Оптимизация параметров механизма подъёма капота косилки с применением газовых пружин

Автор: Джасов Дмитрий Викторович, Иванов Дмитрий Николаевич, Шантыко Александр Степанович
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Технологии, средства механизации и энергетическое оборудование
Статья в выпуске: 2 (42), 2018 года.
Бесплатный доступ
В работе рассматривается один из методов проектирования и оптимизации механизмов подъема на примере капота косилки самоходной на гусеничном ходу, выпускаемой ОАО «Гомсельмаш». Рассматривается механизм подъема капота с использованием газовых пружин. Такие механизмы, в процессе эксплуатации или обслуживания машин механизатором, позволяют снизить усилие на рукоятке при переводе его из одного положения в другое до комфортной величины. Для этого создана математическая модель рычажного механизма, выполненная с использованием векторного способа описания рычажных механизмов, выполнен силовой анализ и расчет характеристики открывания. При формировании характеристики изменения уравновешивающей силы на рукоятке капота учтена реальная сила на газовой пружине с учетом гистерезиса. Предложены критерии подбора параметров механизма открывания, использование которых обеспечивает оптимальное проектирование. По результатам исследования выявлено, что жесткость самого капота и мест установки пружины на раме оказывает большое влияние на характеристику изменения уравновешивающей силы на рукоятке капота кроме сил трения и гистерезиса самой пружины. В пределах упругой деформации элементов крепления газовых пружин происходит изменение плеча силы действия газовой пружины. В случае установки газовых пружин с использованием малых плеч это приводит к значительному изменению конечной характеристики изменения силы на рукоятке. Увеличение жесткости элементов конструкции не всегда рационально, так как ведет к увеличению материалоемкости изделия. В связи с вышесказанным на этапе проектирования предлагается оценивать влияние жесткости конструкции капота и элементов крепления газовых пружин на расчетную характеристику уравновешивания и при необходимости корректировать расположение газовых пружин с учетом деформаций всей конструкции.
Капот, механизм открывания, газовая пружина, результирующая сила, жесткость, критерии подбора
Короткий адрес: https://sciup.org/140234267
IDR: 140234267 | УДК: 631.35
Текст научной статьи Оптимизация параметров механизма подъёма капота косилки с применением газовых пружин
Введение. На сельскохозяйственных машинах в качестве механизма подъема/откры-вания капотов широкое применение получили механизмы с использованием газовых пружин. Такие механизмы в процессе эксплуатации или обслуживания машин механизатором при подъ-еме/опускании капота позволяют снизить усилие на рукоятке, которое необходимо приложить механизатору при переводе из одного положения в другое, до комфортной величины.
Благодаря компактности и наличию широкого типоразмерного ряда выпускаемых газовых пружин, позволяющих использовать их для большой вариации поднимаемых масс, эти механизмы широко используются в конструкциях. Однако у этих механизмов имеются особенности, которые необходимо учитывать при их проектировании.
Для осуществления направлений оптимизации конструкции механизма подъема капота необходимо провести кинематический, силовой анализ, а также сформировать требуемую характеристику открывания. Рассмотрим методы проектирования и оптимизации подобных механизмов на примере капотов косилки самоходной на гусеничном ходу для уборки риса КСР-150 производства ОАО «Гомсельмаш».
Методика исследований. Основой для составления математической модели механизма открывания капота является векторный метод описания рычажных механизмов, широко описанный в литературе [1–3]. Основой данного метода является система аналитического преобразования координат исходного вектора в вектор, который может быть получен из исходного, путем поворота его на некоторый угол в заданном направлении в рассматриваемой плоскости [4–7].
Расчетная схема исследуемого механизма уравновешивания капота косилки самоходной показана на рисунке 1.
Рисунок 1 – Расчетная схема механизма
В качестве исходных данных для описания кинематики механизма выступают координаты неподвижных точек О(OX;OY) и А(AX;AY), длины звеньев LOB, LOG, LOP, углы между отрезками на жестких звеньях BOG и BOP. Для описания кинематики также необходимо задаться длиной выбранной газовой пружины в сжатом состоянии LAB min и ее полным ходом h max .
