономной навигации по съемкам Земли с борта Российского сегмента МКС. С помощью снимков, сделанных астронавтами США через иллюминатор лунного орбитального модуля, показана также перспективность применения предложенной технологии определения орбиты по снимкам поверхности Луны.
Лунная программа, определение орбиты, космические снимки, ортотрансформирование снимков
Короткий адрес: https://sciup.org/143168443
IDR: 143168443 | УДК: 629.78.076.6:521.3:528.8
Determining orbit from earth and moon surface pictures taken by cosmonauts
Lunar exploration is one of the major tasks of the next few decades for the leading spacefaring nations. Some of the tasks of the planned Lunar program can be practiced within the framework of the ISS project. One of them, dealing with the developmental testing of techniques for determining a spacecraft orbit from pictures of the planetary surface, is discussed in this paper. The paper describes procedural aspects involved in solving this problem and provides examples of developmental testing of the proposed autonomous navigation technique using pictures of Earth taken from onboard the ISS Russian Segment. Using pictures taken by USА astronauts through the window of the lunar orbital module, it also demonstrates the viability of using the proposed technique for determining orbit from pictures of the lunar surface.
Текст научной статьи Определение орбиты по выполняемым космонавтами снимкам поверхности земли и луны
МИКРИН Е.А.

БЕЛЯЕВ М.Ю.

БОРОВИХИН П.А.

КАРАВАЕВ Д.Ю.
Использование возможностей МКС для решения научных и прикладных задач при подготовке Лунной программы
Естественное развитие космонавтики связано с освоением Солнечной системы. В настоящее время только Луна и Марс рассматриваются как цели освоения космоса человеком [1], поскольку только на них возможно продолжительное пребывание людей. В соответствии с программами ведущих космических стран, Луна является первым внеземным объектом, который планируется освоить в ближайшие десятилетия, и в XXI веке может начаться конкуренция за обладание лунными природными ресурсами [1–3].
Реализация проекта освоения Луны обеспечит создание окололунной инфраструктуры, начало пилотируемых миссий на поверхность Луны и, в перспективе, создание базы на поверхности Луны в интересах российской программы фундаментальных и прикладных космических исследований, а также будущих пилотируемых полетов к Марсу и другим телам Солнечной системы.
Освоение Луны в рамках российской программы должно происходить как постепенное расширение создаваемой инфраструктуры на предварительно разведанном плацдарме, который выбирается на поверхности Луны с учетом благоприятных условий освещенности, возможности связи с Землей и наличия лунных природных ресурсов.
На первом этапе выполнения Лунной программы целесообразно активное использование возможностей, имеющихся в проекте МКС [4]. В рамках проекта МКС возможно решение следующих научных задач в поддержку планируемой Лунной программы:
-
• летная отработка аппаратуры, приборов и систем для лунных аппаратов и лунной базы;
-
• изучение функционирования человека при выполнении различных работ при отсутствии (или пониженной) гравитации;
-
• отработка аппаратуры и методов изучения лунной поверхности;
-
• отработка технологий аддитивного производства изделий;
-
• отработка технологии управления напланетными роботами с орбитальной станции;
-
• отработка методов определения орбиты космического аппарата (КА) по снимкам поверхности планеты и т. д.
Отработка на МКС аппаратуры и технологий для изучения и освоения Луны позволит нашей стране ускорить развертывание работ в наиболее выгодных районах Луны и закрепить право на последующее использование этих районов.
Методические особенности определения положения КА на орбите по снимкам планеты
Для успешного выполнения пилотируемого полета к Луне необходимо решить ряд технических проблем, одной из которых является автономная навигация при облете Луны. До некоторого удаления КА от Земли орбитальные параметры и импульсы коррекции могут формироваться по данным от наземного измерительного комплекса. Могут использоваться и данные от бортовой аппаратуры спутниковой навигации [5], причем практическую дальность работы этой аппаратуры еще требуется определить. Однако, в окрестности Луны и в то время, когда Луна закрывает от КА Землю, импульсы коррекции необходимо формировать с привлечением данных от автономных навигационных измерений, которые традиционно проводят, используя специальную оптическую аппаратуру для определения направления на выбранные звезды, а также на положение Луны, Земли и Солнца. Методы и средства автономной навигации разрабатывались еще в 1960-е гг. в рамках отечественной Лунной программы для пилотируемого корабля «Союз», создаваемого для полетов к Луне. После закрытия этой программы методы и средства автономной навигации были доработаны и реализованы в системе «Дельта» на орбитальных станциях «Салют» [6].
