Оптимизация массы и энергопотребления лазерных локационных систем для управления сближением и стыковкой космических аппаратов

Автор: Зубов Николай Евгеньевич, Савчук Дмитрий Владимирович, Старовойтов Евгений Игоревич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Создание и эксплуатация космических автоматических аппаратов, комплексов и систем
Статья в выпуске: 3 (6), 2014 года.
Бесплатный доступ
Решена задача оптимизации энергопотребления и массы лазерной локационной системы (ЛЛС) для управления сближением и стыковкой космических аппаратов по критериям массы приемного объектива и мощности, потребляемой лазерными источниками, в качестве которых рассматривались твердотельные лазеры с диодной накачкой, что позволило определить суммарную потребляемую мощность и массу ЛЛС. В результате определены значения массы и потребляемой мощности, которые удовлетворяют требованиям для существующих аналогов ЛЛС.
Лазерная локационная система, космический аппарат, сближение и стыковка, парето-оптимизация, твердотельный лазер
Короткий адрес: https://sciup.org/14343449
IDR: 14343449 | УДК: 629.78.05:621.375.826
Optimization of the mass and power consumption of laser ranging systems to control the rendezvous and docking spacecraft
The authors solved the problem of optimization of power consumption and the mass of the onboard laser ranging systems (LRS) to control the rendezvous and docking spacecraft beyond Earth orbit, on the criteria of the mass the receiver objective and the power consumed by laser sources, as they were considered as solid-state diode-pumped lasers and optical parametric oscillator on the basis of a neodymium laser with diode pumping, which allowed to determine of total power consumption and weight of the LRS. As a result, with using of Pareto sets, found the values of weight and power consumption, which meet the requirements to the analogue of LRS, specified in literature.
Текст научной статьи Оптимизация массы и энергопотребления лазерных локационных систем для управления сближением и стыковкой космических аппаратов
Осуществление экспедиций на Луну и другие небесные тела пилотируемыми космическими аппаратами (КА) подразумевает сближение и стыковку взлетно-посадочного комплекса с орбитальным КА. Для управления этой операцией могут быть использованы бортовые лазерные приборы [1].
Преимущества лазерных локационных систем (ЛЛС) перед радиотехническими системами заключаются в меньшей массе и энергопотреблении. У известных ЛЛС максимальная измеряемая дальность равна 4 км, потребляемая мощность составляет 26…75 Вт, а масса 3,0…16,3 кг (табл. 1). Для сравнения: масса и потребляемая мощность комплекта радиотехнической системы «Курс» на активном КА составляют 93 кг и 240 Вт [2]. Меньшая масса ЛЛС позволяет снизить затраты топлива и увеличить массу полезного груза при полетах КА вне околоземной орбиты. Кроме того, у ЛЛС отсутствуют крупногабаритные раскладывающиеся антенны, которые должны помещаться под головным обтекателем ракеты-носителя и в случае нераскрытия могут создать трудности при стыковке КА.
ЛЛС определяют дальность до пассивного КА и скорость сближения с ним. Сравнительные характеристики бортовых ЛЛС, прошедших летные испытания на борту различных КА, представлены в табл. 1.
При разработке ЛЛС возникает необходимость получения наилучших значений самых разных показателей в пределах конструктивных ограничений. Поэтому для реализации аппаратуры необходимо решение задачи многокритериальной оптимизации.
Оптимизация параметров ЛЛС и уголковых отражателей для управления сближением КА по нескольким критериям рассмотрена в работах [8, 9]. В работе [10] при оптимизации параметров лазерного высотомера, предназначенного для управления спуском на поверхность Луны, были рассмотрены такие критерии, как потребляемая мощность и масса аппаратуры.
