Определение высоты сканирования сельскохозяйственных угодий тепловизионными сканерами

Автор: Дудник Виталий Владимирович, Роженцов Вадим Вячеславович, Падалко Григорий Геннадьевич
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Механизация и электрификация животноводства, растениеводства
Статья в выпуске: 4 (12), 2010 года.
Бесплатный доступ
Рассмотрены принципы работы и применение тепловизионных сканеров, устанавливаемых на летательные аппараты. Кратко описаны возможности их использования для контроля сельскохозяйственных угодий. Представлена схема работы перспективного тепловизора с адаптивным сканированием. Приведена методика расчета высоты полета исходя из требований максимальной дальности обнаружения тепловизионного излучения объектов.
Тепловизионные сканеры, летательные аппараты, тепловизор с адаптивным сканированием
Короткий адрес: https://sciup.org/140204066
IDR: 140204066 | УДК: 631.471
Definition of flight of scanning of agricultural fields by infrared vision scanners
The article was devoted to principals of work and using of infrared vision scanners which mounted to aircrafts. Possibilities of using for agricultural fields checking were described shortly. Scheme of perspective infrared vision device with adaptive scanning was presented. The calculation method of flight altitude defining with demands of maximal distance of infrared object defining was presented.
Текст научной статьи Определение высоты сканирования сельскохозяйственных угодий тепловизионными сканерами
В последнее время наблюдается широкое применение сканирующих устройств, в первую очередь, тепловизионных, для решения самых разнообразных народнохозяйственных задач. В нашей стране чаще всего они используются для контроля состояния продуктопроводов с целью определения мест утечек нефти, газа, воды, определения мест несанкционированных врезок в нефте- и газопроводы, оценки состояния теплоизоляции и мест утечек тепловой энергии. Нефте- и газопроводы имеют отличающуюся по сравнению с окружающей средой температуру, поэтому даже в случае подземной прокладки формируются достаточные для регистрации тепловые контрасты.
Однако сканеры могут эффективно использоваться не только для топливноэнергетического комплекса. Такие устройства могут принести большую пользу в сельском хозяйстве.
Засуха 2010 года особенно обострила вопросы исследования влажности земель и потребностей в мелиорации. Наличие достаточного количества влаги в почве на не- большой глубине в утреннее время регистрируется пониженным тепловым фоном. Проводя ежедневное сканирование, можно контролировать изменение состояния почвы на разных участках сельхозугодий. Кроме этого, в ранний весенний период сканеры позволят установить предполагаемую всхожесть озимых культур на каждом поле. Дело в том, что выжившие после зимнего периода зерна создают на поле «теплый» фон. Места наличия этого фона однозначно указывают на перспективы всхожести культур.
На рисунке 1 показаны примеры тепловизионных изображений мест обводнения железнодорожной насыпи и подземного пожара.
Для повышения эффективности обнаружения и распознавания объектов с помощью тепловизионных устройств, выполняют полеты в периоды утренней и вечерней инверсии тепловых контрастов, а при постобработке применяют цифровые алгоритмы формирования совмещенных, телевизионно-тепловизионных изображений.
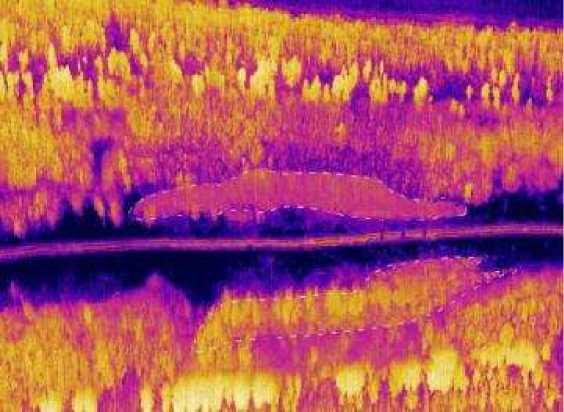

Рис.1. Примеры теплоснимков обводнения насыпи железной дороги (слева) и подземного пожара (справа), сделанных с воздуха
Так как простой тепловизор может обеспечить качественное изображение только очень узкого участка местности, то чаще применяют тепловизионные сканеры, которые поворачивают поле зрения тепловизора на некоторый угол в поперечной плоскости (рис. 2). Иногда доворот зеркала осуществляется и на небольшой угол в продольном направлении для компенсации поступательной скорости и колебаний летательных аппаратов (ЛА) по тангажу. Чаще всего в России используются сканеры ЛА с вращающимися призмами. При их использовании изображение проецируется сперва на призму, а затем поворачивается на объектив и матрицу тепловизора. Этим достигается неподвижность тепловизора при широком поперечном захвате кадров. Однако такие сканеры имеют ряд недостатков – в частности появление «размытости» на тепловом изображении вследствие явления виньетирования, невозможность использования строчных матриц. Для устранения этих недостатков был подготовлен проект маловысотного тепловизора с адаптивным сканированием – «смотрящей» матрицей.