Для определения параметров орбиты КА возможно также использовать снимки планеты [7]. Причем в настоящее время уровень развития профессиональной цифровой фотоаппаратуры позволяет экипажу использовать для навигационных измерений не только специальную фототехнику, но и обычный серийный фотоаппарат, проводя съемку освещенной поверхности Луны через иллюминатор.
Выполненные цифровой камерой снимки поверхности Луны экипаж может перенести в бортовой лэптоп и провести над ними любые преобразования, в т. ч., определить точку съемки, т. е. положение фотоаппарата в пространстве в момент выполнения снимка. При необходимости эти автономно вычисленные экипажем данные затем могут быть введены в систему управления. В дополнение к существующим методам навигации такая съемка Луны может быть использована, например, для организации резервной, контролирующей или аварийной автономной систем навигации.
Рассмотрим решение задачи автономной навигации по съемкам земной поверхности экипажами Российского сегмента (РС) МКС. В съемках лунной и земной поверхностей имеются существенные различия, однако использование МКС позволяет отработать возможные подходы к решению задачи автономной навигации по снимкам, а также оценить погрешность полученных результатов и влияние на нее различных факторов.
Для решения задач автономной навигации при облете Луны с помощью съемок экипажем лунной поверхности возможно использование следующей аппаратуры, сертифицированной для космических полетов: цифрового фотоаппарата Nikon с длиннофокусным (до 1 200– 1 600 мм) объективом типа Nikkor и бортового лэптопа (например, ноутбука марки HP Zbook тип 15). Данные технические средства уже эксплуатируются на борту МКС и доказали свою пригод- ность для использования в космическом полете [8].
Ортотрансформирование снимков для определения точки съемки. Если известны положение и ориентация КА на орбите в момент получения снимка поверхности планеты, то принципиально несложно расчетным путем определить долготу и широту каждого пикселя цифрового фотоснимка (точнее, соответствующей этому пикселю точки на поверхности планеты), построив воображаемые лучи, выходящие из пикселей ПЗС-матрицы и пересекающие через фокус объектива поверхность планеты в точках, попавших на снимок.
В автономной навигации требуется решить обратную задачу: по известным угловым координатам всех пикселей снимка необходимо определить единственную точку в пространстве, в которой сходятся все воображаемые лучи, выходящие из известных точек на поверхности и попадающие затем в каждый пиксель ПЗС-матрицы фотоаппарата.
Для того чтобы угловые координаты пикселей снимка стали заранее известны, необходимо:
-
• наличие ортофотоплана поверхности планеты, т. е. приведенного к ортогональной проекции изображения, в общем случае интегрированного из многих снимков, выполненных с разных КА;
-
• преобразование выполненного снимка к проекции этого имеющегося ортофотоплана, т. е. ортотрансформирование снимка.
Ортофотопланы поверхности Луны и планет, созданные по снимкам с автоматических
КА, доступны в интернете [9]. Таким образом, решенная с помощью КА задача построения ортофотопланов поверхностей планет (математических моделей поверхностей) позволяет решать с их помощью обратную задачу, т. е. определять положение КА по выполняемым с него снимкам поверхности планеты. Аналогично, например, по уточненному с помощью измерений магнитному полю Земли и его построенной математической модели решается задача определения углового положения КА в пространстве по магнитометрическим измерениям [10].
Из применяемой в фотограмметрии теоремы двойных соотношений следует, что для ортотрансформирования снимка требуется найти не менее четырех общих (опорных) точек на снимке и ортофотоплане. В настоящее время не существует надежного и универсального алгоритма автоматического поиска таких общих точек, поэтому целесообразно, чтобы их поиск производил оператор (экипаж). Оператор должен также контролировать правильность проведенных преобразований, например, по совпадению изображений поверхности на границах «наложенного» на ортофотоплан снимка. Все остальные операции и вычисления могут быть выполнены затем автоматически.
Таким образом, при проведении автономных навигационных измерений с помощью фотоаппарата космонавт должен выполнить съемку поверхности Луны через иллюминатор, затем перенести снимки в бортовой лэптоп и с помощью специального программного обеспечения (ПО) их ортотрансформировать. При этом космонавт должен по ортофотоплану опознать местность на снимке. Затем простейшими действиями («кликами» компьютерной «мыши» на лэптопе) необходимо указать четыре общие точки на снимке и плане, выбирая их для повышения точности преобразования возможно ближе к углам снимка.
