Оптимизация структуры унифицированного многоканального интерфейсного модуля контроля температур для измерительных приборов космических аппаратов

Автор: А.И. Горностаев
Журнал: Космические аппараты и технологии.
Рубрика: Космическое приборостроение
Статья в выпуске: 3, 2019 года.
Бесплатный доступ
При разработке унифицированного многоканального интерфейсного модуля контроля температур для измерительных приборов, строящимся по магистрально-модульному принципу на базе центрального приборного модуля и используемых на космических аппаратах различного назначения, первостепенной задачей является оптимизазация его структуры, позволяющей обеспечить контроль температуры на элементах конструкции космических аппаратов в различных диапазонах измерения и с различными требованиями по точности и стабильности измерения. Статья посвящена анализу общих требований к структуре многоканального интерфейсного модуля контроля температур, в котором измерительные каналы могут иметь различные технические характеристики, и выбору вариантов схем измерения сопротивлений термопреобразователей, обеспечивающих устранение систематической составляющей погрешности измерения. Показано, что в структуре унифицированного многоканального интерфейсного модуля контроля температур должна быть многоканальная схема измерения, образующая несколько измерительных каналов с различными техническими характеристиками, работающими на общий канал аналого-цифрового преобразования. Для согласования измерительных каналов, имеющих различные входные сопротивления и работающих в различных диапазонах измерения, с общим каналом аналого-цифрового преобразования необходимо использовать управляемый нормирующий усилитель. Для исключения систематической составляющей погрешности измерения необходимо использовать трех- или четырехпроводные варианты схем измерения термопреобразователей сопротивления, позволяющие производить автокомпенсацию погрешности измерения, вносимую сопротивлениями проводов линий связи измерительных кабелей, и автокалибровку погрешности измерения, вносимую измерительными каналами. Для компенсации нелинейной составляющей погрешности измерения, вносимой термопреобразователями сопротивления, необходимо на основе кусочно-линейной аппроксимации их номинальных статических характеристик разбить рабочие диапазоны измерения на поддиапазоны и осуществлять автокалиброву погрешности измерения в каждом поддиапазоне отдельно.
Космический аппарат, контроль температуры, точность и стабильность измерения, измерительный прибор, термопреобразователь сопротивления, автокомпенсация, автокалибровка
Короткий адрес: https://sciup.org/14114633
IDR: 14114633 | УДК: 629.7.05 | DOI: 10.26732/2618-7957-2019-3-171-183
Optimization of the structure of the unified multichannel interface temperature control module for measuring instruments of spacecraft
In the development of a unified multi-channel interface temperature control module for measuring instruments, built on a main-modular principle on the basis of the central instrument module and used on spacecraft for various purposes, the primary task is to determine its structure, which allows to provide temperature control on the elements of the spacecraft design in different measurement ranges and with different requirements for accuracy and stability of measurement. The article is devoted to the analysis of general requirements to the structure of the multi-channel interface temperature control module, in which the measuring channels can have different technical characteristics, and the choice of variants for measuring the resistance of thermal converters to ensure the elimination of the systematic component of the measurement error. It is shown that in the structure of a unified multichannel interface temperature control module there should be a multichannel measurement scheme forming several measurement channels with different technical characteristics operating on a common channel of analog-to-digital conversion. To match the measuring channels with different input resistances and operating in different measurement ranges with the common channel of the analog-to-digital converter, it is necessary to use a controlled normalizing amplifier. To eliminate the systematic component of the measurement error, it is necessary to use three- or four-wire variants of the measurement schemes of thermal resistance converters, which allow the automatic compensation of the measurement error introduced by the resistances of the wires of the communication lines of the measuring cables, and the automatic calibration of the measurement error introduced by the measuring channels. To compensate for the nonlinear component of the measurement error introduced by thermal resistance converters, it is necessary on the basis of piecewise linear approximation of their nominal static characteristics to divide the operating ranges of measurement into subranges and to carry out automatic calibration measurement errors in each subrange separately.
Текст статьи Оптимизация структуры унифицированного многоканального интерфейсного модуля контроля температур для измерительных приборов космических аппаратов
Многоканальный интерфейсный модуль контроля температур (ИМКТ), используемый для контроля температуры на элементах конструкции космических аппаратов (КА), является составной
частью измерительных приборов, в основу которых положен магистрально-модульный принцип построения на базе центрального приборного модуля (ЦПМ), обеспечивающего взаимодействие модулей по внутриприборному последовательному периферийному интерфейсу (ППИ).
При проектировании унифицированного многоканального ИМКТ на основе указанного принципа особое внимание уделяется оптимиза-
Том 3
ции его структуры, проведение которой позволило бы использовать ИМКТ в измерительных приборах КА различного назначения при минимальных дополнительных аппаратно-программных затратах на унификацию. При этом для достижения поставленной цели необходимо оптимальным образом решить ряд задач, связанных с обеспечением требуемой точности и стабильности измерения температуры, которые перечислены в [1].
Проведенный в [1] анализ общих требований к измерительным приборам и технических характеристик термопреобразователей сопротивления (ТС), показал, что при определении структуры унифицированного многоканального ИМКТ необходимо учитывать различия в технических характеристиках ТС и условий их применения.
В данной статье дополнительно проведен анализ общих требований, предъявляемых к структуре унифицированного многоканального ИМКТ, и возможных вариантов построения схем измерения, используемых для измерения сопротивления ТС, от выбора которых будет зависеть оптимальность его структуры.
1. Общие требования к структуре унифицированного многоканального ИМКТ
Унифицированный многоканальный ИМКТ в составе измерительных приборов КА выполняет следующие основные функции:
-
• последовательный опрос измерительным током заданной величины различных по номинальному сопротивлению ТС, подключенных к измерительным каналам, и измерение на них уровня напряжения;
-
• усиление измеренного напряжения на ТС до нормированного уровня, необходимого для согласования с аналого-цифровым преобразователем (АЦП) в заданном рабочем диапазоне измерения;
-
• преобразование с помощью АЦП с требуемым разрешением измеренного напряжения на ТС в цифровой эквивалент;
-
• сохранение цифровых данных о результатах преобразования измеренного напряжения на ТС в буферной памяти;
-
• передача цифровых данных о результатах преобразования измеренного напряжения на ТС по запросу ЦПМ с заданной периодичностью из буферной памяти в память ЦПМ.
Исходя из выполняемых основных функций в структуру унифицированного многоканального ИМКТ должны входить (рис. 1) многоканальная схема измерения, АЦП и устройство сбора цифровых данных (УСЦД), работа которых синхронизируется по сигналам схемы управления (СУ), и контроллер интерфейсов (КИ), который осущест- вляет прием цифровых данных по параллельному интерфейсу (ПИ) из УСЦД и передачу по внутри-приборному интерфейсу ППИ в ЦПМ.
