Определение структуры линейного динамического объекта в задачах непараметрической идентификации

Автор: Раскина А.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 т.17, 2016 года.
Бесплатный доступ
Рассматривается проблема идентификации линейных динамических объектов, в частности, исследуется задача определения параметрической структуры динамического объекта с точностью до параметров при использовании непараметрических моделей. Линейные динамические процессы достаточно часто имеют место в различных контурах управления аэрокосмической техники, в частности, в процессе производства космических аппаратов. В данном случае локальный канал «вибростол - космический аппарат», определяемый вибросигналом и соответствующим сигналом датчика, установленным на аппарате, может описываться динамическими разностными уравнениями. Так как разностное уравнение динамического объекта состоит из запаздывающих на соответствующее число тактов выходных переменных, то задача сводится к задаче определения существенных переменных. Таким образом, метод определения структуры динамического разностного уравнения с точностью до параметров основан на применении правила выделения существенных переменных при непараметрической идентификации. Суть данного правила состоит в следующем: если для каждой переменной, входящей в непараметрическую оценку, поставить в соответствие оптимальный коэффициент размытости ядерной функции, при котором разница между полученной моделью и фактическим выходом объекта будет минимальна, то тогда та переменная, коэффициент при которой будет наименьшим, вносит больший вклад в формирование итоговой оценки и тем самым имеет большее влияние на выходную переменную. Рассматриваются непараметрические модели динамических объектов. Анализируется связь коэффициента размытости ядерной функции с влиянием конкретной переменной, учтенной в непараметрической модели на выход объекта. Приводится алгоритм восстановления структуры разностного уравнения динамического объекта, который включает в себя этапы нахождения оптимальных коэффициентов размытости ядерной функции для каждой переменной, отбор коэффициентов, исключение несущественных переменных, построение модели и расчет относительной ошибки моделирования. Алгоритм будет последовательно производить набор перечисленных выше действий, пока относительная ошибка моделирования не станет больше значения, полученного на предыдущей итерации. Подробно приводятся результаты численного исследования, проводимого методами статистического моделирования, которые показали эффективность предложенного метода как для численных аналогов дифференциальных уравнений, так и для разностных уравнений объектов с памятью.
Разностное уравнение динамического объекта, выделение существенных переменных, объект с памятью, непараметрическая идентификация
Короткий адрес: https://sciup.org/148177651
IDR: 148177651 | УДК: 62.501
Determination of the structure of linear dynamic objects in nonparametric identification problems
The problem of identification of linear dynamic objects is considered. The problem of constructing the parametric structure of dynamic object up to the parameters by using non-parametric models is analyzed. Linear dynamic processes found in various aerospace control loops, for example, in vibration test spacecraft during their production. In this case, the local channel “vibrator - spacecraft” defined by the vibrator and the corresponding sensor signal installed on the spacecraft, can be described by the dynamic difference equations. Since the difference equation of the dynamic object consist of lagging on the appropriate number of cycles of the output variables, the problem reduces to the problem of determining the essential variables. Thus, the method of determining the structure of the dynamic differential equation with up to parameters is based on the application of the rules of allocation of significant variables for nonparametric identification. The essence of this rule is as follows: if, for each variable, a member of the non-parametric estimation assign a optimum ratio blur kernel function in which the difference between the obtained model and the actual output of the object to be minimal, then, is the variable in which the rate will be lower, will contribute more to the formation of the final assessment, and therefore has a greater influence on the output variable. The article deals with the non-parametric model of dynamic objects. The relationship of coefficient blurs kernel function and the influence of a particular variable, measured in non-parametric model output object is investigate. The algorithm of identification of the structure of the difference equation of the dynamic object includes the steps of finding the optimal coefficients blur kernel function for each variable sampling rates, elimination of the unimportant variables, modeling and simulation calculation of the relative error. The algorithm will produce consistently set the above steps until the relative error modeling will not be greater than the value obtained in the previous iteration. Detailed results of numerical study conducted by the methods of statistical modeling of the effectiveness of the proposed method for numerical analogs of differential equations and difference equations for objects with memory are given.
