Оптимальное управление процессами с рециркуляцией взаимодействующих потоков

Автор: Демиденко Николай Данилович, Терещенко Юлия Анатольевна
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Кибернетика, системный анализ, приложения
Статья в выпуске: 5 (31), 2010 года.
Бесплатный доступ
Представлена математическая модель для процессов с рециркуляцией взаимодействующих потоков. Сформулирована задача оптимального управления и получены необходимые условия оптимальности в форме Вейерштрасса. Разработан численный метод решения задачи оптимального управления.
Оптимальное управление, системы с распределенными параметрами, процессы разделения многокомпонентных слоев
Короткий адрес: https://sciup.org/148176317
IDR: 148176317 | УДК: 681.5.01
Optimal control of processes with recirculation of interacting flows
A mathematical model for the processes with recirculation of interactive flows is given. A problem of optimal control is formulated. Necessary optimal conditions in the form of Veyershtrass are obtained. A numerical method of optimization problems solving is developed.
Текст научной статьи Оптимальное управление процессами с рециркуляцией взаимодействующих потоков
Одной из характерных особенностей процессов ректификации является рециркуляция взаимодействующих потоков, что приводит к специфичным граничным условиям в краевых задачах. В этом случае технологический процесс описывается уравнениями в частных производных, а граничные условия – дифференциальными уравнениями с обыкновенными производными [1]. С учетом этих особенностей авторами сформулирована и решена задача оптимального
y‘ = 7 [( w—l—f )Z(2)+ к (У * (x)—У)]- y , yl =Z(2), 0 < t < T, 0 < l < 1,
при краевых условиях:
xt = 1T [(L + F) x + (W — L — F) У — Wxk >Xk, H
управления.
Математическая модель управляемого процесса представлена следующими дифференциальными уравнениями в нормальной форме:
xk
У - a [ y k* ( xk ) - x k ]- x k = 0, 0 < t < T,
l = 0,
x = 7 [(L+L K™
*
+—x+K (y - y (x))+Fф xx
x =^ ,
- X,
xdt = 1Г [L + F — W ]( yd - xd ) Xd ,
H x d
(L + F — W)(yd -y) — L(xd -x) = 0, yd -У -Ed (yd (xd)-У) = 0, 0 < t < T, 1 = 1,
при начальных условиях:
x(l,0) = x0 (l), y(l,0) = y0 (l), 0 < l < 1, xd (0) = xdo, xk (0) = xko, 0 ^ a, Ed ^ 1.
и ограничениях на управления:
( L - L min ) ( L max - L ) - u 2 = 0,
( W - W min )( W max - W ) — Z 2 = 0.
Пусть L , W – оптимальные управления; u , z – соответствующие им (согласно (5)) вспомогательные
управления; x ,
y , xk , xd , yd – оптимальное реше-
Здесь u , z – вспомогательные управления; x , y – концентрации целевого продукта в жидкой и паровой фазах, мольные доли; xf – концентрация целевого продукта в разделяемом сырье, мольные доли; F – поток сырья, кмоль/ч; L , V – потоки жидкости и пара в аппарате, кмоль/ч; Ф x ( l ) - функция распределения потока по длине объекта; Hx , Hy – удерживающие способности аппарата, кмоль/м; Hx , Hx – удерживающие способности в кубе и дефлегматоре, кмоль/м; W – отбор продукта внизу объекта, кмоль/ч; D – отбор целевого продукта вверху объекта, кмоль/ч.
Сформулируем следующую задачу оптимального управления: во множестве кусочно-непрерывных функций L , W , удовлетворяющих условиям (5), найти такие, что соответствующее им решение задачи (1)…(4) дает минимум функционалу
F = JJ (y (l, t)-0* (l, t))2 dldt, где 0* (l, t) - заданное значение концентрации целевого продукта.
