Оптимизация углового шага сканирования пространства

Автор: Сикора Евгений Александрович, Сотников Николай Николаевич, Мухин Дмитрий Сергеевич, Федоров Владислав Викторович
Журнал: Проблемы информатики @problem-info
Рубрика: Средства и системы обработки и анализа данных
Статья в выпуске: 5 (17), 2012 года.
Бесплатный доступ
Разработана методика оценки углового шага оптимального сканирования пространства роботом при заданных параметрах движения. Выявлен критерий оптимальности сканирования пространства для ориентации робота. Оценены размеры "слепых" зон, возникающих при сканировании пространства и обусловленных движением робота. Установлены математические зависимости для расчета оптимального углового шага сканирования пространства.
Управление, движение органов управления, сканирование пространства, сонар
Короткий адрес: https://sciup.org/14320176
IDR: 14320176 | УДК: 62-512
Текст научной статьи Оптимизация углового шага сканирования пространства
В настоящее время во многих областях науки, техники и медицины возможности традиционных роботов ограничены. Перспективным является применение автономных роботов-манипуляторов, например для контроля трубопроводов атомных электростанций изнутри труб [1].
Обеспечение автономности функционирования роботов достигается за счет применения специализированных следящих систем управления, в обязательном порядке включающих датчики, от правильной настройки которых зависят быстродействие, эффективность и разрешающая способность этих систем. В наибольшей степени это относится к бесконтактным датчикам типа энкодеров, сонаров и индуктивных датчиков положения.
Существует несколько технологий ориентирования роботов в пространстве [2], которые можно условно разделить на два типа: контактные и бесконтактные. Первые подразумевают наличие механического устройства - "щупа" или "бампера", с помощью которого формируется информация о положении препятствий, вторые - лазерные или ультразвуковые датчики, заменяющие механический "щуп". Преимуществом ультразвуковых датчиков (сонаров) является возможность сканирования тел с внутренней структурой или тел, находящихся в однородной среде. При этом следует отметить, что сонары крайне чувствительны к различного рода шумам и могут реагировать на погодные явления, звуковые волны, создаваемые другим оборудованием, кондиционерами или даже флюоресцентными лампами.
Сонары входят в состав сканирующих устройств, которые воспринимают информацию о препятствиях в ультразвуковом виде, в том числе в условиях отсутствия освещения, и сначала преобразуют ее в электрическую форму, а затем - к цифровому виду, пригодному для обработ ки контроллером.
Очевидная актуальность оптимизации параметров сканирующего движения заключается в повышении эффективности использования рабочего времени робота и экономии заряда аккумуляторной батареи.
Основной причиной оптимизации является чрезмерное сканирование, которое возможно в двух случаях: 1) проведение сканирования пространства с очень малым шагом в отсутствие препятствий в зоне чувствительности сонара; 2) наличие перед роботом препятствий, которые сканируются с недостаточно большим шагом, не соответствующим размерам препятствий [3].
Последствия чрезмерного сканирования вследствие использования постоянной или неправильной величины шага заключаются в том, что результаты не дают правильного представления о пространстве. В общем случае выявляются относительно крупные препятствия, при этом существенно уменьшается скорость маневрирования.
Целью настоящей работы является создание методики оценки углового шага оптимального сканирования пространства роботом при заданных параметрах движения.
Для достижения поставленной цели требовалось решить следующие задачи:
-
1) сформировать критерий оптимальности сканирования пространства для ориентации робота;
-
2) оценить размеры "слепых" зон, возникающих при сканировании пространства и обусловленных движением робота;
-
3) установить математические зависимости для расчета оптимального углового шага скани
рования пространства.
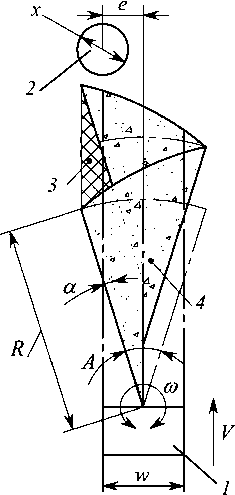
Рис. 1. Зоны работы сканирующего механизма: 1 - робот; 2 - препятствие; 3 - "слепая" зона;
4 - зона сканирования
"Слепые" зоны оказывают значительное влияние на корректное движение (движение без столкновений) в основном на поворотах. Поскольку сканирование проводится при движении робота, возникают "слепые" зоны, в которых сканирование недоступно (рис. 1).
При расчете оптимального углового шага, обеспечивающего качественное сканирование на краях зоны сканирования, должны быть выполнены следующие условия:
-
1. Угловой шаг должен быть кратным углу сканирования, чтобы выполнялось условие равномерности сканирования:
-
2. Если препятствие находится строго перед роботом ( e < ( w — x )/2), то расстояние между двумя дальними точками сканирования должно быть меньше минимального размера препятствия: 180 ° x .