За обобщенную координату при описании кинематики механизма примем ход h газовой пружины с изменением его в пределах от минимального хода hmin, обеспечивающего наличие зазора до полного смыкания газовой пружины в закрытом состоянии капота, до максимального хода газовой пружины по каталогу изготовителя hmax. Минимальный зазор hmin до полного смыкания газовой пружины необходим для обеспечения гарантированного закрытия капота с учетом допусков на изготовление и отсутствия кинематического нагружения элементов конструкции.
Положение всех точек капота при его переводе в верхнее положение будет описываться следующими зависимостями:
т 111111 .7 /л\
^АВ "+" ^ ’ (1)
OA A O ;
С учетом выражений (1)–(3) относительное и абсолютное положение точки В и положение пружины АВ опишется выражениями (4)–(6).
|
OB ( h ) = Turn Vl„„, (Oa, AOB ( h ), L 0B ) , |
(4) |
|
где TurnV Lnew – функция поворота вектора [5], |
|
|
B ( h ) = 0+OB ( h) ; |
(5) |
|
AB ( h ) = A+AB; h ) . |
(6) |
Аналогичным путем выражения (7)–(10) описывают положение центра тяжести капота G и рукоятки Р .
л
OG ( h ) = Turn V L „„ (OB, BOG ( h ), L og ) ; (7)
G(h ) = O+OG(h);(8)
OP(h) = Turn VL!„ (OB, BOP(h), Lop );(9)
P(h ) = O+OP(h ).(10)
В результате проведенной оптимизации механизма должна быть получена характеристика изменения усилия на рукоятке, соответствующая следующим требованиям:
– в поднятом состоянии капота газовая пружина должна удерживать его и исключать возможность самопроизвольного опускания, что регламентировано ГОСТ 12.2.019-2015;
– в нижнем положении капот должен прижиматься к нижнему ограничителю для фикса- ции его замком или, при отсутствии последнего, исключения его самооткрывания;
– во всем диапазоне подъема/опускания усилие на рукоятке не должно превышать предельно допустимой величины.
Согласно ГОСТ 12.2.120-2015 сила сопротивления для элементов управления рукой не должна превышать 150 Н. Принято, что наиболее комфортным для механизатора является усилие, потребное для перевода капота из одного положения в другое, не превышающее 100 Н.
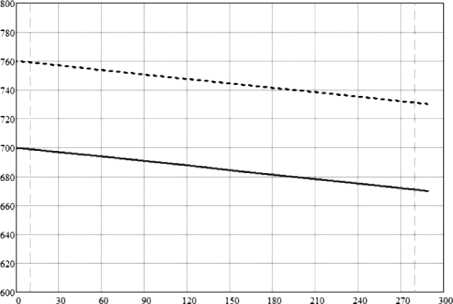
Рисунок 2 – Характеристика газовой пружины
Часто при проведении инженерных рас- вой пружине постоянной. На самом деле эта четов для упрощения принимают силу на газо- сила увеличивается при сжатии, уменьшается при растяжении и, кроме того, газовая пружина обладает гистерезисом, обусловленным силой трения.
Для уравновешивания капота предпола-
Fг = ±30 Н. В общем виде характеристика газовой пружины показана на рисунке 2.
Силовые параметры газовой пружины характеризуются силами в ее коротком и длинном
гается использовать пневмопружину 1163080010-15 из каталога завода-изготовителя ОАО «Белкард» с рабочим усилием Fн=700 Н. При этом сила трения FТР составляет не более 60 Н, а изменение силы при выдвижении/сжатии
состоянии при движении в сторону сжатия и растяжения. С учетом этих параметров сила на пружине при растяжении в каждом положении может быть описана выражением (11), при сжатии – выражением (12).
FPr eepx ( Һ ) = Ғн^
( L max -L ( Һ ))• ҒГ
h max
F :
ТР ;
Fpr„ , ( h ) = Ғн + (L "" L ( h ))- Ғ г + Ftp • h max
где Fн – номинальная сила, реализуемая газовой пружиной;
Fг, F ТР – гистерезис и сила трения в газовой пружине;
L max , h max – максимальная длина и ход газовой пружины;
L(h) – текущая длина пружины при открыва-нии/закрывании капота.
