Оптимизация измерительных преобразователей на основе согласованной фильтрации и технологии поверхностных акустических волн

Автор: Богословский Сергей Владимирович
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Приборные исследования и методики
Статья в выпуске: 3 т.20, 2010 года.
Бесплатный доступ
Исследуются предельные возможности предложенной ранее автором топологии чувствительного элемента на основе согласованной фильтрации запросного импульса с использованием дисперсионной линии задержки. Рассмотрены критерии оптимизации. Построены расчетные модели. Приведены результаты моделирования применительно к предельному варианту топологии. Определена эффективная аппроксимация результатов моделирования.
Датчики, поверхностные акустические волны, дисперсионные линии задержки
Короткий адрес: https://sciup.org/14264665
IDR: 14264665 | УДК: 621.372.6
Sensor optimization based on the surface acoustic waves filtration technology
The limits of the previously proposed by the author sensitive element topology based on the matched filtering uplink pulse with dispersive delay line were studied. The criteria optimization was discussed. Computational models were constructed. Results of the modeling with respect to the limiting version of topology and effective approximation of the simulation results were discussed.
Текст научной статьи Оптимизация измерительных преобразователей на основе согласованной фильтрации и технологии поверхностных акустических волн
Математические модели согласованной фильтрации наиболее подробно рассмотрены в работе [1], а измерительные преобразователи на основе поверхностных акустических волн (ПАВ) — в работах [1, 2, 3]. Однако до настоящего времени отсутствуют публикации о применении методов согласованной фильтрации для синтеза структур различных измерительных преобразователей ПАВ в зависимости от их назначения и условий применения.
Задачей данной работы является разработка инженерных методов проектирования структур датчиков, реализующих согласованную фильтрацию ПАВ.
К проектированию ПАВ-датчиков предъявляется ряд требований, которые могут быть и противоречивыми, например обеспечение следующих характеристик:
-
- максимальная энергия выходного (переизлу-ченного) сигнала;
-
- максимальная чувствительность к изменению топологии (структуры) рабочей поверхности пьезоэлектрической пластины.
Эти и другие требования являются количественно неопределенными, однако они должны быть выполнены с учетом ограничений, лишь некоторые из которых известны до начала проектирования, например такие:
-
- максимальная импульсная мощность зондирующего сигнала передатчика не должна превышать 2 Вт;
-
- максимальная средняя мощность зондирующего сигнала передатчика не должна превышать 10 мВт;
-
- частоты сигналов должны принадлежать разрешенным диапазонам частот (433 - 434; 867 - 869; 905 - 926; 2410 - 2490) МГц;
-
- максимальная длительность запросного импульса ограничена потерями в звукопроводе и, как правило, не превышает 10 мкс.
Аналогичные требования необходимо предъявлять и к системам пассивной идентификации. Пассивные радиометки должны вносить минимальные потери в полученную от передатчика энергию. Возможна и другая интерпретация — минимальное уменьшение средней переизлученной мощности.
ОСОБЕННОСТИ СОГЛАСОВАННОЙ ФИЛЬТРАЦИИ В ЗАДАЧАХ
ИДЕНТИФИКАЦИИ И ИЗМЕРЕНИЯ
Акустоэлектронная радиометка, в рассматриваемом случае на ПАВ, является средством кодирования, т. е. видоизменяет принятую последовательность в переизлученную последовательность с минимальными потерями энергии. В простейшем случае радиометка переставляет элементы полученной последовательности в предопределенном порядке. Зная исходную последовательность и закон ее изменения (перестановки), можно реализовать согласованную фильтрацию переизлученной радиометкой кодовой последовательности (рис. 1).