-
3. Если препятствие смещено относительно робота ( e > ( w — x ) / 2), то расстояние между
а =1 A, n = 1,2,3,..., n где а - угловой шаг сканирования, град; A -угол сканирования, град.
а <--min max л R
( a max — максимальный угловой шаг сканирования, град; x min - минимальный размер препятствия, мм; R - дальность действия сонара, м; w - ширина робота, мм).
двумя дальними точками сканирования должно определяться неравенством 180 ° ( A w А
O nax < ----1 COS- — — I .
-
л V 2 2 R J
Следовательно, угловой шаг сканирования необходимо рассчитывать согласно обобщенному условию а =1 А, n = 1,2,3. n
180° 8 Onax <----”, л R
где xmin, e - ( w x)' 2,
8 = <
„ Aw
R cos — , e > ( w — x )/2.
2 2
Для определения оптимального углового шага сканирования пространства, в пределах которого сосредоточена основная мощность сигнала, проведен спектральный анализ - быстрое преобразование Фурье, что позволило оценить основные и шумовые составляющие сигналов. Проведенный анализ показал, что при меньшем угле сканирования формируется широкополосный сигнал, при многократном отражении спектр такого сигнала меняется незначительно, основная частота стабильна, в отличие от частоты сигнала, полученного при использовании большего угла (рис. 2). Волновой канал сонара обладает собственной частотой, поэтому спек-
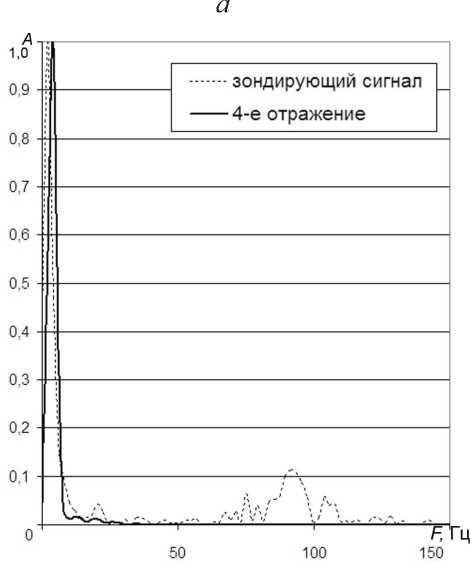
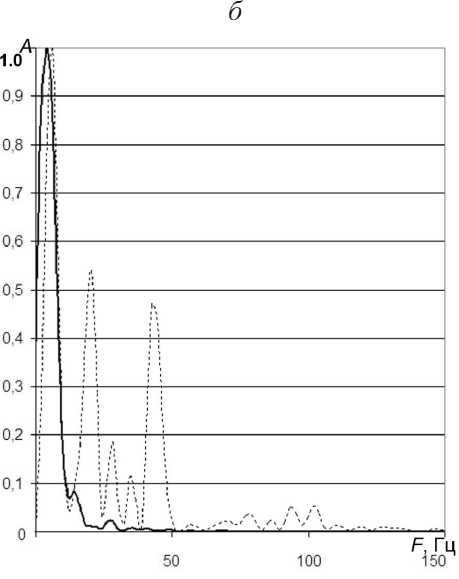
Рис. 2. Спектрограммы участков эхограмм, полученных при различных относительных углах сканирования пространства: а - 0,05 град/м; б - 0,1 град/м
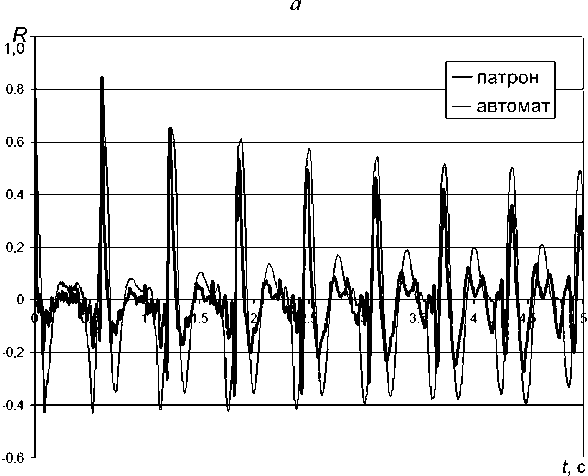
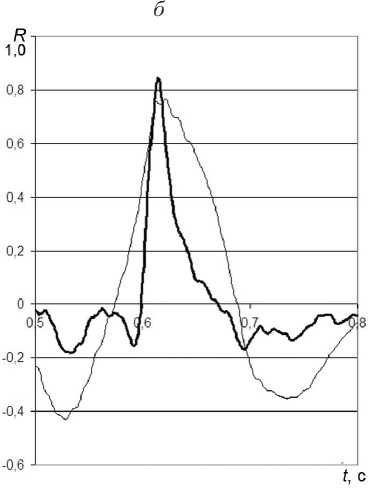
Рис. 3. Автокорреляционные функции эхограмм при различных относительных углах сканирования пространства:
а - 0 ^ 5 с; б - 0,5 ^ 0,8 с тры сигналов, распространяющихся в пространстве, трансформируются - энергетика перераспределяется, основная частота, близкая к собственной частоте сонара, изменяется: при 0,05 град/м - с 6 до 4 Гц; при 0,1 град/м - с 2 до 4 Гц. Остальные частоты в сигналах затухают, о чем можно судить по спектрам четвертых отражений.
