Organization of walking of the lower-extremity exoskeleton using the control of the supporting foot

Author: Issabekov Zh. N., Tsybrii I.K., Moroz K.A.
Journal: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Section: Машиностроение и машиноведение
Article in issue: 3 т.21, 2021.
Free access
Introduction. The development of robotics in many advanced countries has raised various industries to a high level. The demand for robots increases the share of their use in production tasks, mainly in the motor-vehicle and electronics industries. Advanced robotics can increase productivity in many industries by 30%, while reducing labor costs. Automation of technological processes of electronics production has a positive impact on the use of robots. Robots are used in construction, logistics, oil and gas, aerospace, plant engineering and construction, mining, healthcare, etc. The authors consider robots from the point of view of their application in medicine for the rehabilitation of musculoskeletal patients. This paper describes the mechanisms for controlling the feet and the center of mass of a humanoid robot.Materials and Methods. The authors chose the simplest algorithm for searching for the law of motion control of a humanoid robot. The robot movement was presented as a reverse pendulum. Using the large kinematic redundancy of walking robots, we have developed a way to control the robot in such a way as to bring the dynamics of its movement to the reverse pendulum as close as possible. At the same time, the problem of determining the generalized coordinates is considered, at which a given position and orientation of the transferred foot and a given position of the projection of the center of mass (CM) of the robot onto the reference surface are provided.Results. The authors have developed a digitalized automatic control scheme for the movement of the feet and the center of mass of the human exoskeleton, which will largely reduce the load on a sick person.Discussion and Conclusions. When discussing the results, comparing the data of the tables obtained during the calculation, the following conclusion was made. The scheme for controlling the feet movement of a human exoskeleton developed by the authors is most effective when designing an automatic scheme for controlling the movement of the feet and the center of mass of a human exoskeleton using digital technology, which will largely reduce the load on a sick person.
Center, mass, supporting foot, exoskeleton, robot, human, movement dynamics, reverse pendulum
Short address: https://sciup.org/142231712
IDR: 142231712 | UDC: 681.5 | DOI: 10.23947/2687-1653-2021-21-3-247-252
Организация ходьбы экзоскелета нижних конечностей при помощи управления опорной стопы
Введение. Развитие робототехники во многих передовых странах подняло на высокий уровень различные отрасли промышленности. Спрос на роботов увеличивает долю их использования в производственных задачах, в основном в автомобильной и электронной промышленности. Передовая робототехника может повысить производительность во многих отраслях на 30%, при этом сократив затраты на рабочую силу. Положительное влияние на использование роботов оказывает автоматизация технологических процессов производства электроники. Роботы применяются в строительстве, логистике, нефтегазовой, аэрокосмической промышленности, производстве промышленного оборудования, добычу полезных ископаемых, здравоохранение и др. Авторы рассматривают роботы с точки зрения применения их в медицине для реабилитации больных опорно-двигательного направления. В данной статье приводятся механизмы управления стопами и центром масс робота-человека.Материалы и методы. Авторы выбрали самый простой алгоритм поиска закона управления движением робота-человека. Движение робота представили, как обратный маятник. Используя большую кинематическую избыточность шагающих роботов, разработали способ управления роботом таким образом, чтобы максимально приблизить динамику его движения к обратному маятнику. При этом рассмотрена задача определения обобщенных координат, при которых обеспечивается заданное положение и ориентация переносимой стопы и заданное положение проекции центра масс (ЦМ) робота на опорную поверхность.Результаты исследования. Авторами была разработана цифровизированная автоматическая схема управления движением стоп и центра масс экзоскелета-человека, которая во многом снизит нагрузку на больного человека.Обсуждение и заключение. При обсуждении результатов, сопоставлении данных таблиц, полученных в ходе расчета, был сделан вывод, что разработанная авторами схема управления движением ног экзоскелета-человека наиболее эффективна при проектировании автоматической схемы управления движением ног и центра масс экзоскелета-человека с использованием цифровых технологий, что в значительной степени снизит нагрузку на больного человека.
