Оптимизация управления заграждающей функцией эхоподавляющих устройств

Автор: Шаврин С.С.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии телекоммуникаций
Статья в выпуске: 4 т.6, 2008 года.
Бесплатный доступ
Электрическое эхо в совокупности с другими эффектами, вызванными его некорректным подавлением, занимает в настоящее время лидирующие позиции в статистике претензий абонентов сетей связи к качеству телефонной передачи. Одним из главных эффектов некорректного подавления эхосигналов является наличие кратковременных выпадений речевых фрагментов, часто наблюдаемых при разговорах по эхозащищенным каналам и получивших название клиппирования речи
Короткий адрес: https://sciup.org/140191275
IDR: 140191275 | УДК: 621.395.664
Suppression control dynamic optimizing in echo control devices
Adaptation speed acceleration principles and echo control devices design conception are proposed to minimize speech clipping by nonlinear processor of echo cancellers. Recommendations for optimal suppression control dynamics obtaining high performance stability are suggested
Текст научной статьи Оптимизация управления заграждающей функцией эхоподавляющих устройств
Электрическое эхо в совокупности с другими эффектами, вызванными его некорректным подавлением, занимает в настоящее время лидирующие позиции в статистике претензий абонентов сетей связи к качеству телефонной передачи. Одним из главных эффектов некорректного подавления эхосигналов является наличие кратковременных выпадений речевых фрагментов, часто наблюдаемых при разговорах по эхозащищенным каналам и получивших название клиппирования речи.
Для борьбы с мешающим воздействием эффекта электрического эха станционное оборудование сетей связи и некоторые виды абонентских терминалов оснащаются эхоподавляющими устройствами (ЭПУ), использующими два основных механизма подавления эхосигналов – заграждающий и компенсационный.
Заграждающий механизм предполагает внесение значительного затухания в обратное направление передачи телефонного канала при передаче речи в прямом. Эхоподавляющие устройства, реализующие заграждающий принцип подавления эхосигналов, получили название эхозаградителей (ЭЗ); их характеристики регламентируются рекомендацией МСЭ-Т G.164 [1].
Компенсационный механизм реализует функции формирования копии эхосигнала на основе принимаемого в прямом направлении передачи полезного сигнала и ее вычитания из сигнала обратного направления. Компенсационный принцип в чистом виде далеко не всегда обеспечивает необходимую степень подавления эхосигналов, поэтому в ЭПУ компенсационного типа – эхоком-пенсаторах (ЭК) – он всегда дополняется заграждающей функцией, исполняемой нелинейным процессором [2].
Заграждающая функция активизируется при одностороннем разговоре в дальнем по отношению к говорящему абоненту ЭПУ; в режиме встречногоразговораэтафункция должнавыклю-чаться. Некорректное управление активностью заграждающей функции приводит к клиппированию речи, оказывающему весьма значительное мешающее воздействие.
Настоящая статья посвящена проблеме снижения степени клиппирования речи эхоподавляющими устройствами и поиску путей ее решения.
Согласнотребованиямдействующихрегламен-тирующих документов, управление активностью заграждающей функции должно осуществляться в соответствии с ожидаемым уровнем эхосигна-ла. Выключение заграждающей функции должно производиться по превышению уровнем сигнала в тракте передачи ЭПУ, усредненным на интервале 2 мС, значения LS :
LR -ax -3 ≤ LS ≤ LR -ax
L – текущее значение уровня сигнала в трак- a x – значение адаптивно настраивающегося затухания, а ее активизация – с некоторым гистерезисом относительно значения L .
ax адаптивно настраивается в режиме подавления эхосигнала и в режиме покоя; на время встречного разгов ax обыч но останавливается. В режиме подавления эхо-ax адаптивно подстраивается к величине затухания эхотракта аЕ -9 < а, < аЕ -6 со скоростью Vпр > 4 дБ/С, называемой скоростью прямой адаптации. В режиме отсутствия сигналов в канале – ax сни жается до 0 дБ со скоростью Vобр > 4 дБ/С, назы- ваемой скоростью обратной адаптации. МСЭ-Т избегает конкретизации требования к значениям Vпр и Vобр, указывая, что скорости порядка 10 дБ/С могут считаться субъективно приемлемыми [1]. Как показывает опыт эксплуатации эхозащищенных каналов телефонной связи, это значение не может считаться оптимальным ни для Vпр, ни для Vобр. Задача снижения степени клиппирования речи эхоподавляющими устройствами может быть решена оптимизацией значений Vпр и Vобр по критерию максимальной субъективной абонентской оценки качества телефонной передачи.
