Оптимизация процессов разделения многокомпонентных смесей

Автор: Демиденко Николай Данилович, Терещенко Юлия Анатольевна
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Кибернетика, системный анализ, приложения
Статья в выпуске: 5 (31), 2010 года.
Бесплатный доступ
Предложена математическая модель процессов разделения многокомпонентных смесей. Сформулирована задача оптимального управления, получены необходимые условия оптимальности. Разработан численный метод решения задач оптимизации, проведены численные эксперименты.
Многокомпонентная смесь, оптимальное управление, нелинейные процессы
Короткий адрес: https://sciup.org/148176318
IDR: 148176318 | УДК: 681.5.01
Optimization of processes of multicomponent mixtures separation
A mathematical model for the processes of mult'component mixtures separation 's presented. A рroblет of optimal control is formulated. Necessary optimal conditions are obtained. A numerical method of optimization problems solving is developed.
Текст научной статьи Оптимизация процессов разделения многокомпонентных смесей
Исследование и проектирование систем химической технологии представляет собой сложную задачу, так как при ее постановке используются нелинейные системы дифференциальных уравнений в частных производных [1–5]. Математическая формулировка таких задач и вопросы их корректности, как правило, требуют специального рассмотрения. Трудности, прежде всего, связаны с нелинейностью уравнений и сложностью граничных условий, содержащих обыкновенные дифференциальные уравнения. С другой стороны, эти трудности обусловлены многомерностью задач, поскольку технологические процессы характеризуются довольно большим числом теплофизических и конструктивных параметров. Выбор эффективной методики решения задач моделирования и управления принято считать центральным вопросом в проблеме моделирования нестационарных режимов управляемых процессов разделения.
Основным инструментом проектирования технологических процессов и систем управления является вычислительный эксперимент, включающий в себя анализ многообразия технологических режимов, по- строение их физических и математических моделей, разработку и исследование вычислительных алгоритмов, их программную реализацию и проведение серии расчетов [3].
В настоящей работе формулируются и решаются задачи анализа математических моделей процессов разделения, задачи оптимального управления и численных экспериментов с целью проектирования энергосберегающих технологий разделения многокомпонентных смесей для промышленных объектов и создания соответствующих оптимальных систем управления.
Процесс разделения многокомпонентных смесей осуществляется в ректификационных колоннах на контактных устройствах (тарелках), распределенных по длине аппарата. Технологический процесс происходит в конечном числе точек объекта, однако его можно рассматривать непрерывным по длине, поэтому для моделирования возможно применение дифференциальных уравнений в частных производных. Оценка погрешности перехода от дискретной модели к непрерывной приведена в [1]. Концентрации целе- вого продукта в жидкости x = x(l, t) и паре y = y (l, t) -управляемые параметры, они определяются в результате решения соответствующей краевой задачи.
Разделяемая смесь в количестве F = F ( t ) с содержанием целевого продукта xF = xF ( t ) подается в среднюю часть колонны. В нижней ее части (кубе) происходит испарение смеси, и паровой поток V = V ( l , t ), поднимаясь вверх, контактируя со стекающей жидкостью L = L ( l , t ) и обогащаясь целевым продуктом, конденсируется в верхней части колонны (дефлегматоре) и отбирается в количестве D с концентрацией целевого продукта x d = x d ( t ). Часть сконденсированного пара L d = L d ( t ) из дефлегматора возвращается в колонну для повышения качества конечного продукта. В кубе отбирается остаток в количестве W = W ( t ) с содержанием целевого продукта x- = x- ( t ) (рис. 1).
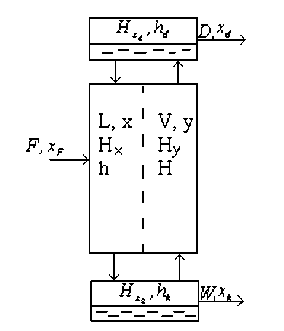
Рис. 1. Схема потоков пара и жидкости в колонне
Одним из требований к такому промышленному объекту является его способность к увеличению содержания целевого продукта в верхней части колонны и уменьшению в нижней. Важными параметрами объекта являются фазовые удерживающие способности: в колонне Hx = Hx ( l , t ), H y = H y ( l , t ), кубе
H = H (l, t) и дефлегматоре H = H (l, t). Индек-xk xr xd xd сы x и y указывают на принадлежность параметра жидкости или пару, k и d – кубу или дефлегматору. В колонне происходит теплообмен между жидкой и паровой средами, которые характеризуются теплосодержаниями жидкости h = h(l, t) и пара H = H(l, t); аналогично, в кубе hk = hk (t) и в дефлегматоре hB = hB (t), Hd = Hd (t). В куб подводится тепло Qk, а из дефлегматора оно отводится – Qd . Коэффициент массопередачи ky характеризует процесс массообме-на между жидкой и паровой фазами, а зависимость y* = y*(x) - равновесную концентрацию в паре. Функции x(l, t), y(l, t), xk(t), xd (t) и yd (t) могут быть скалярными (для бинарных смесей) или вектор- ными (для многокомпонентных). Более подробная физическая интерпретация математической модели содержится, например, в [5].