Для оценки точности распознавания временного положения отражений проведен корреляционный анализ эхограмм (рис. 3). В ходе анализа установлено, что автокорреляционная функция эхограммы, полученной с помощью оптимизированного угла сканирования, компактнее, чем для эхограммы, полученной с помощью случайного "неоптимального" угла. Из сказанного выше следует, что применение для сканирования пространства оптимальных углов позволяет повысить точность временного распознавания препятствий.
Для оценки точности распознавания временных положений отражений от препятствия на эхограмме проведены измерения ширины главных максимумов на уровне R =0,7 [4]. Полученные данные представлены в табл. 1.
Таблица 1
Точность определения положения препятствия
|
Угол сканирования пространства |
Ширина максимумов автокорреляционной функции, с (погрешность определения положения препятствия, мм) |
||||
|
Отражение 1 |
Отражение 2 |
Отражение 3 |
Отражение 4 |
Отражение 5 |
|
|
Оптимальный |
0,013 |
0,025 |
0,036 |
0,035 |
0,033 |
|
(3,9) |
(7,5) |
(10,8) |
(10,5) |
(9,9) |
|
|
"Неоптимальный" |
0,049 |
0,066 |
0,069 |
0,067 |
0,065 |
|
(14,7) |
(19,8 ) |
(20,7) |
(20,1) |
(19,5) |
|
Таблица 2
|
Характеристика |
Оптимальный угол |
"Неоптимальный" угол |
|
Длительность сигнала, с |
0,10 |
0,35 |
|
Ширина спектра (диапазон частот), Гц |
46 (2 ^ 48) |
7 (1 ^ 8) |
|
База сигнала |
4,60 |
2,45 |
|
Динамический диапазон, Бел |
1,0987 |
1,2954 |
|
Объем сигнала |
5,05 |
3,17 |
|
Энергетические характеристики: |
||
|
мгновенная мощность |
600 |
770 |
|
средняя мощность |
50 |
20 |
|
энергия |
1245 |
8770 |
Расчетные и экспериментальные значения характеристик генерируемых сигналов при давлении 3 атм
Расчетные и экспериментальные значения характеристик генерируемых сигналов приведены в табл. 2 [5], из которой следует, что оптимальный сигнал является более информативным, обладает большей шириной спектра, базой и объемом при условии, что его энергия на порядок ниже.
Результаты проведенных исследований позволяют сделать следующие выводы. Сигнал, полученный при оптимальном угле сканирования, обладает большей информативностью. Корреляционная функция настроенного сонара компактнее, вследствие чего все максимумы четко выделяются. Внедрение оптимизации углов в алгоритмы управления подвижными устройствами при управлении позволяет повысить точность позиционирования как минимум в два раза.
Список литературы Оптимизация углового шага сканирования пространства
- ВОЛКОМОРОВ С. В., КАРПЕНКО А. П., ЛЕЛЕТКО А. М. Оптимизация угловых и линейных размеров одно-и двухсекционного манипуляторов параллельной кинематики//Наука и образование. 2010. [Электрон. ресурс]. http://technomag.edu.ru/doc/154452.html.
- РИЧАРДСОН Р. Сканируя пространство//Экспресс-электроника. 2003. [Электрон. ресурс]. http://citforum.univ.kiev.ua/hardware/articles/3dscan/.
- ПАРДО Р. Разработка, тестирование и оптимизация торговых систем для биржевого трейдера. М.: Минакс, 2002.
- БАСКАКОВ С. И. Радиотехнические цепи и сигналы. М.: Высш. шк., 1988.
- БЕНДАТ ДЖ. Применение корреляционного и спектрального анализа/ДЖ. БЕНДАТ, А. ПИРСОЛ. М.: Мир, 1983.