Text of the scientific article Organization of walking of the lower-extremity exoskeleton using the control of the supporting foot
Introduction . The development of robotics in many advanced countries has raised various industries to a high level. The demand for robots increases the share of their use in production tasks, mainly in the motor-vehicle and electronics industries. Advanced robotics can increase productivity in many industries by 30%, while reducing labor costs. Automation of technological processes of electronics production has a positive impact on the use of robots. Robots are used in construction, logistics, oil and gas, aerospace, plant engineering and construction, mining, healthcare, etc. The authors consider robots from the point of view of their application in medicine for the rehabilitation of musculoskeletal patients. This paper describes the mechanisms for controlling the feet and the center of mass of a humanoid robot.
Materials and Methods . The authors chose the simplest algorithm for searching for the law of motion control of a humanoid robot. The robot movement was presented as a reverse pendulum. Using the large kinematic redundancy of walking robots, we have developed a way to control the robot in such a way as to bring the dynamics of its movement to the reverse pendulum as close as possible. At the same time, the problem of determining the generalized coordinates is considered, at which a given position and orientation of the transferred foot and a given position of the projection of the center of mass (CM) of the robot onto the reference surface are provided.
Results. The authors have developed a digitalized automatic control scheme for the movement of the feet and the center of mass of the human exoskeleton, which will largely reduce the load on a sick person.
Discussion and Conclusions . When discussing the results, comparing the data of the tables obtained during the calculation, the following conclusion was made. The scheme for controlling the feet movement of a human exoskeleton developed by the authors is most effective when designing an automatic scheme for controlling the movement of the feet and the center of mass of a human exoskeleton using digital technology, which will largely reduce the load on a sick person.

Организация ходьбы экзоскелета нижних конечностей припомощи управления опорной стопы
1 Сатпаев Университет (г. Алматы, Республика Казахстан)
-
2,3 Донской государственный технический университет (г. Ростов-на-Дону, Российская Федерация)
Введение. Развитие робототехники во многих передовых странах подняло на высокий уровень различные отрасли промышленности. Спрос на роботов увеличивает долю их использования в производственных задачах,
Машиностроение и машиноведение
в основном в автомобильной и электронной промышленности. Передовая робототехника может повысить производительность во многих отраслях на 30%, при этом сократив затраты на рабочую силу. Положительное влияние на использование роботов оказывает автоматизация технологических процессов производства электроники. Роботы применяются в строительстве, логистике, нефтегазовой, аэрокосмической промышленности, производстве промышленного оборудования, добычу полезных ископаемых, здравоохранение и др. Авторы рассматривают роботы с точки зрения применения их в медицине для реабилитации больных опорно-двигательного направления. В данной статье приводятся механизмы управления стопами и центром масс робота-человека.
Материалы и методы. Авторы выбрали самый простой алгоритм поиска закона управления движением робота-человека. Движение робота представили, как обратный маятник. Используя большую кинематическую избыточность шагающих роботов, разработали способ управления роботом таким образом, чтобы максимально приблизить динамику его движения к обратному маятнику. При этом рассмотрена задача определения обобщенных координат, при которых обеспечивается заданное положение и ориентация переносимой стопы и заданное положение проекции центра масс (ЦМ) робота на опорную поверхность.
Результаты исследования. Авторами была разработана цифровизированная автоматическая схема управления движением стоп и центра масс экзоскелета-человека, которая во многом снизит нагрузку на больного человека. Обсуждение и заключение. При обсуждении результатов, сопоставлении данных таблиц, полученных в ходе расчета, был сделан вывод, что разработанная авторами схема управления движением ног экзоскелета-человека наиболее эффективна при проектировании автоматической схемы управления движением ног и центра масс экзоскелета-человека с использованием цифровых технологий, что в значительной степени снизит нагрузку на больного человека.