Такое решение требует разработки механизма повышения скорости Vпр, обеспечивающего устойчивость и стабильность процесса адаптации, и проведение оптимизационных экспериментальных исследований. Предлагаемые принципы решения проблемы рассматриваются далее.
Отсутствие конкретных рекомендаций и формулировок по выбору значений Vпр и Vо отражает ограниченные возможности измерения a E в эксплуатационных условиях с необходимой точ-ностью.Оперативное измерение затухания эхотрак-
Вход тракта приема
Выход тракта передач
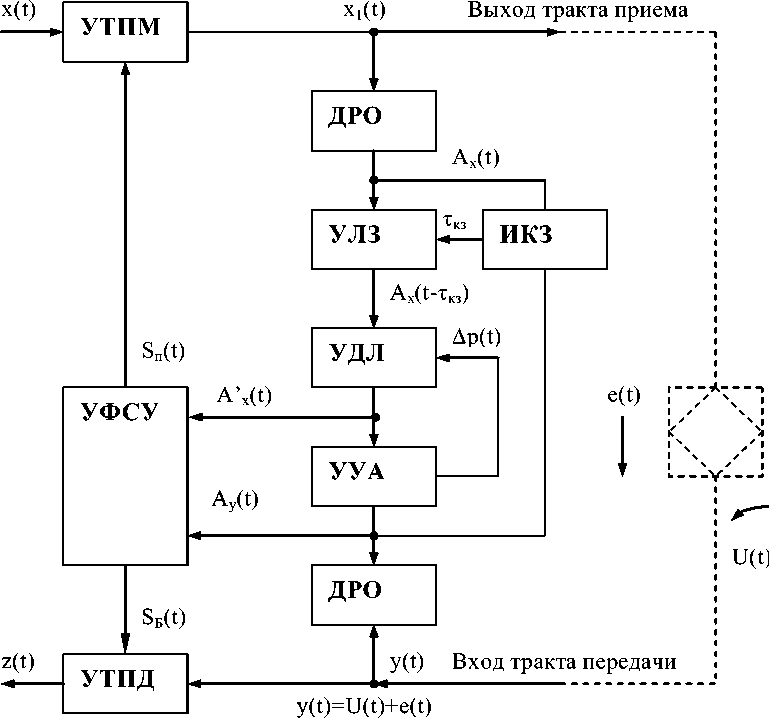
Рис. 1. Использование механизма ООС для адаптивного управления заграждающей функцией ЭПУ
та по речевому сигналу,не обладающему приемлемой степенью стационарности, предст весьма сложную задачу,усугубляемую влиянием шумов канала и концевой главных факторов,ограничивающим скорость Vпр, является наличие временного сдвига между эхосиг-налом и вызвавшим его сигналом прямого направления передачи в точках подключения ЭПУ, обусловленное концевой задержкой в эхо-тракте.
В качестве меры снижения влияния времени концевой задержки на точность измерения значения затухания эхо-тракта, обеспечивающей устойчивость и стабильность процесса адаптации при повышении скорости Vпр, предлагается решение, иллюстрируемое рис. 1. На рис. 1 приняты следующие обозначения: УТПМ – узел тракта приема; УТПД – узел тракта передачи; УФСУ – устройство формирования сигналов управления; ДРО – детектор речевой огибающей; УЛЗ – управляемая линия задержки; УДЛ – управляемый удлинитель; ИКЗ – измеритель времени концевой задержки; УУА – узел управления адаптацией.