Далее снимок автоматически преобразовывается по указанным точкам к проекции ортофотоплана и для контроля «накладывается» на ортофотоплан. Космонавт контролирует правильность выбора общих точек по совпадению изображения поверхности на границах между ортофотопланом и наложенным на него снимком. При необходимости выбор общих точек можно повторять до тех пор, пока «наложенное» на ортофотоплан изображение не совпадет с требуемой точностью (например, один-два пикселя) с изображением на самом ортофотоплане.
После этого автоматически может быть проведен расчет положения КА в пространстве относительно положения Луны, т. е. определен радиус-вектор КА в момент съемки в системе координат (СК), связанной с Луной. По найденным таким образом положениям КА в пространстве может быть определена его орбита [11].
Полученные результаты могут быть также автоматически преобразованы к виду, удобному для их сравнения с данными других автономных навигационных измерений или для введения их в систему управления с целью формирования корректирующих импульсов.
Поскольку для повышения точности и надежности вычислений при использовании методов математической статистики может потребоваться значительное число ортотрансформированных снимков, процесс выбора четырех общих точек на снимках и ортофотопланах можно автоматизировать с помощью алгоритмов распознавания изображений. Этот процесс при съемках Луны облегчается тем, что, при большом количестве заметных ориентиров, изменения вида ее поверхности определяются только светотеневой обстановкой и не осложняются облачностью и сезонными изменениями, как при съемках Земли. Работа космонавта с таким программным обеспечением сводится к контролю результатов автоматической привязки снимков и выполнению «ручной» привязки в особо сложных случаях.
Определение точки съемки по орто-трансформированному снимку. Для расчета точки съемки на снимке выбираются «особые» пиксели — центральный пиксель снимка и пиксели, лежащие на воображаемой окружности, вписанной в прямоугольник снимка. На поверхности планеты точки, соответствующие пикселям этой окружности, образуют фигуру (пересечение фигуры планеты с конусом), близкую к эллипсу. Расстояния от этих точек до точки B, соответствующей на поверхности планеты центру снимка, могут быть рассчитаны, поскольку в результате ортотрансформирования известны географические координаты всех точек, попавших на снимок. Затем на «эллипсе» выбираются две точки A и C, лежащие в противоположных сторонах по отношению к точке В, расстояние между которыми является наибольшим.
Искомая точка съемки лежит в плоскости главного вертикала снимка, проходящей через точку поверхности планеты B , две найденные точки A и C большой полуоси «эллипса» и центр планеты O (рис. 1).
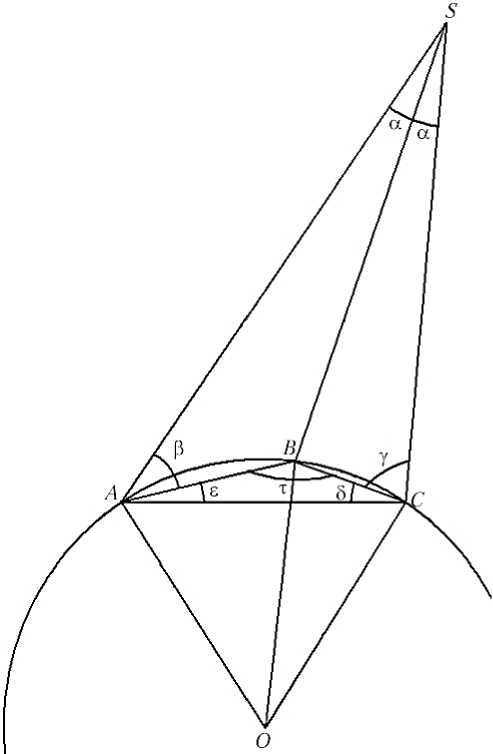
Рис. 1. Схема выполнения снимка поверхности планеты: О — центр планеты; В — центр снимка; А и С — выбранные точки с максимальным расстоянием между ними; S — точка съемки
Таким образом, пространственная задача сводится к плоской, показанной на рис. 1. Искомая точка съемки обозначена на этом рисунке как точка S . Как следует из данной схемы, известны:
-
• векторы AB и BC ;
-
• углы «раствора» снимка α , определяемые фокусным расстоянием и размером ПЗС-матрицы, известными для заданного типа фотоаппарата;
-
• угол τ , учитывающий сферичность поверхности планеты и определяемый из скалярного произведения векторов AB и BC .
