Оптимальные и квазиоптимальные алгоритмы различения импульсных сигналов

Автор: Васильев К.К., Капустин Д.А.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии телекоммуникаций
Статья в выпуске: 2 т.6, 2008 года.
Бесплатный доступ
В статье рассматриваются оптимальные и квазиоптимальные алгоритмы различения импульсных тональных сигналов кода Морзе на фоне белого шума. Проводится анализ эффективности различения на основе аналитических расчетов и на основе математического моделирования предложенных алгоритмов.
Короткий адрес: https://sciup.org/140191224
IDR: 140191224 | УДК: 621.391
Optimal and quasioptimal algorithms of distinguishing impulse signals
There are considered optimum and quasi-optimal algorithms of distinction of pulse voice-frequency signals of the Morse code on a background of white noise in the clause. Carry out analysis of discrimination efficiency on basis of analytical calculation and using mathematical modeling offered algorithms.
Текст научной статьи Оптимальные и квазиоптимальные алгоритмы различения импульсных сигналов
Вопросы анализа потенциальной помехоустойчивости приема импульсных тональных сигналов кода Морзе на фоне белого шума рассматривались в ряде работ [1-4]. Однако, при этом предполагалось, что частота, амплитуда, длительность и время прихода сигнала точно известны, замирания отсутствуют и помехой является только белый шум. В настоящей работе находится структура оптимального приемника полностью известного сигнала, наблюдаемого на фоне белого шума, и выяснение основных особенностей процесса различения гипотез. После этого обобщается решение на случай замирающего некогерентного сигнала.
Синтез и анализ оптимальных алгоритмов
Рассмотрим статистический синтез оптимальных алгоритмов различения трех возможных гипотез для приема импульсных сигналов: H 0 – отсутствие сигнала (пауза); H 1 – передача сигнала «точка» длительностью τ 0 ; H 2 – передача сигнала «тире» длительностью 3τ 0 . Будем считать, что принимаемый сигнал на интервале времени 0 ≤t≤T имеет следующий вид:
-
- при гипотезе H 1
U ( t ) = U 1 ( t ) + n(t), U 1 ( t ) = U 0 cos ^ 0 t, 0 < t < т 0 ;
-
- при гипотезе H 2
U(t) = U2 (t) + n(t), U2 (t) = U0 cos^0t, 0 < t < 3т0, где n(t) - белый шум со спектральной плотностью N0 . Предполагая, что априорные вероят- ности гипотез и потери, связанные с неверными решениями, одинаковы, приходим к следующему правилу различения сигналов. Вычислим апостериорные вероятности каждой из трех гипотез:
⎛ T ⎞
P(U(t),0 < t < T ) = K o expl - — Ju 2 (t)dt I,
⎝ N 0 0 ⎠
P 1 ( U (t),0 < t < T ) = K 0 exp
⎛T
- IT J ( U (t) - U- (t) )
⎝ N 0 0

P , (U(t),0 < t < T ) = K o exp
⎛T
- 7Г J ( U (t) - U'(t ) )
⎝N 0 0

где K 0 – коэффициент, не зависящий от номера гипотезы. Оптимальное байесовское правило принятия решения заключается в сравнении этих апостериорных вероятностей и выбора номера гипотезы наибольшего из чисел.
После элементарных преобразований рассмотренная процедура приводится к следующему виду. Найдем по реализации U ( t ), 0 < t < T два числа
L = 0 U ( t )U, ( t ) dt -1 0 U 2 ( t ) d[t, ОО 2 0
3τ 0 3τ 0 (1)
L2 = Ju ( t ) U2 ( t ) dt — Ju 2 ( t ) dt .
0 2 0
Гипотезы H0 , H1 или H2 выбирают ся соответственно большему из трех чисел
L 0 = 0, L 1 или L 2 .
Определим вероятностные характеристики оптимального алгоритма различения сигналов. Найдем условные математические ожидания и дисперсии статистик L 1 и L 2 при гипотезах H 0 ,
H i и H 2 : M { L i /H 0 } = -E i , M^/H 0 } = -3 ^ ,
M { L , /H i } = E , M { L /H i } = -2 E 1 , M { L i /H 2 } = E ,
M {L2 /H2} = 3E1. Апостериорные дисперсии ста тистик L1 и L2 при всех гипотезах одинаковы: ⎧⎛τ0 ⎞2 ⎫ j"n(t)U0 cos a0td
D { L 1 } = M <
⎝ 0
⎬ = 0,5U 02 N 0 τ 0 ,
D { L 2 } = 0,5U o2 N o 3 т 0 .