Introduction. In many advanced countries, the successful introduction of robotics has raised various industries to a high level. The demand for robots has increased the share of their use in production tasks to 25–45 %, mainly in the motor-vehicle and electronics industries. Advanced robotics can increase productivity in many industries by 30 %, while reducing labor costs by 18–33 %. Modern robotics can significantly change the entire value chain of products. It is estimated that there are about 1.8 million industrial robots operating in the world production systems today, representing a global market of about $35 billion: the possibilities of robotics continue to grow, and the costs of manufacturing robots continue to fall (they have decreased by about 25 % over the past decade). In production, the largest number of robots are used for packaging, grabbing and moving (in Russia, almost 40 % of the 1.7 million), and this application has the highest annual growth rate (on average, 11 % per year for 2010-2014). The second common application is in the production of cars, where robots are used primarily for welding. The use of robots for assembly is also a fast-growing segment (the average annual growth rate in 2010–2014 was 10 %) due to the growing number of electronics/electrical industry products that seek miniaturization and require increased accuracy in manufacturing.
At Russian enterprises, the density of production robotization is more than 20 times lower than the global average. According to the statistics of the International Federation of Robotics, in Kazakhstan, as well as in Russia, there are only three industrial robots per 10000 workers, while on average there are 69 worldwide, and more than 100 – in the leading countries in the field of digitalization. For example, the share of the Russian market of industrial robots is only 0.25 % of the global volume, the main consumers are China (27 %), South Korea (15 %), Japan (14 %) and North America (about 14 %). There is also a lag in the share of machines with numerical control: in Japan it is more than 90 %, in Germany and the USA – more than 70 %, in China – about 30 % [1–3].
Modern robotics has been successfully developed in Kazakhstan. Modern factories are being built, where robots perform monotonous work. The growth of investments in robotics is increasing every year in Kazakhstan. Currently, Kazakhstani enterprises are given a chance to reduce the gap with world leaders. The great flexibility and intelligence of robots allow them to be used in various industries where they have not been traditionally used, including the production of food and beverages, consumer goods and pharmaceuticals.
New concepts have emerged, such as wearable electronics and virtual reality, which can be used for quality control, work instructions, training, workflow management, various operations, security, logistics, and maintenance. In addition, the increased accuracy of these technologies provides improving the profitability of the enterprise by increasing productivity. And the instability of quality can be reduced by shortening downtime, defects and waste while decreasing the lead time [2]. The development of new technologies will significantly change production processes: it is most effective in those industries where it is important to adapt the product to customer requirements, and components are produced in small volumes and have a high cost. Therefore, the production of consumer goods and the motorvehicle industry, medical and aerospace industries are priorities in the Republic of Kazakhstan, especially in the use of 3D printing technologies, the production of highly reliable medical devices: hearing aids, dental and other prostheses.
Materials and Methods. Among all types of robotics, the authors distinguish the medical field. They are engaged in the development of exoskeletons of bipedal walking machines (BWM) [4–8]. For BWM, it is generally accepted to distinguish two types of walking: static and dynamic. At the static walking, the robot movements are so slow that it is possible to neglect the forces of inertia. This allows using a control algorithm built on the basis of only equations describing the kinematics of the robot. However, the device speed depends on its size, dynamic parameters, kinematic scheme. For many walking machines, this is the main method of control. Figure 1 shows an image of an exoskeleton that is being developed by the authors.
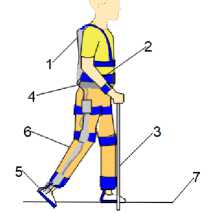
Fig. 1. Functional scheme of the exoskeleton:
1 — backpack with a microprocessor; 2 — arm; 3 — crutches; 4 — trunk; 5 — foot; 6 — leg; 7 — reference surface
The equations describing the dynamics of the robot are complex and require the use of well-known methods for solving variational problems of large dimension. A simpler algorithm for finding the law of movement control of a human robot is needed. The authors from the Bauman Moscow State Technical University proposed the simplest way – to imagine the robot as a reverse pendulum and, using the large kinematic redundancy of BWM, control the robot in such a way as to bring the dynamics of its movement to the reverse pendulum as close as possible [4–5].
