Оптимизация функции управляющего воздействия для электропривода с синхронной реактивной машиной с независимым управлением по каналу возбуждения

Автор: Виноградов Константин Михайлович, Белоусов Евгений Викторович, Сычев Дмитрий Александрович, Наумович Никита Игоревич, Хаятов Евгений Сергеевич, Грызлов Артем Ашотович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электроэнергетика
Статья в выпуске: 2 т.16, 2016 года.
Бесплатный доступ
Рассматриваются вопросы оптимизации функции управляющего воздействия для электропривода с синхронной реактивной машиной с независимым управлением по каналу возбуждения (СРМНВ). Сформулирована задача оптимизации формы пространственной магнитодвижущей силы статора для разных вариантов источников питания обмоток с учетом принятых ограничений, записаны уравнения связи. Рассмотрены схема питания с индивидуальными источниками тока на каждой фазе и схема с двумя автономными инверторами, работающими параллельно. Проведено сравнение СРМНВ с традиционным реактивным двигателем, рассмотрен случай, когда последний питается от источника синусоидального напряжения. При питании синхронной реактивной машины синусоидальным напряжением величина q получается ниже по сравнению с исходным случаем. Рассмотренные в статье оптимальные соотношения, как показал приближенный аналитический анализ, способны дать первичную оценку принимаемым решениям, что существенно сокращает временные затраты.
Синхронная реактивная машина с независимым управлением по каналу возбуждения, оптимизация формы мдс
Короткий адрес: https://sciup.org/147158348
IDR: 147158348 | УДК: 62-83:621.313.3 | DOI: 10.14529/power160204
Optimization of control action function for electric drive with field regulated reluctance machine
The article considers the issues of control action optimization for electric drive with field regulated reluctance machine (FRRM). It defines the aim of optimization of stator’s space magnetomotive force form for various power supplies of windings with due regard to the accepted limits. The paper also provides the coupling equations. The optimum ratio considered can provide an initial evaluation of taken decisions, which significantly reduces time expenditures.
Текст научной статьи Оптимизация функции управляющего воздействия для электропривода с синхронной реактивной машиной с независимым управлением по каналу возбуждения
Пространственное распределение магнитодвижущей силы (МДС) двигателя в электроприводах (ЭП) переменного тока, в случае неучета высших гармоник, при определенной фазной обмотке совпадает по форме с управляющим сигналом во времени. Это позволяет иначе сформулировать задачу и оптимизировать форму пространственной МДС статора, т. е. линейную плотность поверхно- стного тока.
В качестве критериев оптимизации необходимо выбрать параметры, которые обеспечат высокие массогабаритные показатели ЭП, например, электромагнитного момента двигателя к значению потерь в обмотке статора. Известно, что электромагнитный момент определяет габарит электриче- ского двигателя.
Не обращаясь к частному, МДС, которую создает обмотка статора, можно определить:
Здесь C - постоянная, определяемая в случае симметричной формы МДС в зазоре как у (т) = у(—т); т - полюсное деление; x(t) - линейная плотность тока поверхностного тока [1, 13].
Касательное усилие, которое действует на ротор в точке t,
z(t) = x^) •y(t). (2)
Для того чтобы учесть явнополюсную конструкцию ротора (например, синхронный реактивный двигатель с независимым управлением по каналу возбуждения), определим функцию [2]:
(tx = (z(t), где z(t) > 0
Величина окружной силы, которая создает электромагнитный момент двигателя, пропорциональна площади под кривыми a — b — с, d — е — f (рис. 1):
S = £ u(t)dt. (4)
Статор

Ротор
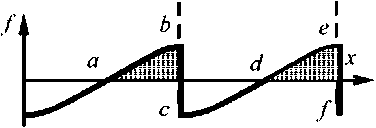
Рис. 1. График удельной касательной силы в электрической машине
При этом из практики проектирования одного из узлов электропривода – электромеханического преобразователя – известно [3], что габарит элек- тродвигателя определяется электромагнитным моментом, который, в свою очередь, обусловлен раз- виваемой двигателем окружной силой. Исходя из этого, в качестве критерия оптимизации целесооб- разно выбрать показатель [4]: 5
-
q "T+т TTL .
x z dt
J —т
Величина q может быть рассчитана через от-
ношение значения электромагнитного момента двигателя к значению потерь в обмотке статора при единичных осевой длине ротора, окружности расточки статора, активном сопротивлении обмотки статора. Числитель и знаменатель величины q в одинаковой степени (во второй) зависят от тока статора, т. е. данная величина – величина нулевой размерности относительно значения тока.
В качестве целевой функции будет выступать линейная плотность поверхностного тока х = x(t), где t - координата, которая отсчитывается вдоль расточки статора.
Техническое задание на проектирование, стандарты и другие директивные документы, геометрические, физические и технико-экономические особенности проектирования привода накладывают определенные ограничения на изменение параметров объекта оптимизации.