Для получения необходимых условий оптимальности в форме Лагранжа–Эйлера рассмотрим вспомогательный функционал [1; 2]:
I = I, +12 = JJ L dldt + J ldt, n an где
L = ( y -0 * ) 2 + e( 1 ) ( x t - X ) + e( 2 ) ( x l - ZС» ) +
+ n( 1 ) ( y t — Y ) + n( 2 ) ( y l -Z( 2 ) ) ,
~ = Xk1)( xkt - Xk ) + 42)( y - xk - a (yk (xk)-xk)) ++ Xd1)(xdt-xd) + Xd2)((L+F- W)(yd -y)-L(xd -x)) +
+ ^ d 3>( y d - y - E d ( y d ( x d )- y ) ) + Y ( ( L - L min )( L max - L )- u 2 ) + + s ( ( W - W mn )( W max - W ) - 2 2 ) ,
ние задачи (1)…(4), соответствующее этим уравнениям; 5 L , 5 W - вариации управлений L , W ; 5 u , 5 z -соответствующие вариации фиктивных управлений u , z ; 5 x , 5 y , 5 x k , 5 x d , 5 y d - соответствующие вариации решений. Тогда, используя аргументацию вариационного исчисления, получим сопряженную задачу относительно функций Лагранжа e , П , X k ) ,
Xw
X d ,
–
n‘
Y , s:
при 0 < t < T , 0 < l < 1
L + L* e t - ^r x
L + F - W
-
H y
- при l = 0,
l-n.
dX^
dt
– при
– при
e‘ = k y (/)U
n ‘ =- k y
0 < t < T
—
X k 1
e
H x
)
V
—
-
l x
n
H y 7
,
e
H x
-
Hni+2 (y-0*);
у 7
x ( 1 )
= 0, H xk
Hk-VL + F - WH- ..=°,
x k 7
= Hr- xki)+X k 2)|- a ( y k ) + a - 17, xk
t = T , 0 < l < 1
e= 0, n= 0,
l = 1, 0 < t < T
^ H ^ + X d 2)7 L -X d E d ( y d ) ‘= 0,
_n + X < 2) ( L + F - W ) + ( 1 - E d ) X < 3) H
l y 7
d Xd _ L + F - W
dt
H x d
= 0,
X d ^-X d2’ L , X < 1)( T ) = 0,
f x(1 )
Ht
l xd
-
Xd ( L + F - W ) -X < 3)= 0;
здесь e( 1 ) , e( 2 ) , n( 1 ) , n( 2 ) — функции, определенные на П ( П = { ( l , t ) |0 < l < 1,0 < t < T } ) ; X k 0, X d ) , y , s - функции, определенные на [ 0, T ] (их можно считать определенными на 9Q ), причем s = X k ) = 0 на 5Q /{ ( l , t ) | l = 0}, Y = X d = 0 на 5Q /{ ( l , t )| l = 1}.
- при 0 < t < T
1 f J ' 0 1
- A x +2L y
Hl Hl
x
y
X( 1 ) X( 1 )
dl - 7T" (x (0, t)-у (0, t))+7T"+ HH
xk
H
xd
+ (yd + xd ) + Xd2)(y (1,t)-yd + xd -x
-Y ( L min + L max - 2 L ) = 0,
-
1 n x( 1 ) x( 1 )
J —Ъ- y ‘ dl — TT- ( y d — x d ) + "77~ ( xk — y (0, t ) ) -
0 H y H x d H x k
- X d 2) ( y ( 1, t ) - y d ) + s ( W . + W max - 2 W ) = 0, у u = 0, s z = 0.
Эти необходимые условия отличаются от известных условий стационарности соотношениями (10). Это отличие связано с тем, что управления L , W являются граничными управлениями, но одновременно входят и в уравнения процесса, так что их вариации в Q и на dQ не являются независимыми.
