Оптимизация движения космического аппарата с двигателем малой тяги в системе Земля-Луна

Автор: Старинова О.Л.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Управление и моделирование
Статья в выпуске: 3 т.8, 2006 года.
Бесплатный доступ
Описывается оптимизация законов управления и траекторий движения космического аппарата с двигателем малой тяги, выполняющего транспортные задачи в системе Земля - Луна. С исполь- зованием формализма принципа максимума Понтрягина получены необходимые условия опти- мальности управления с точки зрения быстродействия. Движение рассматривается в рамках плос- кой круговой ограниченной задачи трех тел. Получены решения для задач оптимального по быс- тродействию достижения устойчивых точек либрации системы и пролета Луны на требуемом уг- ловом расстоянии. Предложен подход к выбору начальных параметров краевых задач.
Короткий адрес: https://sciup.org/148197849
IDR: 148197849 | УДК: 629.78
Optimization of driving of a space vehicle with ion engine in a system Earth - Moon
The optimization of control lawes and trajectories of driving of a space vehicle with the low-thrust engine fulfilling transport problems in a system the Earth - Moon is featured. With use of a formalism of the Pontryagin maximum principle the necessary requirements of an optimality of control are obtained from the point of view of minimum duration. The driving is considered within the framework of a flat circular restricted problem of three body. The solutions for problems optimum on response of reaching of inconvertible points of a libration of a system and flyby of Moon on required angular distance are obtained. The approach to a choice of initial parameters of boundary value problems is offered.
Текст научной статьи Оптимизация движения космического аппарата с двигателем малой тяги в системе Земля-Луна
Самарский государственный аэрокосмический университет
Описывается оптимизация законов управления и траекторий движения космического аппарата с двигателем малой тяги, выполняющего транспортные задачи в системе “Земля - Луна”. С использованием формализма принципа максимума Понтрягина получены необходимые условия оптимальности управления с точки зрения быстродействия. Движение рассматривается в рамках плоской круговой ограниченной задачи трех тел. Получены решения для задач оптимального по быстродействию достижения устойчивых точек либрации системы и пролета Луны на требуемом угловом расстоянии. Предложен подход к выбору начальных параметров краевых задач.
Движение космических аппаратов (КА) в системе Земля–Луна традиционно рассчитывалось в рамках теории сфер действия. Это оправдано при использовании двигателей большой тяги в рамках импульсной постановки баллистических задач. Однако, при расчете движения в системе Земля-Луна КА с малой тягой, реактивное ускорение от двигательной системы сравнимо с возмущающими ускорениями Земли и Луны. В таких условиях некорректно полагать, что оптимальное управление не зависит от гравитационных воздействий второго притягивающего центра. В данной работе рассматривается проблема оптимального с точки зрения быстродействия управления и соответствующих ему траекторий движения в рамках плоской круговой ограниченной задачи трех тел.
Рассматривается движение КА с электро-реактивной двигательной установкой (ЭРДУ) под действием гравитационных сил притяжения Земли и Луны. Считается, что орбиты Земли и Луны относительно барицентра системы – круговые, возмущения от нецентральности гравитационного поля притяжения Земли и других небесных тел не учитываются. Возмущения, связанные с работой двигательной установки, например падение мощности при воздействии радиационных поясов Земли или ограничения на управление, связанные с особенностями углового движения КА в данной работе не учитываются.
Математическая модель движения и оптимальное по быстродействию управление Движение аппарата описывается в инерциальной полярной барицентрической системе координат (рис. 1). Основная плоскость совмещена со средней плоскостью движения Луны, полярная ось направлена в этой плоскости в сторону точки весеннего равноденствия, центр координат находится в центре тяжести системы Земля - Луна. Положение центра масс КА относительно барицентра определяется радиус-вектором r и полярным углом ϕ. Расстояние от КА до Земли и Луны соответственно задается векторами rЗ и rЛ . Вектор реактивного ускорения от тяги двигателей лежит в основной плоскости, его величина зависит только от массы КА. Направление ускорения задается углом управления л(t), который отсчитывается от радиус-вектора против часовой стрелки. Положение Земли и Луны определяется постоянными по величине радиус-векторами RЗ и RЛ и углом ϑ , имеющим постоянную скорость изменения щ равную средней угловой скорости движения Луны по орбите.
