Оптимальное управление процессом разделения с ограничениями на потоки

Автор: Демиденко Н.Д., Кулагина Л.В., Никифоров А.Г.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 2 т.12, 2019 года.
Бесплатный доступ
Здесь формулируется задача оптимального управления процессом с распределенными параметрами, при этом учитываются ограничения на управляющие и связанные с ними потоки. Получены необходимые условия оптимальности. Проведен анализ условий стационарности и предложена методика построения области допустимых управлений. Разработанный метод оптимизации применен при автоматизации промышленных ректификационных установок сернокислотного алкилирования изобутана бутиленами, получения ортоксилола и др.
Оптимальное управление, процессы с распределенными параметрами, ректификация, математическая модель
Короткий адрес: https://sciup.org/146281181
IDR: 146281181 | УДК: 62.52; | DOI: 10.17516/1999-494X-0125
Optimal control of the separation process with flow restrictions
Here we formulate the problem of optimal process control with distributed parameters, taking into account the constraints on the control and associated flows. The necessary optimality conditions are obtained. The analysis of the stationarity conditions is carried out and the method for constructing the domain of admissible controls is proposed. The developed optimization method is applied in the automation of industrial distillation plants for the sulfuric acid alkylation of isobutane with butylenes, ortho-xylene production, etc.
Текст научной статьи Оптимальное управление процессом разделения с ограничениями на потоки
В настоящее время мощное развитие получили теория и практика систем с распределенными параметрами [1–9]. Это обусловлено, с одной стороны, наличием современных наукоемких технологий в металлургии, нефтепереработке и нефтехимии, энергетике и других отраслях промышленности, с другой – разработанным перспективным математическим методом анализа гидротермодинамических процессов и систем управления с целью проектирования высокоэффективных производств [10–24]. Произошло весьма продуктивное соединение современного математического аппарата с нуждами практических проблем в промышленности и современными вычислительными технологиями. Важным обстоятельством выступает тот факт, что основу большинства непрерывных промышленных производств составляют процессы тепломассообмена в условиях сложных гидродинамических явлений, например в условиях суперкавитации [11, 13, 23, 24]. Однако совместное рассмотрение и изучение вышеназванных процессов довольно сложная задача, и в последнее время в основном изучают с различных точек зрения теоретические и прикладные задачи раздельно, мало учитывая влияние одних процессов на другие.
Вычислительные технологии объединяют новейшие достижения математических методов с нуждами производства, несмотря на то, что они развиваются самостоятельно, но тем не менее влияют друг на друга. И только в вычислительных технологиях достигается совершенство математических абстракций и реального производства, решаются различные системы уравнений в частных производных в области постановки краевых задач, аналитических и численных методов, вопросы качественного исследования краевых задач и задач оптимального управления. Результатом этого эволюционного процесса могут являться разработанные науч-– 160 – но обоснованные методы расчета основных технологических и конструктивных параметров (геометрических, гидротермодинамических и кавитационных) при проектировании надежных и высокопроизводительных технологических аппаратов в различных отраслях промышленности, в которых происходят процессы тепломассообмена и гидродинамики взаимодействующих потоков. Важными остаются вопросы степени адекватности математического описания этих процессов реальным режимам технологических объектов. Для различных условий адекватность может быть разной. Необходимо, чтобы точность математического описания соответствовала требованиям конкретного производства.
Значимым элементом вычислительных технологий являются системы с распределенными параметрами, которые функционируют в условиях управления, в том числе оптимального. Распределенность параметров процесса требует особых подходов при синтезе систем контроля и управления. В частности, для таких систем естественным образом необходимо применять распределенный контроль и распределенное управление [1–3, 10, 11].
