Определение параметров корректирующего устройства для системы четвертого порядка, оптимальной по быстродействию

Автор: Замятин Дмитрий Владимирович, Ловчиков Анатолий Николаевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (11), 2006 года.
Бесплатный доступ
Показана последовательность действий при формировании корректирующего звена системы на основе методики синтеза систем четвертого порядка, оптимальных по быстродействию. Рассмотрен пример формирования коррекции для импульсного стабилизатора напряжения с двухзвенным фильтром.
Короткий адрес: https://sciup.org/148175271
IDR: 148175271 | УДК: 621.31:681.5
Correctional unit parameters obtaining for time optimal four order system
It is considered the actions logicality for system correctional unit formation which based on synthesis technique of time optimal four order system. Synthesis example of correctional unit for voltage impact stabilizer with double filter is presented.
Текст научной статьи Определение параметров корректирующего устройства для системы четвертого порядка, оптимальной по быстродействию
Синтез систем высокого порядка можно проводить с помощью методики, описанной в [1], где рассмотрен стабилизатор напряжения с двухзвенным фильтром, описываемый дифференциальным уравнением четвертого порядка. Методика синтеза оптимальных по быстродействию систем высокого порядка состоит из трех основных этапов: первый этап - определение описания гиперповерхности переключения; второй этап - аппроксимация поверхности; третий этап - формирование коррекции.
На первом этапе находят описание поверхности переключения 5( e ) в виде набора точек в n-мерном фазовом пространстве координат ошибки и ее производных. Это можно сделать, решив систему дифференциальных уравнений, используя принцип обратного времени. На втором этапе по имеющимся точкам поверхности и заданному выражению для аппроксимации необходимо получить аналитическое выражение поверхности 5( e ). На третьем этапе рассматривают аналитическое выражение 5( e ), определяющее передаточную функцию устройства управления. В данной статье мы остановимся на последнем этапе.
На данном этапе методики [1], базирующейся на методе фазовых траекторий, формируется уравнение гиперповерхности переключения в координатах сигнала ошибки и ее производных в общем виде имеется выражение:
n - 1
X a i e = 0, (1) i = 0
где x. - координаты ошибки; a. - коэффициенты, полученные на втором этапе методики [1], с помощью метода наименьших квадратов.
Применительно к системе четвертого порядка получим следующее выражение:
a 0е0 + a 1 s 1 + a 2s 2 + a 3s3 = 0, (2) где e 0, e 1, e 2, e 3 - координаты ошибки, ее первой, второй и третьей производных; a0, a^ a2, a3 - коэффициенты. Коэффициент a0 удобно принять равным единице и пересчитать остальные коэффициенты.
Уравнение (2) определяет передаточную функцию устройства управления. Такой гиперповерхности переключения соответствует звено коррекции с передаточной функцией:
Wk ( p ) = a 3 • p 3 + a 2 • p 2 + a 1 • p + 1. (3)
Поскольку гиперповерхность переключения задана в координатах сигнала ошибки, то корректирующее устройство исправляет в системе сигнал ошибки (рис. 1).
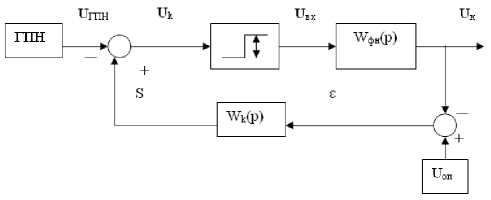
Рис. 1. Структурная схема стабилизатора с коррекцией: e - сигнал ошибки; 5 - сигнал с корректирующего устройства; U - пилообразный сигнал с генератора пилообразного напряжения; Uk - напряжение на ключ; Свх - управляющее напряжение; Un - напряжение нагрузки; U - опорное напряжение
Передаточная функция звена коррекции (3) заставляет систему работать нужным образом лишь теоретически. Но на практике реализация передаточной функции только третьего порядка в числителе не применяется из-за того, что в реальной системе всегда присутствуют различные сигналы шума.
В большинстве случаев сигнал шума - это сигнал с маленькой амплитудой, но с очень большой частотой. Его можно описать следующим выражением:
U ш = A n sin( w ш t ), (4) где U - сигнал шума, В; Л - амплитуда сигнала шума, В; wш - частота сигнала шума, Гц; t - время, с.
Амплитуда сигнала шума Лш мала: Лш = 10 9 В, в то время как его частота w очень велика: w = 109 В.
Сигнал ошибки е будет складываться из суммы полезного сигнала и сигнала шума:
s = U „ + U ш , (5)
где U - полезный сигнал, В.
