Оптимизация гелиоцентрических перелётов космического аппарата с разнотипными электроракетными двигателями

Автор: Старинова Ольга Леонардовна, Лобыкин Андрей Александрович, Рожков Мирослав Андреевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 1 (40), 2023 года.
Бесплатный доступ
В статье рассматривается вопрос о формировании оптимальной номинальной программы управления маршевой тягой двигательной установки (ДУ) межпланетного космического аппарата (КА), состоящей из нескольких разнотипных электр оракетных двигателей (ЭРД). Критерием оптимизации является минимум расхода рабочего тела при фиксированной длительности перелёта. Определяются: направление тяги ДУ и последовательность включения/выключения отдельных двигателей. На основе принципа максимума Понтрягина получены аналитические выражения для оптимальных программ номинального управления: определены зависимости направления тяги и функции включения/выключения отдельных двигателей от фазовых и сопряжённых координат динамической системы. В качестве примера использования разработанной методики оптимизации рассматривался гелиоцентрический участок перелёта Земля - Марс. Расчёты проводились для прототипа с параметрами, сходными с КА международного проекта «Демокритос», предполагающего использование российской ядерной энергоустановки для обеспечения электроэнергией множества разнотипных ЭРД. Проведено численное решение краевых задач и моделирование движения КА с полученной оптимальной номинальной программой управления для ДУ с двумя типами ЭРД и различной длительностью перелёта. Выполнен анализ зависимости расхода рабочего тела и моторного времени для обоих типов двигателей от требуемой длительности перелёта.
Ядерная энергодвигательная установка, электроракетный двигатель, оптимальное управление, минимальный расход рабочего тела
Короткий адрес: https://sciup.org/143179914
IDR: 143179914 | УДК: 629.7.076.6
Optimizing heliocentric transfers of a spacecraft equipped with electric thrusters of different types
The paper addresses the issue of generating the optimal nominal program for controlling the thrust of a cruise propulsion unit (PU) of an interplanetary spacecraft (SC), consisting of several different types of electric thrusters. The optimization criterion consists in minimizing propellant consumption at fixed transfer duration. Determined are: PU thrust direction and the sequence of firing/shutting down individual thrusters. Pontryagin's maximum principle was used to obtain analytical expressions for optimal nominal control programs: determined were dependences of thrust direction and firings/shutdowns of individual thrusters on the dynamic system phase and conjugate coordinates. Used as an example of an application for the optimization procedure was the heliocentric section of the Earth - Mars transfer trajectory. Calculations were performed for a prototype with parameters similar to the SC of the international project DEMOCRITOS, which intends to use a Russian nuclear power system to supply power to multiple electric thrusters of different types. Numerical computations were run to solve boundary problems and simulate SC motion with the obtained optimal nominal control program for the propulsion system for two types of electric thrusters and different duration of transfer. Propellant consumption and firing time vs. required transfer duration were analyzed for both types of thrusters.
Текст научной статьи Оптимизация гелиоцентрических перелётов космического аппарата с разнотипными электроракетными двигателями
Одним из путей повышения массовой эффективности космических перелётов является использование маршевой двигательной установки (ДУ) на базе электроракетных двигателей (ЭРД), обладающих высокой скоростью истечения [1–6]. Такие ДУ требуют наличия на борту энергоустановки повышенной мощности. Панели солнечных батарей, хорошо зарекомендовавшие себя в околоземном пространстве, становятся практически бесполезными при полётах за орбиту Марса и Юпитера из-за снижения относительной мощности солнечного излучения с удалением от Солнца. Использование же для межпланетных космических аппаратов (КА) ядерных энергоустановок сдерживается отсутствием опыта их применения в качестве энергоустановки для ЭРД.
Международный проект «Демокри-тос» [7] направлен на проведение одновременного испытания ядерной энергоустановки (Россия, ГНЦ ФГУП «Центр Келдыша») и целого набора электро-ракетных двигателей различных стран. Планируется, что КА «Демокритос» будет иметь универсальную платформу ДУ, работающих на одном рабочем теле (ксеноне), которая позволит устанавливать различные конфигурации ЭРД, созданных в России (ИД-500), Германии ( HIPARC, MARC, SX3, THITUS, RIT-2X, RIT-2X-HS, RIT-2X-HS+, RIT-3X, RIT-4X ), Австрии ( NANO, NANO R3, NANO IR3,
Micro R3, NEO ), Франции ( PPS-20k ), Италии ( НТ-20k ), Японии ( ХР-6 ), США ( HiPEP, NEXIS DM 1, NASA-457M, 457Mv2 ). Например, на рис. 1 изображена одна из рассматриваемых проектных конфигураций ДУ из 22 ЭРД четырёх типов производства Германии ( SX3, RIT-3X, HIPARC, RIT-2x-HS+ ) [8]. Пилотной целью проекта являются полёт на Марс, возвращение на Землю и перелёт в систему Юпитера для исследования Европы [9].