Используя законы сохранения массы и энергии, получим математическую модель нестационарных режимов процессов разделения для колонны, куба и дефлегматора:
д ( Hxx ) д ( Lx ) — д t д l
= k y ( y - y * ) + F ( t ) Ф x ( l ) x F ,
д ( Hy y ) Л Vy ) _ .
—----+——=ky -y , дt д l A ’
д( HyH) , д( Hxh) д(Lh) , д(VH) = ф +ф
д t д t д l д l h H’
д V д l
дL дHx дH
--+ —- + —- = Ф V + Ф,, д l д t д t
x ( l ,0) = x o ( l ), y ( l ,0) = y o ( l ), V ( l ,0) = V o( l ), L ( l ,0) = L 0( l );
с граничными условиями при l = 0
д ( Hx xk )
= L (0, t ) x (0, t ) - V (0, t ) y (0, t ) - W ( t ) x - ( t ), д t
y (0, t ) = ( y ' ( x- ) - x- ) a + x- ( t ),
( H x - h k1 )
д t
= L (0, t) h (0, t) - V (0, t) H (0, t) - W (t) h- (t) + Qk, дHx
-= - = L (0, t ) - V (0, t ) - W ( t ), x - (0) = x - 0;
дt и при l = 1
д ( H xd )
= V d y d - ( L d + D ) x d ( t ), x d (0) = x d ,0
д t
Vd (t) yd (t) - V (1, t) y (1, t) = Ld (t) xd (t) - L (1, t) x (1, t), yd(t) = y(1, t) + Ed(y'(x (1, t)- y(1, t)),
д ( H hd )
= V d ( t ) H d - ( L d + D ) h d ( t ) - Q d ,
д t
д ^
-fV = V d ( t ) - ( L d ( t ) + D ( t )), V d - V (1, t ) = L d - L (1, t ),
дt
H d V d - V (1, t ) H (1, t ) = L d h d - L (1, t ) h (1, t ).
Решение ищется в области
Q = { ( l , t )| l e [ 0,1 ] , t g [ 0 , T ] } , где l , t - пространственная и временная независимые переменные соответственно; T – время управления.
Считаем в дальнейшем, что Hx = const,
H = const, kx = k = const, H, = const, H, = const, y y xk xd x = x (l, t), y = y (l, t), L = L (l, t), V = V (l, t),
Ф H = Ф H ( l , t ), Ф h = Ф h ( l , t ), Ф L = Ф L ( l , t );
Фу = Ф у ( l,t ) - известные функции,
H = a, x + a2 y + a3 V + a4 L, h = P, x + P2 y + в3 V + в 4 L, где ai = const, вi = const, i = 1,4. При Ed = 0 пола- гаем, что yd = y(1, t), xd = x(1, t), xd (0) = x(1,0) = xd,0, Ld = L(1, t), Vd = V(1, t).
Кроме того, Hy a , + Hx P 1 = A , Hy a 2 + Hx P 2 = B , H y а з + H x Р з = C , H y a 4 + H x P 4 = D 0.
В качестве управляющих воздействий из технологических соображений выбираем потоки жидкости и пара на входах в управляемый аппарат L ( 1, t ) и V (0, t ). На эти управляющие потоки накладываются ограничения
L min < L ( t ) < L max , V ^ < V ( t ) < V ^. (5)
J । = JJ ( y -@ * ) + E X ' f X-"й VM? 1 - "й J dldt = q _ ' = 1 V д t 7 ' = 1 V 3i 7]
= JJ H ^I3^3^ ' dldt + jE (^- dt -X 'dl ) z .
