Оптимизация линейных систем с закрепленными концами траекторий и квадратичным функционалом при наличии ограничений

Автор: Калимолдаев Максат Нурадилович, Мурзабеков Заинелхриет Нугманович, Джусупов Арыстан Айткужаевич, Мурзабеков Асан Заинелхриетович
Журнал: Проблемы информатики @problem-info
Рубрика: Теоретическая информатика
Статья в выпуске: 1 (9), 2011 года.
Бесплатный доступ
Рассматривается задача оптимального управления для линейных нестационарных систем с закрепленными концами траекторий. Предложен конструктивный алгоритм управления с учетом ограничений.
Задача оптимального управления, система дифференциальных уравнений, множители лагранжа, синтезирующее управление, квадратичный функционал
Короткий адрес: https://sciup.org/14320048
IDR: 14320048 | УДК: 62-52
Текст научной статьи Оптимизация линейных систем с закрепленными концами траекторий и квадратичным функционалом при наличии ограничений
Введение. В наиболее известных работах в области моделирования и автоматического управления можно найти примеры удачной постановки и решения различных задач [1–4]. Многие задачи оптимального управления рассматриваются в двух постановках. Согласно одной из них оптимальное управление ищется как функция времени и начального состояния системы. Другая постановка задачи синтеза предполагает поиск оптимального управления в виде некоторой функции текущего состояния управляемой системы и времени.
В основе решения задач оптимального управления в первой постановке лежит принцип максимума Понтрягина [5] (решение сводится к соответствующей краевой задаче), а решение той же задачи во второй постановке основано на динамическом программировании (задача сводится к решению уравнения Беллмана [6]).
Разработка различных способов построения алгоритмов управления, обладающих необходимыми для приложений свойствами, является актуальной задачей современных информационных технологий [7].
В данной работе рассматривается постановка задачи оптимального управления, когда для управляемой системы задаются оба граничных условия. Предлагается конструктивный алгоритм управления, основанный на принципе обратной связи с учетом ограничений. Задача оптимального управления системами с закрепленными концами траекторий возникает, например, при исследовании динамики робототехнических и электроэнергетических систем, химических и ядерных реакторов. В простейшем случае динамика исследуемых систем может быть описана линейными дифференциальными уравнениями, критерием качества управления может служить квадратичный функционал.
Постановка задачи. Рассмотрим задачу об оптимальном управлении линейной нестационарной системой в соответствии с квадратичным критерием качества при наличии огра- ничений на управления. Если компоненты управляющего вектора не ограничены по величине, то для управляемой линейной системы можно найти аналитически оптимальные управления и оптимальные траектории.
Пусть управляемая система описывается системой дифференциальных уравнений x = A(t)x + B(t)u, t E (t0,T);(1)
x(t0) = xо, x(T) = 0; u(t) E U(t) = {u|a(t) < u(t) < в(t), t E (tо,T),(2)
а, в E C [ t о ,T ], a < 0, в > 0 }c L 2(( t о ,T), Rm),(3)
где x = x ( t ) — вектор состояния объекта управления размерности n х 1; u = u ( t ) — вектор управляющих воздействий размерности m х 1; A ( t ) , B ( t ) — заданные непрерывные и ограниченные матрицы размерности n х n и n х m соответственно; x 0 — заданный вектор.
Обозначим через A( 1 0 , T, x 0 ) множество всех допустимых управлений, удовлетворяющих условию u ( t ) E U ( t ) , t E ( t о ,T ) , и соответствующих траекторий x ( t, u ) системы (1) , определенных на отрезке t о < t < T , т. е. множество допустимых пар { x ( t ) , u ( t ) } :
A(tо, T, x0) = {(x, u): u(t) E U(t), x(t)= A(t)x(t) + B(t)u(t), tо < t < T, x (tо) = x0, x (T) = 0}.