Таблица 1
Параметры бортовых лазерных локационных систем, прошедших летные испытания на борту КА
|
ЛЛС |
КА-носитель |
Дальность |
Потребляемая мощность, Вт |
Масса, кг |
|
VDM [3] |
ATV |
300 м |
26 (36)* |
7,6 |
|
RVS ( TGM ) [4] |
ATV , HTV |
1…730 м |
35 (61)* |
14,3 |
|
AVGS [5] |
ASTRO |
1…300 м |
33 |
16,3 |
|
RLS [6] |
XSS -1 |
2 м…3 км |
75 |
10 |
|
DragonEye [7] |
Dragon |
1 м…4 км |
30 |
3 |
Примечание . * — максимальное значение; ЛЛС — лазерная локационная система.
В указанных работах предложено использование метода поиска множеств Парето (Парето-оптимизация) для решения этих задач, и представлен соответствующий математический аппарат.
Целью данной работы является определение оптимальных характеристик для разработки перспективной ЛЛС, предназначенной для управления сближением и стыковкой КА, в части оптимизации массы и потребляемой мощности с использованием математического аппарата и характеристик лазеров, описанных в [10]. Рассматривается применение Nd:YAG -лазеров, параметрических генераторов света (ПГС) на их основе и эрбиевых лазеров.
Массовые и энергетические ограничения соответствуют ЛЛС, предназначенной для сближения и стыковки с возвращаемым модулем на орбите Марса: 7 кг и 45 Вт [1].
Методика оценки параметров ЛЛС
Если зондирующий пучок ЛЛС не перекрывает полностью весь объект, то энергетические соотношения описываются, как и в случае с лазерным высотомером, выражением [10, 11]:
D = Е л d в 2 х ρ п τ пер τ пр , (1)
4qE пор где Ел — энергия лазерного импульса; dвх — диаметр входного зрачка приемного объектива; q — отношение сигнал/шум; ρп — коэффициент отражения подстилающей поверхности планеты (альбедо); Епор — пороговая регистрируемая фотоприемником энергия принятого сигнала; τпер, τпр — коэффициенты пропускания передающего и приемного оптических трактов.
ЛЛС измеряет дальность до пассивного КА с площадью, равной S об = 3,14 м2 (мидель 2 м), и коэффициентом отражения поверхности ρ об = 0,5. Максимальная дальность измерений ЛЛС принята равной 5 км, что соответствует точностям предварительного выведения кооперируемых КА в случае, описанном в [1].
В работе [10] показано, что фоновая засветка от подстилающей поверхности планеты не снижает чувствительность фотоприемника (лавинного фотодиода).
При работе ЛЛС по точечному объекту возникает проблема наведения и удержания на нем зондирующего пучка, из-за чего используются относительно широкие диаграммы направленности излучения. Расходимость зондирующего пучка принимается равной γ = 6 мрад, т. е. на два порядка больше, чем в лазерном высотомере.
В выражении (1) предполагалось, что отражающая площадь объекта занимает все поле зрения, и энергия принятого сигнала равна
Еd 2 ρ τ τ л вх об пер пр , E п = 4 D 2
где Е л — энергия лазерного импульса; d вх — диаметр входного зрачка приемного объектива; ρ об — коэффициент отражения поверхности объекта; τ пер , τ пр — коэффициенты пропускания передающего и приемного оптических трактов; D — измеряемая дальность.
Если площадь пятна зондирующего пучка с расходимостью γ превосходит площадь подсвечиваемого объекта S об (симметричного относительно пучка)
πγ 2 D 2
4 ≥ Sоб, то энергия принятого сигнала зависит от отношения площади удаленного точечного объекта к площади поперечного сечения зондирующего пучка
E =
п
Е л S об d в 2 х ρ об τ пер τ пр ,
πγ 2 D 4
и дальность определяется выражением [11]
D = 4 л об вх ρ об τ пер τ пр , (3)
πγ2qE пор где q — отношение сигнал/шум; Епор — пороговая регистрируемая фотоприемником энергия принятого сигнала. В выражениях (2, 3) энергия импульса пропорциональна уже не второй, а четвертой степени дальности.