Для выполнения проекта «Демо-критос», кроме технического согласования всех компонентов проекта, требуется разработать методику формирования номинальной программы управления ДУ, содержащей разнотипные ЭРД. Подобная, но более общая задача, решалась в классической работе [6], где изучалось оптимальное сочетание двигателей ограниченной скорости истечения (большой тяги) и ограниченной мощности (малой тяги). В данной статье описывается методика оптимизации программного управления и соответствующих траекторий движения для КА с ДУ, имеющей в своём составе только нерегулируемые ЭРД малой тяги, имеющие различные фиксированные характеристики (тягу и скорость истечения).
Проектная схема КА (рис. 1) предполагает, что изменение направления вектора тяги осуществляется за счёт поворота КА относительно центра масс, каждый ЭРД (или группа ЭРД) могут быть включены или выключены независимо.
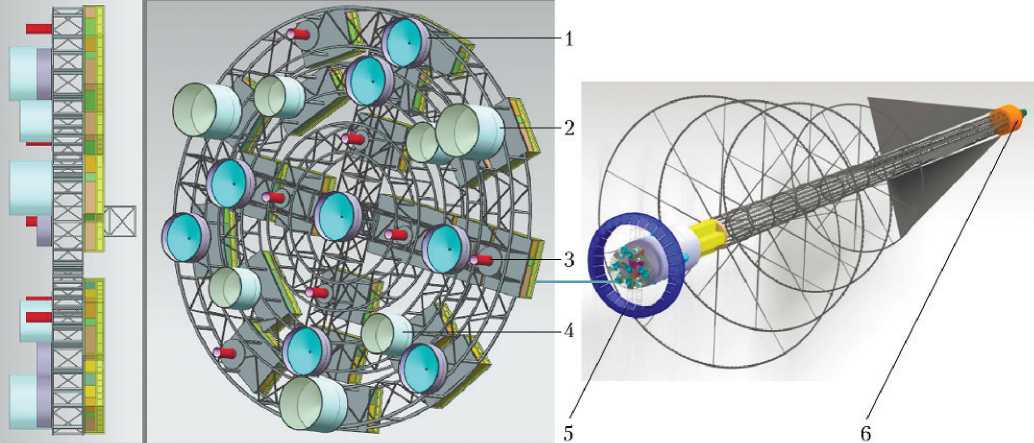
Рис. 1. Схема расположения электроракетных двигателей на космическом аппарате «Демокритос»: 1 — SX3;
2 — RIT-3X; 3 — HIPARC; 4 — RIT-2x-HS+; 5 — универсальная плафторма двигательной установки; 6 — ядерная энергоустановка [8]
Кроме того, предполагается, что мощности энергоустановки достаточно для одновременной работы всех ЭРД, входящих в ДУ. С учётом этих технических ограничений мы приходим к нижеследующей постановке задачи.
случае для получения оптимальных
законов управления и соответствующих им траекторий движения оправдано
Методика формирования оптимальной номинальной программы управления
Управление КА осуществляется изменением единичного вектора направления маршевого ускорения е и включе-нием/выключением двигателей (функция δ ∈ {0, 1}). Требуется определить программу управления ДУ из n двигателей u(t) = (e, δ1, …, δn)T, обеспечивающую выполнение цели миссии за заданное время T с минимальной массой израсходованного рабочего тела Tn mРТ = ∫ ∑βiδidt → min, здесь βi — секундный 0 i = 1
расход рабочего тела, а δ i — функция включения/выключения для i -го двигателя. Запишем уравнения гелиоцентрического движения КА в безразмерном виде
d r
dt = V ;
dV = n a0iδi dt g i = 1 1 – m
dm dt
∑ n a 0 i δ i i = 1 c i
здесь r , V — гелиоцентрические безразмерные радиус-вектор и скорость КА соответственно; g — безразмерное ускорение от гравитационных сил; m — масса израсходованного рабочего тела, отнесённая к стартовой массе; a 0 i и c i — безразмерные величины ускорения и скорости истечения i -го двигателя соответственно.
Существуют различные методики решения задач об оптимальном управлении КА с малой тягой. Для оптимизации сложных, многовитковых и некомпланарных траекторий особенно актуальна методика, основанная на использовании дискретного множества псевдоимпульсов, предложенная и обоснованная доктором наук Ю.П. Улыбышевым [10]. Однако в рассматриваемом модельном
использование принципа максимума Понтрягина, так как траектории имеют небольшую угловую дальность с монотонным изменением фазовых координат.
