Основной метрический треугольник в анализе чувствительности управляемых сетей

Автор: Соловьв А.С.
Журнал: Экономика и социум @ekonomika-socium
Рубрика: Основной раздел
Статья в выпуске: 10 (65), 2019 года.
Бесплатный доступ
В работе предлагаются методы анализа сетей социального и экономического назначения на основе показателей основного метрического тождества.
Нейронные сети, орграф, оценка, сравнение, обучение, цель, категории, чувствительность
Короткий адрес: https://sciup.org/140245944
IDR: 140245944 | УДК: 330.1(0.75.8),
The main metric triangle in the sensitivity analysis of managed networks
The paper proposes methods of analysis of social and economic networks on the basis of indicators of the basic metric identity.
Текст научной статьи Основной метрический треугольник в анализе чувствительности управляемых сетей
Как правило, социальные и экономические системы S имеют иерархическую структуру с внутренней организацией качественного порядка [1] и представляются плоскими орграфами рис. 1. Состоят из объектов Ob =
Рис. 1. Сеть прямого распространения.
{ x 0 , x 1 , x 3 , ...} и связей между ними, морфизмами, а10 = Xi%0, ^е Мог, т.е. представлены малой категорией
S = (ОЬ,Мог).
На рис.1 представлена схема сети прямого распространения. Такие сети предназначены для создания конечного продукта деятельности. Графы обратной направленности определяются как сети обратного распространения
[2]. В иерархической сети объекты можно представить срезами по критериальным уровням из деятельности. В отличие от [2] назовём слоем орграф между двумя срезами. В зависимости от ориентации графа срезы в таком слое назовём верхней и нижней гранями. Каждый срез у разбивает граф S на два подграфа S и S так, что S = S + U $ - , у = S + A 5 - .
Если система представлена сетью прямого и обратного распространения, то, вероятнее всего, такая система создаёт конечный продукт с внутренним управлением, которое подстраивает её существование к требованиям внешней среды. Такую систему назовём замкнутой. Элемент замкнутой сети изображён на рис. 2.
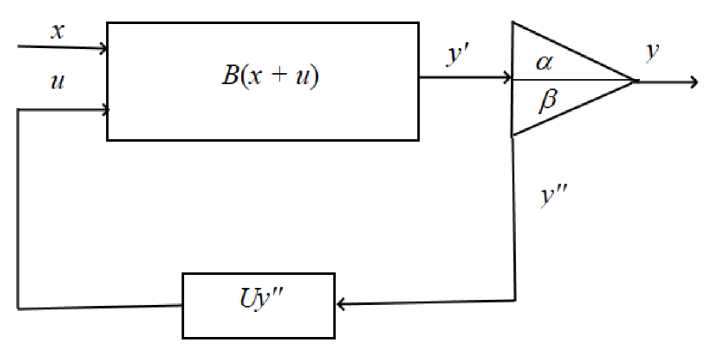
Рис. 2. Схема структурного элемента сети с управлением.
Сеть сама представляет собой управляемый элемент во внешней среде и её представление определённой схемой условно. Схему сети можно агрегировать и дезагрегировать так, что блок сети становиться отдельным её элементом. Представим её категорией в виде объединения элементов и их связей
^ = М ^т> $т (^Ьт, Могт)
'*-' теМ и определим функтор F:5 ^ Я , который отображает описание её состояния в поле вещественных чисел
Я = (Х,ЭД) так, что объекты отображаются на множество векторов Х = F ( Ob ), а морфизмы - на множество прямоугольных матриц ЭД = F ( Mor ). В линейных сетях элементы выполняют роль линейных преобразователей. Но им можно придать и свойства квазилинейности [3].
Из рис. 1 следует, что составляющие элемента x, u, y, y'у'' принадлежат векторным пространствам, а операторы B, U, и а, в — матричным пространствам. Поскольку в общем случае управление отвечает каждому фактору, то если полагать для соответствующего элемента степень захода равной n , а степень исхода равной m , то имеем: x, и с №, у, у', у'' с ^, B с M m x^, Uс ^х^1, а, в с M m xM m .
Пренебрегая лагом длительности передачи управления и полагая единицу соответствующим тождественным оператором, можно заключить, что схема действия элемента отвечает системе уравнений
г у' = В (х + и),
у'= у+ у".
у = ау', у'' = Ру',
Отсюда находим, что
и = Uy", а + 0 = 1. система работает как сеть прямого распространения, действие которой описывается векторным уравнением у = Ах, (1)
с матричным оператором
аВ
А =-------
1 - BU^
где U,^ - матричные операторы, формирующие вектор управления и.