Из анализа углов α , β , γ , δ , ε системы треугольников, приведенной на рис. 1, и теоремы синусов следует, что:
AB /sin α = BS /sin β ; BC /sin α = BS /sin γ ;
2 α + β + γ + δ + ε = π ;
π – 2 α – δ – ε = τ – 2 α ; β = τ – 2 α – γ .
Из этих соотношений определяется угол γ : tg γ = (sin τ cos2 α – cos τ sin2 α )/
/(cos τ cos2 α + sin τ sin2 α + BC / AB ).
Определив угол γ , можно найти угол β и вычислить расстояние от точки съемки S до центра снимка B :
BS = AB sin β /sin α .
При переходе от плоской задачи к пространственной учитывается, что векторы OB и BS лежат в одной известной плоскости, и угол между ними известен. Введем СК OXYZ с центром в точке O , ось Y проходит через OB , ось X лежит в плоскости OAB и направлена перпендикулярно оси Y в сторону точки С , ось Z дополняет СК до правой. В СК OXYZ вектор BS имеет нулевую координату Z , а его компоненты вдоль осей Х и Y определяются как проекции BS на OB и направление, перпендикулярное OB , т. е. как BS sin ρ и BS cos ρ , где ρ — угол между векторами OB и BS .
Географические координаты точки B в результате ортотрансформирования снимка известны. Поэтому координаты радиус-вектора OB могут быть вычислены в некоторой базовой СК с началом в центре планеты, и можно составить матрицу перехода от базовой СК к выбранной выше СК OXYZ и получить радиус-вектор OS , т. е. искомое пространственное положение точки S в базовой СК, связанной с положением центра масс планеты.
В общем случае можно построить два положения точки S симметрично относительно линии OB . Для определения истинного варианта теоретически достаточно сравнить длины отрезков AB и BC и выбрать то положение, которое находится со стороны отрезка с меньшей длиной. Однако на практике при съемке районов, относительно близких к надиру, из-за неточностей привязки и ортотрансформирования снимков этот метод может оказаться недостаточно надежным. В таких случаях возможны следующие подходы (или их комбинации):
-
• заранее провести на ортофотоплане номинальную (штатную) трассу полета. Выбирается вариант для точки S (точнее,
подспутниковой точки 5' ), находящейся ближе к трассе полета;
-
• сделать несколько снимков подряд. Истинные положения точки S должны находиться практически на одной прямой, т. е. в плоскости орбиты и через определенные расстояния;
-
• выполнить несколько снимков одного участка поверхности (с центром примерно в одной и той же точке). В этом случае в последовательных снимках координаты истинных точек S будут меняться в соответствии с направлением полета, а координаты «зеркальных» точек будут меняться в противоположную сторону.
Рассмотрим теперь факторы, влияющие на точность определения точки съемки.
Из приведенного выше алгоритма следует, что чем ближе центр снимка к надиру, тем менее точным будет определение положения плоскости главного вертикала. Влияние на результат оказывают также неточности изготовления и установки объектива, несовпадение истинного фокусного расстояния с реальным (например, при номинале 800 мм истинное значение фокусного расстояния может быть на несколько миллиметров больше или меньше), неточность установки отсчета времени в аппаратуре (например, при ее синхронизации вручную) и т. п. Также точность расчетов принципиально ограничивается точностью ортофотоплана, применяемого при ортотрансформировании снимков.
Влияние указанных факторов может быть учтено, во-первых, с помощью предварительной тарировки по известному положению КА, а во-вторых, с помощью соответствующей организации самих съемок и расчетов. Можно использовать статистические методы обработки, включив в уравнения в качестве неизвестных параметров величины, точность определения которых необходимо повысить [11].
Заметим также, что под углом а к лучу SB расположены не только лучи SA и SC (см. рис. 1), но и любые другие лучи, проведенные из точки S к точкам вписанной в снимок окружности. Поэтому правильность определения положения точки S можно проверить с помощью пары лучей в плоскости, перпендикулярной плоскости главного вертикала. Они должны быть наклонены под таким же углом а к «центральному» лучу SB. Если углы отличаются от требуемого значения а на величину больше заданной погрешности, то с помощью решения системы двух уравнений в частных производных определяется смещение реального центра изображения относительно центрального пикселя снимка.
Отработка технологии автономной навигации по съемкам Земли с борта РС МКС
Для проверки изложенных выше методов был проведен ряд вычислений положения МКС на орбите по снимкам земной поверхности, выполненным через иллюминаторы экипажами РС МКС в экспериментах «Ураган», «Визир», «Вектор-Т». При съемках использовалась фотоаппаратура фирмы Nikon .