Теперь получим необходимые условия оптимальности в форме Вейерштрасса. Пусть L , W – оптимальные управления. Приращение функционала, вызванное переходом от оптимальных управлений L , W и соответствующих им решений x , y , xk системы (1)…(4) к произвольным допустимым управлени- ям L = L + AL , W = W + A W и соответствующим им решениям x + Ax, y + Ay , xk + Axk представим в виде
T
A I = J [ A A L + B A W ] dt + JJ s 1 dldt + J s 2 dt ,
Q SQ где
A = 7rJn yd
H y 0
—/ J ^ x ‘ dl + ЧТ X k ( y ( 0, t ) — x ( 0, t ) ) —
H x 0 H xk
( x ( 1, t )— y ( 1, t ) ) ;
H x d
B =
7г j n y d A- ( x k ( t )— y ( 0, t ) ) —-^ d - ( y ( 1, t )— x ( 1, t ) ) ; H y 0 H xk H xd
2 A L , A W , x s
S i =A y + — A x ^ ——A y n i + 0 ( A x ) ; HH
y
x
S 2 = —^ L ( A x ( 1, t ) ^ ( 1, t ) —A x ( 0, t ) ^ ( 0, t ) ) + Hx
+ ^ ( A у ( 1, t ) n ( 1, t ) — A y ( 0, t ) n ( 0, t ) ) +
Hy
■ Л' ( a w A x k —A L A x ( 0, t ) + A W A y ( 0, t ) ) +
H x k k
+ ^ A W ( A y ( 1, t ) —A x ( 1, t ) ) + 0 ( A x ) .
H x d
Здесь A x , A y , A xk определяются из уравнений
Hx A x t — ( L + A L + L ) A x ‘ =
*
= ^L- — k y ( y *) A x + k y A y + x'AL + 0 ( A x ) ,
H y A y t + ( V + A V ) A y ,= k y ( y ) A x — k y A y — y ,A V + 0 ( A x ) ,
0 < l < 1, 0 < t < T , H x A x k = ( L + A L + F ) A x ( 0, t )
—
—
( V + A V ) A y ( 0, t ) + ( W + A W ) A xk + + x ( 0, t ) A L — y ( 0, t ) A V + xk A W ,
A y ( 0, t ) = ^ a ( y k ) — a + 1 jA xk + 0 ( A xk ) , l = 0, 0 < t < T ,
H xd A x ; ( 1, t ) = ( V + A V ) ( A y ( 1, t ) — A x ( 1, t ) ) + + ( y ( 1, t ) — x ( 1, t ) ) A V , l = 1, 0 < t < T ,
A x ( l ,0 ) = A y ( l ,0 ) = A xk ( 0 ) = A x ( 1,0 ) = 0 0 < l < 1,
A V = A L — A W .
Производные A x ‘ , A y ‘ считаем ограниченными.
Для оценки приращений используем следующий результат, легко получаемый из известного неравенства Гронуолла: если
|Ф( t )| < M P 1
t^
+ J(^(T)| + V(T)) dT t0
P1, M = const,
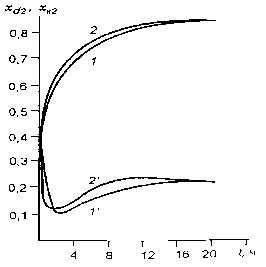
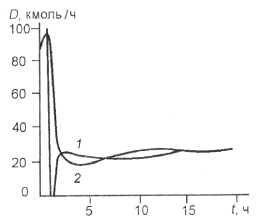
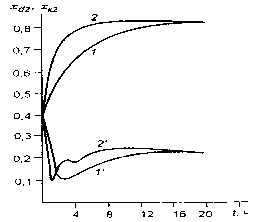
ф(т)> 0, tо тогда f) ф(t)<M1 P1 +|v(t)dT , I 00 M1= const, 10< t< T . Из первого уравнения (12) получим неравенство t |Axk (t)|< N। J(|Axk (T)| + |Ax(0,T)| + IAy(0,T)l)dT + 0 + N2 J(|al (t )| + |a W (t )|) dt, а в силу (17) будем иметь t |Axk (t)|< N3 J(|Ax(0, t)| + |Ay (0, t)|)dt + + N4 J(|AL (t )| + |A w (t )|) dt. Из второго уравнения (12) и (17) следует оценка IAy (0, t )|< N5 J | Ax (0, t)| dt + T + N6J(|AL (t )| + |A W (t )|) dt. Аналогично из (13): t I Ax (1, t )|< N7 J|Ay (1, t)| d t + + N8 J(|AL (t )| + |A W (t )|) dt. Учитывая, что левые части (11) представляют производные вдоль характеристик (с точностью до постоянного множителя), и интегрируя вдоль этих характеристик, получим: | Ax (l, t )|< N9 J (|Ax (l (т), т)| + |Аy (l (т), т)| + t0 + \AL (t)| + |a W (т)|) d т + |Ах (l0,t0)1, | Ay (l, t )|< Nio J(|Ax (l (т), т)| + |Аy (l (т), т)| + t0 , + |AL (т)| + |А W (т)|) d т + |Ах (lO', t0)|, где (l0', t0), (l0", t0) - начальные точки соответствую щих характеристик, 0 < t0, t0 < t, причем t0 = 0 или l0 = 1, 100 = 0 или 100 = 0. Пусть а( t) = max 0<т<t, 0< l<1 | Ax (l, т)| e(t)=mmax lAy(l, т)1. 