Унифицированный многоканальный ИМКТ
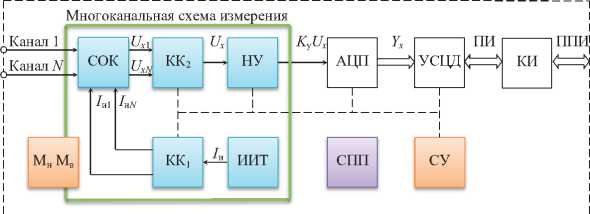
Рис. 1. Упрощенная структурная схема унифицированного многоканального ИМКТ: Мн и Мв – меры измеряемой величины для нижней и верхней калибровочных точек; СОК – схема опроса каналов; КК1 и КК2 – коммутаторы каналов;
ИИТ – источник измерительного тока;
НУ – нормирующий усилитель; СУ – схема управления; СПП – схемы подавления помех; АЦП – аналого-цифровой преобразователь; УСЦД – устройство сбора цифровых данных; КИ – контроллер интерфейсов; ПИ – параллельный интерфейс; ППИ – последовательный периферийный интерфейс
Унифицированный многоканальный ИМКТ для повышения точности и стабильности измерения может выполнять и дополнительные функции:
-
• последовательный опрос внутренних прецизионных имитаторов выходной электрической величины ТС для заданных калибровочных точек и измерение на них уровней напряжений, используемых для получения калибровочных значений цифровых эквивалентов на выходе АЦП и записываемых в память ЦПМ для проведения автокалибровки систематической составляющей погрешности измерения программными средствами ЦПМ в соответствии с заданными алгоритмами;
-
• фильтрацию внешних помех, воздействующих в заданных частотных диапазонах, которые могут возникать как при испытаниях ИМКТ в составе измерительного прибора, так и при его штатной эксплуатации, и приводить к увеличению случайной составляющей погрешности измерения.
Для выполнения дополнительных функций в структуру унифицированного многоканального ИМКТ должны быть добавлены (рис. 1) меры М н и М в имитаторов выходной электрической величины ТС (источники напряжения или сопротивления) для нижних и верхних калибровочных точек, коммутируемые по сигналам СУ через дополнительные (калибровочные) каналы, и специальные схемы подавления помех (СПП).
В такой упрощенной структуре ИМКТ многоканальная схема измерения образует несколько измерительных и калибровочных каналов с раз- личными техническими характеристиками, работающих на общий канал аналого-цифрового преобразования, и должна включать в себя:
-
• схему опроса каналов (СОК), обеспечивающую измерение напряжений Ux 1 … UxN на внешних ТС, подключенных через длинные линии связи измерительных кабелей к N измерительным каналам, и на образцовых мерах М н и М в внутренних имитаторов выходной электрической величины ТС, подключенных к дополнительным (калибровочным) каналам (на рис. 1 не показаны);
-
• общий источник измерительного тока (ИИТ), обеспечивающий протекание поочередно переключаемого с помощью коммутатора каналов КК 1 измерительного тока I и = { I и1 … I и N } на входные цепи опроса СОК;
-
• общий нормирующий усилитель (НУ), обеспечивающий усиление поочередно переключаемых с помощью коммутатора каналов КК 2 измеренных напряжений Ux = { Ux 1 … UxN } с выходных цепей измерения СОК.
Согласование измерительных каналов с АЦП, на вход которого поступает усиленное измеренное напряжение U ацп = KуUx и преобразуется в цифровой эквивалент Yx , должно обеспечиваться путем автоматического изменения коэффициента усиления нормирующего усилителя Kу по сигналам СУ одновременно с выбором измерительного канала.
Общая погрешность Δ x измеряемых напряжений Uх в каналах преобразования ИМКТ будет определяться геометрической суммой независимых случайных составляющих погрешностей всех звеньев канала преобразования
A = A/а2 + A2 +A2 +A2 , x у тс лс ик ацп , где Δтс – погрешность ТС; Δлс – погрешность, вносимая сопротивлениями проводов линий связи ТС; Δик – погрешность, вносимая измерительным каналом, Δацп – погрешность квантования АЦП. Для уменьшения общей погрешности измерения Δx каждая из этих составляющих погрешностей должна минимизироваться различными способами:
-
• погрешность Δ тс – выбором ТС с необходимым классом точности с учетом компенсации (при необходимости) нелинейности его номинальной статической характеристики аппаратнопрограммными средствами и ограничений по величине пропускаемого через него измерительного тока;
-
• погрешность Δ лс – выбором схем измерения с необходимыми способами компенсации сопротивлений проводов линий связи с учетом ограничений к их сопротивлению и длине;
-
• погрешность Δ ик – введением в схемы измерения имитаторов выходной электрической величины ТС и проведением в измерительных
каналах по их мерам М н и М в автокалибровки погрешности измерения программными средствами ЦПМ (при определенных условиях эта погрешность может быть уменьшена до величины погрешности мер М н и М в );
• погрешность Δацп– выбором необходимой разрядности АЦП.
2. Выбор схем измерения сопротивлений термопреобразователей
Учитывая тот факт, что для контроля температуры на элементах конструкции КА в широком рабочем диапазоне измерения используют низкоомные ТС с номинальным сопротивлением 100 Ом, а в узком рабочем диапазоне измерения – высокоомные ТС с номинальным сопротивлением 500 Ом, целесообразно для оптимизации структуры унифицированного многоканального ИМКТ разбить измерительные каналы в многоканальной схеме измерения по входному сопротивлению на две группы с достаточным количеством каналов для контроля температуры на КА различного назначения и обеспечить в пределах каждой группы согласование измерительных каналов с АЦП для различных рабочих диапазонов измерения.
Может быть также предусмотрено переключение рабочего диапазона измерения в каждом измерительном канале с помощью программных средств ЦПМ, если в процессе эксплуатации потребуется на элементах конструкции КА изменить температурный режим работы или же, в случае кусочно-линейной аппроксимации нелинейной номинальной статической характеристики ТС, перейти на другой поддиапазон измерения.
Для измерения температуры на элементах конструкции КА с помощью ТС с различными номинальными статическими характеристиками (зависимостями сопротивления от температуры), необходимо измерять величину их омического сопротивления R тс . Исходя из предъявляемых требований по точности и стабильности измерения температуры в заданных для каждого измерительного канала рабочих диапазонах измерения измерение сопротивлений R тс в многоканальном ИМКТ возможно с помощью трех вариантов схем измерения: двухпроводной, трехпроводной и четырехпроводной. Каждый из возможных вариантов схем измерения может иметь различные способы построения в зависимости от применяемого метода измерения.
Для измерения сопротивления R тс применимы методы, основанные либо на задании калиброванного тока и измерении напряжения, вызванного протеканием калиброванного тока, либо на задании калиброванного напряжения и измерении тока, вызванного воздействием калиброванного
напряжения. Возможен также вариант, когда одновременно измеряются как ток, так и напряжение при использовании некалиброванных источников измерительных сигналов. Однако в связи с наличием в современных интегральных АЦП двух цифроуправляемых источников тока экономически эффективнее применять методы, основанные на задании калиброванного тока. Поэтому в данной статье рассматриваются схемы измерения сопротивления R тс с применением только этих методов.