Все фазовые координаты системы приводятся к безразмерному виду. Для этого все линейные расстояния относятся к среднему
Рис. 1 . Инерциальная полярная барицентрическая система координат
d ( A y ) _ V y dt r
- to .
В этих обозначениях расстояния от КА до Земли и Луны равны соответственно:
r3 _ д/ r 2 + R ^ + 2 rRЗ cos ( A y ) ,
г л _ 4r 2 + R ^ - 2 rRл cos ( а У ) . (2)
В качестве критерия оптимальности будем использовать минимальную длительность выполнения целевой задачи:
расстоянию от Луны до барицентра RЛ , время к среднему периоду обращения Луны, ускорение к гравитационному ускорению на орбите Луны. В этом случае уравнения движения имеют вид:
T
T _ J dt ^ min
Введем вектор фазовых координат КА
X _ ( r, A y, Vr, V y , m ) T . Формально за-
dr _ v dy _ V^
dt r , dt " r ’
dV r dt
V2 r + R cos ( y - 9 ) Ц л ( r - R Л cos ( y - 5 ))
(1 - Цл )----------3---3------------+ a, r rЗ3 rЛ3
dV ϕ dt
VV y R 3 Sin ( y - 9 ) ц R sin ( y - 9 )
------+ (1 - Ц л ) --------3---3--------- + a.
r r З 3 r Л 3
a
r
a 0 δ
( 1 - m )
d m a 0 δ dt c ,
cos λ
a ϕ
a 0 δ
( 1 - m )
sin λ
Здесь Vr , V ϕ – компоненты безразмерного вектора скорости КА относительно барицентра; мЛ ? 0.0123 – отношение массы Луны к суммарной массе системы Земля-Луна; a 0 – номинальное безразмерное ускорение от тяги двигателей; с – безразмерная скорость истечения рабочего тела; д – функция вклю-
дача оптимизации описывается следующим образом: требуется определить вектор функций управления u ( t ) _ ( z ( t ) ,A ( t )) T из допустимого множества U , удовлетворяющий граничным условиям X ( 1 0 ) = X 0 , X ( T ) _ X K и доставляющий минимум критерию оптимальности T при фиксированном векторе проектных параметрах p _ { a 0 , c } T :
u opt ( t ) _ argminT ( й|р _ fixe,X о _ fixe,X к _ fixe ) U ( t ) .
В соответствии с формализмом принципа максимума Понтрягина введем вектор сопряженных переменных P _ ( P r , P y , P V , P Vv , Pm ) T
и Гамильтониан H _
< dX ) T
I dt )
• P
.
mРТ чения-выключения двигателей; m _ - m0
относительный расход рабочего тела.
Заменим в уравнениях (1) угол ц на угол Луна - барицентр - КА по формуле A y _ y - 9 . Дифференциальное уравнение, описывающее изменение этого угла, примет вид:
Из условия максимума Гамильтониана определим оптимальное направление вектора ускорения Xopt ( t ) и функции включения-выключения двигателей:
sinλopt
cosλopt
P
V ϕ
2 + P 2
V ϕ
P
r
2 2 ,
+ 1 V rϕ
где
5 =^
[ 0 ,
1 ,
А< 0
А> 0,
PV r
Л о — arctg--- □ _ р 2 , р 2 р р 0 Р , B — Р Р У г + РУф , Рт , Р д ф ,
V ϕ
/ „ 9 „ 9
Р А Ру + Ру А — _т + \----у_ c 1 — т
.
Система сопряженных уравнений для этой задачи имеет вид:
dP — Р dt V r
V- ф2 . 1 . Д л 3 ( 1 — Д л X r + R 3 cos А Ф )2 + Т + Т
r r З r Л
r З 5
—
—
3 д л ( г — R Л cos А ф ) 2 r Л 5
V ϕ + ϕ 2 +
( Рг — ± 1 - из условия нормировки), чтобы на концах оптимальной траектории выполнялись начальное и конечное условия X ( t 0 ) — X 0, X ( т ) — XT .
