Оптимальное управление разведением спицы трансформируемого рефлектора при наличии возмущений

Автор: Кабанов С. А., Кабанов Д. С., Никулин Е. Н., Митин Ф. В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4 т.22, 2021 года.
Бесплатный доступ
Одним из перспективных видов космических аппаратов являются крупногабаритные трансформируемые рефлекторы. Такие аппараты доставляются на заданною орбиту в сложенном виде, а затем разворачиваются до рабочего состояния. Большая апертура позволяет значительно расширить возможности антенны. При этом возникают задачи плавного и надёжного раскрытия, настройки формы радиоотражающего сетеполотна, регулировка орбитального положения. Ввиду того что процесс раскрытия занимает длительное время, учёт возмущающих воздействий является важной проблемой. Наличие радиации, большого перепада температур, солнечного ветра оказывает влияние на всю систему и, главным образом, на диаграмму направленности. Также необходимо плавно раскрыть элементы конструкции, так как с увеличением диаметра радиоотражающей поверхности возрастают моменты инерции антенны, что приводит к длительным колебаниям. В данной работе рассмотрен процесс разведения спицы рефлектора при наличии возмущений и ошибок измерений. Решение задачи представлено с использованием теоремы разделения. Для оценивания параметров системы при наличии шумов измерений применен фильтр Калмана. Показана его работоспособность при различных значениях интенсивности шума. В качестве внешних возмущений и шумов измерений выбран случайный процесс типа белого шума. Задача управления решается при использовании алгоритма оптимального управления по иерархии целевых критериев. Показана возможность минимизации энергетических затрат путем интервального включения измерительных датчиков. Представлены результаты численного моделирования.
Алгоритм последовательной оптимизации, крупногабаритный трансформируемый рефлектор, оптимальная фильтрация, математическая модель, моделирование
Короткий адрес: https://sciup.org/148323929
IDR: 148323929 | УДК: 517.977.5-629.783 | DOI: 10.31772/2712-8970-2021-22-4-649-659
Optimal control of deployment of the spoke of a transformable reflector in the presence of disturbances
One of the promising types of spacecrafts is large-size transformable reflectors. Such apparatuses are delivered to a target orbit folded, and then deployed to a working condition. The large aperture allows you to significantly expand the capabilities of the antenna. In this case, the tasks arise of a smooth and reliable deployment, adjusting the shape of a radio-reflecting net, and adjusting the orbital position. Due to the fact that the deployment process takes a long time, accounting for disturbing influences is an important problem. The presence of radiation, large temperature differences, solar wind affects the entire system and mainly on the directional diagram. It is also necessary to smoothly deployment the structural elements, since with an increase in the diameter of the radio-reflecting surface, the moments of inertia of the antenna increase, which leads to prolonged oscillations. In this paper, the process of deployment of the reflector spokes in the presence of disturbances and measurement errors is considered. The solution to the problem is presented using the separation theorem. To estimate the parameters of the system in the presence of measurement noise, the Kalman filter is applied. Its performance is shown at various values of the noise intensity. A random process such as white noise was selected as external disturbances and measurement noises. The control problem is solved using the optimal control algorithm according to the hierarchy of target criteria. The possibility of minimizing energy costs by means of interval switching on of measuring sensors is shown. The results of numerical simulation are presented.
Текст научной статьи Оптимальное управление разведением спицы трансформируемого рефлектора при наличии возмущений
Космические антенны играют незаменимую роль в воздушно-космической связи, военной разведке, зондировании дальнего космоса, глобальном вещании, дистанционном зондировании Земли и прогнозировании климата. Из-за ограничений, накладываемых ракетоносителем, широко используются развертываемые антенны [1–3]. Они размещаются в обтекателе на этапе запуска, после выхода на орбиту начинается процесс развертывания и, наконец, образуются параболические отражающие поверхности. Стабильное и надежное развертывание рефлектора во многом обеспечивает успех космической миссии.