Предложенная система идентификации на основе ПАВ-технологий полностью соответствует принципам линейной теории кодирования [4]. Для чувствительных элементов датчиков физических величин хорошую эффективность показала топология с дифференциальным дисперсионным преобразователем [5], которую иллюстрирует топо-
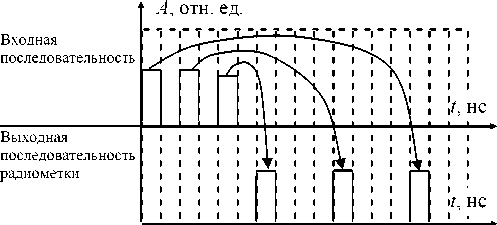
Рис. 1. Схема перекодирования сигнала радиометкой
2 N
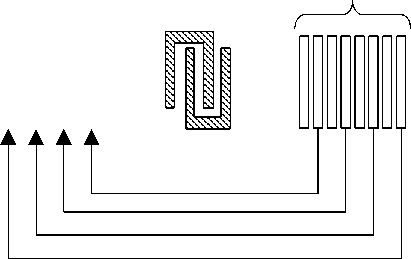
Рис. 2. Модифицированная топология дисперсионной линии задержки на ПАВ логия на рис. 2. Здесь отражающие структуры сгруппированы в 2N отражателей. Топология на рис. 2 в пределе позволяет изменить на π рад разность фаз смежных полупериодов.
МОДЕЛЬ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА
В основу дальнейшего изложения положено известное представление выходного сигнала (отклика) в виде интеграла свертки
t
-
x = j x 1 T ) x 2( t - т )d T , (1)
где х — выходной сигнал измерительного преобразователя, x 1 — зондирующий сигнал, x 2 — импульсная переходная функция измерительного преобразователя, τ — аргумент интегрирования.
x 2 ( t )
x 1 ( t - ф ) = sin( ® 1 t - ф )
x
ω 2
p 2 + ю 2 2
Рис. 3. Структурная схема преобразования входного сигнала ПАВ-датчиком
Из теории ПАВ известно, что зондирующий сигнал x1 и импульсная переходная функция x2 ПАВ-датчиков представляют собой гармонические функции, простейшими моделями которых могут служить синусоиды (косинусоиды), заданные на ограниченном интервале времени. Поэтому без ограничения общности при постановке задачи оптимизации можно принять представление зондирующего сигнала и импульсной переходной функции в виде синусоид x1 (t) = A s ln( ^1 т - ф); x2 (t) = sin(®21), (2) где А — амплитуда зондирующего сигнала, заданного на интервале Tx; ω1 , ω2 — круговые частоты зондирующего сигнала и импульсной переходной функции измерительного преобразователя соответственно; ϕ — сдвиг по фазе.
С учетом (2) модель выходного сигнала (1) ПАВ-датчика:
t x = Ajsin(^lr - ф)sin[^2(t - r)]dт . (3) 0
Из анализа простейшей модели (3) следует, что выходной сигнал ПАВ-датчика зависит от четырех величин: A , ω 1 , ω 2 и ϕ . В более сложных моделях указанные величины могут зависеть от таких параметров реализуемой структуры, как например периодичность, глубина, ширина и профиль элементов отражающих, измерительных и генерирующих структур, характеристики пьезоэлектрической пластины, по поверхности которой распространяются акустические волны, и др.
Модель (3) при постоянном фазовом сдвиге ϕ соответствует преобразованию сигнала в соответствии со структурной схемой рис. 3, где р — параметр преобразования по Лапласу импульсной переходной функции.
Источником энергии является зондирующий сигнал x 1 ( t ) , который воспринимается измерительным преобразователем с импульсной переходной функцией x 2 ( t ) , преобразующим зондирующий сигнал x 1 ( t ) передатчика в выходной сигнал отклика х чувствительного элемента.
Возможны две постановки задачи оптимизации:
-
1) найти зондирующий сигнал x 1 ( t ) , обеспечивающий наибольшую энергию выходного сигнала х ;
-
2) найти значения ϕ , обеспечивающие наибольшую чувствительность параметров выходного сигнала х к изменению фазового сдвига ϕ .