Заметим, что съемки земной поверхности имеют ряд отличий от съемок Луны:
-
• влияние земной атмосферы требует учета рефракции;
-
• облачность и мировой океан не позволяют ортотрансформировать любые сделанные снимки;
-
• все съемки с МКС выполнены примерно с одной и той же высоты орбиты ~410 км;
-
• при высоком разрешении снимков необходимо учитывать рельеф местности, в частности, высоту над уровнем мирового океана.
Результаты расчетов положения МКС сопоставлялись с расчетами, выполняемыми группой математического моделирования в Центре управления полетами методом численного интегрирования на основании данных от регулярных сеансов радиоконтроля орбиты. При этом оценивалась возможная погрешность определения положения МКС в зависимости от параметров орбиты и особенностей съемки земной поверхности.
Приведем характерные примеры результатов определения положения точек съемки.
Для снимка № 3004, сделанного 27.06.2016 г., угол направления на МКС относительно местного горизонта с вершиной в точке Земли, соответствующей центру снимка, составил ~72 ° . В результате выполненных расчетов оказалось, что промах подспутниковой точки M относительно положения МКС составил ~9 км на земной поверхности, а промах по высоте МКС над эллипсоидом — ~3 км, при этом высота над эллипсоидом в центре снимка была принята равной 400 м.
Для центра снимка № 0402 (рис. 2) угол между направлением на МКС относительно местного горизонта составляет ~59 ° .
Положение точек A и C (рис. 3) максимального удаления от центра B определяется в этом случае точнее, чем на снимке № 3004.

Рис. 2. Снимок № 0402, 8 декабря 2015 г., 20:23:22 UTC. Фокусное расстояние 400 мм, дальность 471 км, масштаб исходного снимка 10 м/пиксель. Тегеран, Иран, ночная съемка. Угол съемки (угол между направлением на МКС и местным горизонтом) 59°
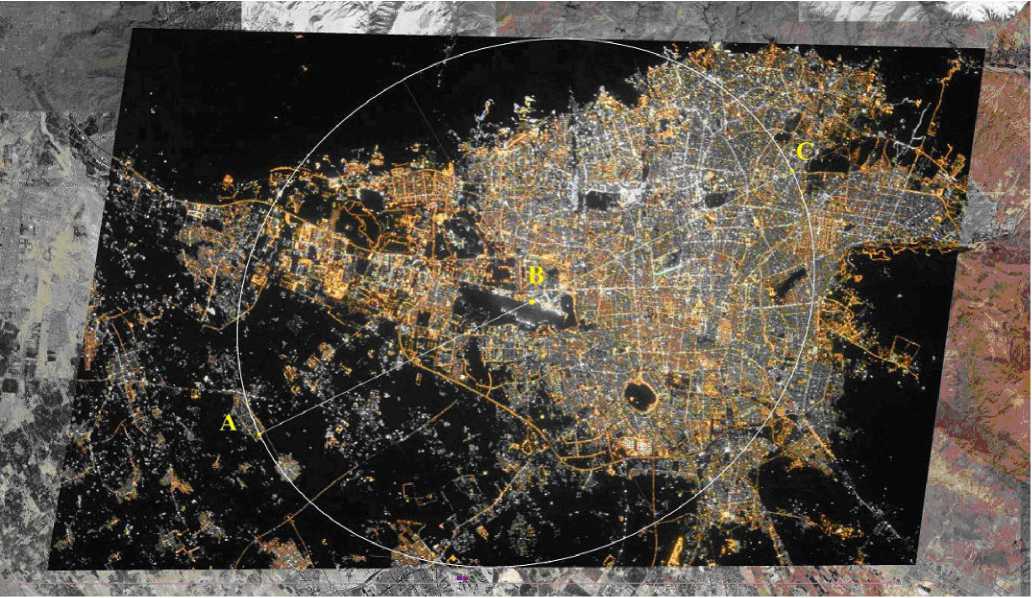
Рис. 3. Снимок № 0402, наложенный на ортофотоплан с построением вписанной окружности и нахождением плоскости главного вертикала. Точки максимального удаления на окружности A и B определяются точнее, чем на снимке № 3004, поскольку центр снимка располагается дальше от подспутниковой точки
На рис. 4 показано положение подспутниковой точки M ' относительно трассы полета. Промах подспутниковой точки M ' относительно положения МКС (красная метка) составляет ~2 км на земной поверхности. Промах по высоте МКС над эллипсоидом 3 км, при этом высота над эллипсоидом в центре снимка принята равной 1 200 м. Учитывалась рефракция атмосферы согласно работе [12].