Тогда, зная силу, развиваемую пружиной
при сжатии и растяжении, определяем уравно-
вешивающую силу на рукоятке – при движении капота вверх выражением (13) и при движении капота вниз выражением (14).
FP верх (Һ ) =
M G ( h )~ MPr eepx ( h )
FP низ ( h ) =
L OP
M g ( h )- MprHU3 ( h )
;
LOP
где Mg ( h ) - момент силы тяжести вокруг точки поворота капота определяется выражением (15):
Mg ( h ) = MgOG x ( h ) , (15):
где Mg – вес капота;
OGx – плечо силы тяжести;
Мрг верх ( h ) , MprHU3 ( h ) - момент от силы
пружины вокруг оси поворота капота при движении вверх и вниз определяется выражениями (16) и (17) соответственно:
MPr eepx ( h ) = FPr eepx ( h ) • z"h _ Pr ( h ) ; (16)
МРГ низ ( h ) = FPr HU3 ( h )• z'h _ Pr ( h ) - (17)
где z – количество устанавливаемых пружин;
h _ Pr(h) - плечо пружины вокруг оси поворота капота определим из выражения (18) как векторное произведение векторов, h _ Pr(h) = (OB(h) X ort(AB(h)))z. (18)
В качестве положительного направления уравновешивающей силы на рукоятке в выражениях (13) и (14) принято направление, совпадающее с направлением перемещения точки Р при подъеме капота. Поэтому отрицательное значение уравновешивающей силы означает, что капот под воздействием силы газовых пружин стремится подняться вверх и для его опускания необходимо приложить силу вниз.
Для простоты визуальной интерпретации результатов и удобства подбора требуемой характеристики изменения уравновешивающей силы на рукоятке целесообразно иметь характеристику потребной величины этой силы. Для формирования такой характеристики принимаем, что в верхнем положении необходимо приложить силу 60 Н для опускания, в нижнем положении необходимо приложить силу не более 40 Н для открывания, а во всем диапазоне подъема абсолютная величина этой силы не должна превышать 100 Н. Наиболее простым выражением, формирующим подобную зависимость, является выражение (19).
FP _ tr ( h ) = 40-
( h max — h min )
• ( h-h min )-
Для первоначального правильного выбора газовой пружины до проведения анализа целесообразно провести оценку механизма по по-
тенциальной энергии и подобрать пружину по потребной работе. Если для подбора параметров механизма потребуется проведение много-
параметрической оптимизации одним из известных способов, необходимо будет сформировать критерий численной оценки степени оптимальности характеристики. Для этого необходимо сформировать целевую функцию.
В качестве численного критерия степени оптимальности характеристики целесообразно использовать сумму абсолютных отклонений заданной характеристики изменения уравновешивающей силы от реальной характеристики (20). Чем меньше величина, вычисленная по выражению (20), тем оптимальнее характеристика уравновешивания.
A FA h ) =1 Fp _ »( h ) - ҒР верх ( h ) I + I Fp _ tr ( h ) - Fp„ ( h ) I . (20)
В качестве целевой функции при проведении численной оптимизации требуется использовать интегрированный показатель, который может быть получен из выражения (20), но который должен характеризоваться одним численным значением.
В качестве непосредственно целевой функции при проведении оптимизации можно использовать сумму значений численного критерия оптимальности (21), полученного из выражения (20), для всех рассчитываемых положений с заданной дискретностью. Тогда оптимизация будет заключаться в подборе параметров механизма с целью минимизации величины выражения (20).
h h m ax
FunOpt= £ A F „pt ( h ). (21)
h=h min
Для ограничения в заданных пределах величин отдельных параметров при проведении численной оптимизации к целевой функции целесообразно добавить набор штрафных функций, сформированных специальными математическими функциями по этим ограничиваемым параметрам. Тогда выбранный алгоритм оптимизации не будет «упираться в стенку» при подборе параметров механизма, а будет «мягко» обходить нежелательные области существования системы.