Введём векторы фазовых координат x = ( r , V , m ) T и сопряжённых переменных ψ = ( ψ r , ψ V , ψ m ) T и составим гамильтониан:
H = ψ rV + ψ V ×
×
n g + e ∑ i = 1
a 0 i δ i
1 – m
n
+ ψm ∑
i = 1
a 0 i δ i
.
c
i
Легко получить, что оптимальное
направление ускорения определяется
тривиальной
формулой e opt
ψ
V
. С учё-
| ψ V |
том этого, функция включения/выклю-чения двигателей определяется следую-
щим выражением:
| ψ | ∑ n a 0 i δ i
V i = 1 1 – m
n a0iδi + ψm ∑ i = 1 ci
n
= ∑
i = 1
| ψ V | + ψ m 1 – m c i
a 0 i δ i
Согласно дифференциальному уравнению для сопряжённого множителя ψ m
d ψ m = – ∂ H = –| | ∑ n a 0 i δ i , dt ∂ m ψ V i = 1 (1 – m )2
ψ m ( t ) является невозрастающей функцией, так как правая часть выражения (4) всегда меньше или равна нулю (в случае, когда все двигатели выключены). Согласно условию трансверсальности, в конечный момент времени функция ψ m ( t ) должна принимать отрицательное значение, поэтому нормировка
ψ m ( t = 0) = –1
обеспечит выполнение этого условия, так как значение ψ m будет отрицательным всегда в процессе движения.
Обозначим x = |ψ m |, y
разуем формулу (3) к виду
| ψ V |
1 – m
и преоб-
n
H δ( x , y ) = ∑ – x + y a 0 i δ i .
г - 1k c }
г - 1
i
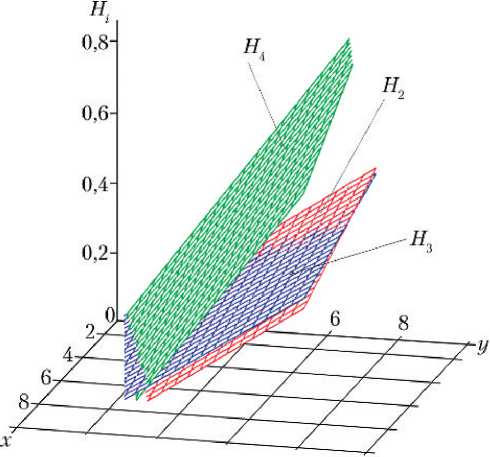
Проиллюстрируем определение максимума H δ( x , y ) графически. На рис. 2, а показаны значения выражения (6)
Таким образом, максимум гамильтониана по функциям включения/вы-ключения δ i определяется линейным выражением, коэффициенты которого зависят от скорости истечения используемых ДУ и не меняются для всего перелёта, а переменные x , y являются функциями фазовых координат и сопряжённых переменных от текущего времени. Поскольку массив возможных значений функций включения/вы-ключения является конечномерным, то максимум выражения (6) определяется взаимным расположением 2 n плоскостей, а n -мерное пространство значений δ i разделяется на области проекциями линий пересечения этих плоскостей.
Рассмотрим простейший случай использования ДУ с двумя типами ЭРД: десять двигателей ИД-500 с тягой одного двигателя 0,7 Н и скоростью истечения РТ 75 000 м/с [11] и десять двигателей HiPEP с тягой одного двигателя 0,67 Н и скоростью истечения РТ 96 000 м/с [12]. Будем считать, что на границе сферы действия Земли КА имеет стартовую массу 20 000 кг. Безразмерные характеристики такой двигательной установки показаны в табл. 1. В этой же таблице приведены обозначения для выражения (6) в возможных четырёх вариантах включения/выклю-чения двигателей.
Таблица 1
Характеристики используемых ЭРД и возможные варианты их включений/выключений
|
Параметры |
ИД-500 |
HiPEP |
|
|
a 0 i |
0,059 |
0,056 |
|
|
c i |
2,518 |
3,223 |
|
|
δ i |
H (0,0) = H 1 |
0 |
0 |
|
H (0,1) = H 2 |
0 |
1 |
|
|
H (1,0) = H 3 |
1 |
0 |
|
|
H (1,1) = H 4 |
1 |
1 |
|
Примечание. a 0 i и c i — безразмерные величины ускорения и скорости истечения i -го двигателя соответственно; δ i — функция включения/выключения для i -го двигателя.
в зависимости от переменных x , y . Четыре плоскости образуют шесть линий пересечения (четыре линии попарно совпадают), показанные на рис. 2, б .