Максимальное значение индукции в зазоре и допустимая по нагреву величина тока являются наиболее значимыми ограничениями в электрическом двигателе [5].
Для рассматриваемого случая примем следующие ограничения:
-
– насыщение магнитной системы:
-
У < У тах ; (6)
– ограничение по нагреву:
2т S -Т x 2 (t)dt < Х тах . (7)
Уравнения связи, которые характеризуют свойства объекта оптимизации, могут быть представлены нагрузочными и скоростными диаграммами, учитывающими приложенные возмущения [6]:
S-T x(t)dt = 0;
z(t), где z(t) > 0
u(t) = |
Вопросы оптимизации линейной плотности поверхностного тока были рассмотрены для различных случаев питания обмоток статора: индивидуальные источники питания на каждой фазе; два автономных инвертора, которые работают параллельно; схема при проводимости вентилей 120 ° . При этом предельное значение МДС было ограничено для того, чтобы учесть насыщение магнитной системы машины.
В качестве исходного графика линейной нагрузки была принята прямоугольная форма токов с возможностью регулирования каждого пазового тока независимо от других, при этом магнитная цепь электродвигателя считалась линейной. При относительной величине полюсной дуги b = 0,5 оптимум был найден в случае равных величин токов в пазах.
Для того чтобы учесть насыщение, кривая намагничивания 1 была аппроксимирована ломаной 3 (рис. 2), при этом коэффициент к = В2/В1 (где Вг -индукция в зазоре в идеальной магнитной системе, В2 - максимальная реальная индукция в зазоре) учитывал степень насыщения электрической машины.
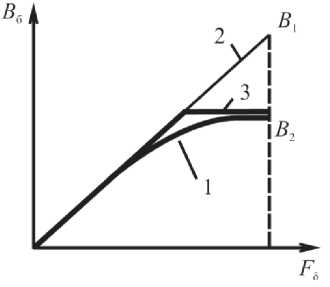
Рис. 2. Реальная (1), идеальная (2) и расчетная (3) кривые намагничивания электрической машины
В данном случае оптимальное значение полюсной дуги увеличилось, а в качестве оптимальной формы линейной нагрузки осталась горизонтальная прямая (рис. 3). При к = 0,5 величина q снизилась на 42 %, полюсная дуга изменилась до b = 0,63.
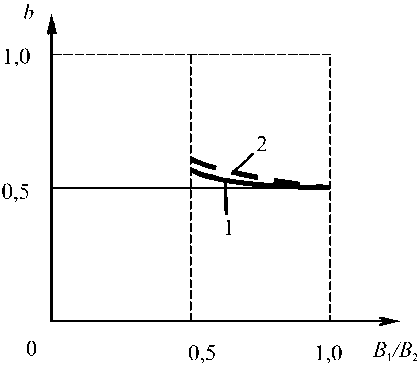
Рис. 3. Зависимость полюсной дуги b от степени насыщения магнитной системы: 1 – при независимом питании обмоток; 2 – при питании обмоток от двух трехфазных инверторов напряжения
При питании электропривода по схеме, когда обмотки фаз статора собраны в две звезды, которые сдвинуты на 30 электрических градусов в пространстве, и подключены к двум автономным инверторам, работающим параллельно, наибольшая величина q была зафиксирована при проводимости вентилей 180 градусов, но это значение на 11 % меньше, чем в исходной схеме. Показатель b равен 0,5. Полуволна тока одной фазы статора СРМНВ, которая может быть принята оптимальной, состоит из нескольких горизонтальных отрезков, продолжительность которых равна 60 градусам (рис. 4). Средний отрезок по амплитуде в два раза больше, чем крайние. Данный показатель снижается, если учитывать насыщение магнитной системы электрического двигателя. Так при к = 0,5 показатель q уменьшается на 50 %, а b
Электроэнергетика
принимает значение 0,67. Если переходить на проводимость вентилей 120 градусов, то неэффективность использования двигателя увеличится на 19 % [7–9, 12].
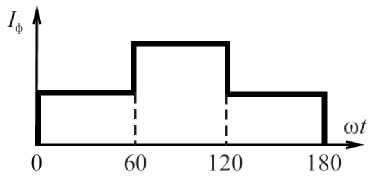
Рис. 4. Форма полуволны тока фазы статора СРМНВ при питании от трёхфазного инвертора напряжения
Проведено сравнение СРМНВ с традиционной реактивной машиной (питание осуществляется синусоидальным напряжением) [10]. Линейную плотность поверхностного тока можно описать уравнением
А(х) = Ат sin ( П х), (9)
а МДС
Г(х) = J A(x)dx + С =
=-Ат cos ( П х) • П . (10)
Выражение /. = А(х) • В 6 (х) позволило определить удельное касательное усилие. Для длины полюсной дуги а6 = 0,5 определили электромагнитный момент:
М = ^6 J^2 А(х) • Вб(х) • dx =
= ^6 Г^ т sin ( П х) • П А т cos ( П х) • т ; • dx =
■■ П (-£cos(2 П 2 = к^ , 5 (11)
где к = 71 бТ ; .