В схемах измерения с заданным калибро-174 ванным измерительным током Iи для определения сопротивления Rтс применяют два метода:
-
• метод непосредственной оценки, когда измеряется непосредственно напряжение U тс на сопротивлении R тс , вызванное протекающим измерительным током I и , при этом величина R тс рассчитывается по формуле R тс = U тс / I и ;
-
• метод сравнения с мерой, когда измеряется отклонение напряжения ∆ U тс на сопротивлении R тс от напряжения на известном опорном сопротивлении R оп , вызванные протекающим в каждом из этих сопротивлений измерительного тока I и , при этом ∆ U тс = I и ( R тс - R оп ) = I и ∆ R тс , а величина отклонения сопротивлении R тс от опорного R оп рассчитывается по формуле ∆ R тс = ∆ U тс / I и .
При выборе вариантов схем измерения и способов их построения, позволяющих оптимизировать структуру унифицированного многоканального ИМКТ, необходимо провести сравнительную оценку составляющих погрешностей измерения, которые могут обеспечить указанные методы. При этом независимо от применяемого метода необходимо решить ряд проблем, возникающих при определении сопротивления R тс .
Главная проблема – влияние на результат измерения сопротивления R тс значений сопротивлений проводов линии связи R лс , так как они являются частью цепи ТС. Схема измерения не всегда может быть расположена в непосредственной близости от ТС, поэтому в общем случае для подключения ТС к измерительным каналам ИМКТ могут потребоваться соединительные провода измерительных кабелей, образующие многометровые линии связи с большими значениями сопротивлений R лс , что может привести к недопустимому увеличению погрешности измерения. Также оказывают определенное влияние на стабильность результатов измерения колебания температуры среды, в которой находятся провода линий связи, так как сопротивление R лс зависит от температуры окружающей среды. Для достижения лучших результатов по точности и стабильности измерения в этом случае прибегают к различным способам компенсации сопротивления R лс .
Вторая проблема – влияние на результат измерения сопротивления R тс разброса параметров
Том 3
элементов схемы измерения, так как от их значений зависит отклонение реальной измерительной характеристики от идеальной. Для исключения нелинейной составляющей погрешности измерения схема не должна искажать форму контролируемого сигнала, поэтому должна иметь линейную характеристику (обеспечивается выбором соответствующей элементной базы). Однако разброс параметров элементов схемы измерения может привести к смещению линейной характеристики и изменению ее наклона. В этом случае прибегают к различным способам калибровки погрешности измерения.
Третья проблема – влияние для платиновых и никелевых ТС на результат измерения сопротивления R тс нелинейности зависимости сопротивления от температуры R тс ( t ). Обычно при невысоких требованиях к точности измерения нелинейную составляющую погрешности измерения, вызванную отклонением в указанных для ТС диапазонах измерения температур реальной нелинейной характеристики R тс ( t ) = R 0 (1+ At + Bt 2) от ее линейной аппроксимации R тс ( t ) = R 0 (1+α t ) (где R 0 – значение номинального сопротивления ТС при 0 °С, A и B – температурные коэффициенты сопротивления для нелинейной характеристики и α – температурный коэффициент сопротивления для ее линейной аппроксимации), не учитывают, так как она в условиях эксплуатации КА в диапазоне температур от -10 °С до +40 °С находится в пределах указанного для ТС класса допуска [1]. Однако при прецизионных измерениях эта составляющая погрешности может оказаться существенной и привести к недопустимому увеличению погрешности измерения. В этом случае эту составляющую погрешности измерения оценивают по отклонению графика нелинейной зависимости R тс ( t ) от линейной и, при необходимости, прибегают к ее линейной аппроксимации, разбив общий диапазон измерения на несколько поддиапазонов, и используют для измерения специальные процедуры исключения погрешности нелинейности на основе альтернативных интерполяционных уравнений.
Применение метода непосредственной оценки
Метод непосредственной оценки применяют в схемах измерения многоканального ИМКТ в том случае, когда требуется измерять полное сопротивление ТС в зависимости от изменения температуры Rтс(t) в широком диапазоне, при котором изменение сопротивления Rтс соизмеримо с его номинальным значением R0 при 0 °С. При этом в измерительных каналах максимально измеряемое значение сопротивления Rтс согласовывают с полной шкалой АЦП. В этом случае для обеспечения измерения сопротивления Rтс с высокой точностью и стабильностью возникает проблема получения высокой разрешающей способности преобразования сопротивления Rтс в цифровой эквивалент Yтс, которая может быть решена только использованием АЦП с повышенной разрядностью. Однако это обстоятельство накладывает ограничения на выбор АЦП при проектировании многоканального ИМКТ для измерительных приборов, используемых в системах прецизионной термостабилизации.
Метод может применяться в двух-, трех- и четырехпроводных вариантах схем измерения сопротивления ТС. Использование двухпроводной схемы измерения ограничено допустимой длиной проводов линий из-за влияния их сопротивлений на точность и стабильность измерения. Для обеспечения высокой точности и стабильности измерения предпочитают использовать либо трехпроводные, либо четырехпроводные схемы измерения, поскольку они по сравнению с двухпроводными схемами позволяют компенсировать влияние сопротивлений проводов линий связи на погрешность измерения.
Двух- и четырехпроводные схемы измерения (рис. 2) по сравнению с трехпроводными более просты в реализации, так как не имеют специальных схем автокомпенсации сопротивлений проводов линий связи и требуют использования только одного источника измерительного тока [2; 3].
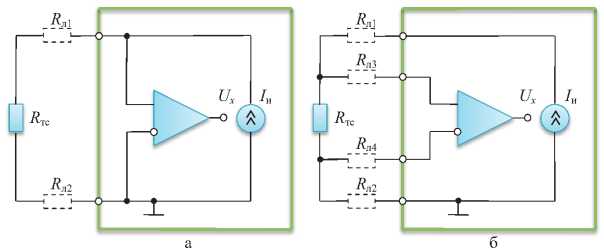
Рис. 2. Двухпроводная (а) и четырехпроводная (б) схема измерения сопротивления ТС
Преимущество двухпроводной схемы измерения (рис. 2а) в том, что для подключения ТС требуются всего два провода, через которые пропускают измерительный ток I и . Однако двухпроводная схема измерения дает наибольшую погрешность измерения, так как провода линий связи подключены последовательно с сопротивлением R тс и их сопротивления R л1 и R л2 воспринимаются измерителем как часть сопротивления R тс . Напряжение на выходе измерителя будет равно Uх = I и R тс + I и ( R л1 + R л2 ). Ошибка измерения сопротивления ТС для этой схемы составит ∆ R ош = R л1 + R л2 . В такой схеме не может быть компенсации сопротивлений R л1 и R л2 , поскольку их значения обычно заранее неизвестны, так как зависят от длины проводов и колебаний температуры среды, в которой находятся провода.