Известно [1], что наибольшая импульсная мощность выходного сигнала получается при импульсной переходной функции x 2 ( t ) , согласованной с зондирующим сигналом x 1 . Поэтому в общем случае необходимо определить вид периодического сигнала, имеющего заданную полосу частот (от ωн до ωв ), согласованная фильтрация которого максимизирует энергию выходного сигнала. Другими словами, требуется найти такой сигнал x 1 ( t ) , который обеспечивает выполнение условия
T j [x(t)]2 d t ^ max , 0 x1
t где x(t) = jх1(т - ф)x2 (t - т)dт .
Например, зондирующий сигнал x 1 ( t ) может иметь вид:
x 1 (т ) = sin( roт ), x1(т ) = sin[( ® „ + кт )т ], x 1 (т ) = sin[ ® ( т ) т ].
Все эти функции должны быть определены на интервале времени [0, T x ].
Задача оптимизации может быть решена в несколько упрощенной постановке. Например, при рассмотрении простейших, линейно-частотно-модулированных (ЛЧМ) сигналов было показано, что оптимальным является значение коэффициента пропорциональности, равное нулю. Наибольшая энергия выходного сигнала для сигналов из класса ЛЧМ-сигналов достигается при нулевых (или близких к нулю) девиациях частот.
В соответствии с законом сохранения энергии верхним пределом энергии в системе рис. 3 является энергия зондирующего импульса — сигнала передатчика
t
E ( t ) = a j х" 2 (т )d т , (4)
где а — коэффициент пропорциональности.
В случае постоянной частоты и при постоянном фазовом сдвиге ф сигнала передатчика x 1 ( t ) =
= A sin( rot ) энергия зондирующего импульса равна
E (t) = aA 2[ t /2 - sin(2 rot )/(4ro)] = = aA 2[ t /2 - Tsin(2rot)/(8п)], где Т — период колебаний входного сигнала, T = 2n
ω .
Поскольку для эффективной работы ПАВ-устройств длительность зондирующего импульса не может быть меньше 5 - 7 периодов сигнала x 1 ( t ), т. е. t > (5 ^ 7)T , то с достаточной точностью можно считать
E ( t ) » aA 2 1 /2. (5)
Из формулы (5) следует, что в первом приближении энергия зависит только от амплитуды и длительности и не зависит от частоты зондирующего сигнала.
Далее рассмотрим возможности оптимизации чувствительности выходного сигнала, варьируя значения фазового сдвига. Система дифференциальных уравнений, соответствующая рис. 3:
x = У ,
У = -ro 2 x - ro2 sin( ro 1 1 - ф ).
Система уравнений (6) позволяет моделировать скачкообразное изменение фазового сдвига ϕ на интервале интегрирования.
АППРОКСИМАЦИЯ РЕЗУЛЬТАТОВ ЧИСЛЕННОГО ЭКСПЕРИМЕНТА
На рис. 4 приведены графики нормированных к максимальной величине зависимостей амплитуды выходного сигнала x , полученных в результате численного интегрирования системы (6), и ее аппроксимации функцией
A = |(1 - z )|cos( ф /2) + z (7)
на интервалах фе[-п, п] и фе[-3п, +3п], где z = min A « ——, 2N — число групп отражателей в ϕ 2N отражающей структуре (рис. 2).
Для определения координаты максимальной чувствительности вычислим вторую производную от функции (7), приравняем ее нулю и решим полученное уравнение относительно угла фазового сдвига:
d d 2 d 2 ϕ
—C (Ф) = -тч A (Ф) = TT[(1 - z)cos + z] = dϕ dϕ2 dϕ2 2
-
(1 - z ) Ф п
-
= ---- cos— = 0,
где C(ϕ) — чувствительность амплитуды A(ϕ) сигнала х к изменению фазового сдвига ϕ на смежных полупериодах, C(ф) = —A(ф). Корень dϕ этого уравнения ф = ± п.
Следовательно, наибольшего значения чувствительность достигает на концах интервала [ - п , п ] : C max ( ± п ) = + 2 отн. еД. / раД.
Изменение фазы сигнала на π эквивалентно изменению скорости ПАВ на 0.05 % при задержке, равной 1 мкс на частоте 1 ГГц (915 МГц). Применение высокочувствительных срезов позволит в несколько раз увеличить чувствительность.