2 ^ 6
Критерий оптимизации определялся выраже- нием q =
= к -т5 . 2л 2
м ^ Г 5
Для электропривода с СРМНВ этот показа- тель равен [11]
q = кт 2 - .
4 4
Итак, в случае питания синхронной реактив- ной машины синусоидальным напряжением величина q снижена на 23 % по сравнению с исходным случаем. А если учесть, что синхронные реактивные двигатели традиционно работают в схемах
Величина критерия оптимизации в зависимости от способа питания силовых цепей
Рассмотренные аналитические методы вполне способны дать первичную оценку решениям при выборе источника питания силовых цепей электромеханического преобразователя, что существенно сокращает временные затраты на этапе выбора электрооборудования. При этом не отвергается возможность сочетания упрощенных методов и вариантов расчета по детализированным схемам.
Список литературы Оптимизация функции управляющего воздействия для электропривода с синхронной реактивной машиной с независимым управлением по каналу возбуждения
- Григорьев, М.А. Линейная плотность поверхностного тока в энергосберегающих электроприводах с синхронной реактивной машиной независимого возбуждения/М.А. Григорьев, А.Е. Бычков//Вестник ЮУрГУ. Серия «Энергетика». -2010. -Вып. 14, № 32 (208). -C. 46-51.
- Law, D. Design and Performance of Field Regulated Reluctance Machine/D Law, A. Chertok, T. Lipo//IEEE Transactions on Industry Applications. -1998. -Vol. 30, no. 5. -P. 1185-1192 DOI: 10.1109/28.315228
- Беспалов, В.Я. Электрические машины: учеб. пособие для студентов высш. учеб. заведений/В.Я. Беспалов, Н.Ф. Котеленец. -М.: Издат. центр «Академия», 2006. -320 с.
- Design Criteria of Performance Synchronous Reluctance Motors/A. Vagati, G. Franceschini, I. Marongiu, G.P. Troglia//IEEE-IAS Annual Meeting Houston (USA), October 1992 DOI: 10.1109/IAS.1992.244463
- Проектирование электрических машин: учеб. для вузов./И.П. Копылов, Б.К. Клоков, В.П. Морозкин, Б.Ф. Токарев; под ред. И.П. Копылова. -4-е изд., перераб. и доп. -Изд-во «Юрайт», 2011. -767 с.
- Анучин, А.С. Система управления с прогнозированием для реализации контура тока предельного быстродействия/А.С. Анучин//Труды МЭИ. Электропривод и системы управления. -М.: Издат. дом МЭИ, 2010. -Вып. 686. -С. 69-76.
- Weh, H. On the Development of Inverter Field Reluctance Machines for High Power Densities and High Output/H. Weh//ETZ Archiv. -1984. -Bd. 6. -P. 135-144.
- Усынин, Ю.С. Силовые цепи вентильных электроприводов с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов//Электротехнические системы и комплексы: межвуз. сб. науч. тр. -Магнитогорск: МГТУ, 2004. -Вып. 8. -С. 13-17.
- Toliyat, H. A Five-Phase Reluctance Motor with High Specific Torque/H. Toliyat, L. Xu, T.A. Lipo//IEEE Transactions on Industry Applications. -1992. -Vol. 28, no. 3. -P. 559-667 DOI: 10.1109/28.137454
- Вейнгер, А.М. Регулируемый синхронный электропривод/А.М. Вейнгер. -М.: Энергоатомиздат, 1985. -224 с.
- Usinin, U.S. Weight and Dimensional Parameters of a Power Drive for Electrical Vehicle/U.S. Usinin, M.A. Grigoriev, K.M. Vinogradov//Powertrains, Fuels and Lubricants Meeting, SFL 2009; Florence; Italy; 15 June 2009 through 15 June 2009; Code 90682.
- Lipo, T. Advanced Motor Technologies: Converter Fed Machines/T. Lipo//Transactions on Energy Conversion. -1998. -P. 204-222 DOI: 10.1007/978-3-642-60832-2_17
- Moghaddam, R.R. Synchronous Reluctance Machine Design/R.R. Moghaddam. -Stockholm, 2007. -90 p.
- Анализ влияния способа управления на удельные показатели в синхронных реактивных электроприводах/Д.А. Сычев, А.М. Журавлев, Е.В. Белоусов и др.//Актуальные вопросы современной науки: сб. науч. тр. -Новосибирск: ЦРНС, 2014. -Вып. 34. -С. 199-208.
