Определение параметров электродинамической космической тросовой системы в задаче уборки космического мусора

Автор: Ледков Александр Сергеевич, Ковалв Алексей Олегович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 2-1 т.17, 2015 года.
Бесплатный доступ
В данной статье разработана математическая модель электродинамической космической тросовой системы и проведено исследование влияния величины силы тока и длины троса на время увода с орбиты нефункционирующего космического объекта. Проведена серия численных экспериментов, в ходе которых установлено, что при увеличение длины троса и силы тока время увода нефункционирующего космического объекта с орбиты уменьшается.
Космическая тросовая система, электродинамический трос, космический мусор, формализм лагранжа, сила ампера
Короткий адрес: https://sciup.org/148203613
IDR: 148203613 | УДК: 531.36
Determination of electrodynamic tether's characteristics for space debris deorbiting
In this paper the mathematical model of electrodynamic space tethered system was developed. Study of current intensity and tether length on the time of nonfunctioning space object deorbiting. The series of numerical experiments were performed. It was stated that increasing of the tether length or the current intensity leads to a decrease in the time of the non-functioning space object deorbiting.
Текст научной статьи Определение параметров электродинамической космической тросовой системы в задаче уборки космического мусора
С начала космической деятельности человечества количество техногенных объектов в космосе постоянно растет. В их число входят как функционирующие аппараты, так и вышедшие из строя спутники, верхние ступени ракет, различные мелкие обломки, называемые в научной литературе космическим мусором. Их взаимные столкновения могут вызвать эффект Кесслера [1], который заключается в том, что в результате лавинообразного роста числа обломков вывод новых космических аппаратов на орбиту станет невозможен. Поэтому уборка космического мусора является актуальной и важной научнотехнической задачей.
Существуют проекты, предполагающие: увод тел с орбиты с помощью импульсных лазеров [2] активных космических аппаратов, захватывающих нефункционирующий спускаемый объект с помощью троса [3-5], электродинамических тросовых систем [6], в частности стоит отметить проект, который предложил R. P. Hoyt [7]. В представленных проектах электродинамический трос изначально устанавливался на космический аппарат (КА) и разворачивался после завершения программы полета. Рассмотрим альтернативную схему, состоящую из малого КА с тросовой системой на борту, который подлетает к нефункционирующему объекту, соединяется с ним гарпуном и разворачивает трос. После этого по тросу пускается ток и, благодаря взаимодействию с магнитным полем Земли, в нем возникает сила
Ампера, направленная перпендикулярно тросу. Эту силу можно использовать для торможения космической тросовой системы (КТС) и увода с орбиты нефункционирующего объекта.
Целью работы является разработка математической модели электродинамической КТС и исследование влияния величины силы тока и длины троса на время увода нефункционирующего космического объекта с орбиты.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЭЛЕКТРОДИНАМИЧЕСКОЙ ТРОСОВОЙ
СИСТЕМЫ
Рассмотрим КТС, состоящую из КА, невесомого упругого троса и нефункционирующего объекта. КА и нефункционирующий объект представим, как материальные точки A и B соответственно (рис. 1). Будем исследовать плоское движение системы и считать, что движение происходит в плоскости экватора. Состояние
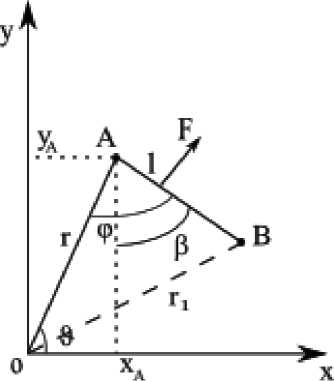
Рис. 1. Космическая тросовая система механической системы определяется четырьмя обобщенными координатами: r – расстоянием
от Земли до точки A , 1 - длиной троса, Э - углом истинной аномалии КА и ф - углом отклонения троса от местной вертикали.