В статье рассматривается задача оптимального управления процессами с рециркуляцией взаимодействующих потоков в ректификационных колоннах. Рециркуляция приводит к тому, что одни и те же управления как граничные, так и «объемные». Поэтому для вывода необходимых условий оптимальности здесь непосредственно применяется метод вариаций; управления предполагаются кусочно-непрерывными, а соответствующие им решения – непрерывными и кусочно-гладкими [1, 2, 11].
|
Постановка задачи |
Рассмотрим следующую модель управляемого процесса:
при l = 1, 0 < t< T: | d2t;) = (L + HF- W) 2d - L2^, 2d (T) - 0, г i xd HL + 2d2)• (L + F - W) + (1 - Ed )2d3) = 0, (20) :^^+«)].!=2rE.G■ *)= 0. Г22+2->l(L+F-W)-2=0; _ Hx d J d d dd , [ HXd J d ’ |
при 0 < t< T: | 1( ^ ^ 21) 21) j - I, x' ' il y'l dl - (X(0, t) - y(0, t)) +т2 (yd - Xd ) + o ( x y J x xd (21) +2d2)(y (1, t) - yd + Xd - x(1, t)) - Y( Amn + Lmax - 2L) = 0, 1 (1) (1) j-nyd+Hk-(xk-y(0,t))-Hd-(yd-xd)-2d2(y(1,t)-yd)+ 0 y xk xd (22) |
+ 2W + Wax - 2W) = 0, yu = 0, ' = 0. 1 2 1 2 (3)
Так как уравнения (21), (22) определяют функции $, п, ^fc1), ^к) ^d), "^О) ’ ^d полностью, то случаи, когда функции γ, ε равны нулю, связаны с дополнительными жесткими условиями на параметры задачи. Поэтому основным случаем следует считать тот, при котором z = 0, и = 0, Y ^ 0, е ^ 0, т.е. W = I¥min, W = I¥maxили W = F(t) + C1, где C 1 = const, L = Lm„, L = Lmax или L = –F(t) + C2, где C2 = const. Условия (13)–(14) можно использовать для построения областей значений оптимальных управлений. В частности, пусть
FUA^L -V
F(t) - D > F (t)+L - V
Область значений управлений W(t) для этого случая приведена на рис. 1. Пусть оптимальное управление W(t) имеет вид, представленный на рис. 2, соответственно этому управлению W(t) на рис. 3 приведена область значений управления L(t). Из этих двух рисунков следует:
1) если W = Wmin, то
maX{Lmin, Vmn + Wmm — F(t)}^ ™in{Lmax, Vmax +Wrnn — F(t)};
2) если W = Wmax, то
max{Lmin, Vmrn + Wmax — F(t)}^ min{Lmax, Vmax + Wmax — F(t)};
3) если W = F(t) – Dmax, то
max{Lmln, Vmn -Dmm}< L(t) < min{Lmax, Vmax — Dmax}.
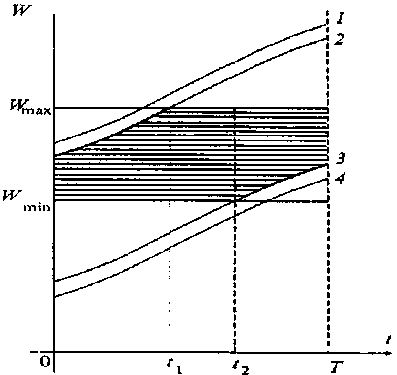
Рис. 1. Область допустимых управлений W: 1 – W = F – Dmin; 2 – W = F+Lmax – Vmin; 3 3 – W = F – Dmax; 4 – W = F + Lmin – Vmax
Fig. 1. The scope of admissible controls W: 1– W = F – Dmin; 2 – W = F+Lmax – Vmin; 3 3 – W = F – Dmax; 4 – W = F + Lmin – Vmax