Пусть стартовая орбита круговая, радиусом r 0 , и положение КА относительно Луны в начальный момент А ф 0, в этом случае начальный вектор фазовых координат задается значениями
P
V ϕ
—
V r V + r 2
3 - 3 ( 1 — цЛ ) sin А ф ( г + R3 cos А ф )
5 rЗ
—
—
3 Д Л — Л sin А ф ( г — —Л cos А ф )
r Л 5
,
аР А ф dt
r
- PVr —(1 — Дл )
V
R3 sin А ф --3— + + rЗ
Г r. RT )
X 0 — 1-^ , А ф о , V r 0 — 0 , У ф о — -Л -1 .(8)
V - Л r Г 0 У
В зависимости от цели перелета конечные значения вектора фазовых координат задаются следующим образом:
1) для задачи достижения устойчивых точек либрации системы
3 ( 1 — д л ) rR. sin А ф ( r + R3 cos А ф )
+----------------5---------------+ rЗ
T
X t — | 1 , А ф к — ± -3- , Уд — 0 , У фк — 1 1 ;(9)
ц Л—Л sin А ф З ц л г— л sin А ф ( г — —Л cos А ф р ---------- — ------------------------
2) для пролета Луны на заданном угло-
+3 r Л 3
5 rЛ
–
У
вом расстоянии А фк с не фиксированным
+
P V ϕ
R3 cos А ф
г 3
V r
—
Д л - л cos А ф г 3 rЛ
3 — 3 rsin 2 А ф + 3дЛR Л Лrsin 2 А ф
5 rЗ
5 rЛ
X
вектором скорости VT — ( v r T, У ф Т ) т , с учетом условий трансверсальности для вектора скорости
X t — ( 1 , А фк, Р у — 0 , Р у ф — о)" . (10)
У
dP r dt
—
Р + Ру r Vϕ
V ϕ
, r
dP m
Так как —^7 ^ 0 , при всех t е [ t 0 , Т ] , и
аРУф = РфУ — 2 Рууф — Р Аф dt r dPm a0δ 2 2
at (1 - m ) 2 PV + Р' ф .
Таким образом, задача об оптимальном по быстродействию плоском движении в системе “Земля-Луна” сводится к следующей двухточечной четырехпараметрической краевой задаче. Требуется найти такие начальные значения
для задачи на оптимальное быстродействие расход рабочего тела в конечный момент времени не фиксирован, то, согласно условиям трансверсальности, Рт ( Т ) — 0 . При t е [ 0 , Т ) Рт ( t ) > 0 , поэтому для задачи на оптимальное быстродействие функция включения-выключения двигателей, согласно (6) 5 ( t ) = 1, то есть двигатель работает без выключений. Кроме того, в силу монотонного убывания функции Рт ( t ) удобно использовать эту со-
пряженную переменную для выхода из ин-
тегрирования. Остальные сопряженные переменные и фазовые координаты могут изменяться немонотонно, а длительность перелета неизвестна.
Численные методы, применяемые при решении
Моделирование оптимального движения КА сводится к решению задачи Коши для системы дифференциальных уравнений движения и сопряженных множителей (1-2), (7) и оптимального управления (5-6). Для ее решения численного решения использовался метод Рунге-Кутты 4 порядка с постоянным шагом.
Введение расширенного вектора фазовых координат системы z = (r, A,, Vr, V,, m, Pr, P,,, Pv , P P_ )T r ϕm позволяет привести решение двухточечной краевой задачи к решению системы нелинейных уравнений:
f (z (t 0 ))= 0, (11) где f (z(t0)) - векторная функция невязок в конечный момент времени зависящая от начальных значений фазовых координат и сопряженных множителей в начальный момент времени z(t0). Для задачи достижения устойчивых точек либрации f (z(t0 ))=(r(T)-1, A,(T)-A,^, Vr (T), V, (T)- 1)T,
(12) а для пролета Луны на заданном расстоянии f ( z ( t 0 )) =( r ( T ) — 1 , A , ( T ) — , Pvr ( T ) , P v , ( T )Y
Если определено начальное значение вектора z ( t 0 ) , удовлетворяющее условиям (1 1 или 12) с заданной погрешностью при дифференциальных уравнениях (1-6), то требуемая задача оптимизации решена.
Функция невязок системы (11) очень чувствительна к начальным значениям подбираемых параметров z и имеют многоэкстремальный, “овражистый” характер.