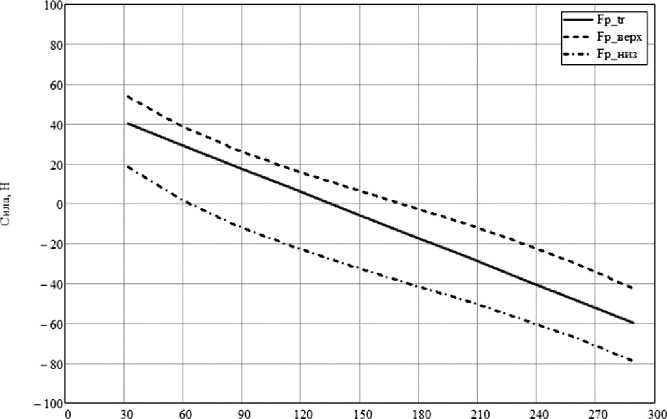
Результаты и их обсуждение. По результатам проведенной оптимизации построена характеристика изменения уравновешивающей силы на рукоятке при повороте капота вниз и вверх совместно с требуемой характеристикой этой силы для одного из возможных вариантов механизма, которая показана на рисунке 3.
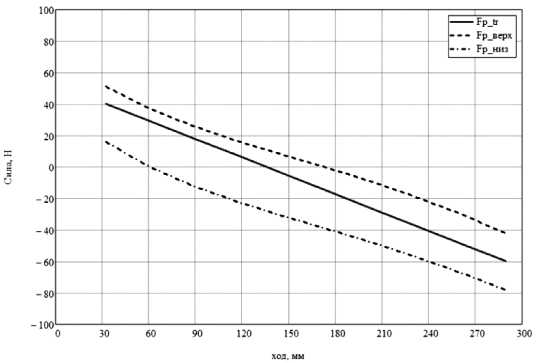
Fp верх (h) – при повороте капота вверх; Fp низ (h) – вниз;
Fp_tr(h) – требуемая характеристика уравновешивающей силы Рисунок 3 – Характеристика изменения уравновешивающей силы на рукоятке
По результатам расчета сила, требуемая для закрывания с учетом сил трения и гистерезиса, изменяется в диапазоне от -78,4 до +16 Н, при этом для открывания от +51,4 до -42,1 Н. Из рисунка 3 видно, что линия требуемой характеристики силы на рукоятке (Fp_tr) проходит между реальными линиями характеристик изменения этой силы при повороте капота вверх и вниз. Это говорит о том, что параметры меха- низма подобраны достаточно рационально с точки зрения обеспечения величины уравновешивающей силы. В данном проиллюстрированном примере были выбраны параметры газовой пружины, а также для ее использования были адаптированы параметры механизма.
Кроме сил трения и гистерезиса самой пружины на характеристику изменения уравновешивающей силы на рукоятке капота большое влияние оказывает жесткость мест установки пружины на раме косилки и на капоте. Как правило, при установке пружин с подобранной расчетной характеристикой часто возникает необходимость использования для их установки кронштейнов с большим вылетом относительно одной из сторон конструкций – либо со стороны капота, либо со стороны рамы. В итоге конструкция крепления газовой пружины обладает упругой податливостью при сохранении ее прочности. При этом добиваться увеличения ее жесткости не всегда рационально, так как это приведет к увеличению материалоемкости изделия. Данная особенность конструкции таких механизмов приводит к изменению координат крепления точек пружины в процессе открыва-ния/закрывания и соответственно к изменению плеч и характеристики изменения получаемой силы на рукоятке капота. Поэтому при проведении расчета после предварительной проработки конструкции необходимо оценивать жесткость элементов крепления газовых пружин и учесть их влияние на конечную характеристику.
Проведем анализ жесткости элементов крепления газовых пружин. Картину напряженно-деформированного состояния капота косил- ки целесообразно получить путем построения его твердотельной модели с последующим приложением нагрузок и расчетом в одном из конечно-элементных пакетов [8, 9].
В расчетной схеме наложены следующие граничные условия и связи. Между капотом и рамой в местах установки петель заданы вращательные шарниры, между кронштейном крепления пружины на раме, с одной стороны, и кронштейном крепления пружины со стороны капота задана сила, соответствующая максимальной нагрузке, реализуемой газовой пружиной F max =760 Н. В точке расположения рукоятки реализован запрет на перемещение в вертикальной плоскости. Задаем материалы, используемые в конструкции, со следующими параметрами: модуль упругости E =200000 МПа, коэффициент Пуассона μ =0,3, удельная плотность γ =7500 кг/м3, предел текучести 250 МПа, что соответствует стали 3 пс [10].