Текст научной статьи Определение структуры линейного динамического объекта в задачах непараметрической идентификации
Введение. Одной из основных проблем современной теории идентификации и управления является определение структуры модели исследуемого объекта. На сегодняшний день большинство работ по данной проблеме посвящены методам параметрической идентификации [1–3], где структура процесса постулируется с точность до вектора параметров, исходя из имеющейся априорной информации. Причем выбор структуры модели процесса основывается на накопленном опыте работы с подобными объектами, а также зачастую осуществляется методом перебора различных моделей из заданного класса. Далее следует этап настройки параметров модели с использованием различных математических подходов, таких как, например, метод наименьших квадратов, различные рекуррентные оценки и т. д. В условиях недостатка априорной информации об объекте исследования такие подходы малоэффективны из-за наличия существующего многообразия процессов, их сложности и малоизученности.
В научной литературе по данной проблематике можно выделить несколько подходов. Рассмотрим наиболее известные из них. В работе [4] предлагается метод восстановления модели, в котором сначала следует этап выбора предполагаемой структуры из априорной информации, настройка параметров модели с использованием рекуррентных методов, а далее на основе имеющейся выборки измерений выполняется проверка предложенной модели. В случае получения неудовлетворительных результатов моделирования структура модели подлежит доработке, а параметры модели настраиваются заново. Как отмечалось ранее, подавляющее большинство подходов в задачах выбора параметрической структуры модели основаны на переборных методах, к которым относится, в частности, метод группового учета аргументов [5; 6]. Сущность метода состоит в выборе регрессионных моделей оптимальной сложности, где под сложностью понимается число параметров модели. Таким образом, в рамках данного метода осуществляется перебор многих моделей-претендентов с различным числом параметров по ряду критериев. В результате находится модель оптимальной структуры в виде одного уравнения или системы уравнений [5]. В [7] излагаются методы структурной идентификации динамических систем на основе анализа информационных портретов. Предложена процедура нахождения порядка модели, основанная на минимизации ширины интервала изменения коэффициента структурности [7]. В настоящей статье предполагается новый метод определения структуры линейного динамического объекта, основанный на непараметрической теории идентификации [8–10]. В основу предлагаемого метода ложится правило выделения существенных переменных на основе измерения коэффициента размытости ядерной функции в непараметрической модели. Впервые данная идея была предложена профессором А. В. Медведевым в [11].
Постановка задачи идентификации . Пусть объект представляет собой одномерную динамическую систему и описывается следующим разностным уравнением:
xt = f ( x t - 1 , x t - 2 , -, x t - k , ut ), (1) где f ( . ) – неизвестный функционал; xt – выходная переменная процесса; ut – управляющее воздействие; k – глубина памяти динамического объекта (в терминологии А. А. Фельдбаума) [12]. Если проводить аналогию с описанием исследуемого процесса в непрерывном времени в виде дифференциальных уравнений, то k – порядок старшей производной в соответствующем уравнении. Здесь существенным является то, что вид функционала не определен с точностью до параметров.
Классическая для теории идентификации блок-схема моделирования данного процесса представлена на рис. 1.
На рис. 1 приняты следующие обозначения: xs ( t ) – выход модели объекта; ( t ) – непрерывное время; индекс t – дискретное время; htu , htx – случайные помехи измерений соответствующих переменных процесса; индекс h у переменных объекта из соображения простоты опущен: u t = u h , xt = x h ; ^ ( t ) - векторная случайная помеха.
