Определение скоростных параметров космических аппаратов по измерениям в ретрансляционных системах

Автор: Чаплинский Владимир Степанович, Жуков Александр Олегович, Гладышев Анатолий Иванович, Лысенко Сергей Николаевич, Суровцева Ирина Вячеславовна
Рубрика: Математическое моделирование
Статья в выпуске: 3, 2019 года.
Бесплатный доступ
Рассматривается определение скоростных параметров космического аппарата (КА) - абонента космической системы ретрансляции по доплеровским измерениям, проводимым в запросном режиме, в предположении, что несущая частота сигнала ответа с КА когерентна частоте принимаемого на КА сигнала запроса, а на спутнике-ретрансляторе несущие частоты радиолиний формируются посредством гетеродинирования принимаемых сигналов и сигнала собственного задающего генератора
Космический аппарат, спутник-ретранслятор, космическая система ретрансляции, измерения навигационных параметров, доплеровское смещение частоты сигнала, интерпретация доплеровских измерений, навигационный контроль
Короткий адрес: https://sciup.org/148309039
IDR: 148309039 | УДК: 621.396 | DOI: 10.25586/RNU.V9187.19.03.P.017
Determination of speed parameters of space vehicles by measurements in retiring systems
The determination of the speed parameters of a spacecraft (SC) - a subscriber of a space relay system based on Doppler measurements performed in interrogation mode is considered under the assumption that the carrier frequency of the response signal from the SC is coherent to the frequency of the request signal received by the SC, and the carrier frequencies of radio links are formed on the repeater satellite by heterodyning the received signals and the signal of its own master oscillator
Текст научной статьи Определение скоростных параметров космических аппаратов по измерениям в ретрансляционных системах
В космических системах ретрансляции (КСР), наряду с передачей телеметрической, командно-программной и служебной информации, могут проводиться измерения текущих навигационных параметров (ИТНП) космических аппаратов (КА) – абонентов КСР и самих спутников – ретрансляторов. При этом может быть существенно сокращен интервал прогнозирования параметров движения КА-абонентов и соответственно уменьшены погрешности знания данных параметров на момент решения целевых задач или проведения динамических операций [1; 2].
* Статья подготовлена при финансовой поддержке гранта Президента Российской Федерации, проект № МД-4052.2018.8 «Методы получения и обработки внеатмосферной информации для обнаружения и идентификации космических объектов в широком спектральном диапазоне».
18 в ыпуск 3/2019
Точностные показатели орбитальных определений по ретрансляционным измерениям через один спутник-ретранслятор сопоставимы с получаемыми многопунктным наземным комплексом по многовитковым измерениям непосредственно в зоне видимости КА с наземных пунктов. В случае проведения измерений через два СР, существенно разнесенных по долготе, возможен оперативный контроль динамических операций с КА-або-нентом. Таким образом, контроль параметров движения КА в КСР позволяет получить приемлемую точность без ограничений, присущих наземному измерительному комплексу. Для низкоорбитальных КА, оснащаемых навигационной аппаратурой потребителей космических навигационных систем, ретрансляционные измерения могут использоваться в резервном контуре траекторного контроля [3].
Технически обеспечение траекторного контроля КА-абонентов незначительно усложняет КСР. Ретрансляционные скоростные измерения по доплеровскому смещению несущих частот в радиолиниях вообще не сказываются на информационном обмене с КА. Вследствие относительно высокой информативности скоростных измерений низкоорбитальных КА-абонентов дальномерный режим может рассматриваться как дополнительный, проводимый в основном для уточнения положения СР [4].
Интерпретация доплеровских измерений в космических ретрансляционных системах и определение по этим измерениям скоростных параметров движения КА-абонентов имеет ряд особенностей.
Рассмотрим ретрансляционную измерительную систему (рис.), в которой наземный передающий пункт (н1) в текущий момент времени t н1 излучает сигнал запроса, спутник-ретранслятор (Р) в момент t р1 ретранслирует сигнал запроса на космический аппарат (К), принятый на КА сигнал переизлучается в момент t к (сигнал ответа), сигнал ответа ретранслируется спутником-ретранслятором в момент t р2 и принимается наземным приемным пунктом (н2) в момент t н2.