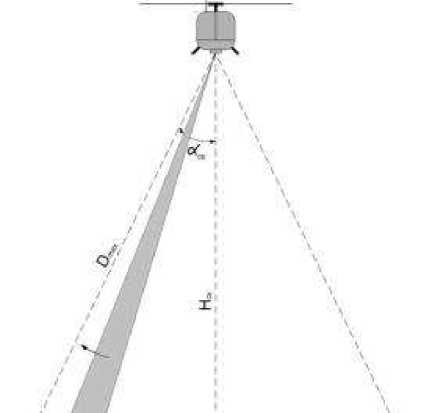
Трасса наблюдения
Рис. 2. Схема сканирования тепловизионным сканером
«Смотрящая» матрица, работающая в «дальнем» диапазоне, с длиной волны 9–12 мкм, позволяет накапливать тепловое изображение и эффективно анализировать излучение сельскохозяйственных угодий и продуктопроводов. Однако для этого требуется «заморозить» ее в пространстве на 0,05 с, для чего необходимо использовать безредукторные электроприводы с большими моментами и легким элементом, меняющим направление движения. В этом устройстве (рис. 3) возможно проектировать на матрицу сравнительно небольших размеров (320×256 элементов) существу- ющего тепловизора 4 изображение земной поверхности через зеркало 3 с линейнодискретным изменяемым законом сканирования таким образом, чтобы на матрице периодически формировались неподвижные изображения (подкадры), из совокупности которых с помощью цифровой обработки далее формировалось бы полное изображение. Закон сканирования изменяется с помощью управляемого электропривода 2 в зависимости от изменения скорости и высоты полета носителя, а также углов крена, тангажа и сноса.
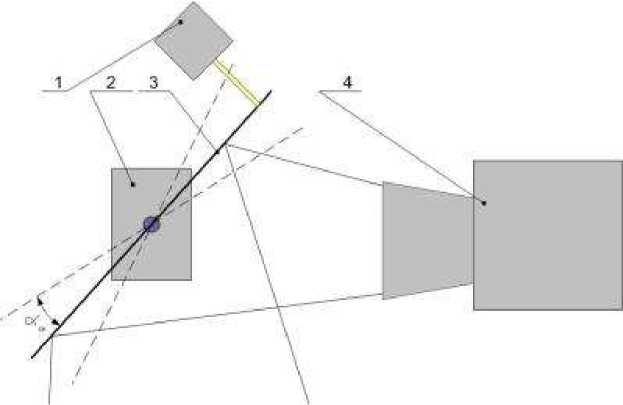
Рис. 3. Схема тепловизора с адаптивным сканированием (вид по полету)
Для снижения стоимости применения сканера на ЛА, повышения точности целесообразно использовать инерциальный измерительный блок, систему воздушных сигналов (СВС), спутниковую навигационную систему (СНС) и магнитометр самого ЛА. Объединение сканера с бортовыми измерительными системами ЛА позволяет вести запись совместно с определением пространственного положения теплового приемника, что кроме ориентации зеркала в дальнейшем может служить для «сшивания» изображения. Движение зеркала измеряется точными датчиками перемещения 1, использующими принцип оптической интерференции. Для исключения размытости изображения используется «замораживание» изображения на заданное время по сигналам контроллера, обрабатывающего данные от датчиков скорости, высоты и углового положения носителя. Для упрощения «сшивания» подкадров изображения в сканере используется принцип косого сканирования. В связи с тем, что система «отслеживает» изменение параметров полета, заложенный в нем принцип называется адаптивным цифровым сканированием. Применение этого принципа позволяет обеспечить обзор наблюдаемой поверхности в широком поле зрения и избавиться от необходимости применения широкоугольных объективов без потери углового разрешения. Сам процесс сшивания производится по определенным координатам снимков, однако погрешности измерения координат могут привести к искажениям на местах «склейки», поэтому целесообразно применять алгоритмы перебора не- явно выраженных объектов снимков с последующей идентификацией их и соединением. В связи с наличием продольной ско- рости движения ЛА снимки несколько сдвигаются друг относительно друга в продольном направлении (рис. 4).
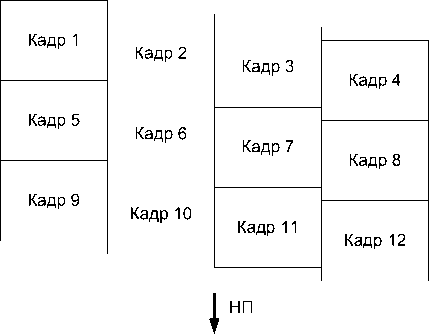
Рис. 4. Сшитые в ленту изображения подкадры (НП – направление полета ЛА)
Наименьшую стоимость эксплуатации на сегодняшний день обеспечивают сверхлегкие летательные аппараты (СЛА), которые и могут стать носителями сканирующего оборудования для сельского хозяйства. Часто СЛА оснащаются импортными системами ориентации и измерения фирм Dynon, Stratomaster и некоторых других. Главным условием использования бортовой измерительной системы СЛА для ориентации зеркала сканера является наличие цифрового выхода и приемлемой точности в определении значений углов в 0,25–0,3 величины мгновенного поля зре- ния аппаратуры. Это стало возможно в последнее время вследствие развития электронных технологий, позволяющих заменить сложные гироскопические приборы простыми твердотельными элементами. В настоящее время выпускается значительное количество приборов для СЛА, выходные данные параметров которых могут быть использованы для управления зеркалом сканера.
