Определение скорости космического аппарата в негеостационарных системах персональной спутниковой связи

Автор: М.С. Цимбал
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 4, 2018 года.
Бесплатный доступ
Измерение характеристик движения космического аппарата является важнейшей задачей для обеспечения функционирования любой спутниковой системы. На основании полученных координат и составляющих вектора скорости производится определение орбиты космического аппарата и прогнозирование его движения, необходимое для организации сеансов управления и связи. Однако, по причине неполной детерминированности орбиты из-за влияния гравитационных аномалий, сопротивления среды и других возмущающих сил, это прогнозирование нуждается в постоянном уточнении. Определение траекторных параметров космических аппаратов традиционно осуществляется с использованием измерительных каналов радиотехнических систем с активным ответом, совмещенных с каналами передачи телеметрической и командной информации, с помощью средств наземного комплекса управления с привлечением специализированных командно-измерительных систем, комплексов и баллистического центра. Также известны способы траекторных измерений космического аппарата с применением глобальных навигационных спутниковых систем, что предполагает наличие на борту аппаратуры приема навигационных сигналов. Вместе с тем для существующих и перспективных космических систем различного назначения все более актуальным становится расширение областей автономного функционирования. В статье рассмотрен способ определения скорости движения негеостационарного космического аппарата с многолучевой антенной системой без использования наземных измерительных средств. Проведена оценка погрешностей вектора скорости для метода непосредственного измерения радиальных скоростей объекта. Предложены меры по повышению точности определения скорости движения космического аппарата с использованием информации о местонахождении абонента.
Эффект Доплера, доплеровский сдвиг, скорость космического аппарата, персональная спутниковая связь
Короткий адрес: https://sciup.org/14114728
IDR: 14114728 | УДК: 621.396.946 | DOI: 10.26732/2618-7957-2018-4-198-203
Spacecraft velocity determination in nongeostationary mobile satellite communications
Measuring the motion characteristics of a spacecraft is the most important task in the operation of any satellite system. Based on the obtained coordinates and components of the velocity vector, the orbit of the spacecraft is determined and its motion predicted, which is necessary for organizing control and communications. However, due to the incomplete determinism of the orbit due to the influence of gravitational anomalies, the resistance of the medium and other disturbing forces, this prediction needs constant refinement. Trajectory parameters of spacecraft are traditionally determined using measuring channels of radio engineering systems with an active response, combined with telemetry and command information transmission channels, using ground-based control complex with the involvement of specialized command and measurement systems, command-measuring complexes and a ballistic center. Also known are methods for trajectory measurements of a spacecraft using global navigation satellite systems, which presupposes the presence on board of the equipment for receiving navigation signals. At the same time, for existing and prospective space systems for various purposes, it is becoming increasingly important to expand the areas of autonomous operation. The article describes a method for determining the velocity of a non-geostationary spacecraft with a multibeam antenna system without using ground-based measuring instruments. The estimation of errors of the velocity vector for the method of direct measurement of the radial velocities of the object. Proposed measures to improve the accuracy of determining the velocity of the spacecraft using information about the location of the subscriber.
Текст статьи Определение скорости космического аппарата в негеостационарных системах персональной спутниковой связи
В общем случае точность определения положения и скорости объекта в пространстве зависит от комбинации типов используемых измерителей, ошибок измерений и расположения средств измерений относительно объекта [1–4]. Так, известно, что наибольшая точность метода определения вектора скорости в пространстве, основанного на непосредственном способе измерениях трех радиальных скоростей объекта, достигается при таком взаимном расположении трех измерительных станций, при котором расстояния a (базы) между
станциями равны, то есть образуют равносторонний треугольник с отношением базы к высоте пирамиды равным [5]:
h / a = 1 = 0, 408.
6,
Используя данное отношение применительно к существующим космическим системам, использующим разные типы орбит, можно оценить расстояние между измерителями, обеспечивающее наибольшую точность метода (табл. 1).