Введем обозначения:
zt =( zi,-, zk+1 ) = ( xt-1,-> xt - k, U), тогда xt = f (zt) ■
При идентификации динамической системы (1) ее параметрическую модель естественно принять в форме xs = fs (Xt-1, —, Xt-k, U,a),( где a - вектор параметров, подлежащий оцениванию на основании обучающей выборки. Таким образом в случае линейной динамической системы определение структуры динамического объекта (1) сводится к определению переменных, входящих в состав модели (4). C учетом переобозначений (2) модель (4) может быть показана на схеме (рис. 2), которая иллюстрирует модель динамической системы в дискретном времени, сведенную к модели статической системы, когда на вход последней поступают не только пере-менныеut, но и xt-1,xt-2, ...,xt-k и т. д.
На рис. 2 ЭЗ - элемент запаздывания [1]. Схема, изображенная на рис. 2, также является близкой к классической схеме, рассматриваемой в теории (рис. 1), так как дискретное уравнение, описывающее объект в данном случае, имеет соответствующий аналог среди дифференциальных уравнений. Как было замечено ранее [13; 14], рассмотрение динамического процесса с помощью данной схемы не является единственным, так как одна из переменных процесса, например xt _ 2 , может отсутствовать, а конечное выходное воздействие может зависеть только от переменных xt -1 , xt -3 и входного воздействия ut : xt = f ( xt - 1, xt - 3, ut ). Таким образом, схема примет вид, изображенный на рис. 3.
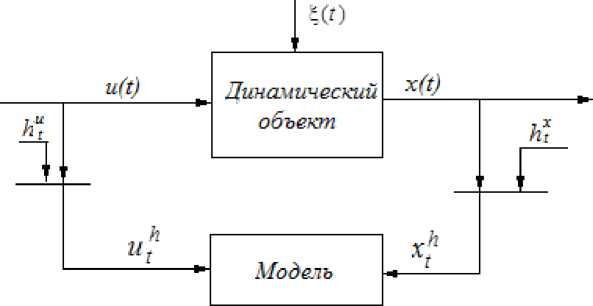

Рис. 1. Классическая схема моделирования одномерного динамического объекта
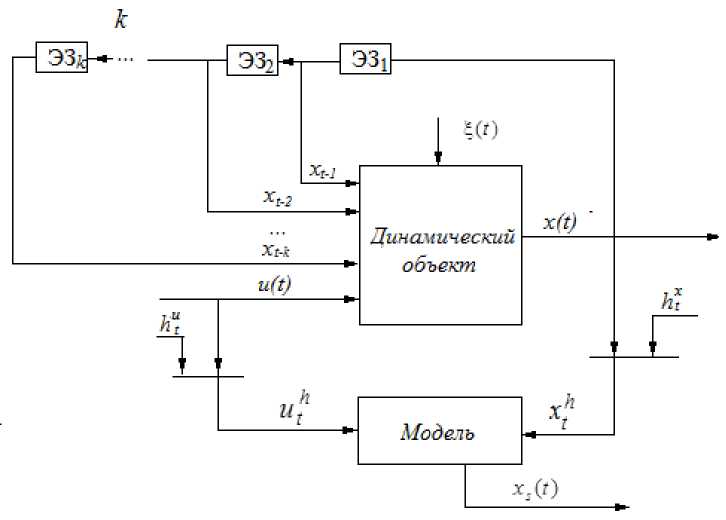
Рис. 2. Блок-схема моделирования объекта с памятью
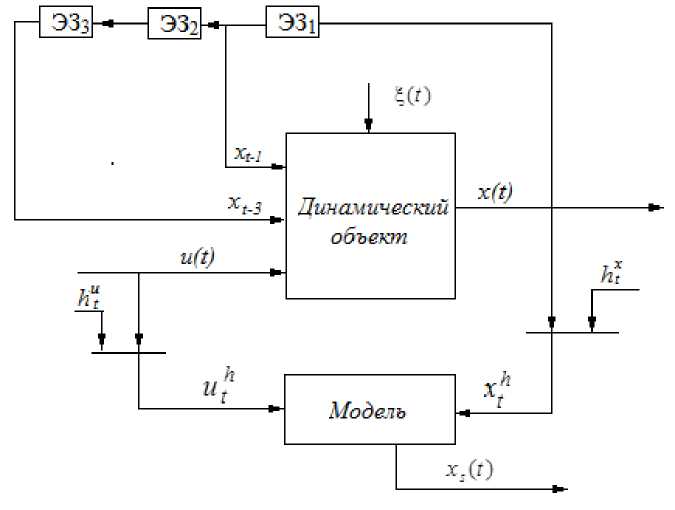
Рис. 3. Блок-схема моделирования объекта с памятью при фиксированных запаздывающих на соответствующие число тактов выходных переменных
В рассматриваемой задаче контроль входных-выходных переменных осуществляется через одинаковые интервалы времени A t. Производя соответствующие измерения, получаем исходную выборку входных-выходных переменных { x i , u i , i = 1, 5 }, где 5 -объем выборки. Задача состоит в определении запаздывающих на определенные такты выходных переменных, которые необходимо учесть в модели (4), что позволит сделать предположение о параметрической структуре модели динамического объекта (4).