Пусть на множестве (4) задан функционал
T
J(x, u) = 2 У [x*Q(t)x + u*R(t)u] dt, t0
где Q ( t ) , R ( t ) — заданные симметричные непрерывные и ограниченные матрицы размерности n х n и m х m соответственно, удовлетворяющие условиям Q ( t ) > 0 (неотрицательноопределенная), R ( t ) > 0 (равномерно положительно-определенная).
Предположим, что множество (4) не пусто и система (1) управляема, т. е. выполняется условие
T
G (t о ,T )= / t0
Ф( t о ,t ) B ( t ) B * ( t )Ф * ( t о ,t ) dt > 0 ,
где Ф(t,T) = 6(t)6 1(т); 6(t) — фундаментальная матрица решений системы, описываемой однородным дифференциальным уравнением z, = A (t) z.
Задача. Найти синтезирующее управление й ( x ,t, x 0 ,t о ,T ) , такое что соответствующая ему пара ( x ( t ) , u ( t )) E A( t о ,T, x 0 ) (4) и доставляет минимальное значение функционалу (5).
Для решения поставленной задачи образуем вспомогательный функционал с применением множителей Лагранжа специального вида. Для этого добавим к функционалу (5) систему дифференциальных уравнений (1) с множителем А = K ( t ) x + q ( t ) и выражение Л 1 ( а — u ) + А 2 ( u — в ) , где А i > 0; А 2 > 0 . В результате получим функционал
T
I [2 x * Q ( t ) x + 2 u * R ( t ) u + ( K ( t ) x + q ( t )) * ( A ( t ) x + B ( t ) u — ic)+ t 0
+ A 1 ( x ,t )( a ( t ) — u ) + A 2 ( x ,t )( u — в ( t )) ] dt, (7)
где q = q ( t ) — векторная функция размерности n x 1; K = K ( t ) — симметричная положительно-определенная матрица размерности n x n .
Множитель A = K ( t ) x + q ( t ) снимает ограничения, налагаемые на допустимые пары { x ( t ) , u ( t ) } в виде системы дифференциальных уравнений (1), а функции { A i ( x ,t ) , A 2 ( x ,t ) } — соответствующие ограничения, налагаемые на управления (3).
Для рассматриваемой задачи метод множителей Лагранжа (принцип освобождения от связей) состоит в следующем: исходная задача оптимального управления с ограничениями сводится к другой задаче без ограничений. При этом новая задача формулируется таким образом, чтобы ее решение являлось решением первоначальной задачи [8, 9].
Введем в рассмотрение следующие функции:
v ( x ,t ) = 1 x * K ( t ) x + x * q ( t ) - 1 q * ( t ) W ( t,T ) q ( t ) , Iv = A = K ( t ) x + q ( t ); (8)
2 2 d x
M ( x , u ,t ) = 2 x [ Q ( t ) + K ( t )] x + 2 u R ( t ) u + ( K ( t ) x + q ( t )) ( A ( t ) x + B ( t ) u )+
+ x q ( t ) - q ( t ) W ( t, T ) q ( t ) - 2 q ( t ) W ( t, T ) q ( t )+ A i ( a ( t ) - u )+ A 2 ( u - в ( t )) • (9)
Тогда, используя функции (8), (9), функционал L ( x , u ) (7) представим в следующем виде:
T
L ( x , u ) = v ( x ( 1 0 ) ,t 0 )
— v ( x ( T ) ,T ) + J M ( x , u ,t ) dt^ t 0
Решение задачи . Произведем выбор K, W, q , λ 1 , λ 2 таким образом, чтобы при каждом фиксированном t E ( 1 0 ,T ) функция M ( x , u ,t ) достигала наименьшего значения на паре ( 5с, u ) . Если при этом функция 5с удовлетворяет дифференциальному уравнению (1) при управлении й = u ( x ,t, x 0 ,t 0 ,T ) с условиями (2) , (3) , то такая пара (гс( t ) , ii( t )) является искомым решением поставленной задачи.