0<l<1, Тогда из (19) и (20) имеем |Ax(l, t)|< N9 J(а(т) + ₽(т))dт + N9 J|AL(t)|dt + 00 + N7 J ₽(т) d т + N8 J(AL (t )| + |A W (t )|) dt, 00 откуда a(t)< N11 J(а(т) + р(т))dт + N12J(|AL(t)| + |aW(t)|)dt. Аналогично можно получить оценку в(t) Еще раз применим (18): a(t)< N15 J₽(т)dт + N16J(|AL(t)| + |AW(t)|)dt, 00 в(t) < N17Jа(т)dт + N18J(|AL(t)| +1AW(t)|)dt. Интегрируя от 0 до g , учитывая, что при f (т) > 0 J dt \f (т) d т =J d тJ f (т) dt = 0 00 CT = J(g т) f (т) d т< TJ f (т) d т, и заменяя g на t, получим Jа(т)dт< N19J₽(т)dт + N20J(AL(t)| + |AW(t)|)dt, 000 J₽(т)dт< N21Jа(т)dт + N22J(|AL(t)| + |AW(t)|)dt. Подставляя в (21) и еще раз применяя (17), приходим к оценкам вида а( t )< PJ(|AL (t )| + |A W (t )|) dt, T в( t )< p J(|al (t )| + |a w (t )|) dt, откуда I Ax (l, t )|< pJ(|al (t )| + |a W (t )|) dt, (22) T IAy (l, t )|< P J(|AL (t )| + |A w (t )|) dt. Теперь мы можем оценить s1, s2. Обозначая 5(t) = |AL(t)| + |AW(t)|; q - наибольшее количество слагаемых в формулах для е1, е2; 51 - максимум модулей коэффициентов при приращениях в этих формулах, получим: Is, (l,t)| < P21 T5(t)dt | 5,q5(t)PT5(t)dt, IJ0 J 0 |s2 (l, t)|< q515(t) PJ5(t) dt. (23) Сформулируем необходимые условия оптимальности в виде теоремы. Теорема. Если L (t), W (t) - оптимальное управление, x , y , xk – соответствующее решение задачи (1)…(4), то в точках непрерывности управлений A AL + B A W > 0 для всех допустимых приращений AL , A W , или что то же самое, L (t ) = /Lmax при A ( t )< 0, [Lmin при A ( t )>0, W (t) = /^” при B (t)< 0, [Wmin при B (t )>0. Доказательство. Пусть t0– точка, в которой условия (19) нарушаются, например для L (t). Возьмем s > 0 так, что при 10< t< 10+ s A (t )< 2 A (t 0), L ( t )< 2 ( L ( t 0 ) + L max ) в случае А ( t0 )< 0, A (t )> 2 A (t0), L ( t )> 02 ( L ( t0 ) + Lmin ) в случае A ( t0 )>0, и выберем приращения 0 при t e[0,10]U[10+s,T], L max — L ( t 0 ) при t 0 < t< t 0 +S AL (t) = s в случае A (10) < 0, Lmin — L ( t0 ) при t0 < t < t0 +S в случае A (10) > 0, AW (t )=0. Тогда при t0 < t < t 0 +8 A(t)NL(t) < a < 0, для управляющих функций такие же, как в первых пяти вариантах (рис. 3). где a = s , 4 A(t0)(Lmax 44 A (10 )(Lmin - L ( t 0 )) при -L( t0)) при A (t0 )< 0, A (10 )>0, T j[ A NL + BN W ] dt < a 8 jj 81 dtdl < b182 Q T j 82dt < b2 Рис. 1. Графики переходных процессов по концентрации бутана в дефлегматоре и кубе в пусковом режиме: 1, 2 – в дефлегматоре; 1′, 2′ – в кубе; 1, 1′ – при начальном управлении; 2, 2' – при оптимальном управлении; управляющий параметр – отбор вверху колонны где b, b1, b2 - постоянные, не зависящие от 8; NI < a8 + b182+ b282при достаточно малом 8, что противоречит оптимальности управлений L (t), W (t). Аналогично рассматривается случай, когда (24) не выполняется для W (t) . Как видим, доказательство теоремы указывает на способ улучшения управлений, если условия (24) не выполнены. Это позволяет построить итеративный процесс улучшения управлений при нарушении условий (24). В качестве примера рассмотрим задачу оптимизации пускового режима для промышленной колонны К-34. Исходные данные: F = 103,65 кмоль/ч, Fv = 0, D = 27,06 кмоль/ч, L, = 45,21 кмоль/ч, Vd W = 76,59 кмоль/ч, Hv = 50 кмоль, Hv = 30 кмоль, xd xk PH = 3,6 ат, РВ = 3,5 ат. Коэффициенты P1 i, P2i, P3i Рис. 2. Графики оптимальной функции управления (отбор вверху колонны): 1 – в пусковом режиме; 2 – совместно с другими оптимальными управляющими функциями Ld , F, lf , xf2 получены методом наименьших квадратов с использованием таблицы зависимости давления чистых компонентов от температуры. Состав сырья: xf = 0,029 63, xf = 0,222151, xf = 0,143 95, f1 f2 f3 xf = 0,044 52, xf = 0,043 89, xf = 0,420 21, f4 f5 f6 хЛ = 0,096 3 [3]. Выберем целью управления достижение в выходных потоках концентраций компонентов xdiсти xkiст. В этой задаче возмущением является начальное состояние управляемого процесса, при котором концентрации компонентов по длине колонны равны концентрациям этих компонентов в сырье. Время управления Т возьмем 20 ч. Были проведены расчеты шести вариантов задачи оптимизации пускового режима. В первых пяти вариантах задача оптимизации решается с одной управляющей функцией. Значения остальных четырех функций и начальное значение управляющей функции заданы такими же, как и при расчете статического режима (рис. 1, 2). При начальном управлении значение функционала для всех вариантов задачи одинаково: F0= 34,0. В шестом варианте задачи в качестве управляющих взяты все пять параметров. Начальные значения Рис. 3. Графики переходных процессов по концентрации бутана в дефлегматоре и кубе в пусковом режиме: 1, 2 – в дефлегматоре; 1', 2' – в кубе; 1, 1' – при начальном управлении; 2, 2' – при оптимальном управлении; управляющие параметры: отбор вверху колонны, орошение, расход сырья, концентрация бутана в сырье, координата ввода сырья В результате решения было получено, что наиболее эффективной управляющей функцией является Ld (поток орошения) (см. таблицу). Однако следует заметить, что увеличение потока орошения значительно увеличивает энергетические затраты. Следующим по эффективности управляющим параметром является концентрация бутана в сырье xf . Управление этим параметром связано со значительным перераспределением выходных потоков в предыдущей колонне, что не всегда допустимо. Сравнительная оценка управляющих параметров при оптимизации пускового режима колонны uj D FL lL Ld xf2 F ■ min 28,5 29,6 30,4 20,9 26,2 Наименее эффективным управляющим параметром является координата ввода сырья lL , однако изменение этого параметра осуществляется практически без дополнительных энергетических затрат.