Определение влияния параметров источника питания на резонансный режим работы вентильного электропривода колебательного движения

Автор: Кулаковский Юрий Михайлович, Аристов Анатолий Владимирович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 1 т.18, 2018 года.
Бесплатный доступ
Исследование особенностей работы электрических машин периодического движения в составе электромеханических комплексов различного целевого назначения направлено на создание высокоэффективных электроприводов как линейного, так и углового колебательного движения. Особое место среди них занимают безредукторные электроприводы, в которых колебательный режим работы формируется за счет различных видов модуляции питающих фазных напряжений исполнительного двигателя. На основании анализа математической модели вентильного электропривода определена методика расчета его выходных параметров при колебательном движении с учетом функций регулирования, параметров электрической машины и нагрузки. Показано, что при определении колебательного электромагнитного момента вентильного двигателя при инженерных расчетах достаточно учитывать в его демпфирующей составляющей только постоянные члены. Получено выражение, определяющее амплитуду колебаний подвижного элемента вентильного электродвигателя, что позволило установить возможность регулирования собственной частоты электропривода за счет изменения амплитуды одного из фазных напряжений. Представлены результаты математического моделирования вентильного электропривода колебательного движения в математической среде MathCAD 2000, иллюстрирующие возможность обеспечения резонансного режима работы электропривода согласно разработанному алгоритму. Полученные в работе аналитические соотношения составили теоретические основы не только для расчета выходных параметров, но и рабочих характеристик вентильного электропривода колебательного движения. Они также могут быть рекомендованы для оценки динамических и энергетических показателей электропривода в режиме колебательного движения.
Вентильный электропривод, колебательное движение, собственная частота, резонансный режим работы
Короткий адрес: https://sciup.org/147232663
IDR: 147232663 | УДК: 621.345.1 | DOI: 10.14529/power180116
How power supply parameters affect the resonant state of oscillatory BLDC drives
Periodic-motion electric machines are used in various electromechanical facilities designed for various purposes; the operating properties of such machines are researched to construct high-performance oscillatory drives generating both linear and angular motion. One specific kind of such drives is gearless electrical drives which generate oscillatory motion by applying different modulations to power the phase voltages of the motor. Based on mathematical model analysis of a valve actuator, we define a procedure for calculating its oscillatory-motion output parameters with due account of control functions, the electric machine parameters, and the load. It is shown that when finding the oscillating electromagnetic torque in a BLDC motor for engineering calculations, it is enough to take into account only the constant terms in its damping component. We have thus formulated an expression for finding the oscillation amplitude of the moving BLDC element, which has enabled us to establish the possibility of controlling the eigen-frequency of the BLDC motor by altering the amplitude of one of the phase voltages. Such oscillatory motion has been simulated by means of MathCAD 2000 with the simulation results being presented here and demonstrating how resonance-state operation can be attained per the algorithm developed. The obtained analytical relations make up the theoretical basis for computing not only output parameters, but also the operating properties of oscillatory electrical drives. They can be recommended for the evaluation of dynamic indexes and energy data for oscillatory motion.
Текст научной статьи Определение влияния параметров источника питания на резонансный режим работы вентильного электропривода колебательного движения
В настоящее время к современным электроприводам углового колебательного движения предъявляются все более жесткие требования относительно энергетических показателей и точности позиционирования исполнительного органа [1–3].
Одним из рациональных способов повысить эффективность работы электропривода колебательного движения является построение его на базе двухфазного вентильного двигателя, работающего непосредственно в режиме вынужденных колебаний за счет фазовой модуляции питающих напряжений с обеспечением резонансного режима. Как известно, при этом инерционные и упругие силы в электромеханической системе взаимно уравновешиваются, а энергия возбудителя колебаний расходуется только на преодоление диссипативных сил [4–6].
Очевидно, что энергетически выгодный резонансный режим работы вентильного электропривода может достигаться за счет регулирования механических, либо электрических параметров системы [1, 7, 8]. Причем последнее является более предпочтительным, так как не требует дополнительного введения в систему позиционной нагрузки в виде торсионов или пружин.
Целью данной статьи является определение
влияния электрических параметров источников питания на резонансный режим работы вентильного электропривода при фазовом способе возбуждения колебательного режима работы.
Для этого необходимо решить следующие задачи:
– аналитически определить выражения и разработать методику для расчета выходных параметров вентильного электропривода колебательного движения;
– на основании полученных выражений провести оценку угловой координаты положения подвижного элемента привода от параметров источника питания с учетом обобщенной нагрузки на валу двигателя;
– построить графики зависимостей амплитудного значения координаты от фазного напряжения вентильного двигателя при разных значениях частоты колебаний и определить зависимость последней в функции от напряжения.