Методами дифференциального исчисления находим управление, обеспечивающее минимальное значение функции M ( x , u ,t ) из (10) в следующем виде:
г! = —R 1 ( t )[ B * ( t )( K ( t ) x + q ( t )) — A 1 + A 2 ] •
Обозначим ^ = —R- 1[—A 1 + A2], тогда синтезирующее управление принимает вид тс = —R- 1( t) B* (t)(K (t) x + q (t)) + Ф (x,t) • (11)
Множители A 1 > 0 , A 2 > 0 определим таким образом, чтобы выполнялись условия
A 1 ( a ( t ) — u ) = 0 , A 2 ( u — в ( t )) = 0 • (12)
Для этого осуществим выбор λ 1 , λ 2 , ϕ следующим образом:
A 1 = —R ( t ) inf(0 , w ( x , t ) — a ( t )) , A 2 = —R ( t ) inf(0 , в ( t ) — w ( x , t )) , (13)
Ф(x, t) = — inf(0, w(x, t) — a(t)) + inf(0, в(t) — w(x, t)), где
w ( x , t ) = —R - 1 ( t ) B * ( t )( K ( t ) x + q ( t )) . (14)
Определим функцию M ( x , u ,t ) на управлении, задаваемом формулой (11). Подставляя управление (11) в выражение (9) и группируя подобные члены, получаем функцию
M ( x , й , t ) = ^ x * [ Q ( t ) + K ( t ) A ( t ) + A ( t ) K ( t ) - K ( t ) B ( t ) R - 1 ( t ) B * ( t ) K ( t ) + K ( t )] x +
+2 ^ * R ( t ) ф + ( x - W ( t, T ) q ) * [ q + A * ( t ) q - K ( t ) B ( t ) R - 1 ( t ) B * ( t ) q - W - 1 ( t, T ) B ( t ) ф ] +
+ ( x - W ( t,T ) q ) * W - 1 ( t,T ) B ( t ) ф - 2 q * [ W - W ( t,T ) A 1 ( t ) - A i ( t ) W ( t,T )+
+ B 1 ( t )] q + A 1 ( a ( t ) - U ) + A 2 ( U - в ( t )) . (15)
Осуществим выбор матриц K, W ( t,T ) и функции q ( t ) следующим образом:
-
1) матрица K ( t ) удовлетворяет матричному дифференциальному уравнению
K = -KA(t) - A*(t)K + KB(t)R-1(t)B*(t)K - Q(t), K(to) = Ko;(16)
-
2) матрица W ( t,T ) удовлетворяет матричному дифференциальному уравнению
W = W(t,T)A1(t) + Ai(t)W(t,T) - Bi(t), W(TT) = 0;(17)
-
3) функция q ( t ) удовлетворяет дифференциальному уравнению
q = -A*(t)q + W-1(t,T)B(t)Ф(x,t), q(to) = W-1(to,T)x(to),(18)
где
A 1(t) = A(t) - B (t)R-1(t)B* (t)K(t), B 1(t) = B(t)R-1 (t)B* (t).(19)
Пусть существуют решения уравнений (16)–(18) и выполнены условия (12). Тогда значение функции (15) равно
M(x, 'u ,t) = 2 ф* (x, t)R(t) ф (x ,t).