Let us consider the problem of determining the generalized coordinates at which a given position and orientation of the transferred foot and a given position of the projection of the center of mass (CM) of the robot on the reference surface 7 are provided (Fig. 1). The position and orientation of the supporting foot will be considered known. Let S be a vector of a given position of the robot foot 5 and CM 6, having dimension 8,
S = (X F , Y F , Z F , a F , P F , Y F , x CM , y CM ) T .
It is required to determine the vector q with dimension 14 BWM, which has 14 controlled mobility stages.
The task is complicated by the fact that BWM has 14 degrees of mobility, the vector S is 8, and there are kinematic restrictions in the mobility stages, the external connections imposed on the feet of BWM change during each step.
In this case, various methods are used to solve the inverse problem. For example, an iterative method based on minimizing the objective function, and a method for solving the inverse problem in increments based on using the Jacobi matrix. However, to control the robot, whose kinematics is represented as a kinematic tree not attached to the rack, it is necessary to solve the inverse problem for the supporting foot, the transferred foot, and the projection of the center of mass on the reference surface [11–13].
The objective function used has the form: f=f F1 +f F2 +f СМ +f P where f F1 and f F2 – the components of the objective function that determine the feet positions; f CM – a component of the objective function that determines the position of the projection of the center of mass; f P — a penalty function that allows bringing the solution closer to the optimal one by some criterion.
On the trajectories of the feet movement and the projection of the center of mass, points are selected so that they can then be applied to restore the original trajectory using interpolation with a given accuracy. Ti is the matrix of the actual position of the foot, and Ti0 – the specified position matrix. These matrices are equal if any three points that do not match in the connected system have, respectively, the same coordinates in the absolute system [5–9].
-
'T *xx = T 0 ix , '
-
< T, i x 2 = T 0 i x 2 >
T ' x, = T 0 ' x3 i i 3 i 3
Setting the vectors ix1, ix2, ix3 as:
Машиностроение и машиноведение
x 1 = ri
'x 2 = rj
'x 3 = rk i,j,k – the directing vectors of the coordinate axes;
r is a parameter that determines the ratio of the accuracy of solving the inverse problem in angular and linear coordinates
A T = T. - T. 0
we get where the matrix H has the form:
f F = tr ( A TH A T )
r2 0 0
0 r 20 r
0 0 r2
r r r3
consider the component of the objective function that determines the position of the projection of the center of mass of BWM on the reference surface. The coordinates of the projection of the center of mass are determined by the formula:
I X ^
5 см I \ ' m^O
,
=| 1= | L mPTr ^
I ум)
where M – robot weight; N – the total number of degrees of mobility of the human robot; m – mass of an individual link; rCM – vector of the CM link; P – the projecting matrix.
p =
The index i changes from 6, because the links of the kinematic tree with smaller numbers are fictitious and have zero mass. If ASсм = (х(см, ytc„)T is the target position of the proj ection of the center of mass, and AScm = Scmt - S^ , then f = AS2 cм см
Penalty function fP = A qT A A q, where q - change of the generalized coordinates when moving to a new point; A - a diagonal matrix of weight coefficients.
Physically, the penalty function f P is proportional to the work performed by the drives when moving to a new point [10].