Четырехпроводная схема измерения (рис. 2б) обеспечивает самые высокие характе- ристики по точности и стабильности измерения. Преимущество этого решения в том, что погрешность, вызываемая сопротивлениями проводов линий связи Rл1 и Rл2, через которые пропускается измерительный ток Iи, и их температурным дрейфом, устраняется полностью за счет измерения сигнала непосредственно на сопротивлении Rтс через провода линий связи с сопротивлениями Rл3 и Rл4, не участвующие в пропускании измерительного тока Iи. По этим проводам из-за высокого входного сопротивления измерителя не протекает ток, и, следовательно, на них нет падения напряжения, поэтому напряжение на выходе измерителя будет равно Uх = IиRтс. Однако в этом случае увеличение количества линий связи, используемых для подключения ТС к измерительным каналам ИМКТ, приводит к усложнению измерительных кабелей и их удорожанию.
Компромиссом между двух- и четырехпроводными схемами измерения являются трехпроводные схемы измерения, которые используют при желании снизить стоимость измерительных кабелей, подключаемых к измерительным каналам ИМКТ, при не слишком высоких требованиях к точности измерения сопротивлений ТС. В трехпроводной конфигурации возможна автокомпенсация сопротивлений двух проводов, через которые пропускают измерительный ток I и , при проведении измерений падения напряжений между тремя поводами в предположении, что сопротивления двух проводов, участвующих в автокомпенсации, одинаковые. При этом автокомпенсация может осуществляться различными способами, зависящими от выбранных участков измерения падения напряжений и от количества (одного или двух) используемых в схеме измерения (рис. 3) источников измерительного тока [2; 3].
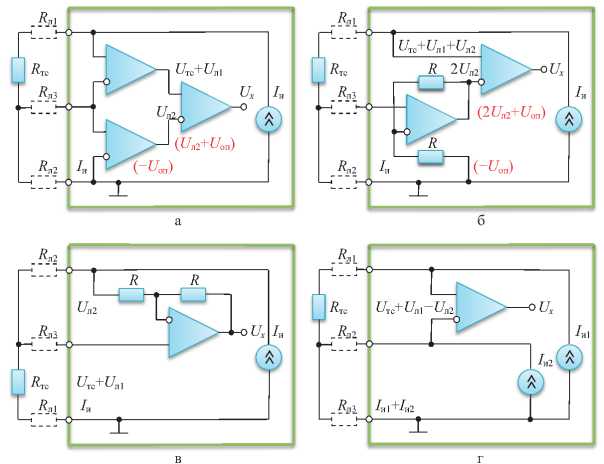
Рис. 3. Варианты трехпроводной схемы измерения сопротивления ТС с одним источником измерительного тока (а), (б), (в) и с двумя источниками измерительного тока (г)
АППАРАТЫ И
ТЕХНОЛОГИИ
В вариантах трехпроводных схем измерения с одним источником измерительного тока (рис. 3а, 3б, 3в) автокомпенсация сопротивлений проводов линий связи R л1 и R л2 , через которые пропускают измерительный ток I и , осуществляется путем проведения двух измерений падения напряжений между проводами линий связи на различных участках. Во всех вариантах сопротивление провода третьей линии связи R л3 не вносит погрешность, так как через него из-за высокого входного сопротивления измерителей ток не протекает и не создает падения напряжения.
-
176 В первом варианте трехпроводной схемы из
мерения с одним источником измерительного тока (рис. 3а) автокомпенсация осуществляется путем проведения двух измерений падений напряжений между проводами линий связи относительно провода третьей линии связи и определения их разности. Первым (основным) измерителем контролируется на сопротивлениях R тс и R л1 суммарное падение напряжения U тс + U л1 = I и ( R тс + R л1 ), вторым (вспомогательным) измерителем контролируется на сопротивлении R л2 падение напряжения U л2 = I и R л2 , которое используется для компенсации, а с помощью третьего (компенсирующего) измерителя определяется их разность, в результате на его выходе напряжение составит Uх = I и R тс + I и ( R л1 - R л2 ). Ошибка измерения сопротивления ТС для этого варианта схемы будет равна ∆ R ош = R л1 - R л2 .
Во втором варианте трехпроводной схемы измерения с одним источником измерительного тока (рис. 3б) автокомпенсация осуществляется путем проведения двух измерений падений напряжений между проводами линий связи относительно провода второй линии связи и определения их разности. Первым входом измерителя контролируется на сопротивлениях R тс , R л1 , R л2 суммарное падение напряжения U тс + U л1 + U л2 = I и ( R тс + R л1 + R л2 ), а вторым его входом контролируется удвоенное вспомогательным усилителем на сопротивлении R л2 падение напряжения 2 U л2 = 2 I и R л2 , которое используется для компенсации, в результате на выходе измерителя напряжение будет равно их разности Uх = I и R тс + I и ( R л1 - R л2 ). Ошибка измерения сопротивления ТС для этого варианта схемы также составит ∆ R ош = R л1 - R л2 .
Такие же результаты по точности измерения дает более простой в реализации третий вариант трехпроводной схемы измерения с одним источником измерительного тока (рис. 3в), в котором автокомпенсация осуществляется, также как и в первом варианте, путем проведения двух измерений между проводами линий связи относительно провода третьей линии связи и определения их разности, но при смене полярности подключения проводов первой и второй линии связи к источнику измерительного тока. В такой схеме функции контроля напряжений и компенсации падения на-
Том 3 пряжения на проводах линий связи реализуются в одном суммирующем усилителе, по неинвертирующему входу которого измеряется на сопротивлениях R тс и R л1 сумма падений напряжений ( U тс + U л1 ) = I и ( R тс + R л1 ), а по инвертирующему входу измеряется на сопротивлении R л2 падение напряжения U л2 = I и R л2 . На выходе суммирующего усилителя напряжение, как в предыдущем варианте схемы, будет равно (при условии R >> R тс ) их разности Uх = I и R тс + I и ( R л1 - R л2 ), то есть ошибка измерения сопротивления ТС и для этого варианта схемы составит ∆ R ош = R л1 - R л2 .
Аналогичные результаты по точности измерения дает и трехпроводная схема измерения с двумя источниками измерительного тока, в которой автокомпенсация сопротивлений проводов линий связи R л1 и R л2 осуществляется путем проведения одного измерения между проводами первой и второй линии связи (рис. 3г), через которые для получения компенсирующего напряжения пропускают одинаковые измерительные токи I и1 и I и2 от отдельных источников тока. Такая схема реализуется наиболее просто, если в канале аналого-цифрового преобразования использовать современные АЦП с двумя встроенными цифроуправляемыми источниками тока. Ошибка в измерении сопротивления R тс в такой схеме будет зависеть только от разности падений напряжений на сопротивлениях проводов первой и второй линий связи ∆ U л = U л1 - U л2 = I и1 R л1 - I и2 R л2 , так как сопротивление провода третьей линии связи R л3 , через которую протекает сумма измерительных токов I и1 + I и2 , не влияет на результат измерения. Если не обеспечено равенство измерительных токов I и1 и I и2 , то по точности измерения эта схема измерения будет уступать предыдущим вариантам схемы, но при обеспечении равенства измерительных токов I и1 = I и2 = I и напряжение на выходе измерителя будет равно Uх = I и R тс + I и ( R л1 - R л2 ) и ошибка измерения сопротивления ТС также составит ∆ R ош = R л1 - R л2 .