Если осуществить в системе реализацию корректирующего устройства с передаточной функцией только третьего порядка в числителе, то сигнал ошибки будет продифференцирован три раза:
s ' = U п ” + 4 п w ш COs( w n t ), (6) где s ' - производная сигнала ошибки; U' - производная полезного сигнала; U Ш - производная сигнала шума.
После нахождения уже первой производной сигнала ошибки амплитуда помех значительно возрастает - примерно до 1 В.
Для второй и третьей производной сигнала ошибки имеем следующие выражения:
S ” = U П + A n w ш w ш sin( w n t ), (7)
s* = U П"+ A n w ш W n w mcos ( W n t X (8)
где s' - вторая производная сигнала ошибки; U П - вторая производная полезного сигнала; U Ш - вторая производная сигнала шума; s" - третья производная сигнала ошибки; U” - третья производная полезного сигнала; U ш - третья производная сигнала шума.
По выражению (8) следует, что в системе в значительной степени увеличилась амплитуда сигнала шума.
Таким образом, при дифференцировании сигнала шума из-за его высокой частоты уровень его сигнала ста новится соизмеримым с полезным сигналом, что в итоге приводит к неработоспособности системы в целом.
Для преодоления этого недостатка необходимо изменить корректирующую передаточную функцию, чтобы исключить дифференцирование на высоких частотах, при этом оставив дифференцирование для частот, которые определяют основной переходной процесс. Поэтому реализуем звено коррекции с передаточной функцией:
W k ( Р ) =
a 3 • p 3 + a 2 • p 2 + а 1 • p + 1 b3 • p 3 + b 2 • p 2 + b 1 • p + 1
Это интегрально-дифференциальное звено третьего порядка в числителе и знаменателе, и как необходимо подобрать коэффициенты ЬЗ, Ь2, Ь1 в знаменателе. Для этого выполним следующие действия:
-
1. Вычислим специальный коэффициент для числителя. Возьмем коэффициент аЗ и извлечем из него кубический корень:
-
2. Выберем специальный коэффициент знаменателя
a 3 T = 3[а 3 , (10)
где аЗ г - специальный коэффициент числителя.
меньше минимум в тридцать раз:
b 3Т = a 3 T ,
T 30...100
где ЬЗ Г - специальный коэффициент знаменателя.
-
З. Пусть знаменатель состоит из трех звеньев первого порядка
( b 3 Tp + 1)( b 3 Tp + 1)( b 3 Tp + 1). (12)
Перемножим скобки и получим полином в знаменателе:
b 3 • p 3 + b 2 • p 2 + b 1 • p + 1. (1З)
Сравнение звеньев с передаточной функцией (З) и (9) в общем виде можно представить графически (рис. 2).
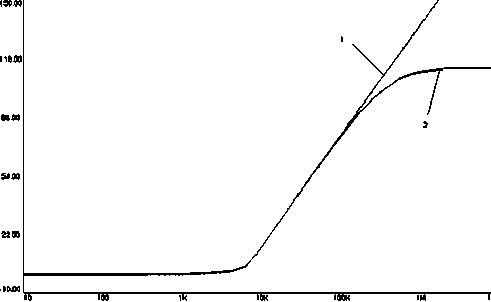
Рис. 2. Логарифмические амплитудно-частотные характеристики звеньев: 1 - с передаточной функцией (З);
2 - с передаточной функцией (З)
Таким образом, нами была сформирована передаточная функция звена коррекции, фильтрующая помехи на высоких частотах и придающая системе оптимальность по быстродействию. Формирование знаменателя в виде полинома, который можно представить из трех последо вательно соединенных звеньев первого порядка, значительно упрощает практическую реализацию корректирующего звена, например, на операционных усилителях.
Покажем, что указанное соотношение специальных коэффициентов числителя и знаменателя верно. Для этого рассмотрим пример, данный в [1], и будем варьировать соотношение коэффициентов.
Передаточная функция объекта управления
W 0У ( p ) = 1,540 " 17 • p 4 + 5,930 '■ • p 3 + 4,503 • 10 - 8 • p2 + 1,135 • 10 - 4 • p + 15,03' (14)
Общий вид звена коррекции в рассматриваемом примере следующий:
2,705 -W14 • p 3 + 2,704 - 10 " 9 • p 2 + 9,00640 • p + 1
W oy ( p ) = J 3 J 2 J 1 • (15)
b 3 • p 3 + b 2 • p 2 + b • p + 1
Выберем разные варианты знаменателя звена коррекции. Известно, что для системы второго порядка, оптимальной по быстродействию, специальные коэффициенты числителя и знаменателя отличаются в 10...20 раз [2]. Поэтому начнем именно с этого соотношения.