а)
б)
Рис. 2. Значения выражения (6) (а) и соответствующие линии переключения программы управления (б) (рисунок — результат исследования авторов)
Рассмотрим теперь определение оптимальных функций включения/вы-ключения для n двигателей. Каждое слагаемое выражения (6) вида – + y
c
i может принимать либо положительное, либо отрицательное значение. Во вто-
ром случае для обеспечения H δ( x , y ) следует положить вующее δ i = 0 (выключить который даёт отрицательное
максимума соответст-двигатель, значение
скоростью истечения на траектории движения включаются только совместно с двигателями с большей скоростью истечения.
– x + y ). c
Таким образом, на плоскости
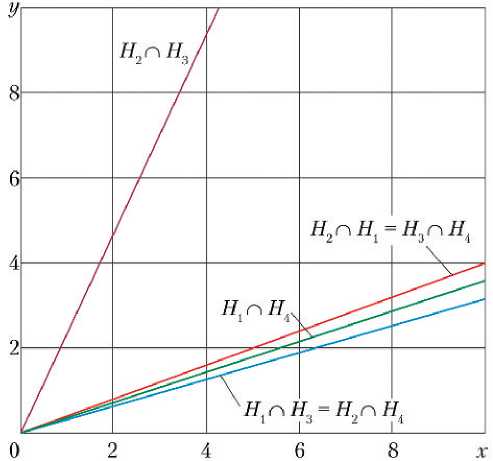
x, y имеется n линий переключения x вида y = . Если фазовая точка в ка- c i кой-то момент времени оказывается выше этой линии, то соответствующий этой линии двигатель должен быть включён (δi = 1), если ниже, то выключен (δi = 0). То есть функция вклю-чения/выключения i-го двигателя имеет такой же вид, как при использовании одного типа двигателей [3, 5]:
x y ≤ c ;
i
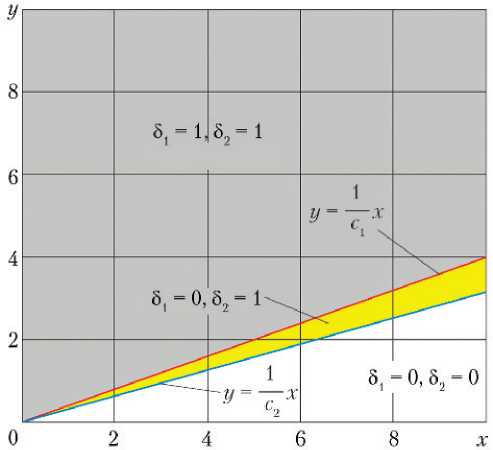
Рис. 3. Полученные области включения/выключения десяти двигателей ИД-500 δ 1 и десяти HiPEP δ 2 (c1< c2 ) (рисунок — результат исследования авторов)
δ i opt
или
δ i opt
1,
0,
1,
где i = 1 ... n .
x y > c , i
| ψ V |
1 – m
| ψ V |
1 – m
|ψm| c i
≤ 0;
|ψ m | c i
> 0,
Однако в случае использования разнотипных двигателей (с различными скоростями истечения), в фазовом пространстве имеется не одна, а n линий переключения (совпадающие при одинаковых скоростях истечения двигателей). Например, на рис. 3 показаны линии переключения для случая использования десяти двигателей ИД-500 и десяти HiPEP . Важно отметить, что область включения/вы-ключения двигателей с набором {δ1 = 1, δ2 = 0} отсутствует. То есть на траектории включены либо двигатели с большей скоростью истечения (более экономичные с точки зрения расхода рабочего тела), либо оба типа двигателей, либо все двигатели выключены. Двигатели с меньшей
В данной работе мы моделируем только гелиоцентрический участок движения Земля – Марс с заданной длительностью перелёта T . Предполагается, что космический аппарат начинает движение, находясь в плоскости эклиптики, на границе сферы действия Земли с нулевым избытком геоцентрической скорости. Поставленная задача поиска оптимального номинального управления сводится к двухточечной краевой задаче. Поскольку рассматривается перелёт с нефикcи-рованной угловой дальностью ϕ, то из условий трансверсальности следует, что соответствующая сопряжённая переменная ψϕ( T ) = 0, а так как d ψ ∂ H
= -"d^- = 0, то v/ t ) = 0. С учётом нормировки (5) для компланарного перелёта можно использовать следующую постановку краевой задачи.