Математическая модель вентильногоэлектропривода колебательного движения
Для упрощенного математического описания вентильного электродвигателя используется система координат d – q , жестко связанная с ротором, при этом ось d совмещается с направлением магнитного поля статора.
Электромеханические системы
В этом случае система дифференциальных уравнений, которыми описываются электромагнитные и электромеханические переходные процессы в вентильном двигателе, имеет вид [7, 9, 10]:
di
—
® Lq i q ;
Ud = idRs + Ld —r dt di
Uq = iqRs + L + m Ldid +-
М э = Pm [ i q У m + i d i q ( Ld — Lq ) ] = М н( J m mdt , m m , ddt m X
1 dmm 1
= (Мэ — Мн ), = p dt J э н dt m где Ud, Uq, Id, Iq – напряжения и токи фазных обмоток вентильного двигателя; Rs – активное сопротивление обмотки статора; Ld, Lq – продольная и поперечная индуктивности; Ψm – максимальное потокосцепление обмотки статора с потоком ротора; ω, ωm – электрическая и механическая скорости изменения обобщенной координаты подвижного элемента; χ – угловое перемещение подвижного элемента; Мэ, Мн – электромагнитный момент и обобщенный момент сопротивления; р – число пар полюсов; m – число фаз двигателя.
Третье уравнение системы (1) описывает колебательное движение вторичного элемента вентильного двигателя и представляет собой нелинейное дифференциальное уравнение второго порядка.
Обобщенная нагрузка на валу электродвигателя колебательного движения М н является функцией параметров нагрузки привода и его движения. Наиболее часто она представляется совокупностью позиционных и инерционных сил, а также сил жидкостного и сухого трения [11, 12]:
d 2 x „ dx .
Мн = Lмех ■' RMех "Г + Cмех X + Мтр sign m , dt2 dt где Lмех – инерционная составляющая нагрузки; Rмех – демпфирующая составляющая нагрузки; Cмех – позиционная составляющая нагрузки; Мтр – момент сухого трения.
В общем случае для возбуждения колебательного режима работы статорные обмотки вентильного двигателя подключаются к источникам напряжения [13]:
Ud ( t ) = U 1 = const;

Uq (t) = U2 sIn(Q t + a), где U1 – постоянное напряжение обмотки d; U2, Ω, α – амплитудное значение, круговая частота и начальная фаза питающего напряжения по обмотке q.
Подставив выражения для фазных напряжений (3) в первые два уравнения системы (1) и решив ее относительно фазных токов обмоток d и q вентильного двигателя, получим:
i d ( t ) = U 2 [ N 2 cos( Q t + a ) + N 1 sIn( Q t + a ) ] + U 1 N 3 + N 4 ;

iq ( t ) = U 2 [ N 5 sIn( Q t + a ) + N 6 cos( Q t + a ) ] — U 1 N 7 — N 8 .
Здесь значения коэффициентов N 1 …N 8, зависящих от параметров двигателя, частоты и скорости колебаний подвижного элемента привода, представлены в табл. 1.
Таблица 1
Коэффициенты для рассчета значений фазных токов
®L ( m 2 LdL + Rs 2 — Q 2 LdL ) —m LqQ Rs ( Ld + Lq )
q qs q q sq
= , N7=
(m2 Ld Lq + Rs — Q2 Ld Lq )2 + Q2 Rs (Ld + Lq) (m2 Ld Lq + Rs — Q2 Ld Lq )2 + Q2 Rs (Ld+
N = Rs N = —®2 Lq Уm N = Rs (m2 Ld Lq + Rs — Q2Ld Lq) + LdQ2Rs (Ld+
-
3 m2LdLq + R2’ 4 m2LdLq + R2 ’ 5 (m2LdLq + Rs —Q2LdLq)2 +Q2R2(Ld + Lq)
N = L d Q ( m 2 L d L q + Rs —q 2 L d L q ) — R 2 Q ( L d + L q ) N = L d m N _ У „ R s m
-
6 ( m 2 L d L q + R s —Q 2 L d L q ) 2 +Q 2 R 2( L d + L q ) , 7 m2 L d L q + R s , 8 m2 L d L q + R2 '
После подстановки найденных значений токов (4) в уравнение для электромагнитного момента, и разложив последний в ряд Маклорена по степеням скорости m в окрестностях m = 0, получим:
М э( m ) = М э(0) + dM aC0) m + ... , d m
где М э (0) = М П характеризует пусковую составляющую электромагнитного момента двигателя;
dМ э (0) d ю
to = М д = F д ю - электромагнитный демпфирующий момент, F д - коэффициент электромагнитно-
го демпфирования вентильного двигателя;
M П = Р mm [^ m i q |ю= 0 + ( L d - L q ) i d | ю= 0 i q | ю= 0 ] =
= ( U 2 d 1 + U 2U 1 d 2)( 5 1 sin( Q t + а ) + Q 5 2 cos( Q t + а )),
FД = Pm ^ m^ T-i q |ю= 0 + ( Ld - Lq 2 d IV

did diq qdю|ю=0 id dю|ю=0)
= ( - U 12 k 3 + U 1 k 1 - k 2 + U 2 2 ( k 4 - ( k 5 cos(2( Q t + а )) - k 6 sin(2( Q t + а )).
