Оптимизация новых типов электромеханических преобразователей в электротехнических комплексах

Автор: Бычков Антон Евгеньевич, Катаев Денис Ильдусович, Москов Тимур Талгатович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханика
Статья в выпуске: 15 (232), 2011 года.
Бесплатный доступ
Представлены результаты оптимизации электротехнического комплекса на примере синхронной реактивной машины независимого возбуждения с позиции минимума массы силовых элементов.
Электротехнический комплекс, синхронная реактивная машина независимого возбуждения, магнитодвижующая сила
Короткий адрес: https://sciup.org/147158130
IDR: 147158130 | УДК: 62-83-621.313.3
Optimization of new types of the electromechanical converters in the electric complexes
The results of optimization the electric complex are represented as an example of a synchronous reluctance separately excited machine from the perspective of minimum weight of load-bearing elements.
Текст научной статьи Оптимизация новых типов электромеханических преобразователей в электротехнических комплексах
Введение. Если при конструировании электроустановки обратить большее внимание на новые типы электрических машин и в комплексе «преобразователь - двигатель» проектировать не преобразователь под традиционный двигатель с синусоидальным напряжением на статоре, а попытаться учесть особенности совместной работы электрической машины с источником питания, то можно добиться хороших результатов. Особое место в этом ряду занимают синхронные реактивные машины с независимым возбуждением (СРМНВ), которые характеризуются крайней простотой конструкции, не содержащим обмоток ротором, высоким КПД, большими удельными и перегрузочными моментами [1,2, 5, 8].
В явнополюсной синхронной машине роль обмотки возбуждения может выполнить и обмотка, размещенная в пазах статора, если, во-первых, ее витки находятся напротив межполюсного промежутка ротора и, во-вторых, эта обмотка имеет полный шаг.
Так, если по обмоткам 1-Г и 2-2', расположенными над межполюсным промежутком (рис. 1), пропустить ток, то он создаст магнитодвижущую силу (МДС) Рй по продольной магнитной оси машины. Если теперь по обмоткам 33', 4-4', 5-5' и 6-6', расположенным над полюсами ротора, пропустить ток, то создается МДС реакции якоря РА .
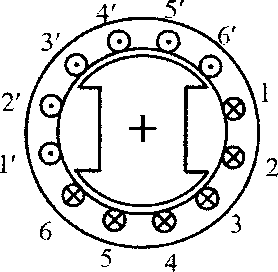
Рис. 1. Поперечный разрез СРМНВ
Токи /в в обмотках возбуждения, расположенных над межполюсными промежутками ротора, и токи /А в якорных обмотках, расположенных над полюсами ротора, могут регулироваться независимо и переключаться в функции положения ротора. По этим обмоткам нет необходимости пропускать синусоидальный ток.
Постановка задачи. Есть ряд научных работ, в которых оптимизируется элементы электротехнического комплекса «вентильный преобразова- тель - двигатель». В частности, в [7] предлагается оптимизация электромеханического преобразователя по критерию минимума электрических потерь, в [6] оптимизируются электромеханические преобразователи на базе синхронных реактивных машин за счет возбуждения машины основной и третьей гармониками. Однако предлагаемые решения ориентируются только на питание электрических машин от мостовых m-фазных инверторов с ограниченным числом фаз (максимальное значение - пять).
При увеличении числа фаз в электромеханическом преобразователе активные материалы (медь, железо) используются более оптимально, но при этом возрастают габариты вентильных преобразователей. Для ряда технологических объектов, работающих в интенсивных пускотормозных режимах (например, механизмы станов холодной прокатки труб), приходится увеличивать отношение M[J№ (где М — электромагнитный момент, УдВ - момент инерции двигателя), а это требует улучшать массогабаритные показатели электрической машины за счет увеличения габарита преобразователя частоты.
С другой стороны, в электроприводах городского электротранспорта необходимо оптимизировать по удельным показателям и вентильный и электромеханический преобразователь.