Во всех рассмотренных вариантах трехпроводных схем измерения выходное напряжение Uх будет точно соответствовать напряжению U тс на сопротивлении R тс и ошибки измерения не будет если сопротивления проводов линий связи R л1 и R л2 (включая электрическое сопротивление любых соединений в контуре измерений) будут одинаковы. Однако любая разница в сопротивлении этих проводов тут же скажется на точности измерений.
Таким образом, трехпроводная схема измерения уменьшает по сравнению с четырехпроводной схемой стоимость соединения (за счет экономии кабельной продукции), однако использование такой схемы во всех вариантах ее реализации отрицательно сказывается на точности измерений.
Следует отметить, что при практической реализации в первом и втором вариантах трехпроводной схемы измерения с одним источником изме- рительного тока (рис. 3а, 3б) имеется возможность настройки диапазона измерения сопротивления ТС путем введения в схему вспомогательного измерителя (усилителя) относительно общей шины источника калиброванного опорного напряжения Uоп отрицательной полярности, обеспечивающего компенсацию выходного напряжения Uх при задании нижней границы диапазона измерения. Величина опорного напряжения Uоп при линейной аппроксимации номинальной статической характеристики ТС Rтс(t) = R0(1+αt) при заданном измерительном токе Iи может быть определена из соотношения Uоп = IиR0(1+αtmin), где tmin – нижняя граница температурного диапазона.
Следует также отметить, что при практической реализации часто отдают предпочтение трехпроводной схеме измерения с двумя источниками тока (рис. 3г), так как в ней, как и в четырехпроводной схеме измерения (рис. 2б), имеются дополнительные возможности повышения точности и стабильности измерений за счет включения в цепь протекания измерительного тока резистора, обеспечивающего смещение уровня сигнала относительно общей шины для более эффективного подавления мощных синфазных помех и создание дифференциального источника опорного напряжения на АЦП для компенсации любых флуктуаций величины измерительного тока. Примеры практической реализации этих вариантов схем измерения для метода непосредственной оценки с описанием различных способов повышения точности измерения достаточно подробно описаны в ряде работ, например [4; 5]. Эти варианты схем измерения широко используются в измерительных преобразователях промышленного назначения [6].
Применение метода сравнения с мерой
Необходимость применения метода сравнения с мерой в схемах измерения многоканального ИМКТ возникает в том случае, когда требуется измерять отклонение сопротивления ТС от опорного сопротивления в зависимости от изменения температуры ∆ R тс ( t ) в узком диапазоне, при котором изменение отклонения сопротивления ∆ R тс значительно меньше его номинального значения R 0 при 0 °С. При этом в измерительных каналах максимально измеряемое значение отклонения сопротивления ∆ R тс от опорного сопротивления согласовывают с полной шкалой АЦП, начало отсчета которой соответствует опорному сопротивлению, определяющему начальную точку температурной шкалы. В этом случае проблема получения высокой разрешающей способности преобразования отклонения сопротивления ∆ R тс в цифровой эквивалент Y ∆тс , необходимой для обеспечения с высокой точности и стабильности измерения, связанная с использованием АЦП с повышенной разрядностью, становится второстепенной.
Этот метод может применяться только в двух- и трехпроводных вариантах схем измерения отклонения сопротивления ТС от опорного сопротивления, так как четырехпроводная схема предназначена только для измерения сигнала непосредственно на сопротивлении ТС. Использование двухпроводной схемы измерения, так же как и при применении метода непосредственной оценки, ограничено допустимой длиной проводов линий из-за влияния их сопротивлений на точность и стабильность измерения. Для обеспечения высокой точности и стабильности измерения в этом случае предпочитают использовать трехпроводные схемы измерения, поскольку они по сравнению с двухпроводными схемами позволяют компенсировать влияние сопротивлений проводов линий связи на погрешность измерения.
В двухпроводной схеме измерения (схема не показана, так как является частным случаем трехпроводной схемы) ошибка измерения, вызванная сопротивлениями проводов линий связи R л1 и R л2 , составит ∆ R ош = R л1 + R л2 . Поэтому при прецизионных измерениях для такой схемы длина пары проводов не должна превышать 0,2 м. Измерительные кабели, используемые для подключения к измерительным каналам ИМКТ, имеют длину несколько метров, поэтому при применении метода сравнения с мерой двухпроводные схемы измерения в ИМКТ не используют.
Трехпроводная схема измерения позволяет уменьшить погрешность, вносимую сопротивлениями проводов линий связи R л1 и R л2 , более чем на порядок, то есть при тех же требованиях по точности измерения может использоваться с длиной пары проводов линий связи ТС не менее 2 м, и может быть реализована как с одним, так и с двумя источниками измерительного тока (рис. 4). В обоих случаях для обеспечения компенсации погрешности измерения при подключении ТС к схеме измерения сопротивление R л1 прибавляется к сопротивлению R тс , а сопротивление R л2 – к опорному сопротивлению R оп , и производится только одно измерение дифференциальной составляющей падений напряжений на этих цепях.
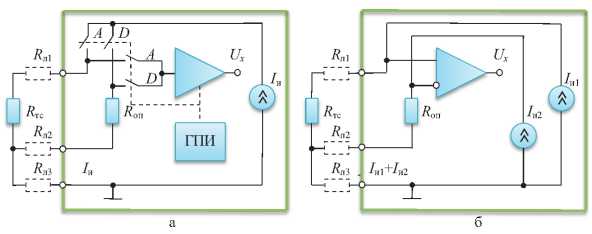
Рис. 4. Трехпроводная схема измерения отклонения сопротивления ТС от опорного сопротивления с одним (а) и двумя (б) источниками измерительного тока
АППАРАТЫ И
ТЕХНОЛОГИИ трехпроводной схеме измерения с одним источником измерительного тока (рис. 4а) с помощью коммутаторов A и D под управлением генератора прямоугольных импульсов (ГПИ) обеспечивается поочередное переключение измерительного тока Iи к цепи из последовательно соединенных сопротивлений Rтс, Rл1, Rл3, на которых контролируется сумма падений напряжений Uтс+Uл1+Uл3 = Iи(Rтс+Rл1+Rл3), и к цепи из последовательно соединенных сопротивлений Rоп, Rл2, Rл3, на которых контролируется сумма падений напряжений Uоп+Uл2+Uл3 = Iи(Rоп+Rл2+Rл3), а так-178 же модуляция и детектирование дифференциальной составляющей падений напряжений, при этом на выходе детектора определяется разность этих напряжений Uх = Iи(Rтс-Rоп)+Iи(Rл1-Rл2). Отсюда видно, что сопротивление Rл3, через которое замыкается измерительный ток Iи на общую шину, не влияет на результаты измерения, а ошибка измерения отклонения сопротивления Rтс от опорного Rоп для этой схемы составит ∆Rош = Rл1-Rл2. Таким образом, эта схема позволяет обеспечить повышенную точность измерения, так как в коммутируемых цепях протекает один и тот же измерительный ток Iи и не создает составляющую погрешности, которая могла бы возникнуть за счет разности токов в контурах измерения, однако такая схема сложна в реализации [7].