С конца 1960-х гг. крупногабаритные трансформируемые антенны стали активно применяться из-за их большой апертуры и малой массы. В настоящее время Astro Mesh рефлектор является наиболее совершенной и надежной из доступных развертываемых антенн [4; 5]. Процесс развертывания завершается фиксацией фермы и формированием необходимой формы отражающей поверхности.
Для подавляющего большинства таких конструкций раскрытие необратимо и отсутствуют эффективные способы обслуживания и активной корректировки на орбите радиоотражающего сетеполотна. Важно изучить и смоделировать процесс развертывания на стадии проектирования, чтобы получить глубокое представление о динамике развертывания [6]. Сложное кинематическое и динамическое поведение системы, высокие нелинейные напряжения и различные топологии кабельных сетей, а также рассеяние энергии, вызванное трением, демпфированием, и зазоры приводят к значительным воздействиям на динамику развертывания крупногабарит- ных трансформируемых антенн. Активно ведутся исследования в области динамического моделирования при раскрытии различных типов конструкций [7; 8].
Рассмотрим реализацию крупногабаритной космической конструкции с применением вантовой системы для создания необходимой формы радиоотражающей поверхности рефлектора (рис. 1) [9–12]. Крупногабаритный трансформируемый рефлектор (КТР) состоит из космического аппарата (КА) 1 . К нему прикреплены разворачиваемые элементы, такие как солнечные батареи 2 , облучающая система 3 . Для обеспечения заданной диаграммы направленности штанга 4 выдвигает рефлектор 5 на необходимое фокусное расстояние. Отражающей поверхностью является сетеполотно 6 .
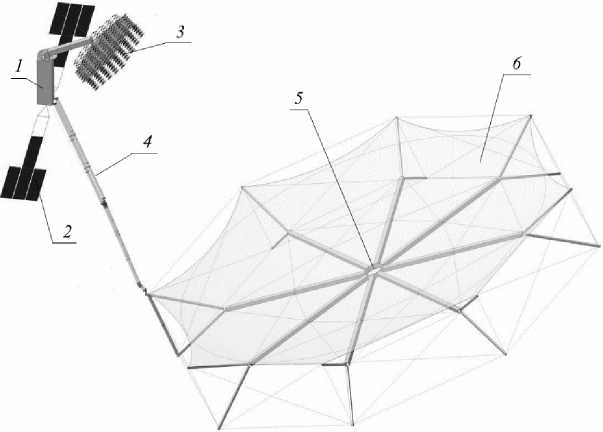
Рис. 1. Конструкция КТР
Fig. 1. The design of the LTR (Large-sized transformable reflector)
Важной проблемой при раскрытии КТР из сложенного положения в заданное с высокой точностью выхода к упорам является учёт возмущающих воздействий. Также необходимо плавно раскрыть элементы конструкции, так как с увеличением диаметра радиоотражающей поверхности возрастают моменты инерции антенны, что приводит к длительным затухающим колебаниям. Наличие радиации, большого перепада температур, солнечного ветра оказывает влияние на всю систему, и главным образом на диаграмму направленности [13; 14]. Поэтому необходимо решать задачи фильтрации и управления раскрытием рефлектора.
Математическое описание задачи
Рассмотрим процесс прямого раскрытия спицы КТР. Необходимо изменить положение спицы на заданный угол φ под действием силы М (рис. 2). Спица жестко закреплена одним концом к КА, вращение осуществляется под действием электрического двигателя.
