Оптимизация параметров конструкции бионического плавающего робота для мониторинга природных и техногенных объектов в гидросфере

Автор: Лушников Б.В., Яцун С.Ф., Политов Е.Н., Тарасова Е.С.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Биотехнологии и биоинженерия
Статья в выпуске: 4-4 т.13, 2011 года.
Бесплатный доступ
Представлены принципы и результаты оптимизации конструкции автономного подводного робота с бионическими принципами движения, предназначенного для мониторинга природных и техногенных объектов в гидросфере.
Подводные плавающие роботы, бионические принципы движения, параметрическая оптимизация
Короткий адрес: https://sciup.org/148200277
IDR: 148200277 | УДК: 532.3
Parameters optimization of bionic floating robot construction for monitoring the natural and technogenic objects in hydrosphere
Principles and results of optimization the construction of autonomous underwater robot with bionic principles of the movement intended for monitoring the natural and technogenic objects in hydrosphere are presented.
Текст научной статьи Оптимизация параметров конструкции бионического плавающего робота для мониторинга природных и техногенных объектов в гидросфере
Мониторинг состояния гидросферы является частью общей системы наблюдений за окружающей природной средой. В настоящее время во всем мире ведется активная разработка различных роботизированных устройств, способных решать задачи исследования водных объектов, такие как:
-
• разведка недр мирового океана и поиск полезных ископаемых;
-
• мониторинг загрязнения вод и их очистка;
-
• поисковые и спасательные работы;
-
• проверка состояния подводных трубо-и топливопроводов;
-
• океанографические исследования (изучение морских течений, миграции морских животных, учёт их ареала и популяции и т.п.);
-
• обследование и подъем затонувших объектов;
-
• морская археология.
При этом комплексность научных исследований водных объектов требует определения множества физических и химических параметров, таких как температура воды, скорость и направление течения, химический состав воды, а также определения местоположения подводных объектов (подвижных и неподвижных). Обработка данной информации может осуществляться
Яцун Сергей Федорович, доктор технических наук, профессор, заведующий кафедрой теоретической механики и мехатроники
Политов Евгений Николаевич, кандидат технических наук, доцент кафедры теоретической механики и мехатроники
Тарасова Елена Сергеевна, аспирантка на стационарных пунктах мониторинга, но сбор подобной информации – задача именно подвижных подводных аппаратов. В данной статье представлено описание конструкции и методики оптимизации параметров опытного образца робота-рыбы, математическая модель которой предложена в [1]. Опытный образец предназначен для экспериментальной проверки предложенной конструкции робота и средств его управления в условиях натурных испытаний в водной среде.
Описание конструкции бионического плавающего робота. В соответствии с принятой и рассмотренной в [1] трехзвенной кинематической схемой (рис. 1) плавающего робота, основанного на бионических принципах движения, в конструкции робота необходимо предусмотреть следующие основные приводы и подсистемы: привод хвостового плавника; привод предхвостия; подсистему динамического погружения и всплытия с приводом боковых плавников; подсистему вертикального погружения и всплытия; подсистему видеонаблюдения; подсистему освещения; подсистему электропитания; подсистему навигации.
Хвостовой плавник и предхвостие приводятся в движение кривошипно-коромысловыми механизмами, в которых вращение кривошипов обеспечивается сервоприводом фирмы Parallax серии Standard Servo (#900-00005). Данные электроприводы оснащены встроенной системой автоматического управления, обеспечивающей точное позиционирование угла поворота вала в пределах от 0º до 180º или непрерывное вращение с заданной скоростью. В подсистеме динамического погружения и всплытия также используется сервопривод модели Standard Servo (#900-00005) для задания необходимого угла поворота парных боковых плавников в диапазоне от нуля до 180 градусов. Это позволяет изменять направление движения робота в вертикальной плоскости, то есть осуществлять погружение (всплытие) за счет движения хвостового плавника. Такое погружение или всплытие робота будем считать динамическим.
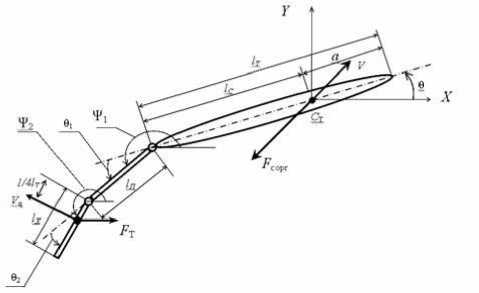
Рис. 1. Расчетная схема бионического плавающего робота в горизонтальной плоскости: X-Y – прямоугольная абсолютная система координат; l T – длина «тела» робота; l П – длина хвостового стебля; l Х – длина хвостового плавника; V – вектор абсолютной скорости центра масс С Т ; V q – вектор линейной скорости точки хвостового плавника, отстоящей на расстоянии ¼ его длины от оси вращения; θ – угловая координата центральной продольной осевой линии тела робота; θ 1 и θ 2 –относительные углы поворота хвостового стебля и хвостового плавника соответственно вокруг своих осей вращения; ψ 1 и ψ 2 – абсолютные угловые координаты положения хвостового стебля и хвостового плавника соответственно.