Трехпроводная схема измерения с двумя источниками измерительного тока (рис. 4б) значительно проще в реализации, но несколько уступает по точности измерения, так как не удается обеспечить идеального равенства измерительных токов I и1 = I и2 = I и , протекающих через сопротивление R тс и опорное сопротивление R оп . В этой схеме измерительный ток I и1 создает на сопротивлениях R тс и R л1 падение напряжения U тс + U л1 = I и1 ( R тс + R л1 ), а измерительный ток I и2 создает на сопротивлениях R оп и R л2 падение напряжения U оп + U л2 = I и2 ( R оп + R л2 ), при этом на выходе измерителя определяется разность этих напряжений U х = ( I и1 R тс - I и2 R оп ) + ( I и1 R л1 - I и2 R л2 ). Отсюда видно, что сопротивление R л3 , через которое замыкается суммарный измерительный ток I и1 + I и2 на общую шину, не влияет на результаты измерения. При равенстве измерительных токов I и1 = I и2 = I и разность этих напряжений будет равна Uх = I и ( R тс - R оп )+ I и ( R л1 - R л2 ), то есть ошибка измерения, как и в предыдущей схеме, составит ∆ R ош = R л1 - R л2 .
Таким образом, в рассмотренных трехпроводных схемах измерения отклонения сопротивления ТС от опорного полная компенсация сопротивлений проводов линий связи достигается также при R л1 = R л2 , при которой результат измерения будет определяться только температурой ТС. Однако в реальности из-за отклонений в процессе изготовления проводов, неравенства длин, незатя-
Том 3
нутых соединений, деформационного упрочнения вследствие изгиба и термической коррозии всегда имеется некоторая разница между сопротивлениями R л1 и R л2 , приводящая к ошибке измерения.
Следует отметить, что ошибка измерения в любых трехпроводных схемах из-за неравенства сопротивлений проводов линий связи вероятнее всего будет меняться со временем неожиданно и непредсказуемо из-за увеличения коррозии, изменений температуры, влажности и т.д. Это накладывает ограничение на используемые измерительные кабели. В случае необходимости проведения прецизионных измерений для подключения ТС необходимо использовать инструментальные кабели, специально разработанные для данных целей.
Использование в схемах измерения имитаторов выходной электрической величины термопреобразователей сопротивления
Реальные измерительные характеристики схем измерения, используемых в измерительных каналах ИМКТ, могут иметь некоторые отклонения от идеальных, которые влияют на точность и стабильность измерения. Эти отклонения связаны с технологическим разбросом параметров используемых в схемах измерения элементов и влиянием на них различных эксплуатационных факторов, приводящих к смещению измерительной характеристики и изменению ее наклона. Смещение и дрейф в усилении, происходящие в результате изменений температуры, процессов старения и изменений питания, являются причинами неопределенностей в измерениях. Зачастую такие неопределенности являются неприемлемыми.
Однако эти отклонения в пределах заданного цикла измерений носят систематический характер, и вызванная ими погрешность измерения может быть устранена путем автоматической калибровки программными средствами ЦПМ. Условиями для этого является:
-
• наличие в схеме измерения прецизионных (устойчивых к изменению условий эксплуатации) имитаторов выходной электрической величины ТС, позволяющих производить контрольные измерения по мерам М н и М в в двух (верхней и нижней) калибровочных точках измерительной характеристики;
-
• линейность измерительной характеристики, которая должна быть обеспечена в измерительном канале ИМКТ с точностью до погрешности квантования АЦП.
Принцип проведения автокалибровки основан на непрерывной или периодической калибровке погрешности измерения в измерительном канале, использующемся для измерения текущего напряжения на опрашиваемом ТС при сравнении с результатами измерения напряжений на извест- ных мерах Мн и Мв имитаторов выходной электрической величины ТС (либо на калибровочных источниках напряжения, либо на калибровочных сопротивлениях) в двух (нижней и верхней) калибровочных точках, определенных для заданного рабочего диапазона измерения [8].
В заданном цикле измерений автокалибровка в измерительных каналах ИМКТ (рис. 1) производится в три шага:
-
• сначала производится измерение напряжения в нижней калибровочной точке U кн на известной мере М н , усиление вместе с входным напряжением смещения с помощью нормирующего усилителя и фиксация цифрового эквивалента Y кн с помощью АЦП и УСЦД;
-
• затем измерение напряжения в верхней калибровочной точке U кв на известной мере М в , усиление вместе с входным напряжением смещения с помощью нормирующего усилителя и фиксация цифрового эквивалента Y кв с помощью АЦП и УСЦД;
-
• потом измерение напряжения в текущей точке контроля Ux на сопротивлении ТС, усиление вместе с входным напряжением смещения с помощью нормирующего усилителя и фиксация цифрового эквивалента Yx с помощью АЦП и УСЦД.
Используя результаты трех измерений, полученных в измерительном цикле и сохраненных в УСЦД, определяется с помощью программных средств ЦПМ по внесенным в память калибровочным значениям U кн и U кв известных мер М н и М в неизвестное значение напряжения на контролируемом сопротивлении ТС.
Действительно, в общем случае цифровой эквивалент измеряемого напряжения на выходе АЦП, имеющего коэффициент преобразования K п (зависит от его разрядности и номинального значения напряжения полной шкалы), определяется отклонением реальной измерительной характеристики от идеальной и может быть получен с некоторой погрешностью вследствие начального смещения E см на выходе нормирующего усилителя (аддитивная составляющая), отличия коэффициента усиления нормирующего усилителя K у от номинального (мультипликативная составляющая) и нелинейности измерительной характеристики (нелинейная составляющая). Если пренебречь последней из составляющих (линейность измерительного канала обеспечивается выбором соответствующей элементной базы), то получить результат с минимальной погрешностью возможно, измерив и преобразовав с помощью АЦП в цифровой эквивалент:
-
• напряжение в нижней калибровочной точке U кн , в которой Y кн = K п K у ( U кн + E см );
-
• напряжение в верхней калибровочной точке U кв , в которой Y кв = K п K у ( U кв + E см );
-
• напряжение в текущей точке контроля Ux , в которой Yx = K п K у ( Ux + E см ).
Первые две операции являются калибровочными, позволяющими автоматически программными средствами ЦПМ рассчитать (оценить) с точностью до погрешности квантования АЦП:
-
• коэффициент усиления:
{ K у } оц = ( Y кв - Y кн )/( U кв — U кн ) K п ;
-
• начальное смещение:
{ E см } оц = ( U кв Y кн — U кн Y кв )/( Y кв — Y кн );
-
• значение измеряемого напряжения:
{ U x } оц = U кн +[( U кв — U кн )( Y-Y кн )]/( Y кв — Y кн ).