Q L ' = 1 V d t 3 i 7 ] SQ ' = 1
Пусть t = a ( c ), l = P ( c ) - параметрическое задание границы dQ . Тогда
J = [ Й + vf^X + ^Ь,X dldt + 1 J fi J L 1 :1 Vd t d l J ' ]
Поскольку в дальнейшем для решения задачи оптимального управления будет использован метод вариационного исчисления, введем дополнительные управляющие функции u ( t ), z ( t ), с помощью которых ограничения сводятся к равенствам:
( L (1, t ) - L m, )( L max - L (1, t ) ) — U 2 = 0,
( V (0, t ) — V min )( V max - V (0, t ) ) — z 2 = 0.
В качестве критерия оптимизации выбираем интеграл, характеризующий качество продуктов разделения на выходе управляемого объекта:
T 1 2
S = JJ ( У ( l , t ) -© * ( l , t ) ) dldt ^ min, (7)
+ J]T ( h a' ( c ) -X ' p' C c ) ) zd a . an ' = 1
Получим вариацию J 1 , вызванную вариациями управлений L ( 1, t ) и V (0, t ):
a J 1 = JJ
Q
:
' = 1
d H dX, дц, --+ —L + —-д 2 ' д t д l

V д Я х
> -----о u,.
tr д U' 1
+ J : ( ^-a' ( o ) -X j P' C g ) ) zd a . дQ ' = 1
dldt +
Вариация для вспомогательного функционала 0 J 2
на границе дQ вычисляется аналогично:
где 0 ( l , t ) - заданный состав выходного продукта.
Сформулируем следующую задачу: во множестве кусочно-непрерывных функций, удовлетворяющих ограничениям (5) найти такие, которые в силу системы (1)–(4) минимизируют выражение (7).
Для получения необходимых условий оптимальности воспользуемся методами вариационного исчисления. Построим скалярные функции – гамильтонианы Й uh в области Q и на границе 3Q соответственно:
5 J 2 = J
5Q _
д h д h д h
-------5 x (0, t ) +--5 y (0, t ) +--5 L (0, t ) + д x (0, t ) S y (0, t ) д L (0, t )
д h n а д h д h д h
+--5 V (0, t) +--5 u +--5z +--5y (1, t) + д V (0, t) ди дz дy (1, t
д h д h
+--5L (1, t) +-- дl (1, t) v ’ д V (1, t)
. 1, г ( д h d X^ Y
5 V (1, t ) dt +11--1--5 x^dt +
_ ддn Vд xk dt 7
Г 7 дhld
+ I+— дЪVдx (1, t)
Таким образом, вычислена вариация вспомога тельного функционала 5J = 5J1 +5J2. Используя ар-
>x (1, t ) dt - ( X k 05 x k + X d °5 x (1, t ) )|
H = ( У -о * )2 + ^ Х Л + Е ц , ^, i = 1 ' = 1
где X ' , ц - множители Лагранжа;
l
h = -^ [ L (0, t ) - V (0, t ) y (0, t ) - W ( t ) x k ( t ) ] + H
гументацию вариационного исчисления, получим следующую сопряженную задачу относительно функций Лагранжа, на основе которой разработан численный алгоритм расчета оптимальных управляющих функций [1; 2; 5].
В области Q имеет место следующее:
xk
+ X k 2) [ У (0, t ) - xk - a ( У * ( xk ) - xk ) ] +
+X k ” [ L (0, t ) - V (0, t ) - W ( t ) ] + X d 1) Щ) X H x d
X [ y (1, t ) - x (1, t ) ] + X d 2) [ V (1, t ) - L (1, t ) - D ( t ) ] + + y[( L (1, t ) - L min )( L max - L (1, t ) )- u 2 ] + + s[ ( V (0, t ) - V min )( V max - V (0, t ) ) - z 2 ] ,
|
3X 1 +дЦ 1 = _ д t д l |
[ k ( у ) x _ |
7 X X —L + —— + HH V x y |
X 3 C |
7 AL - А1 |
1 + 7 |
||
|
V |
H x H |
y 7 |
|||||
|
7 X, + U 4\й~~ V Hx |
X 3 A 1 H x C J |
u 4 +Ф V +Ф + C |
L a |
1 |
u 4 R " - C в 1 ] |
, |
|
3X 2 дц2 "дТ+"дТ
- u 4
2( y -9 * ) + k
( H x
X 2 X 3 A. X 3 B 1
H y H x C H y C J
X 2
где X k' ) , X *' ) , y , £ - множители Лагранжа.