Следует отметить, что при инженерных расчетах коэффициента электромагнитного демпфирования вентильного двигателя достаточно учесть только постоянные составляющие с коэффициентами k 1 – k 4 , так как весовой вклад составляющих модуляции не превышает 3 %.
С учетом сказанного уравнение движения подвижного элемента двигателя (2) при пренебрежении в электромеханической системе моментом сухого трения примет вид:
T d 2 X ( R мех F Д ) d X Г ч M
L мех 2+ , + C мех X M П .
dt 2 dt
Решением уравнения (6) будет являться закон движения подвижного элемента вентильного двигателя:
X ( t ) = А sin( Q t + а ) + B cos( Q t + а ), (7)
где составляющие амплитуды колебания можно записать как
U 1 ( h 3 C мех - hC мех Q 2 ) + h 0 C мех Q 2 + C мех h 2 + Q 2 ( U 3 h 1 C мех + h 16 C мех + U 1 hn C мех ) +
A =______________________ + Q 4 ( - U 13 h i8 + U 2 h i9 + U 1 h 20 + h 21 ) __________________________
( С мех -Q 2 h 24 ) ■ ( Q 2 ( U 4 h 4 - U 3 h 5 + U 2 h. + U 1 h 7 + h 8 - C мех h 9 ) + h W + C мех )
B = __Q ( - U 1_ h 13_ +_ U 1_ h L4^_ U 1( C мех h 12_ +_ h 22 2 +_ C мех h 11 +_ h 2з)__
Q 2 ( U 4 h 4 - U 3 h 5 + U 12 h 6 + U 1 h 7 + h 8 - C мех h 9 ) + h W + C мех .
Здесь h 0… h 24 – коэффициенты, зависящие от параметров вентильного двигателя, источника питания по обмотке q и нагрузки.
Тогда выражение для амплитудного значения координаты подвижного элемента вентильного двигателя при отсутствии позиционной нагрузки ( C мех = 0) будет иметь вид:
X m
Q 2 ( - U 13 h 18 + U 12 h 19 + U 1 h 20 + h 21 ) Y
\(- h 2 4 ■ ( Q 2 ( U 14 h 4 - U 13 h 5 + U 12 h 6 + U 1 h 7 + h 8 ) + h 10)
' Q ( - U 13 h 13 + U 12 h 14 + U 1 h 22 + h 23 )
^ Q2 ( U 4 h 4 - U 1 h 5 + U 2 h 6 + U 1 h 7 + h § ) + h 10
Полученные выражения (7)–(9) являются теоретической основой для расчета выходных параметров и рабочих характеристик вентильного электропривода колебательного движения. Они также могут быть использованы при оценке динамических и энергетических показателей электропривода [14, 15].
На основании анализа выражения (9) можно утверждать, что существует условие поддержания максимального значения амплитуды колебаний подвижного элемента вентильного двигателя за счет регулирования собственной частоты привода в заданном диапазоне изменения частоты ω путем изменения напряжения U 1 .
Для определения этого условия необходимо определить скорость изменения подвижного элемента вентильного двигателя, взяв первую производную по времени от выражения (7), и подставить в уравнение для электромагнитного момента (5). После алгебраических преобразований алгоритм регулирования собственной частоты вентильного электропривода колебательного движения будет иметь вид:
U 1 ( Q ) =
2^ Q 2 d 1 -Q d 2 + d 3 ■ cos
arccos
Q 3 d 4 +Q 2 d 5 +Q d 6 + d 7
■J ( Q d 8 + Q d 9 + d 10 )
Q
- d 11
+ d 12
где d1…d12 – коэффициенты, зависящие от параметров вентильного двигателя, источника по обмотке q и нагрузки.