После выполненных преобразований найдем условные вероятности ошибочных решений. Для справедливой гипотезы H 0 ошибка произойдет, если будет выполнено хотя бы одно из двух неравенств: L 1 > 0, L 2 > 0, т.е. вероятность ошибочного решения
P ( H 0 ) = P { L i > 0 } + P { L > 0 } -
- P { L 1 > 0, L 2 > 0 } ,
∞ где P{L > 0} = Jto(L /H0) dL;
P { L 2 > 0 } = j ю ( L 2 /H 0 ) dL 2 ;
P { L 1 > 0, L 2 > 0 } = jj to ( L 1 , L 2 /H 0 ) dL 1 dL 2 ;
to ( L 1 , L 2 1H 0 ) — двумерная нормальная плотность распределения статистик при гипотезе H 0 , с найденными математическими ожиданиями, дисперсиями и ковариацией
B(L,LjНо) = M{(L -M{L/Но})х
х(L2 -M{L2IНо})} =
= M ^
τ 0 τ 0
J Jn(t)п(т)U02 cosro0t cos гоотdtdT
0∞
P { L 1 < 0, L 1 < L 2 } = J J to ( L 1 , L 2 /H 1 ) dL 2 dL 1 .
-∞ L 1
Числовые характеристики нормального распределения to ( L 1 , L 2 (Hx ) находятся аналогично. Наконец вероятность ошибочного решения при условии справедливости гипотезы H 2 находится с помощью следующих соотношений
P (H2) = P {L2 < 0} + P {L2 < L1} -
- P { L 2 < 0, L 2 < L 1 } , (4)
где P { L 2 < 0 } = J ro ( L 2 /H 2 ) dL 2 ,
-∞
P { L 2 < L 1 } = J J ro ( L 1 , L 2 /H 2 ) dL 1 dL 2 ,
-∞ L 2
0∞
P { L 2 < 0, L 2 < L 1 } = J J ro ( L 1 , L 2 /H 2 ) dL 1 dL 2 .
-∞ L 2
Полученные результаты позволяют провести анализ вероятностей ошибок для случая полностью известного сигнала, т.е. определить потенциальные характеристики алгоритмов различения импульсных сигналов. Основной энергетической характеристикой такой системы является отношение сигнал/шум, приведенное, например, к сигналу «точка»:
_ (M№0})2 _ ид q d{l} 8N0 .
По полученным формулам (2) - (4) были построены графики зависимостей вероятностей правильного решения гипотез H 0 , H 1 и H 2 от отношения сигнал/шум, которые представлены на рис. 1.
= 0 , 5U о2 N o T 0 .
Таким образом, полученные формулы позволяют найти вероятность ошибочного решения при гипотезе H 0 . Точно так же для гипотезы H 1 вероятность ошибочного решения можно определить по формуле
P(Hi) = P{L < 0} + P{L < L2} -
- P { L < 0, L < L 2 } ,
∞ где P{L1 < 0} = Jю(L1 /H1)dL1,
∞∞
P { L 1 < L 2 } = J J to ( L 1 , L 2 [H 1 ) dL 2 dL 1 ,
-∞ L 1
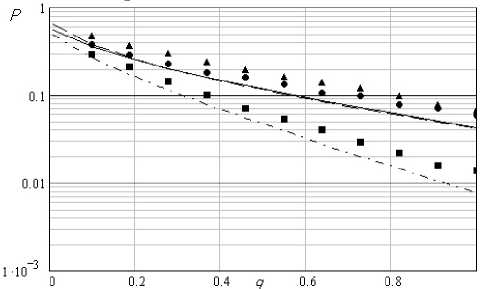
Рис.1. Зависимости вероятностей ошибочного решения от уровня полезного сигнала для гипотезы H 0 (сплошная линия), H 1 (пунктирная) и H 2 (штрих-пунктирная)
Так же на этом графике представлены вероятности ошибочного решения, полученные на основе моделирования работы оптимального алгоритма различения сигналов. На графике кружками показана вероятность ошибочного решения для гипотезы H 0 , треугольниками - для гипотезы H 1 , квадратиками - для гипотезы H 2 .