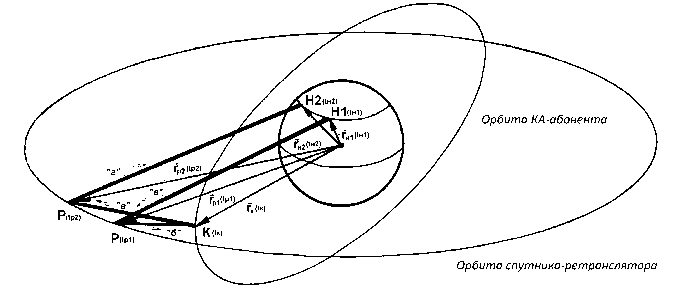
Схема распространения сигнала в радиолиниях космической системы ретрансляции
Положим, что на спутнике-ретрансляторе несущие частоты радиолиний Р → КА и Р → н2 формируются посредством гетеродинирования принимаемых сигналов и сигнала собственного задающего генератора, а несущая сигнала ответа КА когерентна частоте принимаемого КА сигнала. Обозначим частоту излучаемого с н1 сигнала запроса через
Чаплинский В.С. и др. Определение скоростных параметров... 19
ω = а ω . Переизлучаемый спутником-ретранслятором Р в момент t в сторону КА сигнал будет иметь частоту
ωр1(t) = ан1ωонАа(t) – вр1ωор(tр1), где А (t) – обобщенный функционал доплеровского и релятивистского преобразования сигнала в радиолинии «а» (н1 → Р), учитывающий также смещение частоты из-за распространения сигнала в тропосфере и ионосфере;
ωон и ωор – эталонная частота задающего генератора (ЗГ) наземной станции и частота ЗГ спутника-ретранслятора в моменты t н1 и t р1 соответственно;
ан1 и вр1 – коэффициенты преобразования частот ЗГ наземной станции и спутника-ретранслятора при формировании несущих сигналов в радиолинии «а» и радиолинии «б» (Р → КА).
Принятый на КА сигнал переизлучается с несущей
ωк(t) = lан1ωон Ааб(t) – lвр1ωор(tр1)Аб(t), где l – коэффициент когерентного преобразования частоты;
Ааб( t ) и Аб( t ) – обобщенный функционал преобразования сигнала в радиолиниях «аб» (н1 → Р → КА) и в радиолинии «б» соответственно принимается спутником-ретранслятором в момент t р2 и pетpaнслиpуeтся с несущей
ωр2(t) = вр2ωор(tр2) + lан1ωон Аабв(t) – lвр1ωор(tр1)Абв(t), где в – коэффициент преобразования частоты ЗГ ретранслятора при формировании несущей радиолинии «г» (Р → н2);
Аабв( t ) и Абв( t ) – обобщенный функционал преобразования сигнала в радиолиниях «абв» (н1 → Р → КA → Р) и в радиолиниях «бв» (Р → КA → Р) соответственно.
Наземный приемный пункт будет иметь на входе ретранслированный сигнал ответа с несущей ωн2/р( t ) = вр2ωор( t р2)Аг( t ) – l ан1ωонАабвг( t ) + l вр1ωор( t р1)Абвг( t ), где Аг( t ), Аабвг( t ) и А ( t ) – обобщенный функционал преобразования сигнала в радиолинии «г», радиолиниях «абвг» (н1 → Р → КA → Р → н2) и радиолиниях «бвг»(Р → КA → Р → н2) соответственно.
На приемном пункте н2 производится измерение смещения частоты принятого сигнала от опорного. Частота опорного сигнала ωн2 = ан2ωон, где ан2 – коэффициент преобразования. Мерный интервал T н2 формируется от ЗГ наземной станции.
Результат измерения:
t н2н + Т н2
N - / tн2н
^ н2 ^ н2/ Р ( t ) d тн2 = ан2 ^ он Т н2 ( 1 а2Аабвг )
—
в р2
а н2 ω он Т н2
t н2н + Т н2
I tн 2 н
^ ор ( t р 2 ) А г ( t ) d Т н2 —
в р1 а н2 ω он Т н2
t н2н + Т н2
I tн2н
ω ор ( t р1 )А бвг ( t )dτ н2
где t н2н – фиксируемый момент начала мерного интервала;
t н2н + Т н2
А абвг = А абвг ( t )d тн2
Т н2
Выпуск 3/2019
является функцией отношения частот, несущих навигационную информацию, и, кроме того, содержит неопределенность, обусловленную реальным отличием частоты ЗГ ретранслятора в текущие моменты tр1 и tр2 от частоты ЗГ наземного пункта. Положим, что для ослабления влияния неопределенности частоты задающего генepaтopа спутника-ретранслятора с него излучается пилот-сигнал с частотой Шр(t) = аn«Op(t), где ап -коэффициент преобразования, который принимается наземным пунктом н2. На пункте н2 в общем случае производится измерение отклонения частоты принятого пилот-сиг- нала от опорного, сформированного от задающего генератора наземного пункта, на мерном интервале [ t н2н, t н2н+тн2 ] и мерном интервале [ t н2н - тбв, tн2н - Тбв + Т^ ], где тбв = tр2 - tpl,
t н2н + Т н2
N пс1= J tн2н
а п ^ он
апшор( t p2)Ar( t ) d тн2 ,
t н2н Тбв + Тн2
N пс2 = f t н2н — Тбв
апшон
апωор( t p2K ( t ) | d ТН 2 .