В основу предлагаемого решения положен принцип компенсации временного сдвига между взвешенными огибающими сигнала в тракте приема ЭПУ и вызванного им эхосигнала, приведенной к точке принятия решения о режиме активности заграждающей функции и о режиме адаптации.
Функция компенсации временного сдвига реализуется с помощью УЛЗ, управляемой со стороны ИКЗ. Значение времени конц быть с необходимой точностью определено, например, по содержимому h – регистра [3], входящего в архитектуру ЭК. Предложенное решение обеспечивает устойчивость системы при использовании механизма отрицательной обратной связи для управления процессом адаптации через УУА.
Математическая модель, описывающая функционирование процесса адаптации в рамках предлагаемой концепции, может быть представлена в непрерывном времени следующей совокупностью выражений. Поскольку соединение узлов УТПМ, УТПД, УФСУ и ДРО является типичной для ЭЗ, его модель [4] может быть использована пи описании их взаим → о ействия.
Режим работы ЭЗ S (t) определяется значениями двоичных управляющих сигналов
S Б (t)
5 ( t ) = S n ( t ) ,
S о (t)
где S Б ( t ) - управляющий сигнал, устанавливающий режим «блокировка»; S П ( t ) - управляющий сигнал, устанавливающий режим «перебой»; S 0 ( t ) - сигнал, соответствующий пребыванию ЭЗ в режиме «покой». При этом единичное значение любого управляющего сигнала устанавливает ЭЗ в соответствующий режим и имеют место соотношения:
'SП (t) • SБ (t) = 0 ,
S П (t) • S 0 (t) = 0,
's Б (t) • S 0 (t) = 0,
_S П (t) + S 0 (t) + S Б (t) = 1.
8Б^ Sn(t ) формируются УФСУ по значениям сигналов Ax (t) и Ay (t ) с учетом режима ЭЗ в предшествующий момент времени и
X(0 y(t).
Сигнал S 0 (t ) будем далее рассматривать как разность: 50(0 = 1- Sn (t) - SE (t). Сигнал x1 (t ) на выходе тракта приема Э3 (на входе ДРО) может быть представлен в виде
X (t) = x(t){1 - S П (t ){L[x(t)] -1}}, (3)
где L [ x ( t )] - коэффициент передачи УТПД в режиме «перебой». На вход тракта передачи ЭЗ поступает сигнал y ( t ) :
y(t) = г (t) + U (t), где £(t) - эхо-сигнал; U(t) - сигнал со стороны ближнего по отношению к ЭЗ абонента;
xi(0 y(t) подаются на входы ДРО. В основу работы ДРО большинства известных типов ЭЗ положен принцип сравнения огибающих сигналов в прямом и обратном направлениях передачи телефонного канала, взвешенных согласно среднестатистической спектральной плотности телефонной речи. Взвешенные сигна- лы описываются выражениями:
t
x1 (t) = jx (т) • w(t -т) dT
-∞
t
y(t) = jУ(т) • wt -т)dT ,
-∞ где w(t) - импульсная характеристика взвешивающего фильтра.