Математическая модель, описывающая данный процесс, имеет вид X = f ( X , u , t ) + ξ x , где X = (φ ω a 1 V 1 a )T – вектор состояния; ξ x = [ ξ x 1 ξ x 2 ξ x 3 ξ x 4 ]T – воз-
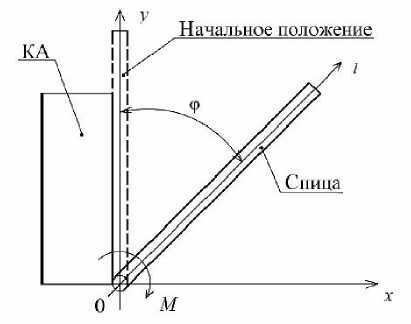
Рис. 2. Разведение спицы рефлектора
Fig. 2. Spreading of the reflector spoke
мущения с интенсивностью B x = diag ( B x 1 , B x 2 , B x 3 B x 4 ); u – вектор управления; t – время; φ – угол поворота спицы; ω – угловая скорость поворота спицы; a 1 и V 1 a – зависящие от времени изгиб и скорость изгиба спицы соответственно. В поэлементном виде система представляется следующим образом [15]:
ф = ®+^ x 1, a M (U, ф, ю) , е ю- I +S x 2,
+
2 M (U , ф , ю )
p Sb . ( L ) R d 4 ,
^( t ) = V a ( t ) + ^ x 3 ,
V1 a (t) =иг ^4 [ a1( t) + Y V1 a (t) ] p S L J где I – момент инерции спицы; E – модуль упругости; Iизг – изгибной момент инерции; ρ – плотность материала спицы; S – площадь спицы в поперечном сечении; l – координата длины спицы; γ – коэффициент затухания; M – общий момент, действующий на спицу: M(U, φ, ω) = Mп(U) – Mтр – Mупор(φ, ω) – Мф(φ, ω); Mп – полезный момент, создаваемый бесколлекторной машиной; U – напряжение питания бесколлекторной машины; Mтр – момент трения; Mупор – момент, создаваемый упором; Мф – момент, создаваемый фиксатором; h(t, l) = a1(t)b1(l) – изгиб спицы [10; 11; 15; 16]; a1(t) – функции только времени t; b1(l) – функции только координаты l; q1 = Z/L, где Z1 = 1,875, L – полная длина спицы; Rd – радиус вала двигателя.
Управление осуществляется за счёт изменения напряжения питания бесколлекторной машины U , | U | ≤ U max ( U max = 12,5 В). Полезный момент зависит от управления U [10] M п = m ф pE 0 U sin 9 / (мр % c ), где m ф - число фаз ротора; p - число пар полюсов магнитного поля; E 0 - действующее значение электродвижущей силы (ЭДС) на обмотке статора; 9 - угол рассогласования (между U и E 0 , для двигателя находится в пределах [0, π/2])); ω p – угловая скорость вращения ротора двигателя; X c – синхронное сопротивление.
Рассмотрим спицу как цилиндрическую трубу. Примем её за однозвенную конструкцию. Измерению доступны угол поворота спицы и изгиб на ее конце. Для задачи разведения спиц уравнения наблюдения рассмотрим в виде z = h ( x, t ) + ^ z ,
где z = [ z 1 z 2 ]T, h ( x , t ) = [φ d ( L )]T, ( d ( L ) = a( t ) b ( L )), ξ z = [ ξ z 1 ξ z 2 ]T – случайные процессы типа белого шума с интенсивностью B z = diag ( B z 1 , B z 2 ).
В соответствии с принципом разделения, задаче управления предшествует задача оценивания вектора состояния по неполным данным, заданным уравнением (2) [17–19]. Оптимальную оценку можно получить с помощью фильтра Калмана, уравнения которого для данной задачи будут иметь вид dt -Ю + R11 Bz1 ( zl *P) + R13 bl ( L ) Bz2 ( z 2
_
\ d),
dd ° = MM + R 21 B - ( z . - ф ) + R 23 b . ( L ) B z 2 (. ddt L = V a + R 31 B z . ( Z 1 - ф ) + R 33 b l ( L ) b ; 2 (
z 2
z 2
ˆ
- d),
ˆ
- d),
dV ˆ
--= - —^ q 4 ( a 1 + Y V 1 a )+^777 v+ dt p S v ' p Sb 1 ( L ) Rd
+ R 41 Bz 1 ( z 1 - *P ) + R 43 b 1 ( L ) Bz 2 ( z 2 - d ) ,
R = f x R + Rf T - Rh T B - 1 h x R + B x , R ( t о ) = R o .