Требуется найти такие начальные значения трёх сопряжённых переменных по радиус-вектору ψ r , радиальной ψ Vr и трансверсальной ψ V ϕ составляющих скорости космического аппарата, чтобы выполнялись начальные и конечные условия, соответствующие положениям Земли и Марса на плоскости эклиптики.
r = r0, ϕ = ϕ0, t = 0,
ψ r = x 1, ψϕ = 0,
m = 0, V r = V r 0 , V ϕ = V ϕ0, ψ m = –1, ψ Vr = x 2, ψ V ϕ = x 3,
r ( T ) = r к, t = T ,
ψ r ( T ) - не фикс. ,
ϕ( T ) - не фикс. ,
m ( T ) → min, Vr ( T ) = Vr к,
V ϕ ( T ) = V ϕ к
ψϕ( T ) = 0,
ψ m ( T ) < 0, ψ Vr ( T ) - не фикс ., ψ V ϕ ( T )
не фикс.
Система дифференциальных уравнений движения (1) и сопряжённых переменных с учётом оптимальной номинальной программы управления e opt, δ i opt интегрировалась численно с использованием метода Рунге–Кутты 4-го порядка. Краевая задача решалась модифицированным методом Ньютона с помощью авторского программного комплекса [13].
Результаты моделирования перелёта Земля – Марс для оптимальной номинальной программы управления
Разработанная методика позволила получить оптимальные программы номинального управления для перелётов Земля – Марс различной длительности (от 225 до 350 сут) для КА со стартовой массой 20 000 кг с двигательной установкой из 20 двигателей — десяти двигателей ИД-500 (в дальнейшем они называются двигателями первого типа) и десяти HiPEP (двигатели второго типа). В табл. 2 показаны начальные значения сопряжённых переменных, полученные численно в ходе решения краевой задачи (8) и округлённые до восьмой значащей цифры.
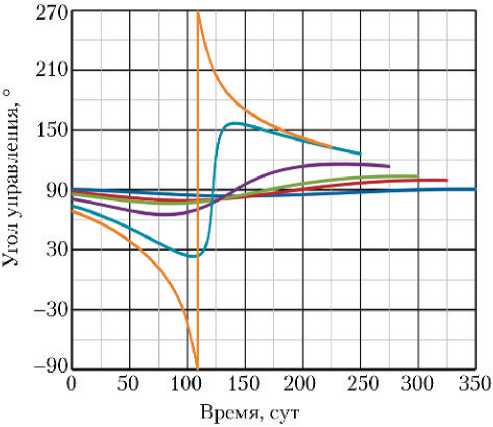
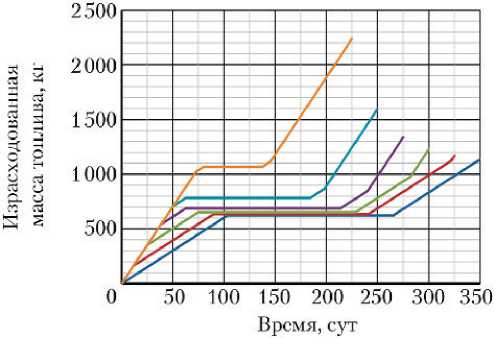
На рис. 4 показаны программы оптимального управления углом направления тяги (рис. 4, а) и изменение массы израсходованного рабочего тела (рис. 4, б) за перелёт. Можно отметить, что для перелётов, имеющих большую длительность, оптимальное направление тяги, показанное на рис. 4, а, незначительно отклоняется от трансверсального направления. Однако, чем меньшее время перелёта требуется (более энергетически напряжённые перелёты), тем больше диапазон изменения угла управления.
Участки работы различных типов двигателей на графике изменения относительного расхода рабочего тела (рис. 4, б ) характеризуются различными углами наклона, соответствующими различному относительному секундному расходу рабочего тела. Пассивные участки на траектории движения соответствуют горизонтальным «полкам». Меньший угол наклона графиков соответствует работе группы наиболее экономичных двигателей второго типа ( HiPEP ), больший — работе обеих групп двигателей ( HiPEP и ИД-500). Можно заметить, что при большой длительности перелёта (350 сут) на траектории движения включается только группа из десяти наиболее экономичных (с точки зрения расхода рабочего тела) двигателей ( HiPEP ) и сохраняется традиционная структура управления — два активных участка в начале и конце траектории, разделённые пассивным участком. При сокращении требуемой длительности перелёта в начале и конце траектории появляются участки с включением обеих групп двигателей ( HiPEP и ИД-500). По мере сокращения требуемой длительности перелёта продолжительность участков с работой двух типов двигателей увеличивается, их положение в начале и конце траектории сохраняется.