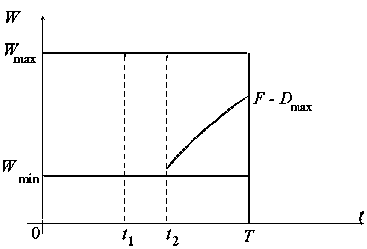
Рис. 2. График оптимального управления отбором внизу колонны
Fig. 2. Schedule optimal control selection column bottom
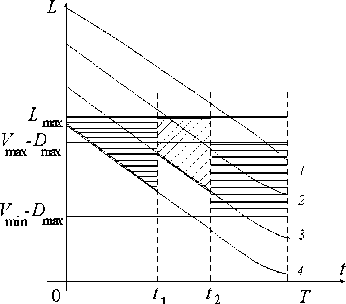
Рис. 3. Область значений управления L при оптимальном управлении W (см. рис. 2): 1 – L = Vmax – F +Wmax;
2 – L = Vmax – F + Wmin; 3 – L = Vmin -F +W max; 4 – L = Vmin – F + Wmin
Fig. 3. The range of values of control L with optimal control W (see Fig. 2): 1 – L = Vmax – F +Wmax;
2 – L = Vmax – F + Wmin; 3 – L = Vmin -F +W max; 4 – L = Vmin – F + Wmin
Пусть теперь график оптимального управления W(t) имеет вид, приведенный на рис. 4. Область изменения управления L(t) построена на рис. 5 при следующих условиях:
1) если W = F(t) + Lmax – Vmax, то L = Lmax;
2) если W = Wmax, то
max{Lmin, V + Wmax - F(t ) L(t) ^ mLmax, Vmax + Wmax - F(t)};
3) если W = F(t) – Dmax, то
max{Lmin, Vmin - Dmax)} ^ L(t) ^ min{Lmax. Vmax Dmax}■
Разработанный метод оптимизации применен при автоматизации промышленных ректификационных установок сернокислотного алкилирования изобутана бутиленами, получения ортоксилола и др. [1, 3, 11].
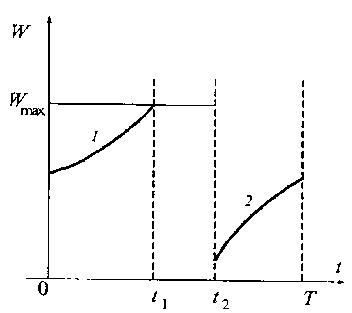
Рис. 4. График оптимального управления W:
1 – L = F + Lmax – Vmin; 2 – L = F – Dmax
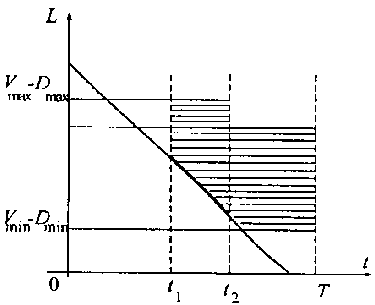
Рис. 5. Область значений управления
L = Vmin – F + Wmax при оптимальном управлении W (см. рис. 4)
Fig. 4. Graph of optimal control W: 1 – L = F + Lmax – Vmin;
2 – L = F – D
max
Fig. 5. Control Value Area L = Vmin – F + Wmax with optimal control W (see Fig. 4)
Благодарность
Исследование выполнено при финансовой поддержке РФФИ и Правительства Красноярского края в рамках научных проектов №№ 18-48-242001, 18-41-242004, 18-41-242008.
Список литературы Оптимальное управление процессом разделения с ограничениями на потоки
- Демиденко Н.Д. Управляемые распределенные системы. Новосибирск: Наука, 1999. 393 с.
- Демиденко Н.Д., Кулагин В.А., Шокин Ю.И. Моделирование и вычислительные технологии распределенных систем. Новосибирск: Наука, 2012. 424 с.
- Демиденко Н.Д., Потапов В.И., Шокин Ю.И. Моделирование и оптимизация систем с распределенными параметрами. Новосибирск: Наука, 2006. 551 с.
- Демиденко Н.Д., Ушатинская Н.П. Моделирование, распределенный контроль и управление процессами ректификации. Новосибирск: Наука, 1978. 285 c.