Выделение существенных переменных. В классическом случае, изображённом на рис. 2, задача идентификации состоит в оценивании класса операторов на основе выборки {xi, ui, i = 1,5}. Таким образом, в качестве оценки модели объекта может быть принято условное математическое ожидание вида x (t) = M{ x (t)/u (t)}. (5)
-Z V H 5 i = 1
u
^^^^^^в
ui
u cs
■ 4" H сsx
xs^-x-L
X
X
X 4" H с s x
( xs-3 xi-3
X
В моделях (6), (7) H ( ■ ) - ядерная колоколообраз-
ная
1 jt функция, с5,с5 , ..., c5
тости ядерной функции, условиям сходимости [15].
- коэффициенты размы-которые удовлетворяют В качестве колоколооб-
В случае, когда динамический объект описывается дифференциальным уравнением при последовательной дискретизации, итоговое разностное уравнение будет содержать последовательно все переменные: x t - 1 , x t - 2, ..., x t - k . Этому соответствует блок-схема моделирования, изображенная на рис. 2. Тогда в качестве непараметрической модели объекта можно использовать модель, в которой все коэффициенты разностного уравнения будут учтены [11]:
разной функции H ( ■ ) могут быть использованы различные ядра [15]. Следует учитывать, что модели вида (6), (7) можно использовать только при равных интервалах измерения A t .
* x 1 * x 2
Оптимальные параметры размытости с 5 , с 5 , ...,
* xk - „ - _ с 5 при наличии обучающей выборки находятся из задачи минимизации показателя соответствия выхода объекта xt и выхода модели x5, основанного на методе скользящего экзамена, когда в моделях (6), (7) по индексу г исключается q-е наблюдение переменной, предъявляемой для экзамена:
1 *Y2 *Yk
R ( с 5 , с 5 , ..., с 5
5 2
) = Z(xq - xq )
xs
=-Z VH 5 i = 1
u
^^^^^^»
ui
u cs
k
П - j H j = 1 c x
( А x5 - j — xi- j
x cs
1 1 х2 xx
' 5 , С 5
min
,
x k
.., с 5
...
q = 1
, q * i ,
Для случая, изображенного на рис. 3, модель может быть принята в виде (7), где учтены только выходные переменные, непосредственно от которых зависит выход процесса:
где индекс i фигурирует в формулах (6), (7).
Существенным в оценках (6), (7) является то, что в соответствие каждой выходной переменной x5 - 1 , ..., x5 - k , запаздывающей на некоторые величины,
ставится свой коэффициент
x1 xk csx, ..., csx
.