Электромеханические системы
Анализ результатов расчета
Для оценки предложенной методики расчета выходных параметров вентильного электропривода колебательного движения и условия обеспечения регулирования его собственной частоты были проведены расчеты в математической среде MathCAD 2000. В качестве расчетной модели был выбран вентильный электродвигатель, параметры которого представлены в табл. 2 [9, 16–18].
Для данного двигателя, согласно изложенной методике, были рассчитаны выходные параметры и построены зависимости амплитудного значения координаты положения от фазного напряжения U1 при разных значениях частоты колебаний Ω (рис. 1) и алгоритм регулирования напряжения U1 с целью поддержания резонансного режима работы колебательной электромеханической системы (рис. 2).
Полученные графики наглядно иллюстрируют зависимость амплитудно-частотных характеристик электропривода от величины одного из фазных напряжений вентильного двигателя, что позволяет разработать практические схемы электроприводов колебательного движения с регулируемой собст-
Таблица 2
|
Параметры |
R s |
L d |
Lq |
т m |
J |
p |
m |
|
Единицы измерения |
Ом |
Гн |
Гн |
Вб |
Кг·м2 |
– |
– |
|
Значения |
0,96 |
5,25e-3 |
2,25e-3 |
0,183 |
13e-3 |
4 |
3 |
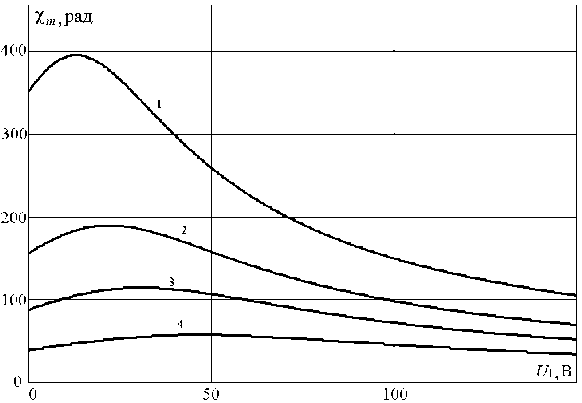
Рис. 1. График зависимости амплитудного значения координаты от фазного напряжения вентильного двигателя: 1 – Ω = 2 рад/с;
2 – Ω = 3 рад/с; 3 – Ω = 4 рад/с; 4 – Ω = 6 рад/с

Рис. 2. Алгоритм поддержания резонансного режима работы вентильного электропривода колебательного движения при регулировании частоты Ω
венной частотой для поддержания энергетически выгодного резонансного режима работы без применения электромеханической обратной связи по положению [19, 20].
Заключение
Применение безредукторных электроприводов колебательного движения с регулируемой собственной частотой, выполненных на базе вентильных электродвигателей, работающих непосредственно в режиме периодического реверса за счет фазовой модуляции питающих напряжений, позволяет обеспечить практически весь потребный диапазон частот и ускорений при высоких энергетических показателях. Как показали исследования, оценку их выходных характеристик целесообразно проводить по изложенной выше методике, ограничиваясь при расчетах только постоянными составляющими электромагнитного демпфирующего момента. С целью поддержания резонансного режима работы практические схемы электроприводов должны содержать в своей структуре функциональный преобразователь напряжения, реализующий программно или схемотехнически алгоритм (10).
Список литературы Определение влияния параметров источника питания на резонансный режим работы вентильного электропривода колебательного движения
- Аристов, А.В. Электропривод колебательного движения с регулируемой собственной частотой / А.В. Аристов // Доклады ТУСУРа. - 2011. - № 1 (23). - С. 5-9.
- Aristov, A.V. The control system of electric vibrating motor under the potential phase modulation / A.V. Aristov, L.I. Aristova, I.A.Ekkert // Mechanical Engineering, Automation and Control Systems (MEACS): proceedings of the International Conference, Tomsk, 1-4 December, 2015 / National Research Tomsk Polytechnic University (TPU); Institute of Electrical and Electronics Engineers (IEEE). - [S. l]: IEEE, 2015. - [4 p.] DOI: 10.1109/MEACS.2015.7414854
- Иваник, В.В. Моделирование резонансного асинхронного электропривода возвратно-поступательного движения с алгоритмом управления по моменту / В.В. Иваник // Записки Горного института. - 2009. - Т. 182. - С. 81-84.