Рис. 4. Положение подспутниковой «зеркальной» точки M ' и точек A, B, C на карте. Синей линией обозначена трасса полета по начальным условиям № 740. Красной меткой обозначена «истинная» подспутниковая точка МКС в момент съемки
Следовательно, для повышения точности определения КА целесообразно выполнять фотографирование объектов, наиболее удаленных от надира, насколько позволяют возможности ручной и аппаратной съемок.
Для последующего определения параметров орбиты на основании полученных положений точек съемки можно применять методику, отработанную еще на орбитальной станции «Мир», где в качестве исходных данных использовались измерения координат с помощью GPS -приемника [11].
Навигация по снимкам экипажей кораблей «Аполлон»
Во время лунных экспедиций 1969–1972 гг. экипажи кораблей «Аполлон» через иллюминаторы выполняли на разной дальности съемки лунной поверхности пленочным фотоаппаратом «Хассельблад» с размером кадра 70 x 70 мм. Впоследствии эти снимки были переведены в цифровую форму и выложены в открытый доступ [13].
Перевод в цифровой вид проводился, видимо, не очень тщательно, например, у некоторых снимков видны неровные края кадров. Кроме этого, разрешение цифрового образа в большинстве случаев невелико (450x450 пикселей). Эти недостатки существенно увеличивают погрешность определения точек съемки. Кроме того, в источнике [13] не приведено и положение лунных модулей относительно Луны в момент съемок, иногда указана лишь высота модуля над поверхностью Луны.
Тем не менее, в отличие от более современных, подробных и изначально цифровых изображений лунной поверхности данные снимки были выполнены экипажем «с рук» через иллюминаторы. Поэтому представляет особый интерес применение описанной выше технологии к этим снимкам с целью проверки возможности их ортотрансформирования и определения радиус-вектора лунного модуля в момент каждого снимка.
Для тестирования был выбран ряд снимков. В результате расчетов были определены масштаб снимков (точнее, масштаб оцифрованного изображения, а не исходных пленочных кадров), радиус-вектор лунного модуля в момент снимка и высота над лунной поверхностью (таблица, рис. 5–8).
Результаты расчетов для снимков № 10307 и 22797
|
Снимок |
10307 |
22797 |
|
Дальность, км |
1 483 |
102 |
|
Масштаб, м/пиксель |
15 780 |
286 |
|
Высота, км |
1 482 |
97 |
|
Радиус-вектор, км ( x; y; z ) |
–649; 3153; 58 |
–1 727; 201; –583 |
|
Подспутниковая точка, ° (долгота; широта) |
101,632; 1,045 |
173,343; –18,590 |
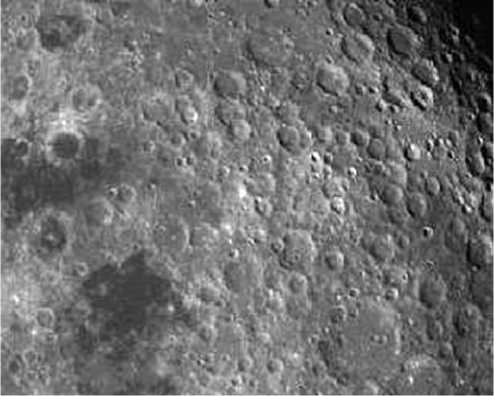
Рис. 5. Снимок лунной поверхности (Море Смита и др.) № 10307, выполненный экипажем «Аполлон-14». Фокусное расстояние 80 мм, масштаб оцифрованного снимка 15 780 м/пиксель
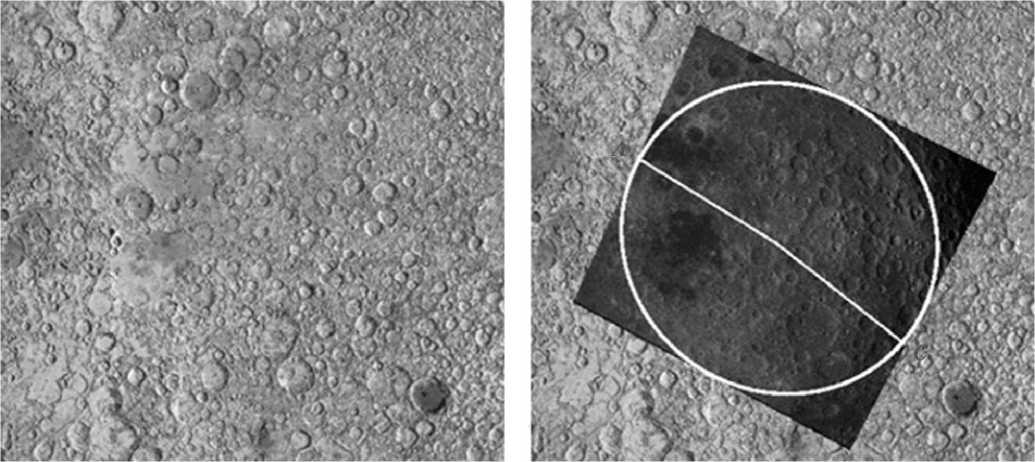
а)
б)
Рис. 6. Фрагмент ортофотоплана лунной поверхности и снимок № 10307, ортотрансформированный по этому фрагменту
Как следует из приведенных в таблице результатов, высота орбиты в момент снимка № 22797 по расчету 97 км, а по данным, приведенным вместе со снимком, 118 км. Для снимка № 10307 значение высоты в источнике [13] не указано.