размытости ядра
Алгоритм вычисления значимых переменных xs - j строится по следующей схеме. Сначала задаем
Из представленных выше моделей видно, что степень вклада той или иной выходной переменной из правой части уравнений в итоговое значение оценки зависит от
начальное значение k. Затем строим модель по формуле (6) и считаем относительную ошибку моделирования W 0 :
1 H c s x j
x s - j - x i - j
A
ss
-£( x - x ) 2/£ — ( m x - x )2, stt / и s - 1
Выражение (9) состоит из двух частей:
и
H
. Что касается первого множителя то
xj csx
xj , c s x
наблюдается
следующая зависимость: чем
где mx – математическое ожидание.
Далее на каждой i -й итерации выполняем следующий набор действий:
1 k
-
1. Для каждого коэффициента csx , ..., csx нахо-
- x1*x1x2*x2
-
2. Находим из всех полученных значений макси- xj мальное – c .
дится оптимальное значение: cs = c s , cs = c s , ..., xk *xk cs = c s .
max_ s
меньше
xj 1
csx , тем больший вклад значение j вносит x cs
3. Строим модель по формуле (6), исключая мно-
в итоговую оценку. Таким образом, можно построить
житель Н
x.
- x i
c
'x-
A
при учете, что j – номер
следующую цепочку неравенств:
s
12 k если cs < cs <... < cs
то — > — x1x2 cscs
k . c s x
j при cx .
max_ s
Рассмотрим вторую составляющую уравнения (9).
Коэффициенты c x и ядерная функция Н ( ■ ) должны удовлетворять следующему свойству:
c
w
JН
w
wi
's Q ( u )
w cs
1w = 1,
где w – некоторая переменная. Исходя из данного x1*x1x2*x2 xk условия, при учете, что cs = c s , cs = c s , ..., cs = k
= c s , можно построить следующую последователь-
4. Считаем относительную ошибку Wi .
Данные действия будут повторяться, пока W ^ W i. i i - 1
Вычислительный эксперимент . Численное исследование алгоритма непараметрической идентификации осуществлялось методами статистического моделирования. Для вычислительного эксперимента был выбран объект, описываемый уравнением вида
0,5 d-x + 0,5 d-x + 0,8 dx + 1,5 x ( t ) = u ( t ). (12)
dt 2 dt 2 dt
ность неравенств:
В дискретном виде данное уравнение равно xt = 2,69 ■ xt-1 - 2,46 xt-2 + 0,73 xt-3 + 0,015 ut. (13)
*x1 *x2 *xk если c s < c s <... < c s , то
Г A
< Н
x s - 2 - x t - k
I c s
... < Н
J
x s - k - x t - k
k c * s x
A
J
Приведем пример. Пусть c*sx1 – коэффициент раз- мытости ядра при xs-1, а c s - при xs-2. Если
cs
< c s
, то Н
x s - 1 - x t - 1

A A
< Н
x s - 2 - x t - k
Зададим начальное значение k = 6. Результаты моделирования с использованием формулы (6) представлены на рис. 5.
Относительная ошибка моделирования W 0 = 0,017. Далее находим оптимальные коэффициенты с использованием алгоритма покоординатного спуска. Найденные коэффициенты равны: с ** = 0,675 при ut , с * = 0,131 при xt _ 1 , с*2 = 0,186 при xt - 2, с ** = 0,412 при xt - 3 , с ** = 1,023 при xt - 4 , с 6 = 1,988 при xt - 5 ,
V
2 csx
J
, и тогда
*
с 7 = 1,876 при xt - 6. Зависимость между полученны-
выходная переменная xs - 1 имеет большее влияние
ми коэффициентами и значениями колоколообразной
функции представлены на рис. 6.
на выходную величину, чем xs - 2. Графически это выражается так, как показано на рис. 4.