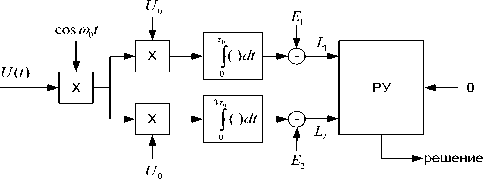
Рис. 2. Корреляционный приемник известных сигналов
Существует два варианта технической реализации найденного правила различения сигналов на основе корреляционного приемника или согласованных фильтров. В первом случае схема содержит синхронный детектор, два коррелятора, вычитающее и решающее устройство (РУ). При этом осуществляется вычитание половины ожидаемой энергии
-
1 Т
E = - JU 12 (t)dt = -( U о2 т о /2 ) ,
-
2 0
3τ 0
e2 =- Ju 2 ( t ) dt = -(u 2 3t0 /2)
-
2 0
из корреляционного интеграла. Фильтровой вариант реализации предполагает наличие двух фильтров (СФ1 и СФ2), согласованных с прямоугольными импульсами длительностью τ 0 и 3τ 0 .
E 1
E 2
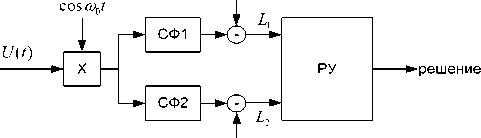
Рис. 3. Оптимальный прием известных сигналов на основе согласованной фильтрации
Был предложен квазиоптимальный алгоритм различения элементов кода Морзе, который представлен на рис. 4.
Элементы кода Морзе представляются в виде ШИМ-сигнала. Тогда при дешифрации требуются измерения четырех интервалов времени: длительности символов «точка» (T) и «тире» (3T) длительности бестоковых посылок между бук- вами (3T) и словами (5T) . Для определения границ импульсов и пауз следует воспользоваться классическим правилом измерения длительности одиночного импульса (по уровню 0.5 от амплитуды импульса).
Поскольку вершины импульсов и бестоковые участки под воздействием шума имеют значительную нестабильность, то следует определить наиболее вероятное значение амплитуды импульсов. Для этого строится гистограмма входного сигнала, по которой и определяется амплитуда ШИМ-сигнала. Нахождение уровня равноотстоящего от вершины импульсов и их основания позволяет определить длительность символов «точка» и «тире», а так же длительности бестоковых посылок между буквами и словами.
Измерив параметры ШИМ-сигнала, можно представить его в виде АИМ-сигнала, амплитуда которого определяется площадью импульсов ШИМ-сигнала. Таким образом, амплитуда АИМ-сигнала пропорциональна длительности элементов кода Морзе. Переход к АИМ-сигналу позволяет сформировать вектор, элементами которого являются длительности элементов кода Морзе.
Для принятия решения о том, что принятый сигнал является сигналом с кодом Морзе, следует определить ошибку отклонения символов «точка» с длительностью T , символа «тире» с длительностью 3 T , бестоковой посылки между символами с длительностью T и бестоковой посылки между буквами с длительностью 3 T от ожидаемых значений, полученных на предыдущем этапе распознавания. Ошибка отклонения вычисляется как среднее значение относительной ошибки длительностей принятого символа и ожидаемого. Вычисленная ошибка отклонения сравнивается с заданным порогом и по результату сравнения принимается решение о соответствии принятого сигнала коду Морзе.
Поскольку длительности элементов кода Морзе меняются в процессе передачи, то при каждом положительном приеме кода Морзе значение символа «точка» обновляются. Тем самым, обеспечивается подстройка к параметрам входного сигнала.
На рис. 5 представлены зависимости вероятностей ошибочного решения для гипотез H1 и H2 по результатам моделирования оптимального и квазиоптимального алгоритмов. По результатам моделирования оптимального алгоритма построены сплошной линией зависимость вероятности ошибочного решения для гипотезы H1 , пунктирной – для гипотезы H2 . Так же на этом графике по результатам моделирования квазиоп- тимального алгоритма представлены зависимости вероятностей ошибочного решения для гипотез H1 и H2 (треугольниками и квадратами).