С учётом сказанного, представляет интерес рассмотрение задач оптимизации комплекса «Вентильный преобразователь - двигатель» для случаев питания электромеханического преобразователя: от стандартных трёхфазных автономных инверторов напряжения и от индивидуальных источников питания на каждую фазу. В первом случае (при питании от стандартных трёхфазных автономных инверторов) возможности по формированию формы фазных токов ограничиваются первым законом Кирхгофа. Во втором случае ограничения на форму фазных токов не накладываются.
Оптимизация электротехнического комплекса будет проводиться на примере синхронной реактивной машины независимого возбуждения.
Рассмотрим первый случай решения задачи. Когда обмотки СРМНВ питаются от двух трёхфазных автономных инверторов появляется возможность возбуждать электрическую машину дополнительно третьей гармоникой, тогда мгновенные значения фазных токов будут описываться системой уравнений:
Ц = V2 [Z| sin ф + 73 sin Зф];

/] sin ф— +/3 sin3 ф— ; V 6 7(67
/, sin ф— + Л sin3 ф— ;
V 3) (3;
2 7, sin ф—- +71 sin 3 ф— ;
z5 _
г- ( 2л i (2л 1
2 7, sin ф—- + 73sin3 ф- ;
I 3 / I3 7
5л) . . (5л
— + 7, sin3 ф--
6 J (6
где /т, /3 - действующее значение первой и третьей гармоник тока соответственно; ср - угол, отсчитываемый вдоль расточки статора.
Линейная плотность поверхностного тока
2mpNnl А =----—, кВ где т - число фаз; р - число пар полюсов; Nр - число витков на полюс и фазу; D - внутренний диаметр статора; I - действующее значение фазного тока.
МДС, создаваемая первой гармоникой тока,
-
1 Р ‘
Третья гармоника тока будет создавать МДС
Г-1 — ,
-
3 ЗР
Результирующая МДС в воздушном зазоре
F = Fs sin ф - F3 sin Зф.
Взаимосвязь между МДС и индукцией в зазоре
B = — F, ga где ga - магнитная проводимость зазора, ц0 - маг нитная постоянная.
Для того чтобы определить момент, создаваемый электрической машиной, необходимо найти производную коэнергии в функции угла поворота вала двигателя [3, 4]. В линейной магнитной системе коэнергия равна энергии магнитного поля. С учётом сказанного выражение для электромагнитного момента будет записано в виде [7]
М =

cos^ip + 2a)-cos(ip -2a
+F^3 [cos (2тр + 4°) _ cos^2rp - 4a) 1 +
+“-^cos^3rp + 6a)-cos(3rp ~6a)j.
В выражении для момента: a - угол нагрузки СРМНВ; тр - полюсная дуга.
Варьируя параметры а, тр можно определить, когда достигается максимум электромагнитного момента.
На рис. 2 представлены результаты оптимизации.
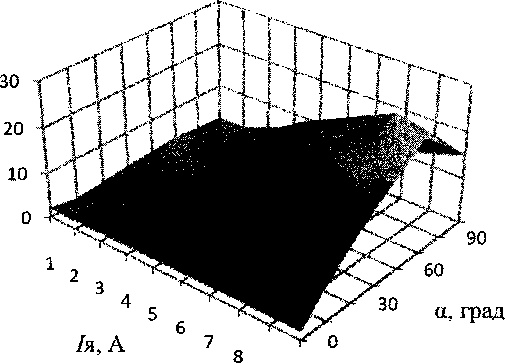
Рис. 2. Результат оптимизации СРМНВ при питании его от двух трёхфазных автономных инверторов
Рассмотрим второй случай решения задачи. Во втором случае форма тока может быть произвольной. В [2] показано, что в СРМНВ с бесконечным числом фаз оптимальной кривой линейной плотности поверхностного тока является график прямоугольной формы. При учёте конечного числа фаз появляются пульсации электромагнитного момента, которые снижают удельные показатели электротехнического комплекса. Учтём влияние конечного числа фаз на величину электромагнитного момента. Для этого найдём зависимость момента, развиваемого двигателем, от угла нагрузки.