Из табл. 1 следует, что только для спутниковых систем на низкой круговой орбите возможна конфигурация с оптимальным расположением измерителей в пределах размеров земной поверхности. Данный тип орбит широко используется современными системами персональной спутниковой связи (Iridium, Globalstar), основу которых составляют КА с многолучевой антенной системой на базе активных фазированных решеток. Такие антенные системы позволяют организовать на земной поверхности зону обслуживания диаметром 4600–5800 км, образованную независимыми лучами, число которых в случае системы Iridium достигает 48. При этом эквивалентная ширина диаграммы направленности (ДН) каждого луча
Таблица 1
Оптимальные расстояния между измерителями для различных спутниковых систем
Учитывая эти особенности, представляется возможным определять скорость движения космического аппарата бортовыми средствами в реальном масштабе времени путем проведения одновременных измерений доплеровских сдвигов частот сигналов в разнесенных абонентских каналах.
Из теории и практики применения многолучевых доплеровских измерителей вектора скорости известно, что при горизонтальном полете возможно определение вектора скорости летатель- ного аппарата с проведением измерения частоты Доплера по двум лучам [6]. Данный способ можно считать приемлемым для задачи измерения вектора скорости КА, пренебрегая крайне незначительными изменениями его вертикальной составляющей (рис. 1).
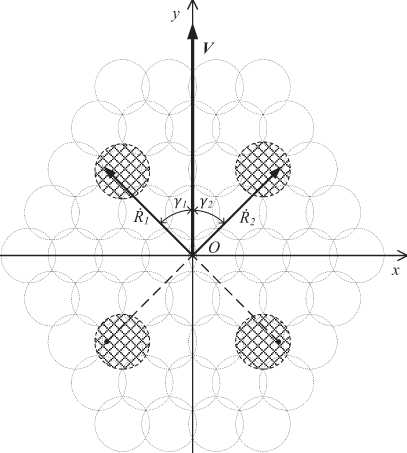
Рис. 1. Направления измерения доплеровских частот сигнала для КА с многолучевой антенной
Для V -расположения лучей, характеризующимся равенством углов γ 1 = γ 2, составляющие Vx , Vy определяются следующим образом:
у _ А0 , fd 1 + fd 2 у = - Л , fd 1 - fd 2
x 4 cos y y 4 sin y где λ0 – длина волны излучаемого сигнала; fd1, fd2 – измеренные доплеровские частоты; γ1, γ2 – углы направления измерений.
Проведем потенциальную оценку точности определения скорости движения КА предлагаемым способом с учетом влияния возможных ошибок.
Учет возможных ошибок определения вектора скорости
При оценке точности определения вектора скорости в пространстве необходимо найти связь между составляющими вектора ошибки δ V и тремя компонентами вектора скорости объекта V , измеряемыми радиотехническими методами [7; 8].
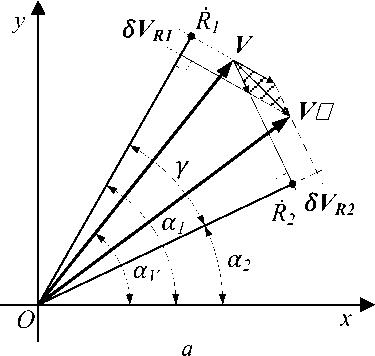
Применительно к задаче определения скорости космического аппарата будем считать, что его перемещение осуществляется только в горизонтальном направлении ( Vz = 0) и задача сводится к поиску значения и направления вектора скорости V на плоскости. Так, расчетное значение вектора скорости будет определяться точкой пересечения прямых, перпендикулярных двум радиальным составляющим R 1 и R 2 (рис. 1). Направления вектора скорости V и радиальные направления задаются относительно одной из координатных осей углами αV и αR 1, αR 2. При этом имеющиеся ошибки измерения радиальных скоростей δ R 1 и δ R 2 ведут к возникновению погрешности полученного значения вектора скорости, который определяется отрезком OV ʹ (рис. 2a).