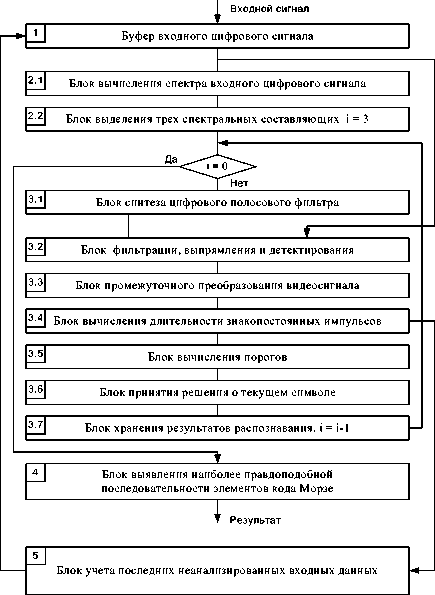
Рис. 4. Квазиоптимальный алгоритм различения элементов кода Морзе
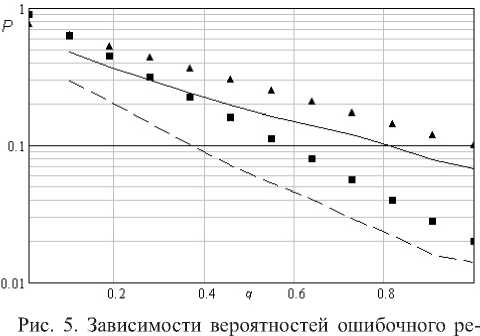
шения от уровня полезного сигнала для гипотезы H 1 и H 2
Рассмотренное решение задачи различения сигналов оптимально, если точно известна длительность τ0 импульсного сигнала. Однако, как правило, τ0 задается диапазоном значений (т0min,т0max). Соответственно и при гипотезе H2 длительность информационного сигнала «тире» может лежать в диапазоне ( 3 т0min ,3т0max). В этом случае возможны два подхода к решению задачи: оценка τ0 по наблюдениям и подстановка в решающее правило или применение решающего правила для различения сложных гипотез H1, H2. Воспользуемся вторым подходом.
Процедура обнаружения-различения сложных гипотез будет состоять из следующих этапов. Вначале осуществляется проверка гипотезы H 0 при альтернативе H 1 или H 2 на интервале τ 0 . В случае отклонения гипотезы H 0 осуществляется оценивание длительности сигнала τ по методу максимального правдоподобия. Полученная оценка Т сравнивается с серединами интервалов τ 0 и 3τ 0 . Если τ ближе к τ 0 , то выбирается гипотеза H 1 , в противном случае – H 2 .
В предложенном алгоритме необходимо найти оценку Т по методу максимального правдоподобия. Для этого запишем функцию правдоподобия
T
- — ( U ( t ) - U ( t ,т) ) 2 dt
Ю(U(t)/т) = Koe N00 , где U(t,T) = U0 cosoj, 0 < t < т; т < T; T - интервал наблюдения. Максимуму функции соответствует минимум выражения
T
— J( U ( t ) - U ( t , T ) ) dt N 0 0
или максимум
L ( t ) =

U ( t ) -1 U ( t , t )| U ( t , t ) dt.
Поскольку в рассматриваемом случае прямоугольного сигнала не существует производной dL(T)/dT, то оптимальная оценка T должна находиться непосредственно на основе максимизации L(t). Процесс поиска такой оценки иллюстрируется на рис. 6. При изменении параметра τ математическое ожидание функции L(t) линейно растет и достигает максимума при т = ти. После этого M {L(T)} уменьшает -ся. На рис. 6 показаны характерные значения M {L(t)} . С учетом помех максимум L(t) будет зафиксирован в точке T, отличающейся от ти на величину случайной ошибки £ = Т - ти. Для нахождения дисперсии этой ошибки и, следовательно, рабочих характеристик алгоритма различения сигналов можно воспользоваться неравенством Рао-Крамера. Как известно, минимально достижимая дисперсия ошибки оце- нивания, соответствующая методу максималь- ного правдоподобия, находится по формуле
Т(Т ),
σ ε 2
где
инфор-
мация относительно т, содержащаяся в U ( t ) , 0 ≤t≤T (по Фишеру).