Назовём систему стандартной, если значения на всех её объектах равны единице. К стандартному виду можно привести любую систему вида (1). Если системы имеют одну и ту же структурную схему S (совпадает их графическое изображение, графы) и приведены к стандартному виду, то
T = Af, у = Вх, f,т,х,у е X, А,В е 31,
а их действие отличается только операторами A и B . Состояния систем, описание которых приведено к стандартному виду легко сопоставляется. При этом, сопоставляются состояния и любых их подсистем, что удобно при поиске слабых мест при настройке их ориентации поскольку их состояния отвечают только наблюдаемым A и B .
При оценке, сравнении, обучении системы, в задачах поиска всегда предлагается тестовая модель Я 0 состояния системы. Тестовую модель назовём эталоном и представим её в блочном виде
Я о = Н Я ощ
Jтем
Положим существование её аддитивной меры [4]
-
*-^ тем т-Мем
Текущее состояние Я системы представим в том же блочном виде и определим его меру аналогичным метрическим функционалом
D(V = Я2 = У Я щ2 = У Dm(&).
-
*—> тем т—МпеМ
На данном расслоении системы определим аддитивную меру поблочного бинарного соответствия W = (Я, Я0) с метрическим тензором G , который является самосопряжённым оператором
/(W) = У /(Wm) = У /m(W),
t—1 тем m^M^M
W = H (W m = (Я m ,Я mo )).
JI meM
Согласованность мер определим равенством
D(Я) = /(Я,Я) = Я * СЯ = Я2, Я * = ЯС * , G*G = 1 ^ , и расширим её с диагонального множества на бинарное соответствие состояний, полагая
D(W) = D(Я')D(Я0).
По аналогии с теорией индексов введём индикатор типа Ласпейреса, который определяет меру на множестве W рекурсией
/(w) = ^ = SmeMp’ " /m(w),
ШЯ 0 )
где m. Dm(Яo) , „„./WW
Р D(Яo) ' m( ) Dm(W)
Рекурсия показывает, что любой блок Wm, системы, не являющейся меры нуль, сам является метрическим пространством.
Определим соотношением
D(W)
D^
= 02(W)
индекс полного состава [5, формула (6), стр. 15] и введём дополнительную меру hJ(W) = ±7^2(W)-/2(W), где h > 0 служит множителем пропорциональности. Находим, что три данные меры Ф, I и J на бинарных соответствиях состояний системы связаны основным метрическим тождеством [6]
02(W) = /2(W) + h2J2(W).
При гомотетии [7, стр.57] состояний J ( W ) = 0 и Ф ( W) = I ( W). При структурных различиях (деформации системы [8]) показатель J отличен от нуля. Он монотонно возрастает с ростом структурных сдвигов. При этом, оператор Гамильтона принимает вид
Я = |ф2 = T + U, где T = /2(W), U = h2J2(W) операторы фактического состояния системы и её потенциальных возможностей (показатель h можно принять равным единице), трансляции и ротации, соответственно.
Рассмотрим состояние системы (2) и предположим, что на объектах определена с метрическим тензором G вполне аддитивная мера
/(у,т]) =T]*Gy = y*Gr]. (3)
Определим бинарное соответствие исходов ( y, п ) = w, ему сопряжённое w* = ( П, У ) и введём обозначения:
В = ^(w) = q ( w*\ D(y) = у2 = м(У,У) = °2 ( y\
D(w) = D(y)D(q), a(w) = a^y^aQq).
Для анализа отклонения исходов приходим к основному метрическому тождеству o-2(w) = q2(w) + |v(w)|2.
Из соотношений (2) и (3) вытекают представления q(y,ri) = ^*A*Gy = rfGBx = %*A*GBx, которое вместе с тождеством (4) позволяют оценивать относительно потоков входа и выхода эталона взаимное влияние фактических потоков.
Определяя состояние объекта величиной a , находим, что на основании
-
(4) состояние можно описать кватернионом
a = q + in]vl = ае1пв,
где n – некоторый единичный вектор1,
|v|
6 = arctq — В
-
- биекция, является показателем вращательной симметрии – показатель оценки структурных сдвигов, и удовлетворяет соотношению Шаля [7, стр. 51].