Структура интегрированного со СЛА маловысотного тепловизора с адаптивным сканированием – «смотрящей» матрицей представлена на рисунке 5.
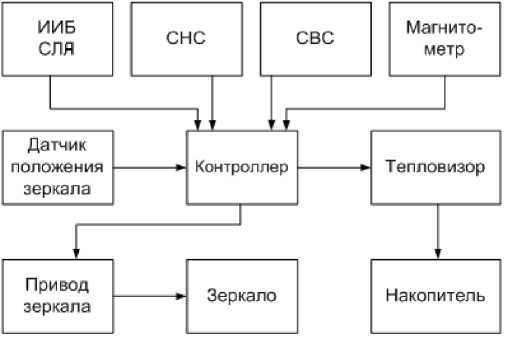
Рис. 5. Структура интегрированного со СЛА тепловизора с адаптивным сканированием
Считается, что тепловизионная аэросъемка объектов оптимально должна выполнятся с малых высот – 100–200 м. Од- нако в действительности высоту сканирования необходимо определять в зависимости от решаемых задач, размеров, темпера- туры объекта, который должен быть исследован, и характеристик приемника излучения. Определение высоты полета для теп-ловизионой съемки местности зависит в первую очередь от максимальной дальности определения объекта измерения. Соответственно высота полета равна:
Н ск = D max cos « ск , (1)
где D – максимальная дальность обнаружения объекта;
аск - максимальный угол отклонения
Целесообразно допустить объект обнаружения плоским «серым» излучателем, с постоянным коэффициентом излучения, трассу наблюдения горизонтальной. Угол между нормалью к поверхности излучения и линией максимального удаления объекта от тепловизионного сканера равен углу максимального отклонения зеркала сканера а . В этом случае высота полета, определенная по максимальной дальности определения объекта [3], будет равна:
зеркала сканера.
об об ц ц c к Т ц ск
П тТ ^ q T A f т Ф пор / т
где τ – коэффициент пропускания передающей камеры тепловизора – определяется по паспортным характеристикам тепловизора;
S – площадь объектива передающей камеры тепловизора;
£ - коэффициент теплового излучения объекта – определяется по таблицам в зависимости от свойств планируемого объекта сканирования;
Т – температура объекта, задаваемая по минимальным требованиям идентификации объекта;
Т =5,67∙10 Вт/(м2 К4) – постоянный коэффициент;
S – площадь объекта, задаваемая по минимальным требованиям идентификации объекта;
К – коэффициент использования теплового излучения объекта и пропускания объекта (зависит от характеристик зеркала сканера);
Х т - коэффициент использования
приемника излучения.
Х 2
К ск
I
X
М е Х
( М е Х ) мах
S, т dX
х а
[ Ме Х dX
НМЛ
X еХ / мах
где М еλ – энергетическая светимость объек-
та;
М
е Х
( ^Ме Х ) мах
функция относительной
спектральной плотности энергетической светимости объекта, которая может быть вычислена по таблицам [2] в зависимости от безразмерного отношения частот:
Х х
X
Xm
где X - частота спектрального максимума
потока излучения, определяемая по закону Вина:
m – допустимое значение отношения сигнал/шум для тепловизора;
q – площадь чувствительной пло-
щадки приемника излучения;
A f г - полоса пропускания частот усилителя фототока;
Ф – порог чувствительности при-
X m = ^ 7 , (4)
Tц где cv = 2,8978-IO"3м К;
S – спектральная характеристика приемника излучения тепловизора, зависящая от спектральных характеристик оптического фильтра, объектива и зеркала;
X , X - границы диапазона длин волн
емника излучения;
чувствительности приемника излучения;
τ – коэффициент пропускания атмосферы в диапазоне частот λ – λ .
Значение τ определяется либо по табличным данным [1], либо по алгоритмам, реализующим метод группового учета аргументов [3].
Коэффициент использования приемника излучения определяется идентично коэффициенту использования теплового излучения, однако, без учета характеристик пропускания атмосферы.
Оптимальная высота сканирования может быть определена для сканера факти- чески один раз и занесена в руководство по эксплуатации (РЭ). В дальнейшем в зависимости от видов объектов изучения и состояния атмосферы высота может выбираться по табличным данным РЭ.
Применение тепловизионных сканеров на оптимальной высоте позволит быстро и эффективно определять всхожесть сельскохозяйственных культур, влажность почвы на небольшой глубине, состояние лиственного покрова и другие операции, позволяющие интенсифицировать сельскохозяйственное производство.
Список литературы Определение высоты сканирования сельскохозяйственных угодий тепловизионными сканерами
- Госсорг, Ж. Инфракрасная термография. Основы, техника, применение. М.: Мир, 1988. -400 с.
- Криксунов, Л.З. Справочник по основам инфракрасной техники. М.: Советское радио, 1978. -400 с.
- Криксунов, Л.З., Падалко Г.А. Тепловизоры. Киев: Техника, 1987. -168 с.