В нашем случае
( 2
I ( т ) = M 11 — J( U ( t ) - U ( t , т ) )
⎪⎩⎝ N 0 0
dU ( t , t ) dt
∂ τ
4 г г
= M1 172 f Jn ( t' ) n ( t 2 )
1 v n n
0 00
dU ( t 1 , t ) dU ( t 2 , t )
∂ τ ∂ τ
dt 1 dt 2 ⎬ =
На рис. 7 приведены зависимости дисперсии ошибки оценивания длительности, полученные по формуле (5) и на основе нахождения оценки длительности импульса по методу максимального правдоподобия. На графике сплошной линией показана дисперсия ошибки оценивания длительности символа «точка», пунктирной – символа «тире»; кругами и треугольниками – практические зависимости дисперсии ошибки оценивания длительности символа «точка» и «тире», соответственно.
jfs v c t z T ) Y dt , 0 ∫ 0 ⎝∂ τ ⎠
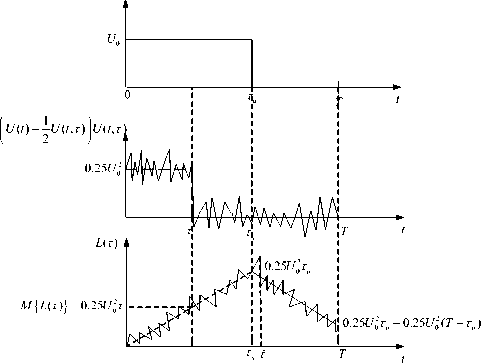
Рис. 6. Процесс оптимального оценивания длительности сигнала
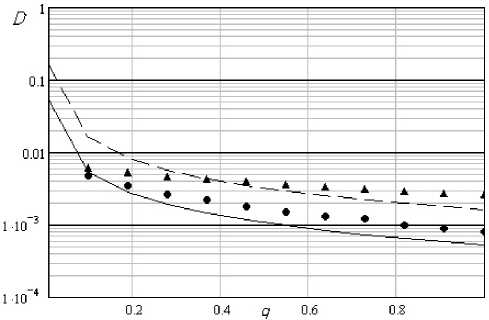
Рис. 7. Дисперсия ошибки оценивания длительности импульса
где U(t, T ) = U 0 V(t, T )cos ^ 0 t ; V ( t , т ) - функция, определяющая форму импульса. При заданной форме импульса полученные соотношения позволяют найти минимальную дисперсию ошибки оценивания и характеристики различе- -t 2
ния сигналов. Например, если V ( t ,т) = e т 2 , то dV/5т = 2 t 2 e т 2 /т 3 и количество информации по Фишеру
Найденные оптимальные алгоритмы различения импульсных сигналов определяют потенциальную помехоустойчивость приема сигналов с полностью известными параметрами, а также для случая, когда неточно известна длительность сигнала. В более реалистичном случае принимаемых сигналов является случайной начальная фаза Ф ( t ). Для нахождения оптимальных алгоритмов различения сигналов необходимо проинтегрировать апостериорные вероятности и с учетом равномерного распределения го ( ф ) = 1/2 п , - п < ф < п . Для гипотезы H 1 получим
I (т ) =
2 U 02 7 4 t 4 e
N 0 τ ∫ 0 τ 6
∞ где C = ∫ z 4 e -2z dz. 0
-2t 2
Таким
7 dt = 8UL C , N 0 τ
образом, относитель-
ная дисперсия ошибки оценивания длительности колоколообразного сигнала
σ ε2 τ 2
⎛ 8U 02 τ C⎞ -1 =1
⎜⎝N 0 ⎟⎠ 8CS ,
где S – отношение сигнал/шум.