На рис. 4
На рис. 6
Н 7
= Н
x s - 1 - x t - 1
Н 1
, Н 2 = Н
x s - 2 - x t - k
* x 2
V c s
A
x s - 6 - xt - 6
J
После выполнения всех этапов алгоритма были исключены переменные xt - 4 , xt - 5, xt - 6. Таким образом, полученная итоговая структура динамического объекта, описываемого дифференциальным уравнением третьего порядка (12), равна:
xs = а1 xt-1 + а2xt-2 + «3xt-3 + Р ut, что соответствует структуре разностного уравнения объекта (13), а непараметрическая модель имеет вид
xs
x 2 сs
x s - 2 - Х - 2
x 2 cs
■ 4 Ф сsx
x 3 сs
x s - 1 - Х - 1
x cs
x s - 3 - X - 3
V
x 3 cs
X
Результаты моделирования с использованием формулы (14) представлены на рис. 7.
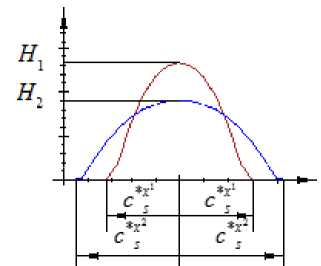
Рис. 4. Зависимость величины значения ядерной колоколообразной функции от величины коэффициента размытости ядра
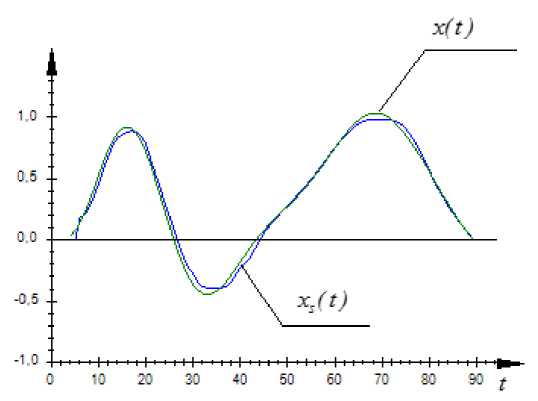
Рис. 5. Результаты моделирования процесса (13) при значении k = 6
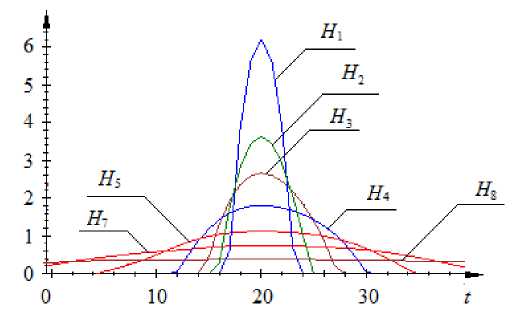
Рис. 6. Зависимость величины значений ядерной колоколообразной функции
* u * x 1 * x 6
от величин полученных оптимальных коэффициентов размытости ядра с u scs x , ..., cs x
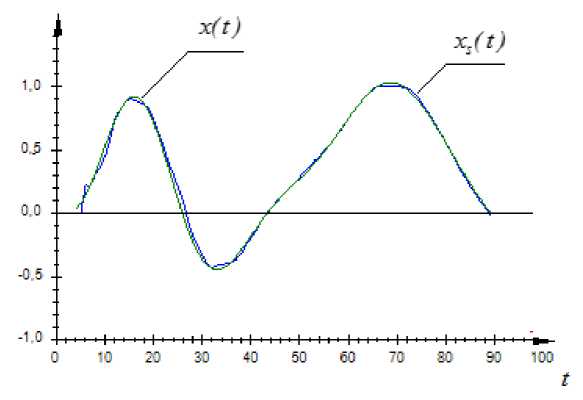
Рис. 7. Результаты моделирования процесса (13) при использовании модели (14)
Относительная ошибка моделирования равна W 3 = 0,005.
Рассмотрим процесс восстановления структуры модели для объекта с памятью. Пусть объект описывается следующим дискретным уравнением:
x t = 0,2 ■ x t - 1 + 0,4 x t _ 3 + 0,5 u t . (15)
Выберем в качестве начального значения k = 4. Относительная ошибка моделирования, полученная на первой итерации, равна W0 = 0,105. Далее следует этап нахождения оптимальных коэффициентов: с4 = 0,124 при ut, с* = 0,231 при xt_1, с * = 0,393 при xt_2, с3 = 0,129 при xt_3, с5 = 0,425 при xt_4. После исключения переменных xt_2 и xt_4 относительная ошибка моделирования сократилась до W2 = = 0,012, а параметрическая структура была найдена в виде xs =а1 xt-1 +а2xt-3 +в ut, что соответствует структуре дискретного уравнения (15).