Здесь учтено соотношение
x(t) = W(t,T)q(t), t G [to, T].(21)
Дифференциальные уравнения, определяющие закон движения для системы (1) с управлением - й ( x ,t ) = w ( x ,t ) + ф ( x ,t ) , представим в следующем виде:
эс = A 1(t)x - B 1(t)q + B(t)ф(x,t), x(to) = xo;(22)
-
<1 = - A1 (t) q + W -1( t, T) B (t) ф (x,t), q (to) = W -1( to ,T) x (to).(23)
В результате минимальное значение функционала L ( x , u ) (10) равно
T
1 1 1
L ( ас , u ) = - O k K ( t o ) x о + x 0 q ( t о ) - -q ( t o ) W ( t о ,T ) q ( t o ) + [ ^ ( x ,t ) R ( t ) ^ ( x ,t )] dt. (24)
2 2 2
t 0
Покажем, что состояние системы (22), (23), соответствующее управлению (11), в конечный момент времени равно нулю, т. е. x ( T ) = 0 . В дифференциальных уравнениях (22), (23) обратим их линейные дифференциальные части и представим их в виде интегральных уравнений
t
t
x ( t ) = Ф( t,t о ) ( x 0 - У Ф( t 0 ,т)B 1 ( т) q ( т)dт + J Ф( t о ,т ) B ( т) у ( x ( т),т ) dт ); (25)
t 0
t 0
q ( t ) = Ф * ( t о ,t )
t q (t о) + У t0
Ф * ( т, t о ) W 1 ( т, T ) B ( т ) у ( x ( т ) , т ) dт
Здесь Ф( t,т ) = 6 ( t ) 6 1 ( т ) — матрица; 6 ( t ) — фундаментальная матрица решений системы, которая описывается однородным дифференциальным уравнением x = A 1 ( t ) x ; матрица A 1 ( t ) имеет вид (19) , а матрица
T
W ( t,T ) = У Ф( t,т ) B 1 ( т )Ф * ( t,т ) dт t
удовлетворяет дифференциальному уравнению (17) и невырождена при выполнении условия управляемости (6).
Из интегральных уравнений (25), (26) непосредственно находим, что состояние системы (22) удовлетворяет граничному условию x ( T ) = 0 .
Результаты, полученные для поставленной задачи, сформулируем в виде теоремы.
Теорема. Для оптимальности пары ( x ( t ) , U (t )) Е А( t о ,T, x 0 ) в задаче (1)-(3), (5) необходимо и достаточно, чтобы:
-
1) x ( t ) удовлетворяла системе дифференциальных уравнений
ас = Ai(t)x - Bi(t)q + B(t)^(x,t), x(tо) = xо;(28)
= - Ai (t) q + W - 1( t, T) B (t) ^ (x, t), q (t о) = W -1 (t о, T) x (t о);(29)
-
2) управление й (t ) определялось по формуле
й( t) = u (x( t) ,t, x о ,t о ,T) = -R- 1( t) B* (t)(K (t):£( t) + q (t)) + ^ (:£( t) ,t),(30)
где матрица K ( t ) является решением уравнения (16) ; функция ^ ( x ,t ) имеет вид
^ ( x , t ) = — inf(0 , w ( x , t ) — a ( t )) + inf(0 , в ( t ) — w ( x , t )) ,
w(x, t) = -R- 1(t)B*(t)(K(t)x + q(t)).(31)
Доказательство. Необходимость следует из выражений (11)–(19). Для доказательства достаточности покажем оптимальность найденной допустимой пары ( x ( t ) , й (t )) , используя управление (11) и значение функционала (5). Значение функционала (5) имеет вид (24), в котором использованы решения дифференциальных уравнений (22), (23) и соотношения (20), (21).
Пусть ( x i ( t ) , u i ( t )) — произвольная допустимая пара, удовлетворяющая дифференциальному уравнению (1) с граничными условиями (2). Значение функционала (5) запишем в следующем виде:
J ( X 1 , U 1 ) = 2 x 0 к X о + x 0 q о
-
2 q * W ( t о ,T ) q o +
T
+1 [ 2( u i + R1 (t) в *(t)(к (t) x i + q)) *R (t)(u i + R- 1( t) b* (t)(к (t) x 1 + q))+ t0
+ ( x 1 - W ( t,T ) q ) * ( q + Л 1 ( t ) q ) ] dt. (32)
Учитывая, что x ( t ) = W ( t,T ) q ( t ) , t E [ t 0 ,T ] , получаем
J ( x 1 , U 1 ) =
2 x 0 ( K ( t о )+ W 1 ( t о ,T )) x о + 2
[ [(u 1 + R-1(t)B* (t)(K(t)+ t0
+ W - 1 ( t,T )) x 1 ) * R ( t )( u 1 + R - 1 ( t ) B * ( t )( K ( t ) + W - 1 ( t,T )) x 1 ) ] dt.