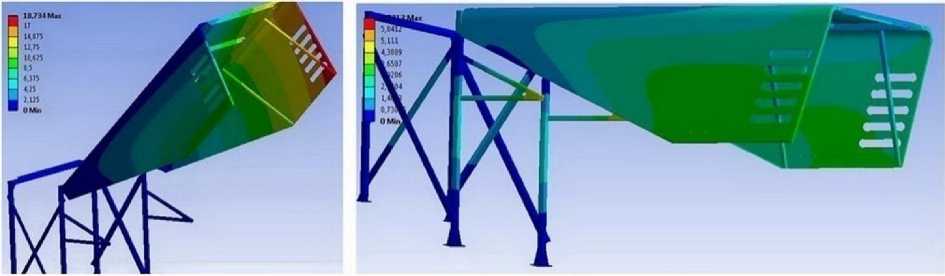
На рисунке 4 приведено деформированное состояние исследуемой конструкции с присоединенными размерами установки газовых пружин, которые обеспечивают характеристику, приведенную на рисунке 3.
а б
Рисунок 4 – Деформированное состояние конструкции капота в открытом ( а ) и закрытом ( б ) состоянии
По результатам расчета (см. рисунок 1) деформация точки крепления пружины на раме в вертикальном направлении в закрытом состоянии капота составила δy1=2 мм, в горизонтальном – δх1=4,9 мм. В открытом состоянии смещение точки составило: по вертикали – δy2=0,8 мм, по горизонтали – δх2=1,9 мм. При этом для всех режимов работы механизма прочность элементов в опасных сечениях кронштейнов крепления газовых пружин конструкции обеспечивается с минимальным запасом 1,7. Увеличение жестко- сти элементов крепления пружин для минимизации упругой деформации конструкции приведет к увеличению материалоемкости, что не всегда является оптимальным решением.
Проведем оценку влияния смещения точек крепления пружин на характеристику изменения силы на рукоятке капота. Для этого в вышеприведенной математической модели механизма открывания учтем перемещение точки А в зависимости от угла положения капота по формулам (22) и (23):


Итоговая характеристика изменения уравновешивающей силы на рукоятке при повороте капота вниз и вверх представлена на рисунке 5.
По результатам расчета сила, требуемая для закрывания с учетом сил трения и гистерезиса, изменяется в диапазоне от -79 до +18,6 Н, при этом для открывания от +53,8 до -42,6 Н. Смещение точек крепления газовой пружины за счет упругой деформации кронштейнов привело к увеличению максимальной силы на рукоятке в 1,012–1,047 раз при открывании капота и в 1,006–1,16 раз при закрывании капота.
В некоторых случаях, когда плечо силы действия газовой пружины невелико, выше рас- смотренное влияние жесткости элементов крепления пружины может изменить характеристику в несколько раз. Это приводит к тому, что при изготовлении опытного образца обнаруживается неполное открывание капота на требуемый угол, в связи с чем появляется необходимость использования дополнительных предохранительных элементов конструкции, удерживающих капот в открытом положении. Именно для исключения таких случаев требуется дополнительная проверка характеристики механизма уравновешивания капота после первичной проработки конструкции с учетом ее жесткости, и при необходимости – проведение корректировки точек крепления газовых пружин.
Fp верх (h) – при повороте капота вверх; Fp низ (h) – вниз;
Fp_tr(h) – требуемая характеристика уравновешивающей силы Рисунок 5 – Характеристика изменения уравновешивающей силы на рукоятке с учетом смещения точек крепления пружины за счет деформации
Небольшое влияние жесткости в данном конкретном случае связано с тем, что перемещение точки крепления пружины не вызывает значительного изменения плеча пружины относительно точки поворота. Как результат, характеристика изменения силы на рукоятке удовлетворяет исходным требованиям. А именно: максимальная сила на рукоятке не превышает 100 Н, в открытом положении капот удержива- ется с силой не менее 43 Н, в закрытом положении обеспечивается его прижатие к ограничителю силой не менее 18 Н.