Для решения системы нелинейных уравнений (11) был использован модифицированный метод Ньютона с автоматической оцен- кой сходимости и изменением шага вычисления производных и ограничений на приращения. Для получения решений с различными значениями проектных параметров КА и граничными условиями перелетов использован метод продолжения по параметру, суть которого изложена ниже.
Пусть известно решение задачи оптимизации для некоторого фиксированного вектора проектно-баллистических параметров перелета b0 , т.е. известно значение расширенного вектора фазовых координат z(t0) доставляющего минимум критерию оптимальности T(b0). Требуется найти решение задачи в той же постановке, но для других параметров перелета b* . Если постановка задачи корректна, то при небольшом отличии b0 от b* решение задачи оптимизации (4) и критерий оптимальности (3) будут отличаться незначительно.
Разобьем отрезок от b 0 до b* на k частей и построим последовательность
Г" т-. b - bo bi = b о + —:— k
,
такую что при i = 0 ,
bi = b0 , а при i = k, bi = b*. Так как задача оптимизации при b0 решена, то известно начальное значение вектора z0 . Если считать, что при незначительном изменении вектора проектно-баллистических параметров значения вектора z изменяются линейно, то получим z (bi+1 )= z (bi)+ Ai(bi+1 - bi), где A =(z(bi.)-z(b-1 ^-bi-b-1 )1. (14)
Наиболее просто формула (13) выглядит в случае, когда в векторе bi изменяется только одна переменная.
В работе [2] методика продолжения по параметру продемонстрировала высокую эффективность для решения задачи об опти- мальном по быстродействию движении КА в системе “Земля-Луна” в случае использования усредненных уравнений движения. В данной работе использование этого метода позволило получить решение поставленной задачи для различных значений проектнобаллистических параметров и граничных условий перелета.
Достижение точек либрации системы “Земля-Луна”
Рассматривается задача достижения точки либрации системы Земля-Луна L4 (КА движется по круговой орбите радиусом равным среднему радиусу орбиты Луны, опережая ее на 60є). Проектные параметры аппарата выбраны близкими к параметрам исследовательского КА Европейского космического агентства SMART-1: m0 = 400 кг, P = 0,5 Н, с = 15 км/с.
Маневры набора скорости и увеличения большой полуоси орбиты аппаратами с двигателями малой тяги на низких околоземных орбитах хорошо изучены, в том числе с учетом возмущений от гравитации Луны и других небесных тел; нецентральности гравитационного поля и атмосферы Земли. С точки зрения влияния тяготения Луны на оптимальные законы управления и траектории движения интерес представляет поведение аппарата на высоких орбитах, поэтому в качестве стартовой рассматривается круговая орбита с большой полуосью a0 = 100000 км.
Дифференциальные уравнения, описывающие поведение системы (1-7) позволяют осуществить непрерывное изменение параметра второго гравитирующего тела от нуля до требуемого значения. Это дает возможность использовать в качестве начальных приближений для подбираемых значений сопряженных множителей результаты решения задачи об оптимальном по быстродействию перелете между круговыми, компланарными орбитами при не фиксированной угловой дальности перелета в конечный момент времени. В этом случае, согласно условию трансверсальности РДф (Т) = 0. Если в уравнениях (1-7) положить и Л = 0 (гравита- цию Луны не учитывать), то в любой момент времени РДф (t) = 0 и порядок краевой задачи снижается до трех. Решение этой задачи и приближенные формулы для начальных значений сопряженных множителей были получены в работе [1].
Используя метод перемещения по гравитационному параметру второго притягивающего тела от 0 до µЛ , определяется измененный вектор z ( t 0 ) и соответствующее управление и траектория движения с учетом гравитации Луны с некоторой нефиксированной конечной угловой дальностью КА-Луна Д ф * ( Т ) = 60е. Затем условие трансверсальности в конечный момент времени Р Д ф ( Т ) = 0 заменяется на условие достижения требуемой угловой дальности КА-Луна Д ф ( Т ) = Д фк . Теперь, осуществляя процедуру перемещения по переменной Д ф ( Т ) от Д ф * к Д фк =60е можно получить измененный вектор z ( t 0 ) , оптимальные управление и траекторию при требуемых граничных условиях.