Поскольку в современных системах передачи предпринимаются специальные меры по подавлению постоянной составляющей в передаваемых сигналах, функция вычисления огибающих A x ( t ) и A y ( t ) взвешенных сигналов Xj ( t ) и y ( t ) может быть описана выражениями:
t ' A x ( t ) = J [ x 1 ( t )] f 0 ( t - T ) dT , -∞ ∞
A y ( t ) = J [y"(T)] 2 f 0 ( t - T ) d T ,
-∞ где f0 (t) - сглаживающая функция. Обычно -t f 0 (t) = e Tc , где Tc - постоянная времени сглаживания. В простейшем случае вычис огибающих может быть выполнено без использования свертки (эквивалентно прямоугольной функции сглаживания):
tt
A x ( t ) = J [ x 1 ( T )] dT , A y ( t ) = J [ У ( T )! dT . t - T t - T
Представленные таким образом огибающие имеют физический смысл мощности сигнала, их квадратичная зависимость от напряжения должна учитываться только при сравнении с порогом чувствительности распознавания речи AП. Сиг-SB^ SП(t) формируются на основании сравнения значений Ax (t) и Ay (t) между собой и с пороговым значением с учетом динамики смены режимов ЭЗ. Результатом сравнения является → векторный сигнал 2 (t) вида
→
Л ( t ) =
Л1 (t)
Л 2 ( t ) л 3 ( t )
где Xi (t) - двоичные сигналы, описываемые вы- ражениями:
А ( t ) = sign [ A x ( t ) - Ап];
^ 2 ( t ) = sign [ A y ( t ) - A n ] ; (4)
A ( t ) = sign A y ( t ) - A x ( t )] ,
A П – чувствительность распознавания речи;
sign [ x] =
1, x > 0
<
0, x < 0
Если 2 1 ( t ) ^ 2 2 ( t ) , имеет место ограничение
2 ( t ) = 2 1 ( t )[1 - 2 2 ( t )] . (5)
В настоящее время на сетях связи используются эхозаградительные устройства, работающи двумразличнымалгоритмам.Воднихзона Y ст ческой диаграммы состояний (СДС) соответствует режиму «перебой», в других – режиму «покой». В обоих случаях режиму «блокировка» на СДС соответствует комбинация сигналов 2БЛК (t):
2 блк ( t ) = 2 2 ( t )[1 - 2 ( t )] .
Если зона Y соответствует режиму «перебой» на СДС, то
Х прб ( t ) = 2 1 ( t ) 2 ( t ) ;
2 пк (t) = [1 - 2 1 (t)][1 - 2 2 ( t )] ,
ХПрБ^ ХПК(t) - процессы, соответствую щие режиму «перебой» и режиму «покой».
Если зона Y соответствует режиму «покой» на СДС, то
Х прб ( t ) = 2 1 ( t )2 ( t )2 ( t ) ;
Х пк (t) = 1 - 2 2 ( t ) .
Нетрудно убедиться, что в обоих случаях справедливо
^ БЛК (t)^ ПРБ (t ) = 0 ;
^ БЛК (t)^ ПК (t ) = 0 ;
^ ПРБ (t)^ ПК (t ) = 0 ;
^^ ПК (t ) + λ БЛК ( t ) + λ ПРБ ( t ) = 1-
Последнее уравнение системы имеет место в силу ограничения (5).
→
S (f) 2 (t )
с учетом следующих динамических параметров ЭЗ: tУБ ( t ) , tОБ ( t ) - соответственно, время установления и отпускания режима «блокировка»; ty n ( t ) ’ to n (t ) - аналогичные параметры режи- t ПБ – время перехода ЭЗ из режима «пеебой» в ежим «блокиовка».
→
Формирование сигнала S ( t ) осуществляется следующим образом. До начала работы устанав-
S П устанавливается в состояние 1 в момент времени t , если выполняется условие t
J^ ПРБ (т) dT = tyn .
t - t УП
S П = 1 поддерживается до тех пор, пока не будет выполнено условие
(2 (т) dT = 0(7)
ПРБ t-t1
где t 1 = t on Х ПК + t ПБ Х БЛК ; в этом случае устанавливается S П (t ) = 0 .
Аналогично, устанавливается S Б (t) = 1, если
J А блк ( Т ) dТ = <„ , (8)
t-t 2
где t2 tnBSn (t- о ) + tnESo (t- о ) •
При этом S П ( t_ 0 ) - предшествующий режим
S П устанавливается в состояние 1 в момент времени t , если выполняется указанное условие.
S Б = 1 поддерживается до тех пор, пока не будет выполнено условие
t
J ^ БЛК ( t ) d T = 0 , (9)
t-t 3
где t 3 = t ОБ А ПК + t yn А ПРБ . При выполнении условия (9) устанавливается S Б ( t ) = 0 .