Используя значение функционала (24), (32), с учетом дифференциальных уравнений (28), (29), управления (30) и функции ^ ( x ,t ) (31) получаем
T
J ( x 1 , u 1 ) — J ( Ж , 'll
) = 2 / [ ( u 1 + R 1 ( t ) B * ( t )( K ( t ) + W - 1 ( t,T )) x 1 ) * R ( t )( u 1 +
t 0
+ R 1 ( t ) B* ( t )( K ( t ) + W 1 ( t,T )) x 1 ) — ф * ( ж ,t ) R ( t ) ф ( x , t ) ] dt > 0 .
Следовательно, J ( x , u ) = inf {J ( x , u ) , ( x , u ) E A( t о ,T, x o ) } .
Алгоритм решения задачи на ПК. Опишем удобный для реализации на ПК алгоритм решения задачи оптимального управления (1)–(5).
-
1. Используя метод Рунге — Кутты, проинтегрировать систему дифференциальных уравнений (16), (17) для определения матриц K ( t ) и W ( t,T ) в интервале [ t о ,T ] с условиями K ( t о ) = K о и W ( T,T ) = 0 .
-
2. Задать условия x ( 1 0 ) = x 0 , x ( T ) = 0 и вычислить q ( 1 0 ) = W - 1 ( 1 0 , T ) x ( 1 0 ) .
-
3. Используя метод Рунге — Кутты, проинтегрировать систему дифференциальных уравнений (28), (29) в интервале [ t о ,T ] , задав начальные условия x ( t о ) = x 0 , q ( t о ) = W - 1 ( t о ,T ) x ( t о ) . В процессе интегрирования системы (28), (29) необходимо выдать на печать график оптимальной траектории гё( t ) и оптимального управления u ( t ) . Если необходимо провести расчеты для новых значений x ( t о ) = x 0 , то повторить п.п. 2, 3.
Следует отметить, что K 0 — произвольная симметричная положительно-определенная матрица размерности nxn . При задании различных начальных условий K ( 1 0 ) = K 0 для матричного дифференциального уравнения (16) получаем различные матрицы K ( t ) и W ( t,T ) . Однако при этом получается одна и та же вектор-функция u ( t ) вида (30), поскольку задача имеет единственное решение. При вычислении вектор-функции q ( t ) по формуле (29) влияние матрицы K ( t ) компенсируется.
Пример. Рассмотрим задачу оптимального управления
T
J ( u ) =
2 У [ x 1 + 2 x 2 + u 2 ] dt ’
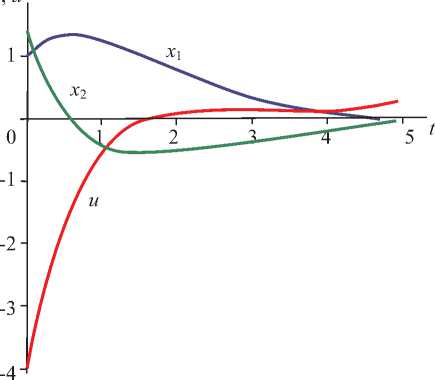
Рис. 1. График оптимального управления и оптимальных траекторий без ограничений на управления, соответствующий уравнениям (36)
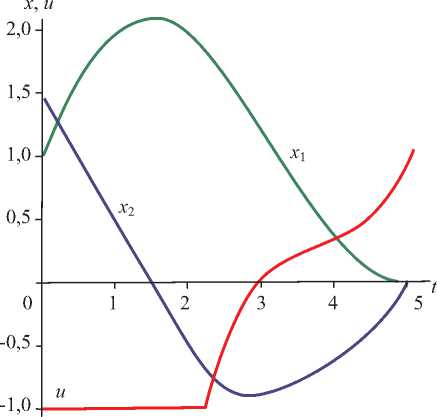
Рис. 2. График оптимального управления и оптимальных траекторий с учетом ограничений на управления, соответствующий уравнениям (37)
x 1 = x 2 , x 2 = u, x 1 (0) = 1 , x 2 (0)
2 , x 1 ( T ) = 0 , x 2 ( T ) = 0 , T = 5;
|u ( t ) | < 1 , t E [0 , 5] .