В линейной системе для ротора круглого сечения зависимость между МДС и индукцией в зазоре имеет треугольную форму. Выражение индукции в функции угла ф будет иметь вид (за начало отсчёта принимается угол, совпадающий с осью МДС (рис. 3 а, б)): для углов -л < ф < О в = ^в(^+Л
действующее на ту часть ротора, которая расположена под якорными токами, направленными, как показано на рис. 3, а, г, «к нам». Вторая составляющая электромагнитного усилия, создаваемая оставшейся частью поверхностного тока, направлена навстречу первому. Тогда для всех
л л углов -а5 —<а<а5 —
электромагнитный момент
будет определяться как результат действия двух указанных составляющих распределённых сил м = м+-м_.
а) ©000ЭО0Ж№
2 (л 1 л у
Абсолютное значение линейной плотности поверхностного тока вдоль расточки статора описывается уравнением А = Ат (рис. 3, в). Электромагнитный момент для углов а (рассогласования между осью МДС и осью ротора,
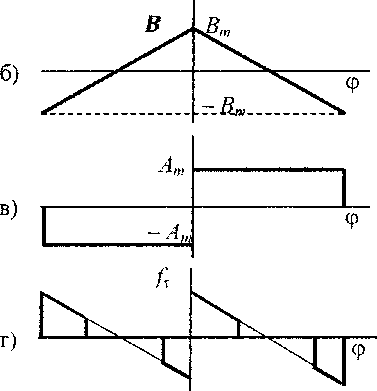
рис. 3, д) меньших значений,
половине полюсного деления
представить как результат
соответствующих л
—, можно 6 2
действия двух

Рис. 3. Расчетные кривые, поясняющие определение угловой характеристики СРМНВ
составляющих распределённых сил, одна из которых создаёт положительный электромагнитный момент (направленный по часовой стрелке) - усилие,
Момент, создаваемый электромагнитными силами, направленными в отрицательном направлении, можно вычислить, если учесть, что в данном диапазоне изменения углов а индукция в зазоре линейно нарастает, а явнополюсность ротора учитывается выбором пределов интегрирования:
М_ =
/5л2-Г-+ J л <2 )
Amd^ =
= 2/^2^^^) о л (2 2) -
= Л1^АтВт
Л
Аналогичным образом определим составляющую М+ :
™л+а
2 2 А
М+= {
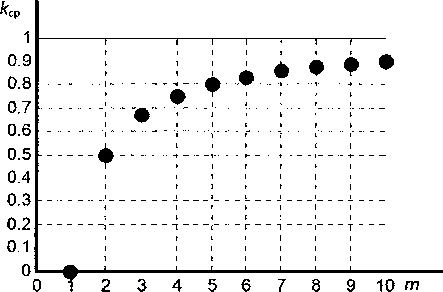
i6R2—B\—- md --lsR2AmBm Тогда результирующая величина электромагнитного момента М = м+ -М_ = 2lbR2AmBXX-^Y тт а5 71 - Для углов а>-^~ электромагнитным момент может быть получен без разделения интеграла на части, так как величина индукции в данном случае представлена одним аналитическим выражением ™я+а 2 2 м = м+ = lbR2 J —Вт --Ф ^dtp = = ЦВ1АтВти^-И (**) Анализ выражений (*), (**) показывает, что угол ап№ , соответствующий максимальному значению электромагнитного момента на угловой характеристике, зависит от величины полюсного деления. Физическое объяснение полученного результата состоит в том, что в отличие от обычного синхронного реактивного двигателя, в котором поверхностный ток, находящийся под полюсами, изменяется по синусоидальному закону, в СРМНВ он остаётся постоянным. Влияние числа фаз на характеристики электропривода с СРМНВ рассматривалось в [1]. На рис. 4 представлена зависимость коэффициента пульсаций Лср электромагнитного момента от числа фаз. Увеличение w до 10 существенно снижает пульсации мгновенного значения момента. Дальнейшее увеличение числа фаз приводит к значительному увеличению числа ключей: так при ин- дивидуальных источниках питания на фазу это число равно 4т; при питании же машины от стандартных мостовых инверторов - 2т. В нашем случае мы остановились на варианте машины с числом фаз равным шести. Рис. 4. Зависимость коэффициента пульсаций от числа фаз СРМНВ Обсуждение результатов. В первом случае при питании СРМНВ от стандартных трёхфазных инверторов напряжения за счёт возбуждения