Из последнего выражения видно, что напряжение Ux определяется по записанным в память ЦПМ значениям напряжений U кн и U кв известных мер М н и М в , влияние начального смещения E см и коэффициента усиления K у на результат расчета исключается. Погрешность измерения в этом случае будет определяться только технологическими отклонениями значений напряжений U кн и U кв известных мер М н и М в и погрешностью квантования АЦП. Однако следует отметить, что для уменьшения влияния ошибки квантования АЦП на точность автокалибровки значения напряжений U кн и U кв мер М н и М в , определяющие значения цифровых эквивалентов Y кн и Y кв , необходимо выбирать близкие к границам рабочего диапазона измерения с учетом возможных отклонений результатов измерений от номинальных значений.
При проектировании унифицированного многоканального ИМКТ необходимо учитывать, что автокалибровка в измерительных приборах производится в заданном цикле измерений в течение времени, ограниченном периодом обращения ЦПМ к ИМКТ, которое обычно варьируется в пределах 4-х секунд. В течение этого промежутка времени параметры схем измерения достаточно стабильны, поэтому нет необходимости проводить автокалибровку более часто. Параметры схем измерения (начальное смещение E см и коэффициент усиления K у ) изменяются особенно стремительно, если измерительный прибор подвержен температурным колебаниям. Это может быть при разогреве после включения питания или в случае изменения температурного режима в процессе испытаний или штатной эксплуатации. Поэтому при определении периодичности автокалибровки необходимо учитывать скорость изменения температурного режима ИМКТ. Кроме того, необходимо учитывать, что меры М н и М в имитаторов выходной электрической величины ТС в процессе эксплуатации также подвержены воздействиям различных эксплуатационных факторов и к ним предъявляются дополнительные требования по обеспечению долговременной стабильности в течение всего срока эксплуатации.
Рассмотрим использование имитаторов выходной электрической величины ТС с двумя ме-

Том 3
рами М н и М в на примере трехпроводных схем измерения с одним и двумя источниками измерительного тока, в основу которых положен метод сравнения с мерой (рис. 4). В этом случае в качестве значений мер М н и М в выходной электрической величины ТС, заносимых в память ЦПМ, необходимо использовать для нижней и верхней калибровочных точек сопротивления R кн и R кв , которые должны быть включены параллельно опорному сопротивлению R оп через коммутаторы калибровочных каналов.
В трехпроводной схеме измерения с одним 180 источником измерительного тока калибровочные сопротивления R кн и R кв (рис. 5) подключаются к общему источнику измерительного тока I и параллельно опорному сопротивлению R оп по сигналам СУ с помощью дополнительных коммутаторов B и C [9].
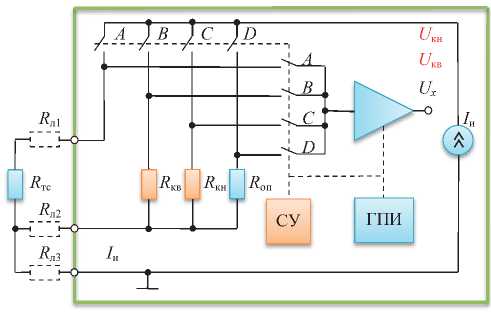
Рис. 5. Трехпроводная схема измерения отклонения сопротивления ТС от опорного сопротивления с одним источником тока и двумя калибровочными сопротивлениями
В этой схеме производится измерение трех дифференциальных составляющих напряжений на контролируемых сопротивлениях R кн , R кв и R тс относительно опорного сопротивления R оп при опросе одним и тем же измерительным током I и и дает результаты:
-
• в нижней калибровочной точке:
U кн = I и ( R кн - R оп );
-
• в верхней калибровочной точке:
U кв = I и ( R кв - R оп );
-
• в текущей точке контроля сопротивления ТС U х = I и ( R тс - R оп )+ I и ( R л1 - R л2 ), или U х = I и ∆ R тс + I и ∆ R лс .
При замене в последнем соотношении измеряемых параметров Uх и ∆ R тс на их оценки можно рассчитать (оценить) измеряемое отклонение сопротивления ТС от опорного {∆ R тс } оц = { Ux } оц / I и -∆ R лс . При отсутствии составляющей ошибки, вызванной сопротивлениями линий связи, для расчета (оценки) можно воспользоваться выражением {∆ R тс } оц = ( R кн – R оп )+[( R кв – R кн )( Yx – Y кн )]/( Y кв – Y кн ), из которого видно, что влияние измерительного тока
I и на результат расчета исключается с точностью до погрешности квантования АЦП.
В трехпроводной схеме измерения с двумя источниками измерительного тока калибровочные сопротивления R кн и R кв (рис. 6) подключаются к первому источнику измерительного тока I и1 по сигналам СУ с помощью дополнительных коммутаторов B и C , второй источник измерительного тока I и2 подключен к опорному сопротивлению R оп без коммутации.
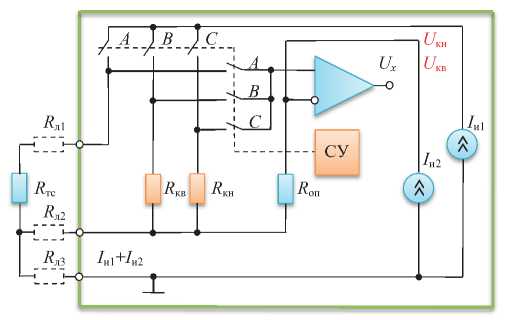
Рис. 6. Трехпроводная схема измерения отклонения сопротивления ТС от опорного сопротивления с двумя источниками тока и двумя калибровочными сопротивлениями
В такой схеме производится измерение трех дифференциальных составляющих напряжений на контролируемых сопротивлениях R кн , R кв и R тс относительно опорного напряжения на сопротивлении R оп при опросе разными измерительными током I и1 и I и2 и дает результаты:
-
• в нижней калибровочной точке:
U кн = I и1 R кн - I и2 R оп ;
-
• в верхней калибровочной точке:
U кв = I и1 R кв - I и2 R оп ;
-
• в текущей точке контроля сопротивления ТС U х = ( I и1 R тс - I и2 R оп )+( I и1 R л1 - I и2 R л2 ), или U х = I и ( R тс - R оп )+ I и ( R л1 - R л2 ) при обеспечении равенства измерительных токов I и1 = I и2 = I и , что совпадает с результатами для предыдущей схемы измерения и позволяет пользоваться в расчетах для этой схемы такими же оценками.
Следует обратить внимание, что в рассмотренных вариантах схем измерений разность калибровочных сопротивлений ∆Rкв = (Rкв–Rкн) при проведении оценки отклонения сопротивления {∆Rтс}оц для узкого диапазона измерения может дать большую погрешность, так как в этом случае технологический разброс номиналов резисторов калибровочных сопротивлений Rкв и Rкн может оказаться соизмерим с требуемой величиной их разности. Поэтому при практической реализации схем измерения для формирования калибровочных напряжений предпочтительнее использовать последовательное включение сопротивлений Rкн и ∆Rкв, дающее лучшие результаты по точности измерения, при котором Rкв = Rкн+∆Rкв (рис. 7). В этом случае делитель из калибровочных сопротивлений Rкн и ∆Rкв подключается к источнику измерительного тока Iи по сигналам СУ с помощью коммутаторов B+C.