дикулярен плоскости рис. 1. В этом случае модуль силы Ампера находится, как
F _ BI1
Составим уравнение движения КТС, восполь-
зовавшись формализмом Лагранжа [8]:
d (dL_ }_(L_ _ Q dt v 5qi y 5 qi 1 ’ где L _ T - P - Лагранжиан системы,
T и
Обобщенные силы найдем по формуле [8]: 5 A
Q i _ ^, q i _ ( r , Ф , 1 , S ) , (6)
5Qi где 5q - виртуальное перемещение i-ой обобщённой координаты, 5A - элементарная работа.
Запишем элементарную работу 5 A
P кинетическая и потенциальная энергия, Q _ ( Q ф ,Q r , Q s ,Q i ) -обобщенные силы.
Кинетическая энергия системы имеет вид:
t _ m A V + m B VL , (2)
где mA , mB – масса КА и нефункционирующий объект, V A _ r A , VB _ r B ; V A , VB - абсолютные скорости, r A , r B - радиус-вектора точек A и B
5 A _ 5 rF _ Fx ( 5 r cos S + r ( - sin S ) 5S + 5 1 sin в + - 5в cos в ) +
2 2 (7)
+ F y ( 5 r sin S + r 5S cos S - у cos в + 2 5в sin в )
соответственно:
( r cos S ) ( r cos S + 1 sin в )
r a = 'o’ r B =
( r Sin S ) ( r sin S - 1 cos в )
Подставляя (7)в (6) , получаем:
5 A
QT _ — _ cos S ( F cos в ) + sin S ( F sin в ).
r 5 r
Q s _ l A _- Fr cos Ф + F1 . Q ф _ l A _ FA •
5S оф 2
5 A
_ 5 1F cos — _ 0. 2
П где в _ ф---+ S (рис. 1). Подставляя (3) в (2), 2
получим выражение для кинетической энергии:
T _ m A (( r cos S )2 + ( r sin S )2) +
+ mB (( r cos Э + 1 sin в )2 + ( r sin Э - 1 cos в )2
.
Потенциальная энергия системы складывается из энергий гравитационных воздействий и упругого воздействия, обусловленного наличием троса.
P __^_^ + c ( 1 _ 1 o ) , (5)
rArB 2
где н - гравитационный параметр, 1 0 - длина троса в недеформируемом состоянии, c – жесткость троса.
Используя (4)и (5), запишем Лагранжиан системы:
L _ m A (( r cos S ) + ( r sin S )2) +
= 2
В случае, когда сила тока не изменяется в процессе движения, она все время перпендикулярна тросу и создает момент, стремящийся повернуть тросовую систему относительно ее центра масс. На половине оборота тросовой системы сила направлена противоположно направлению орбитального движения и тормозит КТС, а на половине - по направлению орбитального движения и разгоняет ее. Для того, чтобы обеспечить эффективное торможение КТС нужно исключить этап ее разгона. Это можно сделать, изменив направление тока в тросе на противоположное. В этом случае сила Ампера все время будет направлена против противоположного направления движения системы и будет тормозить. Указанное поведение может быть реализовано при использовании закона управления
F _ BI1 sign(cos ф )
mB (( r cos S + 1 sin( ф - П + S ))2 + ( r sin S - 1 cos( ф - П + Э ))2
ЧИСЛЕННЫЙ ЭКСПЕРИМЕНТ
-
H m A
r
-
^ m B- + C ( 1 - 1 o ) r 1 2
Помимо потенциальных сил упругости и натяжения троса на систему действует непотенциальная сила Ампера:
F _ B x 1 1 ,
где B - вектор магнитной индукции, I - вектор силы тока. В случае использования модели прямого диполя [9] вектор магнитной индукции направлен вдоль оси вращения Земли и перпен-