Следует отметить, что, несмотря на это несовпадение высот (в ресурсе [13] не указано, как именно определялись высоты, приведенные вместе со снимками), этапы обработки снимков с помощью описываемой технологии в целом получились. Отсутствие атмосферы, большое количество легко различимых цирков и кратеров на лунной поверхности позволяет уверенно опознавать и ортотрансформировать даже такие, не очень точно оцифрованные, изображения (рис. 6, 8).

Рис. 7. Снимок лунной поверхности (кратер Эйткен) № 22797, выполненный экипажем «Аполлон-17». Фокусное расстояние 250 мм, масштаб оцифрованного снимка 286 м/пиксель. Указана высота 118 км
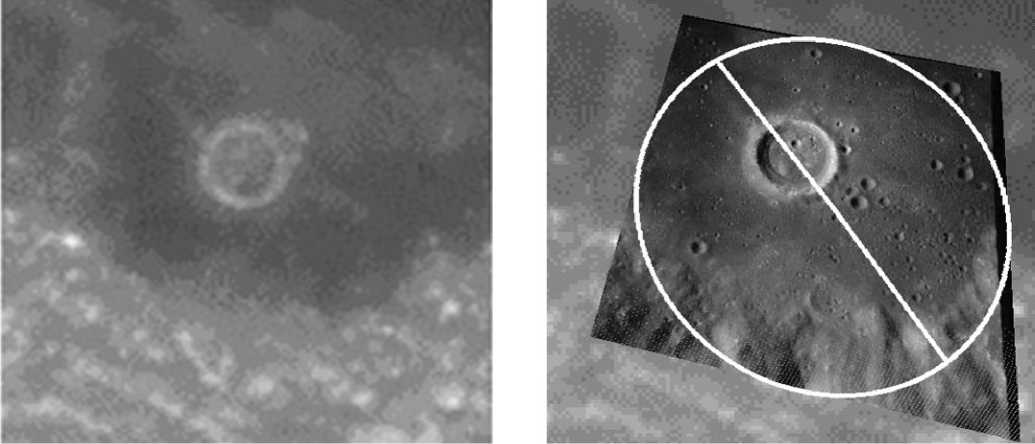
Рис. 8. Фрагмент ортофотоплана лунной поверхности и снимок № 22797, ортотрансформированный по этому фрагменту
Заключение
Автономная навигация является важной задачей при выполнении пилотируемого полета к Луне. Современный уровень развития цифровой фотоаппаратуры позволяет использовать для определения параметров орбиты КА снимки поверхности Луны. При наличии на борту КА компьютера со сравнительно большим экраном дисплея космонавт может не только рассматривать и сохранять на нем высококачественные снимки лунной поверхности, но и извлекать из них полезную навигационную информацию. Для этого надо иметь в бортовом компьютере карту (ортофотоплан) Луны в ортогональной проекции и специальное ПО, позволяющее космонавту простыми действиями оперативно привести снимки Луны к проекции такой карты. Получив в результате этих преобразований угловые координаты всех пикселей цифрового снимка лунной поверхности, с помощью предложенной технологии можно определить точку в пространстве, откуда был выполнен снимок.