When considering the robot movement as the motion of an inverse pendulum, the following equations were adopted (Fig. 2):
x-x0 = Isina, a = arcsinx- l cos a
M _ g sin a
У “ l
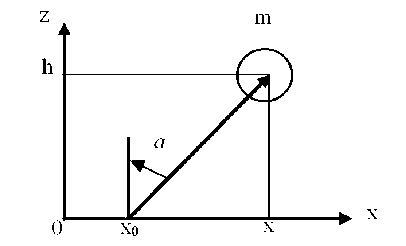
Fig. 2. The motion of the reverse pendulum with a constant height of the center of mass
The pendulum motion along the horizontal x axis is described by the equations
X - Xo mx = mg — 0
x - gx h
gx 0 h
take X0 = 0 and denote
X=
We obtain a homogeneous linear differential equation x (t) = c1 e-x t + c 2 eX t
Substituting the initial conditions, we get c1
x 0
2X e
^^^^^^е
x 0
-X t о
c 2
X x о + x о 2 X e" t о
The equation will take the form
x (t ) =
X x о - x 0 e -ч t - 1 о ) Xx о + x о e 4 , - , о )
2X
2X
At small angles of inclination of the pendulum, the solution to this equation is close to the solution to the nonlinear one written for a pendulum of constant length. Under different conditions, only the expression λ [3, 10, 11, 12] will change.
Research Results. When analyzing the calculations with various options, it was concluded that the matrix method is quite time-consuming, takes a lot of time, and does not give measurement accuracy, whereas modern methods provide considering the dynamics of the foot movement and the center of mass with greater accuracy, and divide the study not into eight or twelve points, but into more, bringing closer to more accurate results.
Discussion and Conclusions. When discussing the results, comparing the data of the tables obtained during the calculation, it was concluded that the scheme for controlling the feet movement of a exoskeleton-human developed by the authors is most effective when designing an automatic scheme for controlling the movement of the feet and the center of mass of an exoskeleton-human using digital technology. As a result of the obtained equations, an automatic control scheme using digital technology was developed, which is shown in Fig. 3 and works as follows.
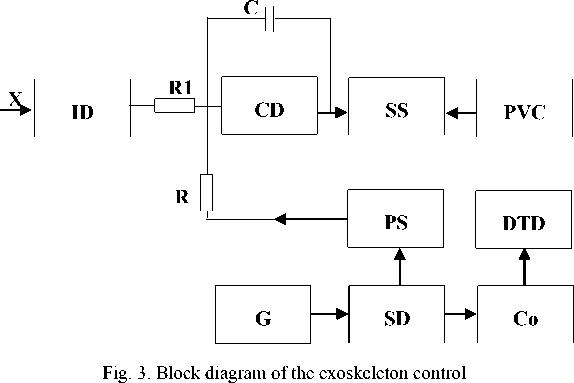
The control device (CD) sets the measurement cycle of the TC and generates a pulse of the first cycle with duration of T 1 . During the time interval T 1 , the electronic key SA is in the initial state, and the measured position of the feet and CM through the input device ID goes to the integrator and informs the capacitor (C) the amount of electricity
T q^ = - 1 и 3 Rx
At the end of the pulse Т 1 , the CD opens the SD key, and the counter Co starts receiving pulses from the generator G . At the same time, the SD key is transferred to the second stable state, and the reference value λ of the reverse polarity is received by the integrator. The capacitor C is discharged to the initial state during the time interval
T
T x :. q p = -x U x
R
At the end of the discharge of the capacitor, the voltage at both inputs SS are equal to zero, the SS gives the command to open S . The receipt of pulses to the counter stops. Their number determines the Т x. Since the amount of electricity during the charge and discharge of the capacitor is the same, then
T и = —Uc xT1 C
Therefore, the measurement result is proportional to the parameters. The time interval Т x does not depend on the time constant of the integrator, i.e., no chains with highly stable elements are required to implement the double integration
Машиностроение и машиноведение
method. The duration of the first cycle of integration Т 1 and the value of the reference values can be kept constant with high accuracy, and therefore the error of converting voltage into a time interval is insignificant with this method. The noise immunity at the multiplicity of the time of the first integration cycle Т 1 to the interference period reaches 60 dB or more.