Здесь
f x = d f / d x, h x = d h / d x, h x
0 0 b 1 ( L ) 0
|
0 |
1 |
0 |
0 |
|
|
0 |
0 |
0 |
0 |
|
|
f x = |
0 |
0 |
0 |
0 |
|
0 . |
0 |
EI изг 4 - P S q1 |
EI И q i y p S |
, Rii (t0 ) = 9^Xi, i = 1,n, остальные элементы матрицы начальных ковариаций ошибок оценивания принимались равными нулю.
Спица приводится в движение приводом, в качестве которого рассмотрен бесколлекторный электродвигатель Phytron серии phySPACE [20]. Точность 3–5 % для 1,8º. Для измерения прогиба спицы h используется лазерный сканер RangeVision Standard Plus с точностью ±0,03 мм [21]. В качестве датчика углового положения используется энкодер ЛИР-МА208 [22] с точностью ±1º.
Требуется перевести спицу из начального положения X (0) = (0 0 0 0)T в конечное X ( t f ) = (π/2 0 0 0)T с отсутсвием перерегулирования по углу разворота φ за время t f = 90 c при наличии внешних возмущений ξ x и шумов измерений ξ z .
Постановка задачи управления
Рассмотрим иерархию целевых функционалов вида
J , = V f 1 ( X , t f ), (5)
t f
J 2 = V f 2 ( X , t f ) + J [ f 0 ( X , t) + 0,5( u 2 + u 0 )2 k -2 ] dt , (6)
t 0
где V f 1 = 0,5β 1 [ω( t f ) – ω f ]2; V f 2 = 0,5Δ X f T ρ k Δ X f ; f 0 = 0,5β 2 [φ( t ) – φ f ]2 + 0,5β 3 h 2; α = diag (α 1 , α 2 , α 3 , α 4 ); β 1 , β 2 , β 3 , k – заданные коэффициенты; Δ X f = X ( t f ) – X f , X f = (φ f ω f a 1 f V 1 af )T – заданные конечные значения соответствующих переменных в (1). Так как h ( t , L ) = a 1 ( t ) b 1 ( L ), V 1 a ( t , L ) = V 1 a ( t ) b 1 ( L ), то a 1 ( t ) = h ( t , L )/ b 1 ( L ) и a 1 ( t f ) = h ( t f , L ) / b 1 ( L ).
Решение задачи управления разведением спицы по иерархии критериев в детерминированной постановке подробно представлено в работе [16]. Задача управления также решалась алгоритмами управления по принципу максимума с использованием численных методов Ньютона и Крылова – Черноусько, алгоритмом на основе ПИД-структуры регулирования, алгоритмом коррекции параметров структуры управления [10; 11; 15]. Применение алгоритма последовательной оптимизации по иерархии целевых критериев позволяет решать задачу в режиме реального времени с отсутствием длительных затухающих колебаний после достижения спицей заданного угла разворота. С помощью данного алгоритма удаётся добиться необходимой точности и качества регулирования системы.
Моделирование
Примем время раскрытия спицы tf = 90 с, максимальная допустимая амплитуда прогиба hmax = 10 мм. Значение коэффициента затухания γ = 0,04 с. Число фаз ротора mэ = 2, число пар полюсов магнитного поля p = 2, действующее значение ЭДС на обмотке статора E0 = 2,5 В, синхронное сопротивление Xc = 22∙10–3 Ом, угол рассогласования между полем ротора и статора 3 = п/10 при любой нагрузке, top =247 рад/с.
Были приняты следующие параметры спицы при моделировании [10]: материал АБС пластик QHF – 0140: плотность материала ρ = 1600 кг/м3, модуль упругости (Юнга) E = 1,2∙1011 Па, длина спицы a = 9,75 м, масса спицы (всех вложенных звеньев) m = 32 кг. Рассматривается спица с сечением в виде кольца с внешним радиусом R = 0,26 м и внутренним радиусом r = 0,25 м. Момент инерции I будет равняться I = mR 2 /2 + ma 2 /3 = 1015,4 кг • м2. Изгибной момент инерции I изг = π R 3δ = 5,52∙10–4 м4, где δ – толщина стенки трубы (спицы).