Использование такой методики позволяет не испытывать существенных трудностей в выборе начальных значений сопряженных множителей для решения краевой задачи и получить решения для различных граничных условий и проектных параметров КА.
На рис. 2а показана траектория, использующаяся в качестве начального приближения (достижение орбиты Луны с нефиксированной угловой дальностью Земля-Луна без учета гравитации Луны). На рис. 2б изображена итоговая оптимальная траектория достижения точки либрации L4, с учетом гравитации Луны и с фиксированной угловой дальностью в конечный момент времени Д ф ( Т ) = 60 ° .
На рис. 3-5 показаны зависимости компонент скорости КА и сопряженного множителя Р Д ф на оптимальной траектории от угловой дальности перелета. Для сравнения приведены аналогичные зависимости для задачи пролета орбиты
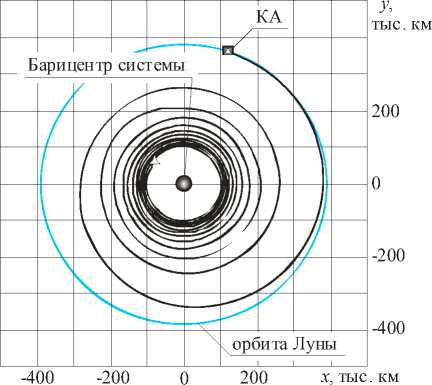
Рис. 2.
а – траектории достижения орбиты Луны без учета гравитации;
б – оптимальное по быстродействию достижение точки либрации L4 системы “Земля-Луна”
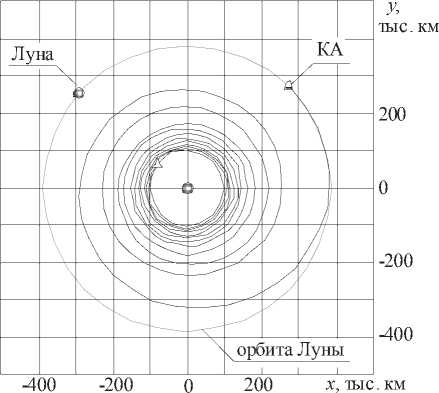
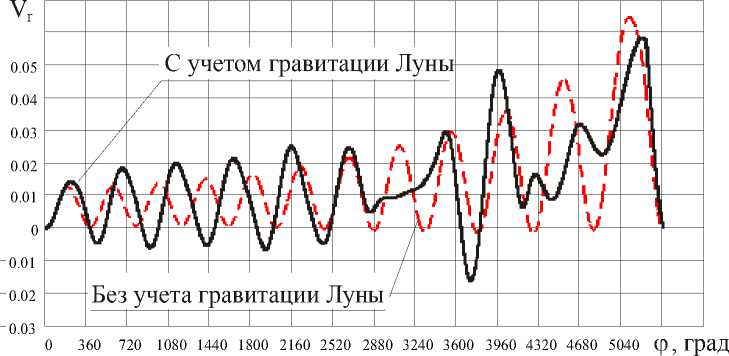
Рис. 3. Зависимость безразмерной радиальной составляющей скорости Vr от угловой дальности перелета для задачи достижения точки либрации L4
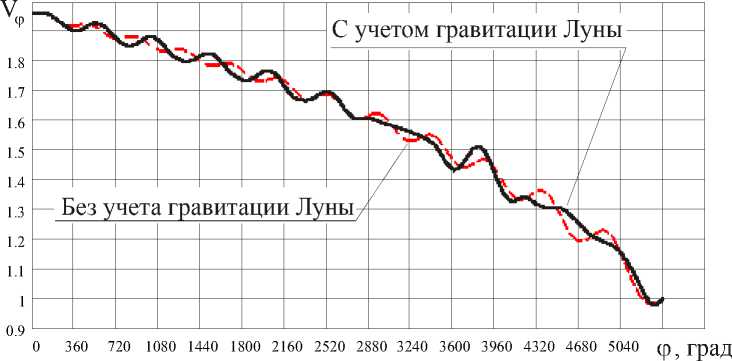
Рис. 4. Зависимость безразмерной составляющей скорости V ϕ от угловой дальности перелета
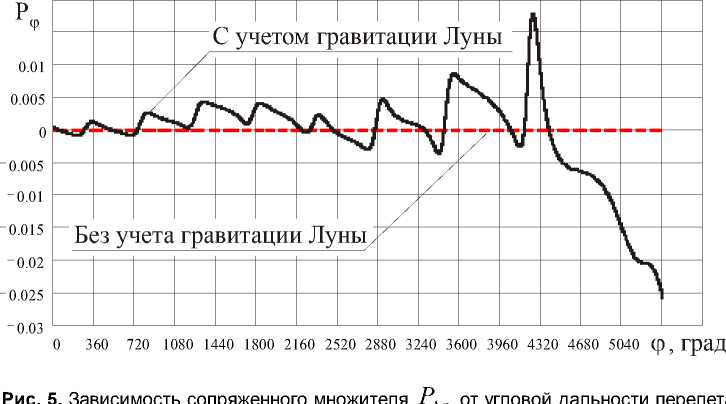
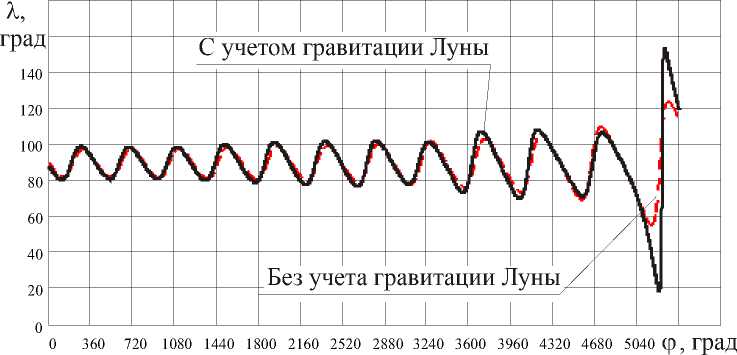