При подборе параметров механизма уравновешивания использование графиков, аналогичных приведенным на рисунках 3 и 5, является необходимым условием для оценки степени оптимальности подобранных параметров.
Выводы. В работе на примере механизма уравновешивания капота сельскохозяйственной машины с применением газовых пружин представлен векторный метод исследования механизмов. Он позволяет доступно и наглядно аналитически описывать кинематику проектируемых механизмов подъема капотов и осуществлять анализ их работы. Этот метод позволяет применять различные методы оптимизации для решения поставленной технической задачи.
В качестве целевого критерия для подбора параметров механизма предлагается использовать изменение характеристики потребной силы на рукоятке. При подборе параметров механизма необходимо учитывать реальную характеристику силы на газовой пружине с учетом гистерезиса. При использовании методов оптимизации необходимо подобрать наиболее показательный численный критерий степени оптимальности и на его базе сформировать целевую функцию.
В случае установки газовых пружин с использованием малых плеч после первичной проработки необходимо учесть жесткость всей конструкции и оценить ее влияние на конечную характеристику механизма подъема капота. При необходимости откорректировать положение точек установки пружин так, чтобы характеристика изменения усилия на рукоятке удовлетворяла исходным требованиям.
Описанная в статье методика проектирования механизмов уравновешивания капотов сельскохозяйственных машин уже более 15 лет успешно применяется в НТЦК ОАО «Гомсель-маш».
Список литературы Оптимизация параметров механизма подъёма капота косилки с применением газовых пружин
- Чупрынин, Ю.В. Алгоритм расчета геометрии ременного контура векторным способом/Ю.В. Чупрынин, А.А. Дюжев//Тракторы и сельскохозяйственные машины. -2005. -№ 6. -С. 39-40.
- Котов, А.В. Применение векторного анализа при проектировании рычажных механизмов/А.В. Котов, Ю.В. Чупрынин//Научно-технический прогресс в сельскохозяйственном производстве: материалы Междунар. науч.-практ. конф. -Минск, 2007. -С. 32-37.
- Джасов, Д.В. Применение векторного анализа для математического описания пространственных рычажных механизмов на примере моста управляемых колес сельскохозяйственной машины/Д.В. Джасов, А.Я. Машук, Ю.В. Чупрынин//Актуальные вопросы машиностроения: сборник научных трудов. -Минск, 2013. -Вып. 2. -С. 102-106.
- Бронштейн, И.Н. Справочник по математике для инженеров и учащихся втузов/И.Н. Бронштейн, К.А. Семендяев. -М.: Наука. Главная редакция физико-математической литературы, 1981.
- Рехлицкий, О.В. Синтез механизмов уравновешивания с газовыми пружинами с использованием векторного анализа/О.В. Рехлицкий, Д.В. Джасов, С.В. Труханович//Актуальные вопросы машиностроения: сборник научных трудов. -Минск, 2013. -Вып. 2. -С. 106-110.
- Джасов, Д.В. Проектирование механизма поворота колес самоходной сельскохозяйственной машины/Д.В. Джасов//Сборник научных трудов по материалам XVIII международной научно-практической конференции «Инновационные направления развития АПК и повышение конкурентоспособности предприятий, отраслей и комплексов -вклад молодых ученых». -Ярославль: ФГБОУ ВПО «Ярославская ГСХА», 2015. -C. 8-13.
- Джасов, Д.В. Математическое моделирование механизма поворота колес самоходной сельскохозяйственной машины/Д.В. Джасов, В.Б. Попов//Сборник научных работ студентов Республики Беларусь «НИРС 2015». -Минск: Изд. центр БГУ, 2016. -409 с.
- Bathe, K.-J. Finite element procedures. -USA: Prentice Hall, Pearson education, Inc, 2006. -1037 Р.
- Huebner K.H., Dewhirst D.L., Smith D.E., Byrom T.G. The finite element method for engineers, J. Wiley & Sons, Inc., 2001.
- Басов, К.А. ANSYS для конструкторов/К.А. Басов. -М.: ДМК Пресс, 2016. -247 с.