Примем, что возмущения не превышают ±1 % от максимальных значений соответствующих переменных. В расчетах шумы ξ x и ξ z принимались белыми с интенсивностями B x = diag (0,02, 0, 0.0001, 0), B z = diag (0,02, 0,0005) соответственно. Начальные значения ошибок оценивания задавались в виде: <р( t 0) = ф( t 0) + А ф( t 0), to( t 0) = to( t 0) + A to( 1 0), a 1 ( t 0) = a 1 ( 1 0) + А a 1 ( 1 0), V a ( 1 0 ) = V a ( 1 0 ) + А V a ( 1 0 ), где Аф( 1 0 ) = 0,1 рад, Ato( 1 0 ) = 0,002 рад/с, A a i ( 1 0 ) = 5 • 10-5 м, Δ V 1 a ( t 0 ) = 0,01 м/с.
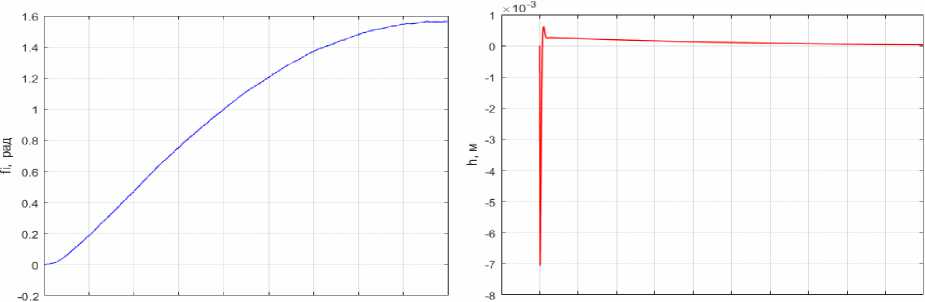
На рис. 3 представлены результаты моделирования: графики зависимостей φ( t ) (на всем интервале оптимизации) и h ( t ) (на первых 10 с). Видно, что удалось решить поставленную задачу, т. е. раскрыть спицу из начального положения на заданный угол π/2.
O 10 20 30 40 50 во /□ 80 90 -1 0 1 2 3 4 5 6 7 8 9 10
t. c t, c а б
Рис. 3. Графики: a – φ( t ); б – h ( t )
Fig. 3. Graphics: a – φ( t ); b – h ( t )
Максимальный прогиб спицы h ( t ) = 7∙10–3 м наблюдается в начальный момент времени, в дальнейшем он плавно стримится к нулю. При использовании алгоритма последовательной оптимизации по иерархии из двух целевых критериев механизмы упора и фиксатора из-за плавного подхода к конечному состоянию не приводят к дополнительным колебаниям развернутой антенны.
При выбранных возмущениях и шумах измерений алгоритмы оптимальной фильтрации и управления успешно решают поставленную задачу. Отклонения начальных значений переменных величин допустимо выбирать из диапазона ±7 % от максимальных значений соответствующих величин, в противном случае требуется корректировка весовых коэффициентов.