Таблица 2
Начальные значения сопряжённых переменных, полученные численно в ходе решения краевой задачи
|
Переменные |
Длительность перелёта, сут |
|||||
|
350 |
325 |
300 |
275 |
250 |
225 |
|
|
ψ r |
0,31801591 |
0,37388818 |
0,39006033 |
0,44751997 |
0,62418820 |
1,4426302 |
|
ψ Vr |
–0,0023053011 |
0,013895861 |
0,03104925 |
0,082289150 |
0,21575284 |
0,64912410 |
|
ψ V ϕ |
0,31864954 |
0,40401794 |
0,43040058 |
0,52059114 |
0,75192782 |
1,6672334 |
а)
б)
Рис. 4. Оптимальные программы управления углом направления тяги (а) и изменение массы израсходованного рабочего тела (б) для перелётов Земля – Марс различной длительности: ^— — 225 сут; ^— — 250 сут; ^— — 275 сут; ^— — 300 сут; ^— — 325 сут; ^— — 350 сут (рисунок — результат исследования авторов)
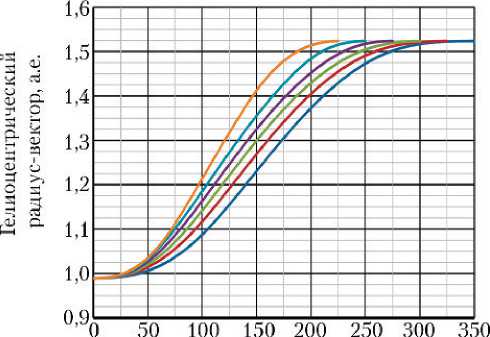
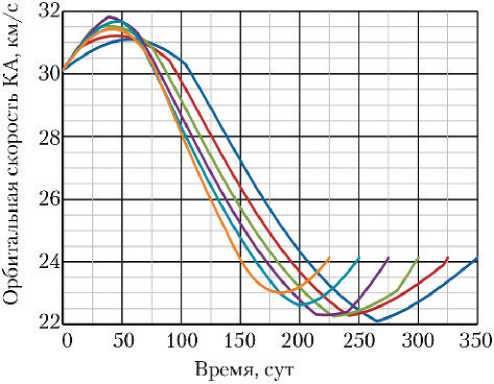
На рис. 5 показаны соответствующие изменения фазовых координат КА: гелиоцентрического радиус-вектора (рис. 5, а ) и величины орбитальной скорости (рис. 5, б ). Начало и конец фазовых траекторий совпадают с соответствующими фазовыми координатами Земли и Марса. Изломы на графиках изменения величины скорости КА соответствуют моментам изменения режима работы ДУ.
На рис. 6 показаны гелиоцентрические траектории перелётов Земля – Марс длительностью 225…350 сут. Условно все траектории показаны исходящими из одной точки пространства, хотя известно, что даты старта для перелётов различных длительностей будут различны. В табл. 3 показаны длительности участков с работой только двигательной установки второго типа Тм2 и одновременной работы всех двигателей Тм1 (эта же переменная определяет моторное время для ДУ первого типа), относительная m и полная масса MРТ израсходованного рабочего тела для перелётов Земля – Марс с различной длительностью.
Время, сут
а)
б)
Рис. 5. Изменение фазовых координат КА — гелиоцентрического радиус-вектора (а) и орбитальной скорости (б) — для перелётов Земля – Марс различной длительности: ^^ — 225 сут; ^^ — 250 сут.; ^^ — 275 сут; ^^ — 300 сут; ^^ — 325 сут; ^^ — 350 сут (рисунок — результат исследования авторов)
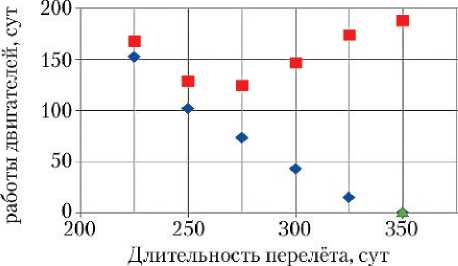
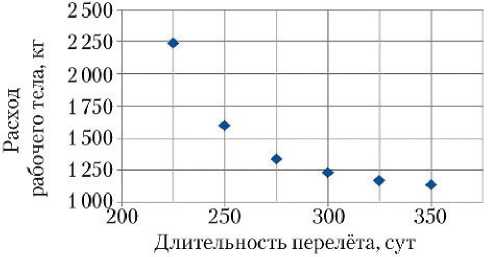
Приведённые на рис. 7 данные показывают, что за счёт подключения ДУ первого типа на участках траектории с наибольшей эффективностью воздействия (соответствует точкам отлёта и прибытия) удаётся уменьшать длительность работы ДУ второго типа. При этом расход рабочего тела увеличивается незначительно при существенном
(350…275 сут) уменьшении длительности перелёта. И только дальнейшее требуемое сокращение длительности приводит к сокращению величины общего пассивного участка и существенному увеличению массы требуемого рабочего тела. Кроме того, подключение ДУ первого типа (с меньшей скоростью истечения) позволяет сократить требуемое время работы ДУ второго типа (с большей скоростью истечения).