Сформируем звенья коррекции для различных соотношений специальных коэффициентов:
а 3 T = W ( ) = 2,705•Ю - 14 • p 3 + 2,704•Ю - 9 • p2 + 9,006 • 10 - 5 • p + 1
-
1) b 3 T~ ’ k p ~3,382 • 10 - 18 • p 3 + 6,759 •Ю - 12 • p2 + 4,503 •Ю - 6 • p + 1;
а 3 T = 2,705•Ю - 14 • p 3 + 2,70440 9 • p 2 + 9,00640 • p + 1
-
2) b 3 T ’ k ( p ) = 1,003 • 10 - 18 • p 3 + 3,006 40 - 12 • p 2 + 3,003•Ю - 6 • p + 1;
а 3 T = W ( ) = 2,705•Ю - 14 • p 3 + 2,70440 9 • p2 + 9,006 40 • p + 1
-
З) b 3 T~ ’ k ( p ) = 1,252 •Ю - 19 • p 3 + 7,509 •Ю - 13 • p 2 + 1,501 • 10 - 6 • p + 1;
-
., а 3 T = 100 W ( ) = 2,705 • 10 - 14 • p3 + 2,70440 - 9 • p 2 + 9,00640 - 5 • p + 1
V b 3 T ’ k( p 2,70540 - 20 • p 3 + 2,70440 - 13 • p 2 + 9,006 • 10 - 7 • p + 1;
-
, а 3 T = 150 W 2,705 • 10 - 14 • p 3 + 2,704 • 10 - 9 • p 2 + 9,006 • 10 - 5 • p + 1
-
5) b 3 T” ’ k ( p ) = 8,012 • 10 - 21 • p 3 + 1,201 • 10 - l3 • p2 + 6,003 • 10 - 7 • p + 1'
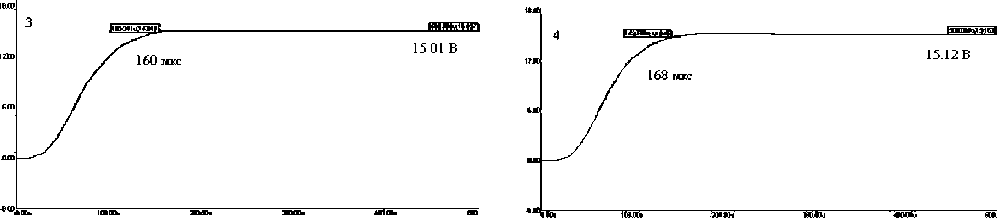
Этим вариантам соответствуют графики переходных процессов (рис. 3,4 и 5):
На основе анализа этих графиков сформулируем следующие выводы. Переходной процесс в системе четвертого порядка является оптимальным по быстродействию и имеет малое перерегулирование для третьего и четвертого вариантов (см. рис. 4). Наилучшим из них является третий вариант, который имеет меньшую статическую ошибку. В этом варианте отношение специальных коэф фициентов числителя и знаменателя равно 60. Следует отметить, что при крайних соотношениях специальных коэффициентов из интервала 30...150 параметры переходного процесса ухудшаются. Поэтому рекомендуется выбирать соотношение из интервала 50...70. Время регулирования, достигнутое в этом примере для стабилизатора напряжения с двухзвенным фильтром, равно 160 мкс.
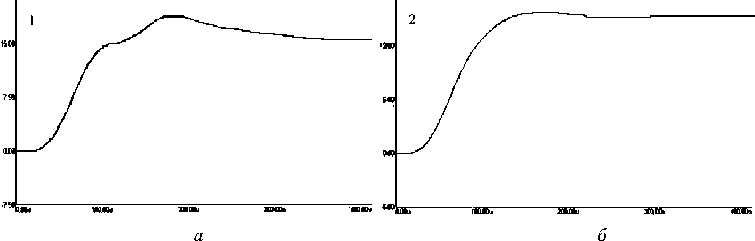
Рис. 3. Первый (а) и второй (б) варианты переходных процессов
б
Рис. 4. Третий (а) и четвертый (б) варианты переходных процессов
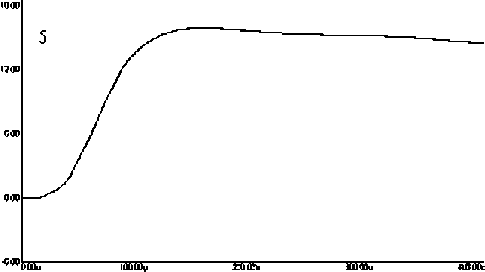
Рис. 5. Пятый вариант переходного процесса
Таким образом, предложенная в данной статье последовательность действий для формирования корректирующего звена системы четвертого порядка позволяет получить гарантированный результат при высоких показателях качества переходного процесса и простой практической реализации.
