Оптимальный прием навигационных сигналов

Автор: Грицан Олег Борисович
Журнал: Космические аппараты и технологии.
Рубрика: Космонавтика
Статья в выпуске: 1 (1), 2012 года.
Бесплатный доступ
Рассматриваются недостатки существующих алгоритмов обработки навигационных сигналов. Представлены варианты решения описанных недостатков на основе Фурье и Вейвлет-преобразований. Также озвучены преимущества предложенных алгоритмов.
Навигационные сигналы, вейвлет-преобразования
Короткий адрес: https://sciup.org/14117260
IDR: 14117260 | УДК: 621.396.933
Optimal receiving of navigation signals
This article discusses the limitations of existing algorithms for navigation signals. Described disadvantages solutions are presented based Fourier and wavelet transforms. And also proposed algorithms benefits are voiced.
Текст научной статьи Оптимальный прием навигационных сигналов
На нынешний день существует проблема качества принимаемой навигационной информации. Одними из самых важных проблем при реализации приемников навигационных сигналов являются:
-
- большое время поиска сигнала;
-
- маленькая чувствительность принимаемого сигнала;
-
- погрешность принимаемого навигационного сигнала.
Все текущие программно-аппаратные алгоритмы основаны на поиске сигнала корреляционными функциями. Лишь ряд фирм использует помимо стандартных алгоритмов методы быстрого поиска. Для решения поставленных проблем (задач) дополнительно используется поиск с помощью быстрого преобразования Фурье. Формулы (1) и метод Фурье преобразования кратко описаны ниже.
2п i
Xk =ZN—1 XnwN, Wn = ^ , k = 0…N – 1, (1)
1 N -1 - kn x k = N ∑ n X N w N .
Покажем, как выполнить дискретное преобразование Фурье за O( N ( p 1 + … + pn )) действий при N = p 1 p 2 . . pn . В частности, при N = 2 n понадобится O( N log( N )) действий.
Дискретное преобразование Фурье преобразует набор чисел a 0 , …, an– 1 в набор чисел b 0 , …, bn –1 , такой, что bi = ∑ n j - = 1 0 aj ε ij , где ε n = 1 и £ k = 1 и £ k # 1 при 0 < k < n . Алгоритм быстрого преобразования Фурье применим к любым коммутативным ассоциативным кольцам с единицей. Чаще всего этот алгоритм применяют к полю комплексных чисел (с ε = e 2π i / n ) и к кольцам вычетов.
Основной шаг алгоритма состоит в сведении задачи для N чисел к задаче для p = N/q числам, где q - делитель N. Пусть мы уже умеем решать задачу для N/q чисел. Применим преобразование Фурье к наборам ai, aq+1, ., aq(p_1)+i для i = 0, 1, ., q - 1. Покажем теперь, как за O(Np) дей- ствий решить исходную задачу. Заметим, что bi = Z q=0 8i (X p=0 akq + j8kq ). Выражения в скобках нам уже известны – это i (mod p)-е число после преобразования Фурье j-й группы. Таким образом, для вычисления каждого bi нужно O(q) действий, а для вычисления всех bi – O(Nq) действий, что и требовалось получить [1].
Данный алгоритм производит поиск сигнала в спектральной области, а затем передает тот участок, где присутствует сигнал, в коррелятор, который в свою очередь ищет сигнал уже во временной области. Данное программное решение позволило значительно сократить время поиска сигнала, однако это затруднило программно-аппаратную реализацию и очень осложнило математический аппарат и алгоритм. Алгоритм быстрого поиска представлен на рис. 1.
Следует также отметить, что Фурье-преобразование обладает плохой частотнопространственной локализацией, а также сложными алгоритмами по последующей фильтрации полученных отчетов.
Применяемый сегодня алгоритм имеет недостаток, выражающийся в определённой избыточности вычислений [2], которую можно проиллюстрировать с использованием рис. 2. Объём предварительно накопленного массива
Оптимальный прием навигационных сигналов данных определяется длительностью интервала накопления и шагом поиска. Длительность шага поиска определяется видом дальномерного кода, а длительность интервала накопления – требуемыми характеристиками обнаружения. В то же время количество символов на периоде дальномерного кода фиксировано. Если длительность интервала накопления будет в два раза больше, чем длительность периода кода, возникнет определённая избыточность. На рис. 2 условно показан период накопления, содержащий два одинаковых 17 периода дальномерного кода (изображены в виде треугольников). При расчёте корреляционных интегралов для разных значений задержек опорный сигнал сдвигается и специфика описанного в предыдущем разделе алгоритма такова, что рассчитываются значения при всех возможных задержках в диапазоне [0, Т]. Так как период дальномерного кода в рассматриваемом случае в два раза меньше, опорный сигнал, сдвинутый на Т/2, совпадает с исходным. В результате одно и то же значение корреляционного интеграла рассчитывается два раза. На правой части рисунка изображён результат – рассчитанная функция содержит два одинаковых периода.