Отсчеты N пс1 и N пс2 используются совместно с результатами измерений N для определения навигационного параметра. Выразим (1) через навигационные величины. Период колебаний принятого сигнала по собственному времени приемного пункта δτн2 и координатному времени δ t н2 связан формулой
^ Т н 1 =[ 1 R h 1 ( t H 1 ) ] £ t H 1 ,
^1( t н1 ) фн1( t н1 )
где R н1( t н1 ) = --- 2 .
2 с с
Момент приема на пункте н2 сигнала ответа t н2 является функцией момента излучения с пункта н1 сигнала запроса t н1, так что
δ t н2 = dt н2 δ t н1 . dt н1
С учетом (5)–(7)
д _ ЫонАабвг( t ) _ St h1 _ 1- R н1( t н1 ) 8 t H 1
А абВ г " он 8 Т н2 I - К н2 ( t н2 ) S t H 2 .
Производную н1 найдем из операционного времени распространения сигнала dt н2
t н2
—
t н1 = 1 [ ( L а + L б + L в + L г ) ] ,
где с – скорость распространения радиоволн в свободном пространстве.
Тогда
= 1 — ^ н!
абвг 1 — r
—
1 — R hi
c
Z L i , i
Чаплинский В.С. и др. Определение скоростных параметров...
где Rн1 и Rн2 – некоторые значения функций Rн1(tн1) и Rн2(tн2), принадлежащие мерному интервалу Tн2:
t h2+T н2
L i = I1" J ^TH2.
T н 2 τ н2
t н2н
С погрешностью в определяемой суммарной скорости не более 10–5 м/с для призем- ной области можно принять
А абвг =1 - 1 [ ( L а + L6 + L в + L г ) ] .
Формула (12) дает связь суммарного скоростного навигационного параметра ∑ Li со значением A абвг , функцией которого является непосредственное измерение. Среднее н а мерном интервале значение суммарного скоростного навигационного параметра ∑ Li
выражается через приращение суммарной дальности _ t h2 + T „2
i
^ L i = t н2
J dd" L . ( t pl. t Hi ) + L б ( t k ,t pl ) + L . ( t p2 , t k ) + L г ( t н2 , ‘ р2 > d Т н. 13
t н2н
н2
Проведя аналогичные преобразования, получим
А бвг = 1 - С [ L 6 + L в + L г ] ;
A r( t ) = 1 - C L r( t ).
Получим соотношения связи результатов измерений с навигационным параметром. Используя (10), (13)–(14), запишем (1) в виде

N _ 1 + 1 ан1 - 1 ан1 1
ан2 ωонTн 2 ан2 ан2 с tн2н +Т н2
--р^Г- J wop( tp 1)A rd Th 2H р"1 ^L + ан2“онТн2 ор р2 г Н2 ан2 с I ^ q I
k q 7
tн2н tн2н +Tн2
+Y1 - а -^ РТН1 ^ “оР(tР1)]1 -7L(t)| ^Тн2, н2 он н2
t н2н
-
1 вр1 11Т I
где q = б, в; Y 1 = ан^^ I X 1- q .
-
н V q 7
Из (3) следует, что t н2н + Тн2
N
J « ор( t pl)Ar(t)d тн2 = “ он Т н2 а . (17)
t н2н
Полученное значение (17) может непосредственно заменить первый интеграл в правой части выражения (16). С учетом (16) интерпретируем отсчет (4):
^ пс2 а п “ он Т н2 а п I 2 ,
|
где |
_ t н2н Тбв + Т н2 I 2 = “ ор1 Т н2 - “ ор1 "TL( ^ г); Ь*г = Т^ J [ L г ( 1 ) ] d Т н2 . (19) t н2н - Тбв |
22 в ыпуск 3/2019
Представим
t н2н + Тн2 где Lг = ТНГ J tн2н
L г ( t )
l ; = ( L г ) -A L г ,
d тн2 ; ^L г — ( L г ) ( L г ) .