Л1(,) = Px (U (t), 0 < t < T, Фм Po (U (t), 0 < t < T) =
τ 0
2 T °r E
= exp ^Tj U(t)U0 c°s(®ot + Ф)dt - 7Г ,
V N 0 0 N o J
где E 1 = U 0 2 τ 0 4 – энергия сигнала «точка». После интегрирования получим отношение правдоподобия в виде
n - Ei Л 2z л1 = J to(Ф)Л1 (Ф)dФ = e N0 I0 —
-π ⎝N 0 ⎠
где
Z
=
-JZ
2
+
Z
22
;
Z
1
=
U
0
J
U
(
t
) cos
τ 0
Z2 = U0 JU(t)sin ^0tdt; I0 (•) — модифициро- ванная функция Бесселя нулевого порядка. Точно так же усредненное по фазе отношение правдоподобия
3E 1
Λ 2
( ^1
⎜⎝N 0 ⎟⎠
3 τ 0
где Y = 7 V.' + Y 22 ; YY = U 0 J U ( t ) cos ^ 0 tdt;
3τ 0
Y 2 = U 0 J U ( t )sin a 0 tdt .
Оптимальное правило различения сигналов со случайной фазой можно сформулировать следующим образом. Для принятия решения необходимо сравнить между собой 3 числа «1» , Λ 1 и Λ 2 и выбрать большее из них. Если большим числом окажется единица, то принимается гипотеза H 0 ; если Λ 1 , то H 1 ; а если же Λ 2 , то H 2 . После логарифмирования отношения правдоподобия правило сводится к сравнению нуля и следующих величин
λ 1 =ln Λ 1 =ln I 0
⎛ 2Z ⎞E 1
-
⎜⎝N 0 ⎟⎠N 0
λ 2 =ln Λ 2 =ln I 0
⎛ 2Y ⎞3E 1
-
⎜⎝N 0 ⎟⎠N 0
Техническая реализация правила различения может быть осуществлена как с помощью корреляторов, так и с помощью согласованных фильтров. В первом случае после нахождения корреляционных интегралов с квадратурными компонентами U ( t )cos rn 0 t и U ( t )sin ® 0 t входного сигнала вычисляются статистики Z и Y . После этого необходимо выполнить нелинейное преобразование вида In I0 ( • ) . Выполняя вычитание половины относительной энергии ожидаемого сигнала, получаем логарифмы отношений правдоподобия λ 1 и λ 2 , которые сравниваются между собой и со значением ноль в решающем устройстве.
Согласованные фильтры СФ1 и СФ2 соответствуют сигналам «точка» и «тире», а временное селектирование должно осуществляться в моменты, когда напряжение на выходах согласованных фильтров соответствует заднему фронту каждого из сигналов.
Вероятностные характеристики найденного оптимального алгоритма различения сигналов могут быть найдены по той же схеме, что и для когерентного приема. Наконец, точно так же может быть решена задача различения сигналов, если их длительности известны не точно. Тогда нужно найти максимум функции правдоподобия, усредненной с учетом равномерного распределения длительности сигнала.
Заключение
Рассмотрены оптимальные и квазиопти-мальные алгоритмы различения импульсных тональных сигналов кода Морзе при полностью известных параметрах сигналов, а также при неточно известной длительности сигналов и при наличии случайной фазы сигналов. Проигрыш вероятности правильного решения квазиоптимального алгоритма по отношению к оптимальному составляет порядка 40-50%.
Список литературы Оптимальные и квазиоптимальные алгоритмы различения импульсных сигналов
- Радиотехнические системы. Под ред. Ю.М. Казаринова. М.: Высшая школа, 1990. 496с.
- Васильев К.К. Методы обработки сигналов. Ульяновск: УлГТУ, 2001. -78 с.
- Кловский Д.Д. Передача дискретных сообщений по радиоканалам. М.: Радио и связь, 1982.-304с.
- Котельников В.А. Теория потенциальной помехоустойчивости. М.-Л.: Госэнергоиздат, 1956. -152 с.
- Леман Э. Проверка статистических гипотез/Пер. с англ, под ред. Ю.В. Прохорова. М.: Наука, 1964.-408с.
- Де Грот М. Оптимальные статистические решения/Пер. с англ, под ред. Ю.В. Линника. М.: Мир, 1974. -492 с.
- Левин Б.Р. Теоретические основы статистической радиотехники. Кн.З. М.: Сов. радио, 1976. -288 с.