Как показывают результаты экспериментов, выполненных на борту МКС, даже детальные снимки с фокусным расстоянием 800 мм, захватывающие лишь небольшой район земной поверхности, позволяют приближенно определить точку съемки на орбите по одному единственному снимку. При этом для высоты орбиты 410 км наилучшие результаты получены для фокусного расстояния 400 мм и угле съемки между направлением на МКС относительно местного горизонта 60 ° . Промах между «истинной» подспутниковой точкой (полученной численным интегрированием и рассчитанной по предложенной методике) составил ~2 км. Такая точность представляется вполне приемлемой при расчете корректирующих импульсов, а значит, предлагаемый способ автономной навигации, не требующий для КА специальной аппаратуры и дополнительной массы, может быть использован в реальном полете.
Для подтверждения возможности применения данной технологии в лунных полетах были использованы также оцифрованные снимки Луны, сделанные почти полвека назад астронавтами США через иллюминатор лунного орбитального модуля. Было показано, что предложенная методика позволяет преобразовать эти снимки в ортогональную проекцию и рассчитать радиус-вектор КА в момент съемки, что подтверждает перспективность применения технологии определения орбиты по выполняемым космонавтами снимкам поверхности Луны. При автоматизации процесса опознавания лунной поверхности на снимке и реализации указанных выше способов увеличения точности определения орбиты данным методом автоматические КА, фотографирующие лунную поверхность, могут на определенном этапе также играть роль навигационных спутников для решения задачи определения координат различных объектов, перемещающихся по лунной поверхности.
Список литературы Определение орбиты по выполняемым космонавтами снимкам поверхности земли и луны
- Луна -шаг к технологиям освоения Солнечной системы/Под науч. ред. Легостаева В.П., Лопоты В.А. М.: РКК «Энергия». 2011. 584 с.
- Брюханов Н.А., Легостаев В.П., Лобыкин А.А., Лопота В.А., Сизенцев Г.А., Синявский В.В., Сотников Б.И., Филиппов И.М., Шевченко В.В. Использование ресурсов Луны для исследования и освоения Солнечной системы в XXI веке//Космическая техника и технологии. 2014. № 1(4). С. 3-14.
- Шевченко В.В. Утилизация привнесенного на Луну астероидного вещества -экономичный путь к получению космических ресурсов высокой ценности//Космическая техника и технологии. 2018. №1 (20). С. 5-22.
- Микрин Е.А., Беляев М.Ю. Пилотируемая космонавтика -основа для развития ракетно-космической техники//Труды LI Чтений К.Э. Циолковского. Секция «Проблемы ракетной и космической техники». Калуга, 20-22 сентября 2016 г. Казань, 2017. С. 5-15.
- Микрин Е.А., Михайлов М.В. Навигация космических аппаратов по измерениям от глобальных спутниковых навигационных систем. М.: Изд-во МГТУ им. Н.Э. Баумана, 2017. 345 с.
- Гаушус Э.В., Зыбин Ю.Н., Легостаев В.П. Автономная навигация и управление орбитальной станцией «Салют-7»//Космические исследования. 1986. Т. 24. № 6. С. 1-28.
- Патент 2654883. Российская Федерация. Способ определения временной привязки производимых с космического аппарата снимков земной поверхности. Боровихин П.А., Караваев Д.Ю., Беляев М.Ю.; заявитель и патентообладатель -ПАО «РКК «Энергия»; заявка 2016135209A; приоритет от 30.08.2016 г.//Изобретения. Полезные модели. 2018. № 15.
- Беляев М.Ю., Десинов Л.В., Караваев Д.Ю., Сармин Э.Э., Юрина О.А. Аппаратура и программно-математическое обеспечение для изучения земной поверхности с борта Российского сегмента Международной космической станции по программе «Ураган»//Космонавтика и ракетостроение. 2015. № 1. С. 63-70.
- Google Moon. Режим доступа: https://www.google.ru/moon/(дата обращения 15.08.2018 г.).
- Беляев М.Ю. Научные эксперименты на космических кораблях и орбитальных станциях. М.: Машиностроение, 1984. 264 с.
- Беляев М.Ю., Рулев Д.Н., Чернопятов A.M., Сазонов В.В., Феккерспергер С., Пеффген В. Определение движения орбитальной станции «Мир» по данным измерений GPS//Космические исследования. 1999. Т. 37. № 3. C. 276-282.
- Куштин И.Ф. Рефракция световых лучей в атмосфере. М.: Недра, 1971. 128 с.
- Apollo Image Atlas. Режим доступа: http://www.lpi.usra.edu/resources/apollo/frame/(дата обращения 15.08.2018 г.).