- Асташев, В.К. Системы возбуждения авторезонансных вибротехнических устройств / В.К. Асташев // Вестник научно-технического развития. - 2007. - № 1. - С. 11-17.
- Jordan, H.E. Energy-Efficient Electric Motors and their Applications / H.E. Jordan // Springer Science & Business Media. - New York, 1994. - 188 p.
- Ede, J.D. Rotor resonances of highspeed permanent-magnet brushless machines / J.D. Ede, Z.Q. Zhu, D. Howe // IEEE Transactions on Industry Applications. - 2002. - 38 (6). - P. 1542-1548.
- DOI: 10.1109/TIA.2002.804765
- Fashilenko, V.N. Energy efficient resonant mode of electromechanical system mining machines based on management structures with PID-controller / V.N. Fashilenko, S.N. Reshetnyak // Miner's week-2015: Reports of the XXIII International Scientific Symposium. - 2015. - P. 608-612.
- High performance control of the permanent magnet synchronous motor using self-tuning resonant controllers / P. Degobert, G. Remy Jing Zeng, P.-J. Barre, J.-P. Hautier // Proceeding of the Thirty-Eighth Southeastern Symposium on System Theory SSST. - 2006. - P. 382-386.
- Герман-Галкин, С.Г. Проектирование мехатронных систем / С.Г. Герман-Галкин. - СПб.: КОРОНА-век, 2008. - 368 с.
- Вентильные электродвигатели малой мощности для промышленных роботов / В.Д. Косулин, Г.Б. Михайлов, В.В. Омельченко, В.В. Путников. - Л.: Энергоатомиздат, Ленингр. отд-ние, 1988. - 184 с.
- Луковников, В.И. Электропривод колебательного движения / В.И. Луковников. - М.: Энергоатомиздат, 1984. - 152 с.
- Design Aspects of a High Speed Permanent Magnet Synchronous Motor/Generator for Flywheel Applications / A. Nagorny, N. Dravid, R. Jansen, B. Kenny // NASA/TM-2005-213651. - 2005. - P. 1-7.
- DOI: 10.1109/IEMDC.2005.195790
- Пат. 2629946 Российская Федерация, МПК51 H02K 33/04, H02P 25/02. Вентильный электропривод колебательного движения / А.В. Аристов, Ю.М. Кулаковский. - Опубл. 01.12.2017, Бюл. № 34.
- Hanselman, D.C. Minimum torque ripple, maximum efficiency excitation of brushless permanent magnet motors / D.C. Hanselman // IEEE Transactions on Industrial Electronics. - 1994. - Vol. 41, no. 3. -P. 292-300.
- DOI: 10.1109/41.293899
- Power limits of high-speed permanent-magnet electrical machines for compressor applications / Z. Kolondzovski, A. Arkkio, J. Larjola, P. Sallinen // Report Series on Electromechanics, Report 76, Aalto University School of Science and Technology. - Espoo 2010. - 21 p.
- Dynamic simulation models of switched reluctance motor drivers / H. Chen, J. Jianguo, S. Suli, Z. Dong // Intelligent Control and Automation, Proceedings of the 3rd World Congress. - 2000. - Vol. 3. - P. 2111-2115.
- Овечкин, О.И. Электромеханизмы и электродвигатели разработки ОАО «Электропривод» / О.И. Овечкин, В.А. Миронов // Электроника и электрооборудование транспорта. - 2013. - № 3. - C. 5-11.
- Pierre-Daniel Pfister. Very High Speed Slotless Permanent Magnet Motors: Analytical Modeling, Optimization, Design and Torque Measurement Methods / Pierre-Daniel Pfister, Yves Perriard // IEEE Transactions on industrial electronics. - 2010. - Vol. 57, no. 1. - P. 296-303.
- DOI: 10.1109/TIE.2009.2027919
- Луковников, В.И. Анализ электромеханической автоколебательной системы «асинхронный электродвигатель - упругий элемент» / В.И. Луковников, Ю.А. Рудченко // Вестн. ГГТУ им. П.О. Сухого. - 2003. - № 1. - С. 61-66.
- Peter K. Abraham. Design and implementation of an efficient regenerative braking system for a vector controlled PMSM drive / Peter K. Abraham, S. Ashok // 3rd International Conference on Electrical Energy Systems (ICEES). - 2016. - P. 312-317.
- DOI: 10.1109/ICEES.2016.7510660