Кроме того, предусмотрена система вертикального погружения (всплытия), необходимость которой продиктована возможной потребностью мониторинга вертикальных объектов в гидросфере (опорных колонн, свай, подводных бортов кораблей и т.д.), а также возможными ограничениями водного пространства. Подсистема вертикального погружения (всплытия) представляет собой гидроцилиндр с приводом линейного движения для приема или вытеснения забортной воды, что позволит управлять величиной архимедовой силы. Подсистема автономного электропитания включает основную аккумуляторную батарею, рассчитанную на бесперебойную работу всех приводов в штатном режиме (не менее 30 мин.), а также аварийную аккумуляторную батарею, необходимую для аварийного всплытия робота-рыбы.
Первые испытания изготовленного опытного образца робота-рыбы (рис. 2) с дистанционным управлением показали, что он может перемещаться в водной среде на расстояние до 150 м. Данное устройство позволяет исследовать влияние параметров конструкции (площади и длины хвоста, частоты и амплитуды колебаний хвоста) на динамические характеристики мобильного робота (скорость плавания, маневренность и т.д.), а также обеспечит возможность других экспериментальных натурных исследований.

Рис. 2. Фото испытания опытного образца бионического плавающего робота
Оптимизация параметров бионического плавающего робота. В качестве основных параметров, определяющих эффективность движения робота в горизонтальной плоскости, будем рассматривать следующие: ω 2 – частота угловых колебаний хвостового плавника; θ 2 – амплитуда угловых колебаний хвостового плавника; S – площадь боковой поверхности хвостового плавника; l х – условная длина хвостового плавника; M – масса тела робота-рыбы. Оценку функциональных возможностей движения плавающего бионического робота будем производить по следующим характеристикам:
-
- V – скорость плавания – скорость прямолинейного движения робота вдоль его основной оси симметрии. Определяет эффективность транспортировки средств мониторинга окружающего подводного пространства в горизонтальной плоскости;
-
- Y – боковое смещение центра масс робота. Определяет непостоянство направления средств мониторинга окружающего пространства;
-
- θ – угловое «виляние» тела робота относительно вертикальной оси, проходящей через его центр тяжести. Определяет нестабильность направления оптической оси аппаратуры
видеонаблюдения и углового обзора исследуемого подводного пространства;
-
- μ= R /( lх + l П + l t ) – коэффициент маневренности в горизонтальной плоскости, где R – радиус кривизны траектории поворота робота на 180 градусов, ( lх + l П + l t ) - общая длина робота. Определяет пространство для разворота робота в горизонтальной плоскости.
Для решения задач оптимизации используется стандартный план Рехтшафнера [2], на основании которого была составлена универсальная программа расчёта в среде MathCAD «Оптимальное планирование эксперимента» [3]. В качестве критериев оптимизации рассматриваемого устройства примем скорость плавания V и угол θ «виляния» корпуса робота относительно вертикальной оси, проходящей через центр тяжести робота. Причем первый из них необходимо получать наибольшим, а второй – наименьшим из возможных значений с учетом определенных ограничений, накладываемых на управляемые параметры системы. Тогда комплексный критерий оптимизации (целевая функция) может быть представлена в следующем виде:
K = k 1 V + k 2 /θ →max, (1)
где k 1 и k 2 – «весовые» коэффициенты, корректирующие вклад каждого из критериев качества в комплексный критерий оптимизации. С учетом диапазонов изменения критериев V и θ примем значения k 1 =10; k 2 =400 так, чтобы вклад каждого из составляющих критерия был одного порядка.
В результате предварительного исследования движения плавающего робота в горизонтальной плоскости установлены наиболее значимые параметры его модели, существенно влияющие на кинематические характеристики и функциональные возможности. Для оптимизации параметров конструкции разрабатываемого робота по принятой целевой функции (1) в качестве варьируемых факторов были приняты: X 1 – частота колебаний хвостового плавника ω ; X 2 – амплитуда угловых колебаний хвостового плавника θ 2 ; X 3 – площадь боковой поверхности хвостового плавника S ; X 4 – длина хвостового плавника lx . Интервалы изменения варьируемых факторов и значения их трёх уровней представлены в таблице 1.