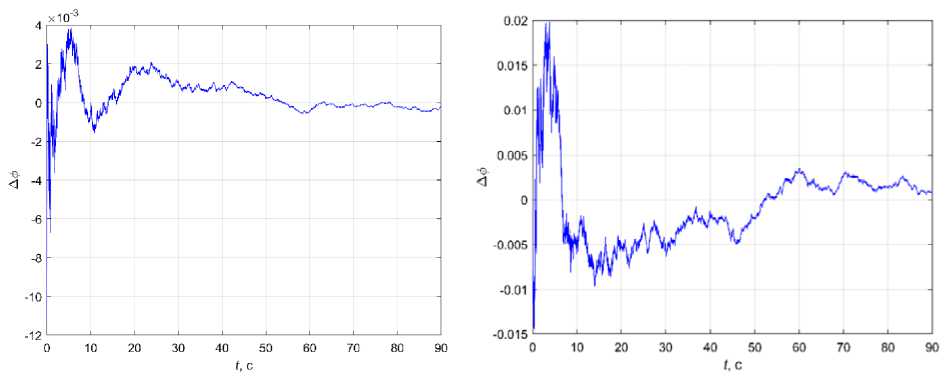
На рис. 4, а показан график изменения ошибки оценивания Δφ при Bz = diag(0,02, 0,0005) и при отсутствии внешних возмущений. На рис. 4, б показана аналогичная кривая при увеличении интенсивности Bz втрое. Наибольшая ошибка достигается в начале моделирования, затем она стремится к нулю (в том числе и для других Δφ(t0)). При наличии внешних возмущений ошибки имеют математическое ожидание равное нулю и дисперсию, не превышающую дисперсию возмущений.
б
а
Рис. 4. Графики Δφ при различных уровнях интенсивности шума
Fig. 4. Graphics of Δφ at different levels of noise intensity
На рис. 5 представлены диагональные элементы матрицы ковариации при R 11 (0) = 0,017; R 22 (0) = 0,0002; R 33 (0) = 0,001; R 44 (0) = 0. Достаточно быстро они приходят к установившемся значениям. Было проведено моделирование при различных начальных значениях диагональных элементов матрицы ковариации и разной интенсивности шумов измерений, фильтр Калмана успешно отработал все варианты.
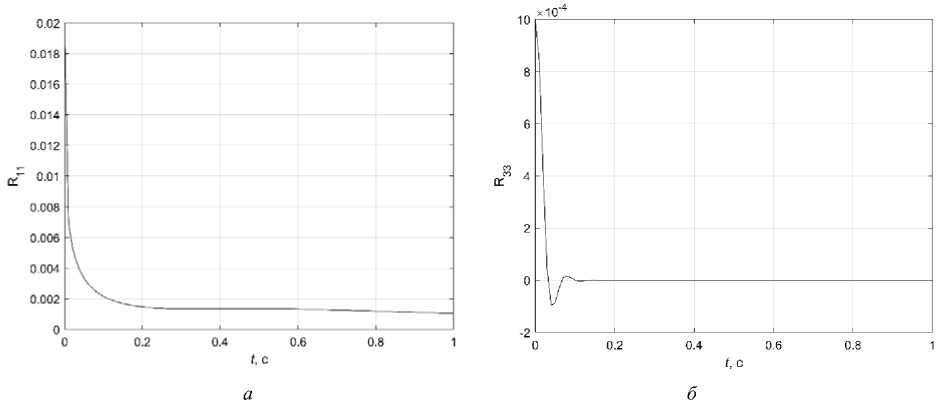
Рис. 5. Графики: а – R 11 ( t ); б – R 33 ( t )
Fig. 5. Graphics: a – R 11 ( t ); b – R 33 ( t )
Для минимизации энергетических затрат было предложено периодически отключать работу датчиков и оценку состояния на этих участках вычислять путем прогнозирования с использованием уравнений (3), (4) при B Z1 = 0 и В - = 0. Это позволило успешно решать задачу управления при меньших энергетических затратах. При отключении датчиков не затрачивается энергия на их функционирование и передачу данных.
На рис. 6 представлен график R 11 ( t )
4 =- R 112 B z 1 - 1 — R 132 b. B z 2 - 1 + 2 R 12 + B x 1
при периодическом отключении измерений с датчиков. Каждый раз при включении измерений элементы ковариационной матрицы достигают установившегося значения. В уравнении для R 11 слагаемые R 11 2 B z 1 - 1 и R 13 2 b 1 B z 2 - 1 характеризуют скорость поступления информации, их отсутствие при отключении измерений приводит к возрастанию R 11 .