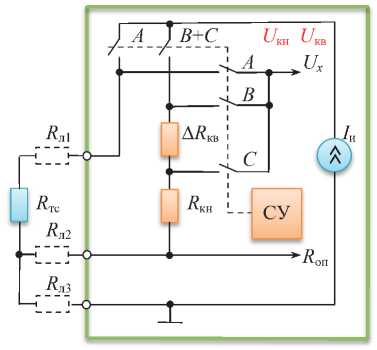
Рис. 7. Фрагмент трехпроводной схемы измерения отклонения сопротивления ТС от опорного сопротивления с последовательным включением калибровочных сопротивлений
Таким образом, в рассмотренных вариантах трехпроводных схем измерения, в основу построения которых положен метод сравнения с мерой, погрешность измерения, вносимая измерительным каналом, может быть уменьшена путем проведения автокалибровки по двум калибровочным сопротивлениям до величины их погрешности с учетом погрешности квантования АЦП. При этом схема последовательного включения калибровочных сопротивлений дает лучшие результаты по точности измерения. Эта схема проста в реализации и легко адаптируется в многоканальный вариант схемы измерения [10; 11].
Модернизация схем измерения для компенсации погрешности нелинейности термопреобразователей сопротивления
Для обеспечения возможности контроля температуры на отдельных элементах конструкции КА в различных поддиапазонах для уменьшения влияния нелинейности номинальных статических характеристик ТС на погрешность измерения возникает необходимость их кусочно-линейной аппроксимации. В этом случае в схемы измерения сопротивления ТС многоканального ИМКТ для обеспечения возможности проведения автокалибровки в отдельных поддиапазонах потребуется ввести многозначную меру Мн, Мпi, Мв имитатора выходной электрической величины ТС, где Мпi – промежуточные меры, i – количество добавленных поддиапазонов, которые определяют помимо граничных калибровочных точек Uкн и Uкв допол- нительные промежуточные калибровочные точки Uкпi, разбивающие общий диапазон измерения на поддиапазоны [8].
Однако такое решение приводит к дополнительным аппаратным затратам в схеме измерения и усложнению программного обеспечения ЦПМ, поэтому при оптимизации структуры унифицированного многоканального ИМКТ необходимо определить достаточное количество промежуточных калибровочных точек. В условиях эксплуатации КА в диапазоне температур от -10 °С до +40 °С приемлемые результаты по повышению точности измерения дает введение одной промежуточной точки U кп , разбивающей общий диапазон на два поддиапазона. В этом случае для обеспечения проведения автокалибровок в двух поддиапазонах потребуется модернизация схем измерения с минимальными дополнительными аппаратными затратами. Для рассмотренного варианта схемы измерения с использованием делителя из калибровочных сопротивлений R кн и ∆ R кв (рис. 7) потребуется наиболее простая модернизация. Для этого достаточно ввести в цепь делителя промежуточное калибровочное сопротивление ∆ R кп с дополнительными цепями коммутации для проведения измерения.
Заключение
Проведенный анализ общих требований к структуре многоканального ИМКТ и различных вариантов построения схем измерения сопротивлений ТС показал, что при оптимизации структуры унифицированного многоканального ИМКТ следует учитывать особенности их построения:
-
• для измерения температур в широком диапазоне предпочтительнее использовать трех- или четырехпроводные схемы измерения, основанные на применении метода непосредственной оценки;
-
• для измерения температур в узком диапазоне предпочтительнее использовать трехпроводные схемы измерения, основанные на применении метода сравнения с мерой;
-
• для обеспечения согласования измерительных каналов, имеющих различные диапазоны измерения, с АЦП необходимо использовать нормирующий усилитель с автоматически изменяемым коэффициентом усиления;
-
• для уменьшения погрешности измерения, вносимой линиями связи измерительных кабелей, необходимо использовать схемы измерения, обеспечивающие автокомпенсацию сопротивлений проводов линий связи, с учетом ограничений к их длине в зависимости от значения номинального сопротивления ТС;
-
• для уменьшения погрешности измерения, вносимой измерительным каналом, необходимо в схемы измерения включать имитаторы выходной электрической величины ТС, обеспечивающие


проведение автокалибровок по двум мерам, при этом, если требуется уменьшить влияние нелиней- ности номинальных статических характеристик ТС на точность измерения, необходимо использовать схемы измерения, обеспечивающие проведение автокалибровок по многозначной мере.
Том 3
Рассмотренные варианты трехпроводных схем измерения, в основу построения которых положен метод сравнения с мерой, широко используются в многоканальных ИМКТ, разработанных для измерительных приборов КА серии «Глонасс-К» и других КА различного назначения.
Список литературы Оптимизация структуры унифицированного многоканального интерфейсного модуля контроля температур для измерительных приборов космических аппаратов
- Горностаев А. И. Проблемы унификации многоканального интерфейсного модуля контроля температур для измерительных приборов космических аппаратов // Космические аппараты и технологии. 2019. Т. 3. № 1. С. 41–51. doi: 10.26732/2618-7957-2019-1-47-57
- Денисенко В. Термопреобразователи сопротивления // Современные технологии автоматизации. 2014. № 1. С. 98–101.
- Теория измерений и контроля температуры [Электронный ресурс]. URL: https://sibcontrols.com/ru/tjeorija_izmjerjenij_i_kontrolja_tjempjeratury (дата обращения: 15.07.2019).
- Андрусевич А, Губа А. Термометры сопротивления: от теории к практике // Компоненты и технологии. 2011. № 7. С. 61–66.
- О`Грэди А. Методы возбуждения измерительных датчиков и применение ИС AD7711 и AD7730 // Компоненты и технологии. 2003. № 3. С. 50–55.
- Измерительные преобразователи температуры. Виды, устройство, монтаж, диагностика, функции преобразователя температуры [Электронный ресурс]. URL: http://www.eti.su/articles/izmeritelnaya-tehnika/izmeritelnayatehnika_1516.html (дата обращения: 15.07.2019).
- Михеев П. В., Михеева Е. П. Устройство для измерения температуры. Пат. № 2447412, Российская Федерация, 2012, бюл. № 10.
- Вилоп Л. Э. Автокалибровка измерительного канала по входу канала преобразования электрических величин // Вестник Самарского государственного аэрокосмического университета. 2012. № 7. С. 54–58.
- Михеев П. В., Кузуб Е. П. Устройство для измерения температуры. Пат. № 2492436, Российская Федерация, 2013, бюл. № 25.
- Михеев П. В., Школьный В. Н., Кузуб Е. П. Многоканальное устройство для измерения температуры. Пат. № 2526195, Российская Федерация, 2014, бюл. № 23.
- Горностаев А. И., Даныкин В. А. Интерфейсный модуль контроля температур. Пат. № 2562749, Российская Федерация, 2015, бюл. № 25.