Решение задачи без ограничений на управления. Дифференциальные уравнения с управлением, определяющие закон движения системы (34) и доставляющие минимальное значение функционалу (33), представим в следующем виде:
xi = x2, x2 = —xi - 2x2 - q2, qi = q2, q2 = —q 1 + 2q2,
u — —x 1 — 2 x 2 — q 2 , K —
Решение задачи с ограничением на управления вида (35). Дифференциальные уравнения с управлением, определяющие закон движения системы (34) и доставляющие минимальное значение функционалу (33) , представим в следующем виде:
x 1 = x 2, x 2 = —x 1 — 2 x 2 — q 2 + у, q1 = q 2, <12 = —q 1 + 2 q 2 + W 1У, (37)
u = w(x, t) + у (x, t), w(x, t) = —x 1 — 2x2 — q2, у (x, t) = — inf(0,w(x, t) + 1) + inf(0, 1 — w(x, t)).
Расчеты проводились на ПК с использованием пакета прикладных программ Maple-7, в котором реализован изложенный выше алгоритм решения задачи оптимального управления (33)–(35). На рис. 1 приведены графики оптимальных траекторий движения системы и управления без ограничений, на рис. 2 — с учетом ограничений на управления.
Заключение. Предложен новый подход построения синтезирующего управления (30), основанного на принципе обратной связи, приводящем динамическую систему в требуемое состояние за конечное время при наличии ограничений на управления. Оптимальный закон движения рассматриваемой системы с заданными граничными условиями определен в виде (28), (29). Разработан алгоритм решения задачи оптимального управления на ПК. Этот алгоритм реализован на примере (33)–(35). Полученный результат позволяет построить функцию Беллмана — Кротова в следующем виде:
T
2 x ( к ( t ) + w 1
V ( x ,t )
( t, T )) x + I [j( A 1 ( x ,T ) - A 2 ( x ,T )) * R - 1 ( T )( A 1 ( x ,T ) - A 2 ( x ,T ))+
+ A i ( x ,t )( u - a ( т )) + A 2 ( х ,т )( в ( т ) - u ) ] dT.
Список литературы Оптимизация линейных систем с закрепленными концами траекторий и квадратичным функционалом при наличии ограничений
- 1. Красовский Н. Н., Летов А. М. К теории аналитического конструирования регулятора // Автоматика и телемеханика. 1962. Т. 23, № 6. С. 713-720. 2. Справочник по теории автоматического управления / Под ред. А. А. Красовского. М.: Наука, 1987. 712 с. 3. Брайсон А. Прикладная теория оптимального управления / А. Брайсон, Хо Ю-ши. М.: Мир, 1972. 544 с. 4. Атанс М. Оптимальное управление. Введение в теорию и приложения / М. Атанс, П. Фалб. М.: Машиностроение, 1968. 764 с. 5. Понтрягин Л. С. Математическая теория оптимальных процессов / Л. С. Понтрягин, В. Г. Болтянский, Р. В. Гамкрелидзе, Е. Ф. Мищенко. М.: Наука, 1976. 392 с. 6. Беллман Р. Динамическое программирование и современная теория управления / Р. Беллман, Р. Калаба. М.: Наука, 1968. 446 с. 7. Куржанский А. Б. Дифференциальные уравнения в задачах синтеза управлений // Дифференц. уравнения. 2005. Т. 41, № 1. С. 12-22. 8. Кротов В. Ф. Методы и задачи оптимального управления / В. Ф. Кротов, В. И. Гурман. М.: Наука, 1973. 446 с. 9. Мурзабеков З. Н. Синтез управляемых систем с ограничениями на управления // Изв. НАН РК. Сер. физ.-мат. 2005. № 3. С. 44-50.