- Демиденко Н.Д., Кулагина Л.В. Моделирование и оптимизация технических систем с распределенными параметрами. Красноярск: ИПЦ КГТУ, 2006. 210 с.
- Демиденко Н.Д., Кулагина Л.В., Мельник И.Н. Анализ нестационарных режимов в системах контроля и управления распределенными процессами. Вестник СибГАУ, 2006, 2, 89-92.
- Kulagina L.V. Mathematical Modeling of Control Systems for Production Processes with Distributed Parameters. Chemical and Petroleum Engineering, 2007, 43(5-6), 319-322.
- Демиденко Н.Д., Кулагина Л.В. Исследование систем с распределенными параметрами на базе математического моделирования. Химическое и нефтегазовое машиностроение, 2007, 3, 25-27.
- Демиденко Н.Д., Кулагина Л.В. Численное исследование систем с распределенными параметрами. Вестник КрасГАУ, 2007, 2, 103-112.
- Демиденко Н.Д. Моделирование и оптимизация тепломассообменных процессов в химической технологии. М.: Наука, 1991. 240 с.
- Демиденко Н.Д., Кулагин В.А., Шокин Ю.И., Ли Ф.-Ч. Тепломассообмен и суперкавитация. Новосибирск: Наука, 2015. 436 с.
- Демиденко Н.Д., Кулагина Л.В. Численный метод исследования стационарных режимов в технологических печах. Журнал СФУ. Техника и технологии, 2014, 7(1), 55-61.
- Кашкина Л.В., Кулагин В.А., Кулагина Л.В., Стебелева О.П. Изучение эффектов кавитационного диспергирования твердофазных материалов. Энергетика в глобальном мире. Сборник тезисов, 2010. 415-416.
- Demidenko N.D., Kulagina L.V. Optimal Control of Thermal-Engeneering Processes in Tube Funaces. Chemical and Petroleum Engineering, 2006, 42(3-4), 128-130.
- Демиденко Н.Д., Кулагина Л.В. Оптимальное управление технологическими процессами в трубчатых печах. Химическое и нефтегазовое машиностроение, 2006, 3, 8-9.
- Демиденко Н.Д., Кулагина Л.В. Оптимальное управление режимами работы технологических печей в нефтеперерабатывающей промышленности. Фундаментальные исследовании, 2005, 2, 43-44.
- Демиденко Н.Д., Кулагина Л.В. Математическое описание процессов в технологических печах. Вестник СибГАУ, 2005, 238-239.
- Демиденко Н.Д., Кулагина Л.В. Математическое моделирование процессов в технологических печах. Вестник СибГАУ,. 2006, 7, 91-95.
- Демиденко Н.Д., Кулагина Л.В. Численное моделирование технологических режимов в трубчатых печах. Омский научный вестник, 2009, 2, 242-246.
- Кулагина Л.В., Демиденко Н.Д. Особенности моделирования процессов тепломассообмена. Компрессорная техника и пневматика, 2009, 9, 11-13.
- Евстигнеев В.В., Кулагин В.А. Кавитация в технология очистки сточных вод. В мире научных открытий, 2010, 5(11), 87-90.
- Дубровская О.Г., Евстигнеев В.В., Кулагин В.А. Кондиционирование сточных вод энергетических систем и комплексов. J. Sib. Fed. Univ. Eng. technol, 2011 6(4), 629-641.
- Kulagin V.A., P,yanykh T.A. Modeling of processes in supercavitation evaporator with consideration of thermodynamic effects. Chemical and Petroleum Engineering. 2014, 50(1-2), 24-29
- DOI: 10.1007/s10556-014-9848-3
- Kulagin V.A., Stebeleva O. P.,Kashkina L. V., Kulagina L. V. Preparation of carbon-containing nanostructures by cavitation technology. Chemical and Petroleum Engineering. 2011, 46, Issue 11-12, 767-773.