Отношение сигнал/шум составляет q = 10, пороговая энергия фотоприемного устройства Е пор = 10–16 Дж, потери в передающем и приемном оптическом тракте принимаются τ пер = τ пр = 0,7. Частота повторения зондирующих импульсов ЛЛС f = 10 Гц. Масса приемного объектива и энергопотребление лазерных источников ЛЛС определяются согласно [10]. Множества Парето для массы приемного объектива ЛЛС и энергопотребления Nd : YAG -лазера и ПГС на его основе представлены в виде кривых на рис. 1.
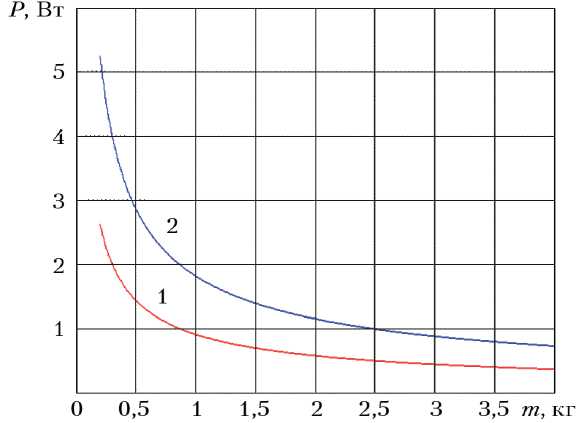
Рис. 1. Множества Парето для массы (m) приемного объектива лазерной локационной системы и энергопотребления Nd:YAG-лазера и параметрического генератора света на его основе (P): 1 — рабочая длина волны λ = 1,06 мкм; 2 — рабочая длина волны λ = 1,57 мкм
Принадлежность кривых к множеству Парето подтверждается методом обхода конусом. Массе приемного объектива 1 кг соответствует энергопотребление Nd:YAG -лазера около 1 Вт. При потребляемой мощности электроники 4 Вт суммарное энергопотребление равно 5 Вт. При КПД источника питания η п = 0,7 мощность, подводимая к ЛЛС, должна быть не менее 7,1 Вт.
Если Nd:YAG -лазер будет иметь массу около 0,5 кг, при массе объектива передающей оптической системы 0,5 кг, электроники — 3 кг, корпуса — 1 кг, суммарная масса ЛЛС составит 6 кг. В результате, ограничения не превышены.
При использовании ПГС на основе Nd:YAG -лазера в точке, соответствующей массе приемного объектива 1,5 кг, показатели ЛЛС составят 7 кг (при массе лазера 1 кг) и 7,9 Вт, что также соответствует ограничениям.
На рис. 2 представлено множество Парето для массы приемного объектива ЛЛС и энергопотребления эрбиевого лазера.
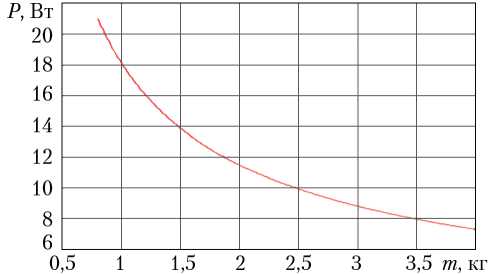
Рис. 2. Множество Парето для массы (m) приемного объектива лазерной локационной системы и энергопотребления эрбиевого лазера (P)
Массе приемного объектива 2 кг соответствует энергопотребление эрбиевого лазера около 11,5 Вт. Показатели ЛЛС при этом будут равны 7 кг (при массе лазера 0,5 кг) и 22,1 Вт, что не превышает ограничений.
Суммарная масса ЛЛС и потребляемая ею мощность при использовании различных лазерных источников представлены в табл. 2.
Таблица 2
Суммарные масса лазерной локационной системы и потребляемая ею мощность при использовании рассмотренных лазерных источников
|
Тип лазера |
Суммарная масса ЛЛС, кг |
Суммарная потребляемая мощность ЛЛС, Вт |
|
Nd:YAG -лазер |
6 |
7,1 |
|
ПГС на основе Nd:YAG -лазера |
7 |
7,9 |
|
Эрбиевый лазер |
7 |
22,1 |
Примечание. ЛЛС — лазерная локационная система; ПГС — параметрический генератор света.