Рис. 6. Оптимальная программа управления, соответствующая достижению точки либрации L4 системы “Земля-Луна”
Луны без учета гравитации Луны использованные в качестве начального приближения (штриховые линии). На рис. 6 показана оптимальная программа управления, соответствующая достижению точки либрации L4.
Наибольшее влияние на оптимальное управление и изменение фазовых координат Луна оказывает на последних витках орбиты в моменты своего максимального сближения с КА. Особенно заметно это влияние на компоненты вектора скорости (рис. 3-4) и сопряженный множитель Р д ф . Однако в целом длительность и угловая дальность перелета, оптимальное управление и траектории движения оказались близки к решению, использованному в качестве начального приближения.
Задача пролета Луны на заданном угловом расстоянии
Рассматривается задача пролета Луны при фиксированном угловом расстоянии КАЛуна в конечный момент времени. Начальные значения проектных параметров (кроме тяги двигателей) и стартовой орбиты выбраны такими же, как для задачи достижения точек либрации. Номинальная тяга двигательной установки увеличена до P = 1 Н.
В качестве начального приближения для решения задачи использовано решение задачи о достижении круговой орбиты с радиусом равным среднему радиусу орбиты Луны, описанное в работе [1]. Использование методики перемещения по параметру позволяет получить решения задачи оптимизации для различных граничных условий и проектных параметров КА.