Заключение. В статье предложен алгоритм определения параметрической структуры линейного динамического объекта, основанный на применении правила выделения существенных переменных. Данный подход тесно связан с определением оптимальных коэффициентов размытости ядерной функции при использовании непараметрической модели функции регрессии по наблюдениям. В статье предлагается алгоритм, действие которого сводится к определению глубины памяти динамического объекта, которая представляет собой порядок старшей производной в соответствующем дифференциальном уравнении при проведении аналогии с описанием исследуемого процесса в непрерывном времени. Данный алгоритм состоит из нескольких этапов, включающих в себя определение оптимальных коэффициентов размытости, их отбор и построение итоговой модели. Одним из основных преимуществ предложенного алгоритма по сравнению с доминирующими на сегодняшней день методами восстановления параметрической структуры является тот факт, что разработанный непараметрический алгоритм более применим к задачам практики, так как способен работать в условиях малой априорной информации об объекте.
Acknowledgments . I would like to express my gratitude to Prof. A. V. Medvedev for continuous guidance and research assistance.
Список литературы Определение структуры линейного динамического объекта в задачах непараметрической идентификации
- Цыпкин Я. З. Адаптация и обучение в автоматических системах. М.: Наука, 1968. 400 с.
- Цыпкин Я. З. Информационная теория идентификации. М.: Наука. Физматлит, 1995. 336 с.
- Эйкхофф П. Основы идентификации систем управления. М.: Мир, 1975. 683 с.
- Бокс Д., Дженкинс Г. Анализ временных рядов, прогноз и управление. М.: Мир, 1974. Вып. 1. 406 с.
- Ивахненко А. Г., Мюллер И. А. Самоорганизация прогнозирующих моделей. Киев: Техника, 1984. 350 с.
- Стрижов В. В., Крымова Е. А. Методы выбора регрессионных моделей. М.: ВЦ РАН, 2010. 60 с.
- Карабутов Н. Н. Наблюдаемые информационные портреты и задача структурной идентификации//Идентификация систем и задачи управления, SICPRO ’07: тр. VI Междунар. конф. (29 янв.-1 фев. 2007, г. Москва) М.: Институт проблем управления им. В. А. Трапезникова РАН, 2007. С. 89-115.
- Медведев А. В. Основы теории адаптивных систем/СибГАУ. Красноярск, 2015. 525 с.
- Медведев А. В. Теория непараметрических систем. Моделирование//Вестник СибГАУ. 2010. № 4 (30). С. 4-9.
- Медведев А. В. Теория непараметрических систем. Процессы//Вестник СибГАУ. 2010. № 3 (29). С. 4-9.
- Медведев А. В. Адаптация и обучение в условиях непараметрической неопределенности//Фундаментальные исследования (физико-математические и технические науки). Новосибирск: Наука. Сиб. отд-ние, 1977. С. 92-97.
- Фельдбаум А. А. Основы теории оптимальных автоматических систем. М.: Физматгиз, 1963. 552 с.
- Банникова А. В., Медведев А. В. Об управлении объектами с памятью в условиях непараметрической неопределенности//Вестник СибГАУ. 2014. № 5(57). С. 26-37.
- Банникова А. В., Сергеева Н. А. О непараметрическом моделировании стохастических объектов с памятью//Вестник СибГАУ. 2014. № 2 (54).
- Надарая Э. А. Непараметрические оценки плотности вероятности и кривой регрессии. Тбилиси: Изд-во Тбил. ун-та, 1983. 194 с.