Результаты исследований и их обсуждение
Для достижения наилучших показателей ЛЛС, предназначенной для управления сближением и стыковкой КА при заданных значениях дальности измерений и отношения сигнал/ шум, с использованием метода поиска множеств Парето решена задача оптимизации массы и потребляемой мощности аппаратуры.
Парето-оптимизация энергопотребления и массы ЛЛС по критериям массы приемного объектива и мощности, потребляемой лазерным источником, выполнялась для измеряемой дальности 5 км и нескольких видов твердотельных лазеров: Nd:YAG -лазера, ПГС на основе Nd:YAG -лазера и эрбиевого лазера.
В результате получены множества решений, из которых выбраны значения, не превышающие ограничений 7 кг по массе и 45 Вт по потребляемой мощности, что соответствует известным аналогам ЛЛС.
Список литературы Оптимизация массы и энергопотребления лазерных локационных систем для управления сближением и стыковкой космических аппаратов
- Pereira do Carmo J., Moebius B., Pfennigbauer M. Imaging LIDARs for Space Applications//Proc. of SPIE Vol. 7061 70610J-1. Режим доступа: www.sensl.com/downloads/irp/2008_doCarmo_Img_LIDAR_ Space_Apps.pdf (дата обращения 14.01.2012 г.).
- Оружие и технологии России. Т 5. Космические средства вооружения/Под общ. ред. Иванова С.Б. М.: ИД Оружие и технологии. 2002. 704 с.
- Videometer. Режим доступа: http://www. sodern.com/sites/docs_wsw/RUB_54/VDM.pdf (дата обращения 14.01.2012 г.).
- Michel K., Ullrich A. Scanning time-offlight laser sensor for rendezvous manoeuvres. Режим доступа: http://robotics.estec.esa.int/ASTRA/Astra2004/Papers/astra2004_S-02.pdf (дата обращения 14.01.2012 г.).
- Granade S.R., Roe F.D. Ground Testing the Hydra® AR&D Sensor System. Режим доступа: http://144.206.159.178/FT/CONF/16414843/16414863.pdf (дата обращения 20.01.2012 г.).
- Liadsky J. Recent Advancements in Commercial LIDAR Mapping and Imaging Systems. Режим доступа: http://www.nps.edu/Academics/Centers/RSC/documents/RecentAdvancements.pdf (дата обращения 26.01.2013 г.).
- 3D Flash LIDAR Cameras™ for OOS Applications. March 26, 2010. Режим доступа: http://ssco.gsfc.nasa.gov/workshop_2010/day3/Roger_Stettner/Stettner_ASC_Workshop_ Presentation.pdf (дата обращения 15.01.2012 г.).
- Старовойтов Е.И, Савчук Д.В. Парето-оптимизация параметров бортовых лазерных локационных систем космических аппаратов//Наука и образование (МГТУ им. Н.Э. Баумана). 2013. № 4. Электронное научно-техническое издание. Режим доступа: www.technomag.edu.ru/doc/574259.html (дата обращения 03.06.2013 г.).
- Старовойтов Е.И, Савчук Д.В. Исследование и оптимизация применения уголковых отражателей для локации космических объектов//Космическая техника и технологии. 2013. № 1. С. 38-43.
- Зубов Н.Е, Савчук Д.В, Старовойтов Е.И. Анализ возможностей и оптимизация массы и энергопотребления лазерного высотомера для управления спуском с окололунной орбиты//Космическая техника и технологии. 2014. № 1 (4). С. 67-74.
- Назаров В.Н., Балашов И.Ф. Энергетическая оценка импульсных лазерных дальномеров. СПбГУИТМО, 2002. 38 с. Режим доступа: http://de.ifmo.ru/bk_netra/start.php?bn=27 (дата обращения 19.01.2012 г.).