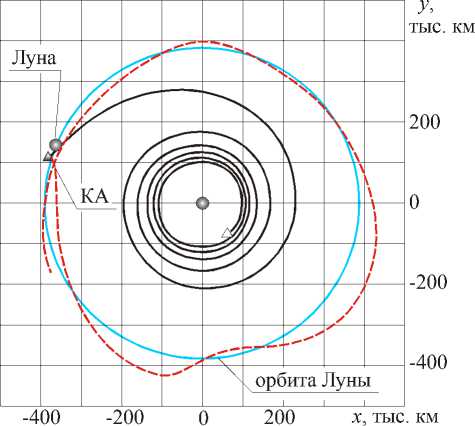
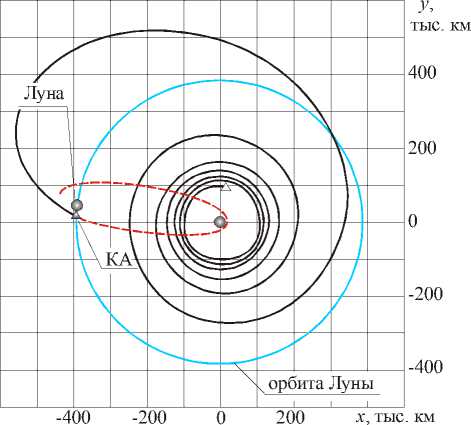
Рис. 7. Оптимальные по быстродействию траектории пролета Луны, Аф К 5 : а) монотонное изменение радиуса орбиты (T = 39,31 сут, А ф 0 = - 43 ° );
-
б) текущий радиус орбиты превышает радиус орбиты Луны (T = 68,13 сут, А ф 0 = 87 ° )
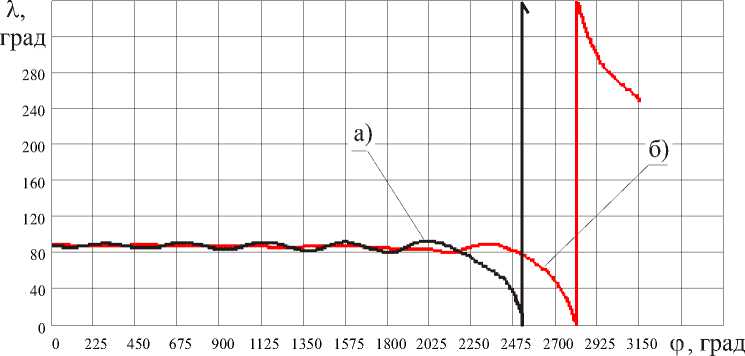
Рис. 8. Оптимальная программа управления, соответствующая задаче пролета Луны А ф К = 5 ° а) монотонное изменение радиуса орбиты (T = 39.31 сут, А ф 0 = - 43 ° );
-
б) текущий радиус орбиты превышает радиус орбиты Луны (T = 68.13 сут, А ф 0 = 87 ° )
Показано, что гравитация Луны оказывает существенное влияние на оптимальный закон управления и соответствующую траекторию движения. Например, на рис. 7 изображены оптимальные траектории для пролета Луны на угловом расстоянии от нее 5є при старте с круговой орбиты с a 0 =100000 км. Сплошной линией показано движение с включенным двигателем и оптимальным законом направления тяги. Пунктиром - траектории пассивного движения КА после завершения целевой задачи и отключения двигателей.
Задача оптимизации имеет многоэкстремальный характер. Во-первых, существуют различные классы решений, показанные на рис. 7а и 7б: траектории с монотонным изменением радиуса орбиты КА и траектории с увеличением радиуса траектории существенно больше радиуса орбиты Луны. Кроме того, в пределах одного класса возможны траектории, угловая дальность которых отличается на целое количество витков. Естественно, значение критерия оптимальности полученное для всех этих траекторий различно.
На траекториях с монотонным изменением радиуса орбиты (рис. 7а), КА после выключения двигателей оказывается захваченным гравитационным полем Луны и выходит на замкнутую селеноцентрическую траекторию. Эти траектории могут использоваться для формирования орбиты вокруг Луны с заданными параметрами. Траектории с немонотонным изменением радиуса орбиты (рис. 7б) характеризуются большой относительной скоростью КА – Луна в момент отключения двигателей и могут быть использованы для формирования траектории возвращения к Земле.
На рис. 8. показана программа оптимального управления для монотонных и немонотонных оптимальных траекторий.
Таким образом, предложенная методика показала свою эффективность для оптимизации сложных многовитковых траекторий движения КА с двигателями малой тяги в поле притяжения двух тел. Полученные оптимальные законы управления и соответствующие ему траектории движения могут быть использованы для решения задач формирования заданных селеноцентрических орбит.
Список литературы Оптимизация движения космического аппарата с двигателем малой тяги в системе Земля-Луна
- Старинова О.Л. Оптимальное по быстродействию движение между круговыми компланарными орбитами//Известия Самарского научного центра РАН. 2005. Т. 7. №1.
- M.S. Konstantinov, G.G. Fedotov, V.G. Petukhov, et al. Electric Propulsion Mission to GEO Using Soyuz/Fregat Launch Vehicle. 52 nd International Astronautical Congress. IAF-01-V.3.02, Toulouse, France, October 1-5, 2001.