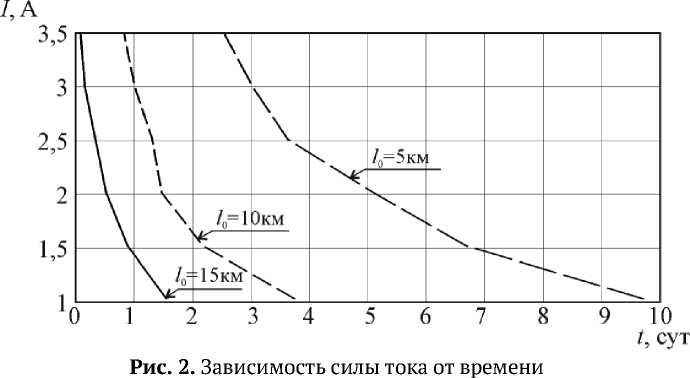
Рассмотрим движение КТС, имеющей следующие параметры: mA = 150 кг, mB = 1500 кг. Исследуем влияние длины троса и модуля силы тока на время спуска нефункционирующего объекта с орбиты. Будем считать, что: I е [1,3.5] А, 1 е [5000, 15000] км. С помощью системы (1) проведем серию численных расчетов. На рис. 2 показана зависимость силы тока от времени спуска с орбиты для КТС с разной длиной троса. Видно, что при увеличении длины троса и силы тока время спуска нефункционирующего объекта уменьшается.
ЗАКЛЮЧЕНИЕ
На основе формализма Лагранжа построена математическая модель, учитывающая взаи- 3 модействие проводящего троса с магнитным . полем Земли, и предложен закон управлением силой тока, обеспечивающий увод нефункционирующего объекта с орбиты. С помощью раз- 4. работанной модели проведена серия численных экспериментов, в ходе которой установлено, что при увеличении длины троса и силы тока время 5. увода нефункционирующего космического объекта с орбиты уменьшается.
Представленные результаты получены в рамках выполнения государственного задания Минобрнауки России №9.540.2014/К.
Список литературы Определение параметров электродинамической космической тросовой системы в задаче уборки космического мусора
- Kessler D., Cour-Palais B. Collision Frequency of Artificial Satellites: The Creation of a Debris Belt//Journal of Geophysical Research.1978. Vol.83, 2637-2646.
- Removing orbital debris with lasers/C.R. Phipps, K.L. Baker, S.B. Libby, D.A. Liedahl, S.S. Olivier, L.D. Pleasance, A. Rubenchik, J.E. Trebes, E.V. George, B. Marcovici, J.P. Reilly, M.T. Valley//Advances in Space Research. 2012. Vol.49. P. 1283-1300.Doi: DOI: 10.1016/j.asr.2012.02.003
- Aslanov V.S., Yudintsev V.V. Behavior of tethered debris with flexible appendages//Acta Astronautica. 2014. Vol. 104, № 1.pp. 91-98. Doi: DOI: 10.1016/j.actaastro.2014.07.028
- Aslanov V.S., Yudintsev V.V. Dynamics of Large Debris Connected to Space Tug by a Tether//Journal of Guidance Control, and Dynamics. 2013. Vol. 36, No. 6, pp. 1654-1660
- Ледков А.С. Управление силой тяги при буксировке космического мусора на упругом тросе//Наука и образование: электронное научно-техническое издание. 2014. №10. С. 383-397.
- Nishida S., Kawamoto S. Strategy for capturing of a tumbling space debris//Acta Astronautica. 2011. Vol. 68. №.1-2.P. 113-120. Doi: DOI: 10.1016/j.actaastro.2010.06.045
- Hoyt R.P., Barnes I.M., Voronka N.R., Slostad J.T. The terminator tape: A Cost-Effective De-Orbit Module for End-of-Life Disposal of LEO Satellites. AIAA Paper 2009-6733, Space 2009 Conference, Sept 2009.
- Маркеев А.П. Теоретическая механика. М: ЧеРо, 1999. 569 с.
- Белецкий В.В. Динамика космических тросовых систем. М.: Наука, 1990. 330 с.