Будем считать, что x = z 1 , y = z 2 , V = z 3 , L = z 4 . Рассмотрим вспомогательный функционал:
V H y
X 3 b I ф к +ф l Y
X2
H y C J H y V 2
7 U 4 +Ф V +Ф L
'3 I a 2

U 4 e
C 2
|
дХ - дц - _ --1--= — |
u |
Г - 2 X - B + |
Х3 ' —- а2 |
— |
|
|
д t д l |
2 |
1 НУ НУС |
C 2 |
||
|
u 4 Х 3 ( — |
—а - C |
+ а 4 ) Х - а - ( ф С ( V |
+Ф L ) — |
||
|
Х 3 и 1 а 1 —— C |
X , |
^ и 4 х |
+ Фи +Ф/, ----V-----L а3 C 3 |
u ^ в Т с в - 7] |
, |
|
дХ 4 +5^ д t д l |
= — |
-u 1- Гх, — х3 A Xх - в2 u _ Нх X 1 3 С J С 22 |
+ |
||
|
Х + "С u 4 |
( в - |
— в 4 ) + С^ в - (ф V +ф L ) + |
|||
|
Х - и 1 в 1 + C |
Х 3 |
u 4 |
+ ф V +ф L ex |
u ^ Т1 с в 4 7] |
|
|
С 4 |
. |
||||
В этой системе неизвестные ц i или X i ( i = 1, 4) исключаются с помощью соотношений
Х 1 г ц +-- L 1 H x
Х2 v ц2---+
2 H y
-
X - AL
-
V а1 - L в,
X
X . — C D *
Г A
B
HC x
- Bv
H y C
C
1 X - = 0,
— C (V“2 — Le2 ) = 0,
ХХ
= 0, Ц - + Ц + — x — — у HH
x
y
X3 --- X
C
— х--у l Н х Н у
+ H — h — L (в- +в4) + V (a4 —
) а 3 ) = 0.
Граничные условия 0 < t < T при l = 0 имеют вид
d X? Хф
—
dt
H- W ( t ) — Х™ [ 1 + a ( у * ( х , ) '- 1 x
xk
)] = 0,
ц 1 +
х , 1
(1) (1)
^L (0, t ) = 0, ц ;; - (0, t ) + Х,2) = 0, H xk
H x k
Ц
+ x ( 0, t ) + X ( -) = 0, 2 s z = 0, Hx k k
grad S V =
+ S ( V max
Ц — ^ у (0, t) —Х™ +
H x
+ V min — 2 V ( 0, t ) ) = 0;
при l = 1
(1) (1)
Х - 1 (1, tbh (1, t ) = 0, dt H xd
-^V ( 1, t ) —ц ( 1, t ) = 0, Hx d
Х/ (У (1, t)— x (1, t)) + -2 — Ц- (1, t) = 0, Hxd grad SL = X + Y (Lmax + Lm, — 2 L (1, t)) — Ц4 (1, t) = 0, 2y и = 0.
Начальные условия при t = T , 0 < l < 1 выглядят так:
Х 1 =Х 2 =Х - = Х 4 = 0, Х < 1)( T ) = 0, Х^( Т ) = 0.
Для вычисления оптимальных управляющих функций V (0, t ) и L (1, t ) применяется итерационный метод, который заключается в следующем:
-
1) задаются начальные приближения V 0(0, t ) и L 0(1, t );
-
2) если известны Vn (0, t ) и Ln (1, t ), то находятся решения прямой и сопряженной задач;
-
3) полагаем, что V ” + 1(0, t ) = V n (0, t ) — T 1 grad S V , L n + 1(1, t ) = L ” (1, t ) — T 2 grad S l ;
-
4) предельные значения L (1, t ) и V (0, t ) дают решение задачи оптимального управления.
Для численного решения краевых задач и задач оптимального управления разработан численный алгоритм с использованием метода центральных разностей и треугольных сеток [1]. В качестве примера приведены результаты расчетов оптимальной управляющей функции L ( l , t ) при оптимизации пускового режима для промышленной колонны К-34 установки серно-кислотного алкилирования изобутана бутиленами (разделяемая многокомпонентная смесь сведена к бинарной). На рис. 2 показано изменение концентрации бутана в сырье (рис. 2, а ), в дефлегматоре (рис. 2, б ), в кубе (рис. 2, в ) при управлении потоком жидкости. Оптимальная управляющая функция L ( l , t ) изображена на рис. 3. При оптимальном управлении выход на заданное значение концентрации целевого продукта происходит быстрее, чем при неоптимальном. Подробное описание установки и экспериментальные значения основных параметров процесса приведены в [5].