-
Том 2
Рассмотрев параллелограмм ошибок вектора скорости VAV ʹ B, можно найти проекции вектора ошибки VV ʹ на координатные оси δVx и δVy , которые составляют:
|
5V x |
5Vm ( = R 1 cos 1 Sin Y ^ |
n 1 3VR2 ( « 2 1 R 2 cos 1 2 ) sin y |
n a + 1 2 |
|
5 V y |
5VRv ■ ( = R 1 sin 1 Sin Y |
2 n ) 8V « 2 J+ ■ R 2 sin 1 v 2 ) Sin Y |
П a +— 1 2 |
,
Таким образом, линейная ошибка в направлении соответствующей стороны параллелограмма ошибок увеличивается в 1/sin γ раз. С учетом этого фактора выражения (1) для ошибок в направлении осей X и Y примут вид:
3VR,+ VЗа (
3VX = —-—-—1 cos I а sin у V
п
—
.
Кроме этих ошибок, обусловленных неточным измерением величин радиальных составля- 200 ющих, на результирующую точность определения вектора скорости также оказывают влияние ошибки, обусловленные неточным определением направления на объект (рис. 2б). При этом ошибки определения угла приводят к отклонению линии направления VR на угол δα и возникновению линейной ошибки, которая составляет:
V ∙sin( αV – α ) δα = Vt δα , где Vt – тангенциальная составляющая вектора скорости.
3V, + V За ( п
—R2—t—- cos I а + -sin y V -
8Vy =
sin y
8V„ 2 + V 8a
R 2 t 2
sin y
■ ( . n)
sin a +
( 1 2)
к
+
Оценка точности определения скорости КА
Проведем оценку влияния ошибок измерения радиальных скоростей в двух, выбранных
симметрично относительно вектора движения КА, направлениях (рис. 3).
С учетом симметричности выражения (2)
принимают вид:
5V x
3VR + V sin( a - a^)3a sin y
• cos I a
3 Vy
П) / . П)
- cos a +
2) I 1 2 J.
3VR + V sin(a7 - a^)3a sin y
sin I a
П Y ■ < . П)
— + sin a +—
2) I 1 2)
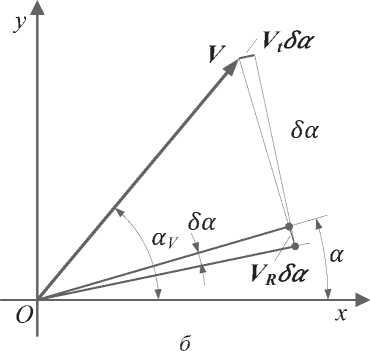
Рис. 2. Ошибки при измерении радиальной составляющей ( a ) и определении направления на объект ( б )
Результаты оценки точности измерения радиальных составляющих, в зависимости от угла γ между направлениями, представлены на рис. 4. При расчетах погрешность измерения радиальных составляющих, обусловленная аппаратурной погрешностью и средой распространения сигнала, принималась равной δVR 1 = δVR 2 = 1 %, а ошибка направления – равной ширине диаграммы направленности δα = ±10°.
Полученные графики на рис. 4 показывают, что наибольшая точность определения скорости (по обеим осям) соответствует случаю, когда радиус-векторы пересекаются под прямым углом. При этом значительную долю погрешностей вносит ошибка, обусловленная неточностью измерения направления, которая имеет тенденцию к снижению при уменьшении угла между направлением измерения и истинным направлением векто-
ра скорости КА. Относительно высокое значение погрешности обусловлено неопределенностью местоположения абонента внутри зоны обслуживания, формируемой шириной луча.