машины основной и третьей гармониками удаётся улучшить массогабаритные показатели. В частности, в линейной магнитной системе момент двигателя при той же линейной нагрузке улучшается на 15 %. При учёте насыщения удельные показатели более скромные (выше на 10 %). Во втором случае при фазности электрической машины, равной 10, удаётся увеличить удельные показатели электрической машины на 30 %. Но указанные показатели достигаются при относительно большом числе ключей (40 вентилей для 10 фаз). В некоторых случаях такое увеличение вентилей оказывается вполне оправданным. Так, например, для механизмов, требующих высокого быстродействия, габариты и стоимость вентильных преобразователей не играют существенной роли при выборе системы электропривода. Другой пример: в электроприводах большой мощности схемы силовых цепей, как правило, выполняют индивидуально. Более того, увеличение фазности преобразователя и уменьшение мощности отдельной фазы улучшает надёжностные показатели электропривода, а в некоторых случаях может снизить габарит преобразователя частоты. Полученные результаты позволяют определить область применения электротехнических комплексов на базе соответствующих схем силовых цепей. Так, если требуется оптимизировать геометрические размеры электрической машины, то можно воспользоваться результатами оптимизации электропривода при возбуждении от основной и третьей гармоник (рис. 2). При выборе оптимального числа фаз приходится учитывать зависимость коэффициента пульсаций (см. рис. 4) и габаритные параметры вентильных преобразова- телей, которые при индивидуальном исполнении, будут зависеть от числа фаз.
Список литературы Оптимизация новых типов электромеханических преобразователей в электротехнических комплексах
- Григорьев, М.А. Линейная плотность поверхностного тока в энергосберегающих электроприводах с синхронной реактивной машиной независимого возбуждения/М.А. Григорьев, А.Е. Бычков//Вестник ЮУрГУ. Серия «Энергетика». -2010. -Вып. 14. -№ 32(208). -С. 46-51.
- Григорьев, М.А. Предельные возможности электроприводов с синхронной реактивной машиной независимого возбуждения/М.А. Григорьев//Вестник ЮУрГУ. Серия «Энергетика». -2009. -Вып. 12. -№ 34(167). -С. 51-55.
- Иванов-Смоленский, A.B. Электромагнитные силы и преобразование энергии в электромеханических машинах: в 2 т./A.B. Иванов-Смоленский. -3-е изд., перераб. и доп. -М.: Изд-во МЭИ, 2006. -652 с.
- Копылов, И.П. Справочник по электрическим машинами: в 2 т./И.П. Копылов, Б.К. Клоков. -М.: Энергоатомиздат, 1988. -Т. 1 -456 с.
- Усынин, Ю.С. Электроприводы и генераторы с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, K.M. Виноградов//Электричество. -№ 3. -2007. -С. 21-26.
- Law, J. Magnetic Circuit Modeling of the Field Regulated Reluctance Machine, Part I: Model Development/J. Law, T. Busch, T. Lipo//IEEE Transaction on Energy Conversion. -2000. -№ 1. -Vol. 11. -P. 49-56.
- Toliyat, H. Analysis and Simulation of Five Phase Synchronous Reluctance Machines Including Third Harmonic of Air-Gap MMF/H. Toliat, S. Waikar, T. Lipo//IEEE Transactions on Industry Applications. -March/April 1998. -Vol. 34. -№ 2. -P. 332-339.
- Vagati, A. Advanced Motor Technologies: Synchronous Motors and Drives/A. Vagati//IEEE Transactions on Industry Applications. -1998. -P. 223-227.