Таблица 1 . Интервалы и уровни изменения варьируемых факторов
|
Факторы |
Уровни |
Интервал варьирования |
Размерность |
||
|
-1 |
0 |
+1 |
|||
|
X 1 |
2 |
4 |
6 |
2...6 |
рад/c |
|
X 2 |
10 |
20 |
30 |
10...30 |
градусы |
|
X 3 |
0,01 |
0,02 |
0,03 |
0,01...0,03 |
м2 |
|
X 4 |
0,10 |
0,15 |
0,20 |
0,1...0,2 |
м |
Остальные параметры модели робота были приняты постоянными: M=2 кг; l п=0.1 м, lt =0.3 м ; J =0.04 кг м2. Расчёт коэффициентов аппроксимации функции отклика полным полиномом второго порядка (регрессионный анализ) дал следующие результаты:
K( X )=9,0 + 8,93 X 1 – 2,0 X 2 – 2,62 X 3 + 8,64 X 4 + + 6,61 X 1 2 – 1,31 X 2 2+3,54 X 3 2 – 5,11 X 4 2–
– 4,83 X 1 X 2 ++ 4,13 X 1 X 3 +5,08 X 1 X 4 + 1,87 X 2 X 3 –
–7,26 X 2 X 4 + 4,39 X 3 X 4 (2)
Поиск максимума функции (2) в пятимерном пространстве выполнен методом половинного деления шага по каждой переменной и позволил определить значение вектора варьируемых факторов в нормированном виде X =( X 1, X 2, X 3, X 4), соответствующее точке максимума: X опт= (1, -1, 1, 1). В размерном виде этой точке соответствуют значения:
-
X 1 =1 – частота колебаний хвостового плавника ω опт =6 рад/с;
X 2= –1 – амплитуда угловых колебаний хвостового плавника θ 2опт = 100;
X 3 =1 – площадь боковой поверхности хвостового плавника S опт =0,03 м2;
X 4 =1 – длина хвостового плавника lt опт =0,2 м.
Определенным таким образом оптимальным значениям параметров модели робота соответствуют следующие кинематические характеристики его движения в горизонтальной плоскости: Vопт=0,214 м/с; θопт = 4,00. Анализ полученных результатов свидетельствует о том, что при найденном оптимальном соотношении параметров модели робота можно достичь достаточно высокой скорости плавания (Vопт=0,214 м/с) бионического робота-рыбы при малом (θопт = 4,00) «вилянии» его корпуса относительно вертикальной оси, что является важным при проведении видеомониторинга окружающего водного пространства, а также природных и техногенных объектов, находящихся в нем.
Выводы: в работе рассмотрены и приняты к использованию принципы оптимального планирования экспериментальных исследований, с их учетом были составлены методика и программа натурных испытаний разрабатываемого опытного образца бионического плавающего робота. Для целей оптимизации параметров конструкции робота и управляющих сигналов были выбраны варьируемые факторы, наиболее значимые и существенно влияющие на функциональные возможности и характеристики движения. В результате предварительных исследований был сформирован комплексный критерий оптимизации для целевой функции, учитывающий скоростные качества движения робота и стабильность положения тела робота, что является важным при проведении видеомониторинга окружающего водного пространства, а также природных и техногенных объектов, находящихся в нем.
Работа выполнена в рамках реализации Федеральной целевой программы «Научные и научнопедагогические кадры инновационной России» на 2009-2013 годы по проблеме «Разработка бионического плавающего робота для мониторинга природных и техногенных объектов в гидросфере» (гос. контракт № П971) .
Список литературы Оптимизация параметров конструкции бионического плавающего робота для мониторинга природных и техногенных объектов в гидросфере
- Лушников, Б.В. Компьютерное моделирование динамики бионического плавающего робота/Б.В. Лушников, С.Ф. Яцун, Е.Н. Политов, Е.С. Тарасова//Известия Самарского научного центра Российской академии наук. 2010. Т. 12, №4(3). С.562-567.
- Голикова, Т.М. Каталог планов второго порядка (вып. 47)/Т.М. Голикова, Л.А. Панченко, М.3. Фридман. -М.: Изд.-во МГУ, 1974. 387 с.
- Свидетельство о государственной регистрации программы для ЭВМ №2009611961 «Оптимальное планирование эксперимента»/С.Ф. Яцун, Б.В. Лушников, Ю.А. Гапонов. №2009610715; заявлено 24.02.09; зарегистрировано 17.04.09.