Рис. 3. Составляющие скорости движения КА с учетом возможных ошибок
На рис. 5 представлен график, отражающий вклад ошибки определения направления измерения в общую ошибку определения вектора скорости, по которому можно оценить возможность повышения точности для данного способа. Из графика следует, что для снижения результирую- щей ошибки, вызванной неточным определением направления, до уровня принятой ошибки измерения радиальной составляющей, необходимо обеспечить погрешность определения направления измерения не более 0,4°.
Снижение этой неопределенности до столь малых значений путем уменьшения ширины ДН лучей представляется нецелесообразным, поскольку такой подход потребует многократного увеличения апертуры антенной системы. Наиболее привлекательным способом выглядит использование данных о местонахождении задействованного абонентского терминала. Так, в рассматриваемых спутниковых системах предусмотрено предоставление услуг по определению местоположения абонента автономными средствами, где при однократном измерении точность определения местоположения может достигать ±1,6 км [9; 10]. Использование этой информации, переданной на борт КА по служебному каналу, позволит значительно сократить (~ в 200 раз) неопределенность направления доплеровского измерения δα внутри луча до уровня 0,12°, и получить, таким образом, ошибку направления измерения порядка 0,3 %, что не превышает принятого значения ошибки измерения радиальной составляющей.
Дальнейшее снижение погрешности определения скорости КА рассматриваемым способом возможно с использованием глобальных навигационных систем (GPS, ГЛОНАСС ), что позволит получить более точные данные о местоположении абонента и, как следствие, свести к минимуму ошибку, вызванную неточным измерением радиальной составляющей.
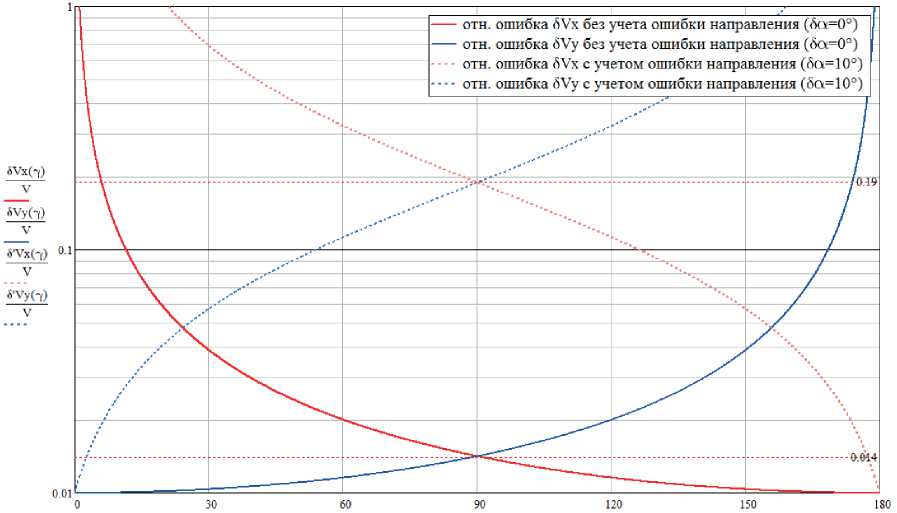
Рис. 4. Зависимость ошибок составляющих вектора скорости от угла между направлениями измерений
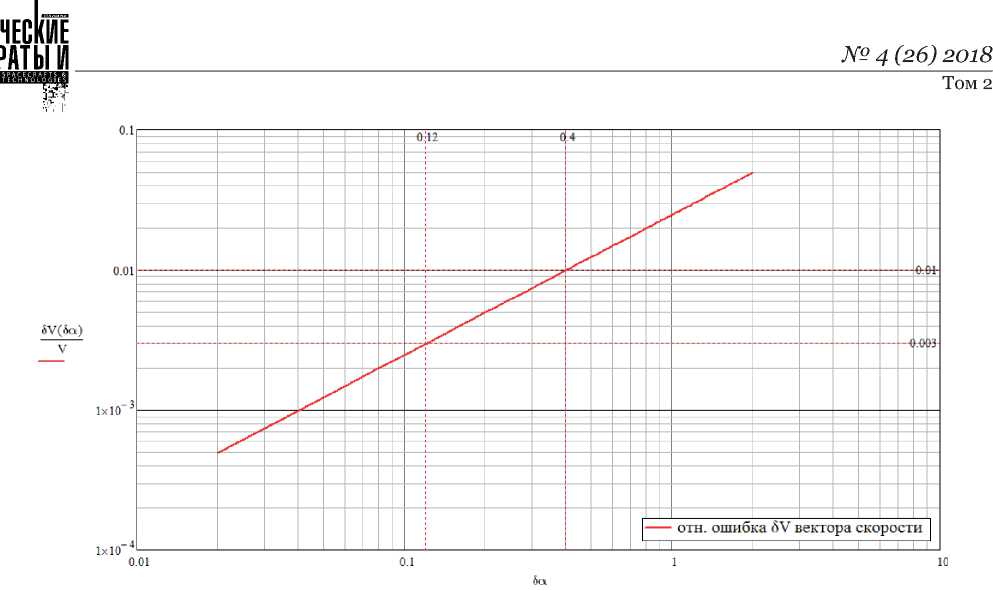
Рис. 5. Зависимость относительной ошибки вектора скорости от неопределенности направления измерения
Заключение
Проведена предварительная оценка достижимой точности определения скорости негеостационарного космического аппарата с использованием многолучевой антенной системы.