Алгоритм работы ЭЗ с адаптивным перебоем опирается на известное значение затухания эхо- а Е . Рекомендаций по измерению значе- а Е в рассматриваемом приложении в имеющихся литературных источниках не обнаружено. В качестве прямой процедуры измерения текуще- а Е может быть использована вычислительная процедура вида:
аЕ (t) = -20lg K э (t), t где Kэ(t) = ^ f[Ay(t)/Ax(t)]1 -S5(t)dT. уср t-Туср
Как было отмечено ранее, наличие временного сдвига между эхо сигналом в составе Ay (t ) и его оригиналом в составе A x ( t ) ограничивает точность определения К Э ( t ) на нестационарной речи; повышение Vпр, в этом случае может привести процесс адаптации к потере устойчивости.
Для преодоления этой проблемы предлагается управление адаптацией по сигиалам Ar (t) и Av (t ) на рис. 1, где A X ( t ) = К п ( t ) A x ( t - тю), Кп (t ) — текущее значение коэффициента переда- τ кз – значение времени концевой задержки, измененное ИКЗ.
Реализация процесса адаптации К П ( t ) с неравными значениями Vпр и Vобр имеет наиболее простое решениевтехнологиидискретных систем автоматического регулирования. Интервал дискретизации целесообразно привести к кратности интервала усреднения огибающих (2 мС); такое решение создает ряд технологических удобств, хотя и не является обязательным. В общем виде интервалы дискретизации в режимах прямой ( Тпр ) и обратной ( Тобр ) адаптации могут иметь неравные значения; чрезмерное увеличение этих параметров свыше 4...6 мС может ограничить скорость адаптации. Значение коэффициента на очередном интервале адаптации iT :
КП [(i + 1)T ] = КП (iT )^p(iT), где ^p(t) - величина шага адаптации.
Постоянство скорости адаптации в единицах
Δp для данной скорости, таким образом значение должно вычисляться на основе следующего выражения:
[ 1 —Sn (t)]{SБ ( t ) УирТиР + [ 1 - SБ ( t )] VОБРTОБР } Sy(t)
Ajp(t) = 10 10 , где Sv (t) = sign{Kn (t)A (t - TKJ - A (t) - AКА ], AПКА – порог конца адаптации. В этом случае поведение КП (t) будет описываться выражением:
«Е Jp-SsW-^lr)]^
К П ( t ) = ( Кнп +10 - ) {1 - ехр[-^----^-----] +
JS Б ( Т )d T „Е
+ exp[ - 0 т ПР ]} - 10 20 ,
К НП – значение начального перекоса СДС.
Результаты проведенных масштабных натурных экспериментов, проведенных на основе предложенных алгоритмов, подтвердили краевой характер решения оптимизационной задачи рекомендуемых в настоящее время значений Vпр и Vобр и дали основание сформировать следующие выводы.
-
1. Оптимальное значение скорости прямой адаптации, уменьшение и увеличение которого одинаково приводят к ухудшению субъективных оценок качества телефонной передачи, составляет 30 дБ/С.
-
2. Скорость обратной адаптации слабо влияет на качество телефонной передачи, ее значение может быть установлено равным рекомендованному 4 дБ/С.
-
3. Сужение траектории движения точки, определяющей режим одностороннего разговора в координатах статической диаграммы состояний, в принятой концепции заграждающего принципа дает основание рекомендовать начальное смещение диаграммы в сторону зоны блокировки на 3…5 дБ; такое решение ускорит процесс адаптации и в подавляющем большинстве соединений окажет положительное влияние на качество телефонной передачи. По этой же причине на 2…3 дБ может быть снижено значение порога начала адаптации.
-
4. При формировании режима, помимо мощности сигналов, усредненной на интервале 2 мС, целесообразно учитывать масштабированную мощность предшествующего интервала аналогичной длительности; значение масштабирующего коэффициента, используемого при проведении эксперимента, равно 2.
Список литературы Оптимизация управления заграждающей функцией эхоподавляющих устройств
- ITU-T Rec. G.164. Echo suppressors. November 1988.
- ITU-T Rec. G.165. Echo cancellers. March 1993.
- Аладин В.М., Мусатова О.Ю., Шаврин С.С. Эхокомпенсатор как средство измерения времени концевой задержки//Электросвязь. №7, 2008.-С.24-25.
- Шаврин С.С. Математическая модель эхозаградителя//Труды НИИР. №2, 1987. -С. 87-93.