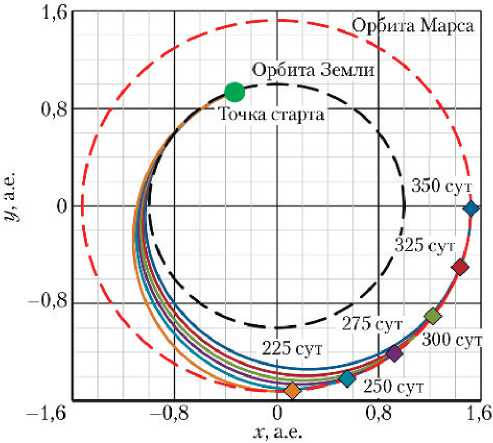
Рис. 6. Траектории перелётов Земля – Марс различной длительности: ^^ — 225 сут; ^^ — 250 сут.; ^^ — 275 сут; ^^ — 300 сут; ^^ — 325 сут; ^— — 350 сут; ♦ , ♦ , ♦ , ♦ , ♦ , ♦ — конечные точки для траекторий разной длительности (рисунок — результат исследования авторов)
Таблица 3
Зависимость длительности работы двигательной установки, относительной и полной массы рабочего тела от длительности перелёта Земля – Марс
|
Параметры |
Длительность перелёта, сут |
|||||
|
350 |
325 |
300 |
275 |
250 |
225 |
|
|
Т м1 , сут |
0 |
15,06 |
42,55 |
72,97 |
101,77 |
151,96 |
|
Т м2 , сут |
187,76 |
173,63 |
146,37 |
123,81 |
128,69 |
167,71 |
|
m |
0,0567 |
0,0584 |
0,0613 |
0,0667 |
0,0798 |
0,1118 |
|
M РТ , кг |
1 134 |
1 168 |
1 226 |
1 334 |
1 596 |
2 236 |
Рассматриваемый проект «Демокри-тос» предполагает многократное использование КА для различных межпланетных перелётов. Предполагается, что первый испытательный полёт продлится около девяти лет. Космический аппарат после достижения Марса вернётся к Земле и затем совершит перелёт к спутнику Юпитера Европе. Для таких длительных перелётов необходимо учитывать ограничение на ресурс работы электроракетных двигателей. Полученные данные указывают на возможность соблюдать это ограничение за счёт использования двигательных установок с разнотипными двигателями, позволяющими сокращать моторное время двигателей одного типа за счёт подключения двигателей второго типа.
а)
б)
Рис. 7. Параметры работы двигательной установки: а — длительность участков совместной работы двигательных установок обоих типов ( ■ ) и только второго типа ( ♦ ); б — суммарный расход рабочего тела для перелётов Земля – Марс различной длительности (рисунок — результат исследования авторов)
Заключение
Разработанная методика формирования номинальной оптимальной программы управления показала эффективность для баллистической оптимизации межпланетного перелёта Земля – Марс для КА с ядерной энергоустановкой и маршевой ДУ, составленной из разнотипных ЭРД. Полученные для широкого диапазона длительностей перелёта (225…350 сут) результаты демонстрируют, что использование ЭРД с различными характеристиками в составе одной двигательной установки расширяет возможности проектно-баллистической оптимизации КА. Кроме того, использование ЭРД с различными скоростями истечения рабочего тела позволяет сократить длительность работы отдельных двигателей и выполнить возможное ограничение на ресурс работы. Однако использование подобных ДУ требует проведения тщательного проектного анализа с учётом массы рассматриваемых разнотипных ЭРД на предмет возможного увеличения сухой массы КА. Такое исследование авторами статьи планируется в дальнейшем.
Исследование выполнено за счёт гранта Российского научного фонда № 22-29-01092.
Список литературы Оптимизация гелиоцентрических перелётов космического аппарата с разнотипными электроракетными двигателями
- Луна — шаг к освоению Солнечной системы / Под научн. ред. B.П. Легостаева и В.А. Лопоты. М.: PKK «Энергия», 2011. 584 с.
- Кауфман Г.Ф. Физико-технические основы ионных двигателей с замкнутым дрейфом электронов // Аэрокосмическая техника. 1985. № 5. C. 1бЗ-177.
- Пешухов В.Г. Оптимизация межпланетных траекторий космических аппаратов с идеально-регулируемым двигателем методом продолжения // ^смические исследования. 2008. Т. 4б. Вып. З. C. 224-2З7.
- Гришин С.Д., Лесков Л.В. Электрические ракетные двигатели космических аппаратов. М.: Машиностроение, 1989.
- Консшаншинов М.С., Пешухов В.Г., Тейн М. Оптимизация траекторий гелиоцентрических перелётов. М.: Изд-во МАИ, 2015. 2-е изд. 2б0 с.