Как альтернатива Фурье-преобразованию, для устранения вышеобозначенных недостатков предлагается в качестве быстрого поиска использовать вейвлет-преобразования,
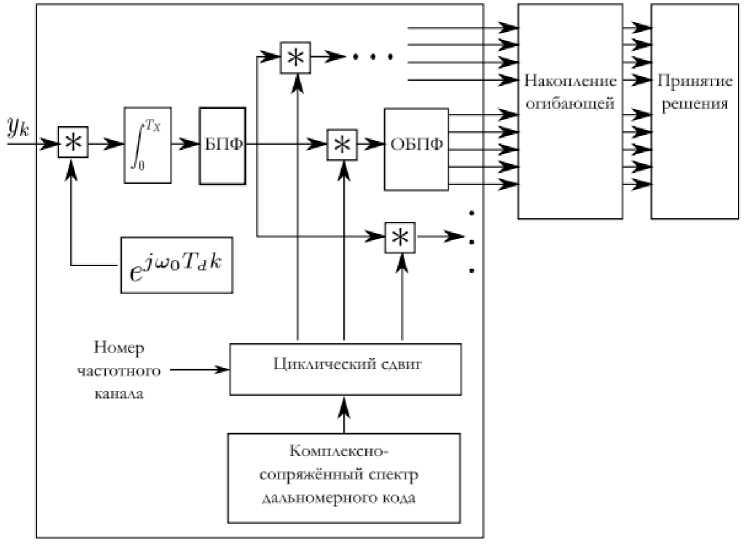
Рис. 1. Алгоритм быстрого поиска сигнала
■_■ ИССЛЕДОВАНИЯ
Havko-
Ограда
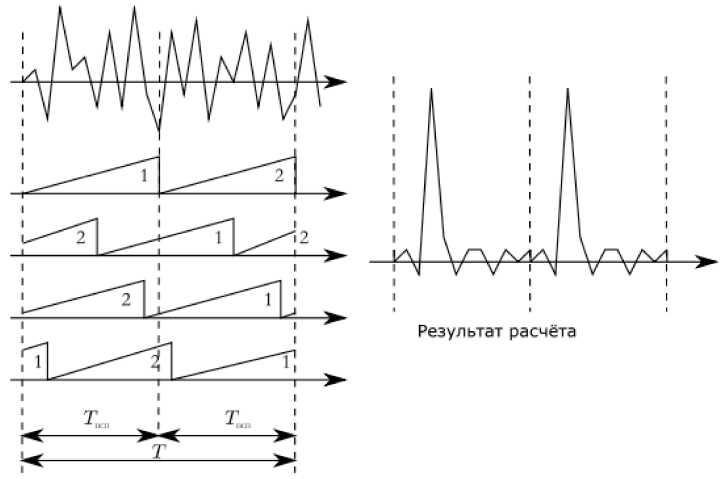
Рис. 2. Избыточность алгоритма быстрого поиска, основанного на быстрых преобразованиях Фурье
в частности лифтинг преобразования. Свойства вейвлет-функций – это разложить сигнал на ряд частотных фильтров, в основе которых лежит базисная функция (например, «Мексиканская шляпа», «прямоугольное окно» и т.д.). Формула (2) и метод вейвлет-преобразования применительно к мнимым и действительным сигналам кратко описаны ниже.
V mt ( t ) = a m/2 V ( a m t + k ) 5 ( t ) = ZL =-„ S mk V mt ( t ).
Напомним условия точного восстановления для двух пар биортогональных фильтров. Рассмотрим две пары фильтров: ( h, g ) и ( h , g ) . Мы хотим проводить разложение при помощи свертки с ( h , g ) , а восстановление -при помощи ( h , g ) (в ортогональном случае h = h , g = g ). В терминах z-преобразования разложение на высокие и низкие частоты с прореживанием вдвое имеет вид, описанный формулой (3):
X ( z ) ^[ ( H l ( z ч) X ( z ) + H l ( - z "') X ( - z ))/2,
( G ( z - l) X ( z ) + G ( - z - 1) X ( - z ))/2 ] . (3)
Записав в аналогичном виде процесс восстановления с помощью пары ( h, g ) и приравняв результат к Х ( z ), получаем выражения (4), описанные ниже:
H ( z ) H ( z - 1) + G ( z ) G ( z - 1) = 2,
H ( z ) H ( - z - 1) + G ( z ) ( G ( - z - 1) = 0. (4)
Метод лифтинга позволяет: 1) строить новые фильтры, удовлетворяющие выражениям (4), из уже имеющихся; 2) выполнять вейвлет-преобразование быстрее за счет декомпозиции на элементарные шаги лифтинга [3].
Следует отметить, что для поиска сигнала и оценки его наличия требуется не весь набор фильтров и отчетов (ФВВ, ФВН, ФНВ, ФНН), а только та часть, в которой обнаружен сигнал, для передачи его в коррелятор. Алгоритмически для внедрения в уже существующий алгоритм быстрого поиска, представленный на рис. 1, требуется заменить блок анализа сигнала, основанного на быстром преобразовании Фурье, на блок, в основе которого лежит вейвлет-анализ принимаемой информации.
Список литературы Оптимальный прием навигационных сигналов
- Быстрое преобразование Фурье [Электронный ресурс] // Википедия. Свободная энциклопедия: [сайт]. [2012]. URL: http://ru.wikipedia.org/wiki/Быстрое_преобразование_Фурье (дата обращения: 10.01.2012).
- Нуссбаумер Г. Быстрое преобразование Фурье и алгоритмы вычисления сверток: пер. с англ. М.: Радио и связь, 1985. 248 с.
- Воробьев В. И., Грибунин В. Г. Теория и практика вейвлет-преобразования. СПб.: ВУС, 1999. 204 с.