С помощью построенных зависимостей показано, что на результирующую точность определения вектора скорости КА преимущественное влияние оказывают ошибки, обусловленные неточным определением направления КА–абонент.
Получены оценки, подтверждающие, что действенной мерой для снижения погрешности, вызванной неопределенностью положения источника излучения доплеровского сигнала, может оказаться использование информации о местоположении абонента.
Список литературы Определение скорости космического аппарата в негеостационарных системах персональной спутниковой связи
- Дудко Б. П. Космические радиотехнические системы : учеб. пособие. Томск : Томск. гос. ун-т систем упр. и радиоэлектроники, 2012. 291 с.
- Тузов Г. И. Выделение и обработка информации в допплеровских системах. М. : Сов. радио, 1967. 256 с.
- Горчаковский А. А., Евстратько В. В., Мишуров А. В., Панько С. П., Рябушкин С. А., Сухотин В. В., Шатров В. А. Задачи и пути их решения в процессе создания командно-измерительных систем космических аппаратов // Исследования наукограда. 2015. № 4. С. 6–9.
- Лысенко Л. Н., Бетанов В. В. Принципы и основные и основные направления совершенствования наземного автоматизированного комплекса управления космическими полетами // Вестник МГТУ им. Н. Э. Баумана. Сер. «Машиностроение». 2011. № 1. C. 17–30.
- Агаджанов П. А., Барабанов Н. М., Буренин Н. И. Космические траекторные измерения. Радиотехнические методы измерений и математическая обработка данных. М. : Сов. радио, 1969. 504 с.
- Дятлов А. П. Системы спутниковой связи с подвижными объектами : учеб. пособие. Ч.1. Таганрог : ТРТУ, 2004. 95 с.
- Камнев В. Е., Черкасов В. В., Чечин Г. В. Спутниковые сети связи. М. : Военный парад, 2010. 608 с.
- Колчинский В. Е., Мондуровский И. А., Константиновский М. И. Автономные допплеровские устройства и системы навигации летательных аппаратов. М. : Сов. радио, 1975. 432 с.
- Шебшаевич В. С., Дмитриев П. П., Иванцевич Н. В. Сетевые спутниковые навигационные системы. М. : Радио и связь, 1986. 408 с.
- Сильверстов С. Д. Точность измерения космических аппаратов радиотехническими методами. М. : Сов. радио, 1970. 319 с.