Подставим (20) в (19). Тогда
1 2 - ^ ор Т н2. Д L г = ^ор1 Т Н 2 - „ор1 Т н^ ( L г ) .
С другой стороны, второй интеграл в правой части выражения (16)
t н2н + Тн2 ) t н2н
" ор( t pl ) ! 1 - 1 [ L г( t ) ] } d тн2 =" ор1 Т н2 - " ор1 Т Т" ( L г )
равен выражению (21). Следовательно,
I 2 -
ω ор1 Т н 2 с
A L г = ( « он Т н2 -
N
пс2
а
п
)
^р ' "' A L г. с г
Выполнив замены в (16) интегралов через результаты измерения пилот-сигнала (17) и
(22), получим
--N^ = 1 + ^ан- - ^ан111 X Ье |+М —N^--1) + i н2 он н2 н2 н2 н2 п он н2
i
+ l B pl l [у L |+ 1 Вр1 N пс2
ан2 с I X q I ан2 ( ап“» Т21 \ q 7
- 1 ) + Y 1 +Y 1 ,
где γ
l вр1 ыор1 A t г а н2 ω он с .
Выделим в (23) определяемые навигационные величины
L 6 + L в ) + ТН1 - ; р Г ( L а + L г ) = =
l а н1 +ан2 , с ВР2 ( N пс1 — 1 \ ,
1 ( а н1 — Вр1 ) 1 ( а н1 — Вр1 ) а п “ он Т н2
, с
вр1
а н1 — Вр1
N пс2
( а п “ он Т н2
—
с
N
“ он Тн21 ( ан1 — Вр1 )
,
+— в р1— A L г + В р1 Л“ оР1 f Lfl ) . ан1 — Вр1 г ан1 — Вр1 “ он I ^ q I
V q /
Скоростной навигационный параметр
Чаплинский В.С. и др. Определение скоростных параметров... 23
В правой части формулы (24) слагаемое вр1 ALг < вр1 • 0,25 •IO-3 м/с ан1- вр1 г ан1- вр1
п Р и L гмакс ^ 40 м/с и т бв = 1 ( L б + L в ) ” 0,25 с, в зависимости от требований по точности и соотношения частот в радиоли н иях, либо опускается, либо вводится в виде поправки на основе прогноза величины ∆ L г . Последнее слагаемое, зависящее от относительной разности ДЗЧ задающих генераторов спутника-ретранслятора и наземного пункта, опускается, составляя тем самым пренебрежимую методическую погрешность. Полученный по результатам измерений в ретрансляционной радиолинии суммарно-скоростной навигационный параметр (25) по своей сути является интегральным, характеризующим приращение суммарной дальности на интервале измерения Тн2.
Заключение
Функциональная задача навигационных измерений несущественно усложняет техническое построение ретрансляционного радиотехнического комплекса, а при определении скоростных параметров по доплеровскому смещению несущих частот радиосигналов не ухудшает энергетический потенциал радиолиний при информационном обмене с КА-абонентами. В то же время достаточно высокая информативность ретрансляционных измерений позволяет осуществлять навигационный контроль КА без ограничений, присущих наземному комплексу управления со средствами непосредственной связи с КА, и тем самым определяет очевидную целесообразность включения задачи навигационных измерений в состав функций ретрансляционных систем информационного обмена с КА.
Проведенная математическая интерпретация измерительной информации иллюстрирует характерную аппаратурную зависимость результатов скоростных измерений, которая должна учитываться при траекторном контроле КА-абонентов космических систем ретрансляции.
Список литературы Определение скоростных параметров космических аппаратов по измерениям в ретрансляционных системах
- Жуков А.О. и др. Высокоточная система навигационно-баллистического обеспечения сверхмалых космических аппаратов // Механика, управление и информатика. 2015. Т. 7, № 2 (55). С. 332-339.
- Жуков А.О. и др. Метод проведения обзора и вариант построения космической системы для мониторинга космических объектов на околоземных орбитах // Экологический вестник научных центров Черноморского экономического сотрудничества (ЧЭС). 2013. Т. 3, № 4. С. 71-75.
- Бондаренко А.П. и др. О некоторых ограничениях корректировки модели среды распространения на базе информации GPS/ГЛОНАСС-приемников // Оборонный комплекс - научно-техническому прогрессу России. 2018. № 1 (137). С. 57-63.
- Бондаренко А.П. и др. К вопросу выбора минимального состава специализированного программно-аппаратного комплекса и временных интервалов его работы // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2017. № 2. С. 73-82.