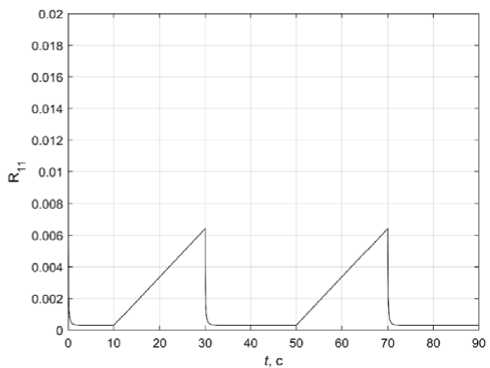
Рис. 6. График R 11 ( t )
Fig. 6. Graphic R 11 ( t )
Для успешного решения задачи и точного выполнения терминальных условий необходимо включение датчиков измерения состояния системы на конечном отрезке интервала оптимизации. Чем больше время включения датчиков в конце моделирования, тем точнее удаётся решить поставленную задачу. Определение оптимального интервала включения измерений является самостоятельной научно-технической задачей. При возрастании интенсивности внешних возмущений B x необходимо измерять состояние системы более длительное время. При заданном B x = diag (0,02, 0, 0,0001, 0) для успешного решения задачи достаточно включения датчиков на участке с 85 по 90 с. При увеличении значений возмущений вдвое необходимо увеличить время наблюдений на конечном участке до 15 с. Время работы датчиков зависит от вида и интенсивности внешних возмущений, требований к величине допустимых энергетических затрат. В результате статистического моделирования оценка математического ожидания критерия (5) M ( J 1 ) = 0, критерия (6) M ( J 2 ) = 0,035, где для одного из вариантов получено следующее значение φ( t f ) = 1,576.
Отдельной задачей стоит определение времени отключения датчиков измерения углового положения спицы и величины прогиба независимо друг от друга. Так, для выполнения терминального условия по углу φ при заданных возмущениях необходимо осуществлять наблюдение последние 5 с моделирования, тогда как для выполнения требований для прогиба h достаточно 3 с наблюдений. Величины φ и h зависят от приложенного момента М . Значение h в конце раскрытия при выбранном управлении не превышает 5∙10–5 м, что соответствует точности датчика. Поэтому значением прогиба в конечный момент времени можно пренебречь.
Заключение
В результате проделанной работы было подтверждено решение задачи оптимального управления стохастической моделью раскрытия спицы КТР по неполным данным с использованием принципа разделения. Использование алгоритма последовательной оптимизации при полученных оцененных с помощью фильтра Калмана данных позволило решить поставленную задачу при различных интенсивностях возмущений и шумов измерений. Интервальное выключение измерений позволяет снизить энергозатраты на питание датчиков и обработку измерений. Дальнейшие работы предполагают поставить и решить задачу оптимизации интервалов наблюдений для минимизации энергетических затрат [23].
Представленные исследования доложены на XXII Международной научной конференции «Системный анализ, управление и навигация» [24].
Список литературы Оптимальное управление разведением спицы трансформируемого рефлектора при наличии возмущений
- Puig, L., Barton, A., Rando, N. A review on large deployable structures for astrophysics missions. Acta Astronautica. 2019. Vol. 67(1). P. 12-26.
- Полянский И. С., Архипов Н. С., Мисюрин С. Ю. О решении проблемы оптимального управления адаптивной многолучевой зеркальной антенной // Автомат. и телемех. 2019. № 1. С. 83-100.
- Статический и модальный анализ силовой конструкции прецизионного крупногабаритного антенного рефлектора из полимерных композиционных материалов / А. Ю. Власов, Н. А. Амельченко, К. А. Пасечник и др. // Сибирский журнал науки и технологий. 2017. № 4. С. 897-901.
- Nie R., He B., Zhang L. Deployment dynamics modeling and analysis for mesh reflector antennas considering the motion feasibility // Nonlinear Dyn. 2018. Vol. 91. P. 549-564.
- Thomson M. W. The AstroMesh Deployable Reflector. IUTAM-IASS Symposium on Deployable Structures: Theory and Applications. 2000. P. 435-446.