- Гродзовский Г.Л., Иванов Ю.Н., Токарев В.В. Механика космического полёта с малой тягой. М.: Наука, 19бб. б80 с.
- Jansen F., Andreussi T., Bergmann B., Bittner M., Brandt T., Cesarretti G., Damme F., Ehresmann M., Herdrich G., Detsis E., Ferraris S., Funaki I., Funke O., Girard N., Grundmann J.T., Guimaraes L.N.F., Hillebrandt M., Koroteev A.S., Krejci D., Kuijper J.C., Leiter H., Masson F., Maiwald V., Misuri T., Oberst J, Oriol S., Piragino A., Petukhov V., Popov G.A., Pospisil S., Price C., Richter M., Reissner A., Reynders M., Rozhkov M., Schanz L., Schmidt-Tedd B., Semenkin A.V., Solodukhin A.E., Starinova O, Stekl I., Tinsley T., Tosi M.C., Worms J.-C., Wüst S. Humans to Mars: by MARS-plus EUROPA-INPPS Flagship Mission // Proceedings of Global Space Exploration Conference (GLEX 2021), St Petersburg, Russian Federation, 14-18 June 2021. 7p. URL: https://elib.dlr. de/185800/1/GLEX04062021JansenetalMars flagshippaper.pdf (accessed 18.12.2022).
- Jansen F., Bittner M, Damme F., Ehresmann M, Funke O., Grill J., Grundmann J.T., Herdrich G., Hillebrandt M., Leiter H., Maiwald V., Oberst J., Richter M., Reynders M., Schanz L.-C., Schmidt-Tedd B., Wüst S., Worms J.-C., Girard N, Ferraris S., Tosi M.C., Misuri T., Krejci D., Kuijper J., Brandt T, Solodukhin A.E, Petrukovich A., Funaki I., Tinslay T., Guimaräes L.N.F., Gonzalez del Amo J., Schmidt G. Mars-plus Europa-INPPS flagship missions with high power electric thrusters and heavy science payload // 8th Russian-German Conference on Electric Propulsions and their Application (Hybrid), Kaliningrad, Russia, 11-15 April 2021. URL: https://www.researchgate.net/ publication/359403139_Mars-_plus_Europa-INPPS_Flagship_Missions_with_High_Power_ Electric_Thrusters_and_Heavy_Science_ Payload (accessed 18.12.2022).
- Jansen F., Bergmann B., Brandt T., Damme F., Detsis E., Ferraris S., Findlay J.AP, Funaki I., Funke O, Grundmann J.T., Guimaraes L.N.F., Hillebrandt M, Koroteev A.S., Kühn D., Kuijper J.C., Masson F., Maiwald V., Oberst J., Oriol S, Pospisil S., Richter M, Schanz L., Semenkin A.V., Solodukhin A.E., Stekl I., Tinsley T, Tosi M.C., Waldmann Ch, Worms J.-C. MARS/EUROPA INPPS flagship high power space transportation // Proceedings of 70th International Astronautical Congress (IAC), Washington D.C., United States, 21-25 October 2019. URL: https:// www.dfki .de/file admin/user _uplo ad/ import/10731_20191205_MARS _EUR OPA_ INPP S _Flagship _High _P ower _Space _ Transportation.pdf (accessed 18.12.2022).
- Улыбышев Ю.П. Обзор методов оптимизации траекторий космических аппаратов с использованием дискретных множеств псевдоимпульсов // Космическая техника и технологии. 2016. № 4(15). С. 67-79.
- Ловцов А.С., Селиванов М.Ю. Огневые испытания ионного двигателя высокой мощности для перспективных транспортных модулей / / Известия РАН. Энергетика. 2014. № 6. С. 3-9.
- Foster J., Haag T., Patterson M., Williams G.J.Jr., Sovey J.S., Carpenter C., Kamhawi H., Malone S, Elliot F. The high power electric propulsion (HiPEP) ion thruster // Proceedings of 40th AIAA/ ASME/SAE/ASEE Joint Propulsion Conference and Exhibit. Fort Lauderdale, Florida, July 11-14, 2004. 12 p. URL: https://ntrs. nasa.gov/api/citations/20040139 4 7 6/ downloads/20040139476.pdf (accessed 18.12.2022).
- Старинова О.Л., Сергаева Е.А., Рожков М.А. Определение оптимального управления движением космического аппарата с электроракетной двигательной установкой, применяя принцип максимума Понтрягина / Свидетельство о праве на интеллектуальную собственность, рег. № 2022617890 от 18.03.2022. Опубликовано: 26.04.2022. Статья поступила в редакцию 15.12.2022 г. Окончательный вариант — 19.12.2022 г.