- Dynamics of a deployable mesh reflector of satellite antenna: form finding and modal analysis / P. Li, C. Liu, Q. Tian // J Comput. Nonlinear Dyn. 2016. Vol. 11(4). P. 549-564.
- Резник С. В., Чубанов Д. Е. Моделирование динамики раскрытия крупногабаритного трансформируемого рефлектора космической антенны из композиционного материала // Вестник Рос. ун-та дружбы народов. Серия: Инженерные исследования. 2018. Т. 19, №. 4. С. 411-425.
- Бакулин В. Н., Борзых С. В. Моделирование динамики процесса раскрытия крупногабаритных трансформируемых космических конструкций // Изв. высш. учебн. завед. Авиационная техника. 2020. № 4. С. 50-56.
- Разработка расчетно-экспериментального метода модального анализа / В. А. Бернс, В. Е. Левин, Д. А. Красноруцкий и др. // Космические аппараты и технологии. 2018. Т 2, № 3(25). С. 125-133.
- Кабанов С. А., Зимин Б. А., Митин Ф. В. Разработка и анализ математических моделей раскрытия подвижных частей трансформируемых космических конструкций. Ч. I // Мехатрони-ка, автоматизация, управление. 2020. Т. 20, № 1. C. 51-64.
- Kabanov S. A., Mitin F. V. Optimization of the stages of deploying a large-sized space-based reflector // Acta Astronautica, Special Issue on 6th SFS 2019. 2020. Vol. 176. P. 717-724.
- Development for petal-type deployable solid-surface reflector by uniaxial rotation mechanism / H. Huang, Q. Cheng, L. Zheng, Y. Yang // Acta Astronautica. 2021. No. 178. P. 511-521.
- Ишков В. Н. Воздействие солнечных активных явлений на околоземное космическое пространство и возможность их прогноза // Сложные системы. 2012. № 4 (5). С. 21-41.
- Влияние солнечной активности на магнитосферу Земли / Б. Б. Михаляев, С. Б. Дертеев, И. Ю. Лагаев, Т. Т. Осмонов // Актуальные проблемы современной физики и математики. 2017. С. 92-97.
- Кабанов С. А., Митин Ф. В. Оптимизация процессов раскрытия и создания формы трансформируемого рефлектора космического базирования // Изв. РАН. ТиСУ. 2021. № 2. С.106-125.
- Кабанов С. А., Кабанов Д. С. Управление разведением спиц крупногабаритного трансформируемого рефлектора с использованием алгоритма последовательной оптимизации // Ме-хатроника, автоматизация, управление. 2021. № 22(8). С. 433-441.
- Справочник по теории автоматического управления / под ред. А. А. Красовского. М. : Наука, 1987. 712 с.
- Кабанов С. А. Оптимизация динамики систем при действии возмущений. М. : Физмат -лит, 2008. 200 с.
- Кабанов Д. С. Оптимальное управление ядерным реактором с учетом случайных возмущений // Приборостроение. 2009. № 5. С. 27-30.
- Микропривод [Электронный ресурс]. URL: http://www.microprivod.ru/catalog/phytron/ seriya-vssspase-dlya-rabotyi-v-kosmose,diametr-19-125-mm.html (дата обращения 10.10.2021).
- Пинтер-Плоттер.ру [Электронный ресурс]. URL: https://printer-plotter.ru/3d-oborudovanie/ 3d-scanners/rangevision/?yclid=5975775935832053836 (дата обращения 10.10.2021).
- СКБ ИС [Электронный ресурс]. URL: http://www.skbis.ru/index.php?p=3&c=18&d=128 (дата обращения 10.10.2021).
- Малышев В. В., Красильщиков М. Н., Карлов В. И. Оптимизация наблюдения и управления летательных аппаратов. М. : Машиностроение, 1989. 312 с.
- Оптимальное управление разведением спицы трансформируемого рефлектора при наличии возмущений / С. А. Кабанов, Д. С. Кабанов, Е. Н. Никулин, Ф. В. Митин // Системный анализ, управление и навигация : тез. докладов. М. : Изд-во МАИ, 2021. С. 168-169.