Если обе части тождества разделить на оценку D ( η ) эталона, то придём к индикаторам теории индексов
D(y)
-
• ^ = й(Д) — индекс объёма производства;
^(у,л)
_
-
• ^ = ”о(Д)— индекс переменного состава;
\у(ум)\
-
-
• J = о^) --индекс структурных сдвигов.
На основе данных индикаторов определим коэффициент уровня согласованности фактического состояния элемента с эталоном
–
коэффициент корреляции, r = μ/σ . Его квадрат p = d = r 2 определяет детерминацию d свойств эталона в состоянии объекта. Его можно рассматривать в качестве вероятности совпадения состояния с эталоном. Квадрат коэффициента вариации к = |v|/o определяет коэффициент остаточной детерминации q = 1 – p = V 2, где V = |ν|/σ = tg θ и является показателями структурных сдвигов. Все эти показатели связаны с оценкой состояния системы, с её управлением, обучением, с устойчивостью системы к неожиданным воздействиям. В последнем случае целью обратной связи становится уменьшение системы к изменению её факторов.
Если F = F ( x ) критериальный показатель, то инфинитезимальная характеристика коэффициента чувствительности к изменению xi фактора определяется формулой
dF xl dF
£l dxl F dx1'
Учитывая представление индекса переменного состава в виде взвешенной суммы индивидуальных индексов
I = Р% имеем:
PiIi £i(n=—, £i(^) =
^(v) = -
p1Ii2 Л2 ’ £i(r)
V2 ,
Pi Ii(Ii- y ) Pi Ii( y -Ii)
£i(J) = P ----~p-----, £i(r) =----^----,
£,■ (r)
£i(V) = —^, £i(0) =
-
£i(r) ve ■
В эти выражения входят три средние взвешенные величины: средняя арифметическая I , средняя квадратическая X и средняя гармоническая у, которые связаны равенством Л 2 = у1. Поскольку в суммах
У £i(I) = У £i£N(A) = 1
^ ieN i-NieN все слагаемые неотрицательны, то два первых показателя можно рассматривать как вероятности обнаружения соответствующих свойств в оценках арифметической и квадратической средних. Чем больше коэффициент чувствительности, тем больше его влияние на соответствующий показатель. Если для всех носителей свойств i е N имеют место равенства
Ii = Y>
то Л = I = y,J = 0,r = 1 и оцениваемые объекты качественно подобны с коэффициентом подобия равным у.
Из равенств £i (r) = zi (I) = zi (Л) и равенства
У £ i( f) = 0
^ ieN следует, что носитель N разбивается на два подмножества N+ и N с положительной а+ и отрицательными а чувствительностями коэффициентов корреляции. Из а+ ^ 0 следует r ^ 0. В сумму а+ входят те факторы, увеличение которых приводит к росту качественных отклонений от эталона. Для отрицательных показателей справедливы неравенства
Vi = у - Ii <0,i e N-.
С ростом наименьшего из них будет сокращаться отклонение качества фактического состояния объекта от эталона (уменьшается ротационная составляющая) и будет увеличиваться трансляция. Отсюда заключаем, что задача оптимальных управлений является двухкритериальной - управлением качеством и количеством, которая сводится к игровой задаче [9].
Запишем показатель чувствительности структурного сходства в виде
Z = У-1Р^>
где Pi = £ i (I)u ^ieNPi = 1, и введём случайную величину V — вектор V = (Vi- i 6 Ю- Поскольку её математическое ожидание равно нулю, т.е.
P ( V) = У PlV i = 0,
^—' ieN если дисперсия Е(р2) равна нулю, то Ii = у для всех i с N. Вероятность, что все индивидуальные индексы лежат в интервале [γ – ε, γ + ε] определяется равенством Чебышева
Е(р2)
Р(-£ < р < +г) >1--—.
Учитывая соотношение
D(x) = у(х,у)р(у,х), среднюю гармоническую величину можно принять в качестве метрической функции.
Поскольку агрегатные показатели связаны зависимостями:
A = yr, I = yd, J = yrv, I = Аг, у = AI, rV, p = r2 = d,
то построим метрический треугольник ABC с опущенной из вершины прямого угла C высоты, определим его стороны
A = AC, I = AD, J = CD, y = AB, y-I = BD,
и введём обозначение L = CB . Данная величина равенством
J = rL
связана со структурными сдвигами. Если основное метрическое тождество Пифагора
A2 = I2 + J2
даёт возможность применять в оценке поведения объекта тригонометрический анализ, то c помощью метрического тождества
A2 =y2- L2
можно проводить анализ с помощью гиперболических функций.
Метрический треугольник появляется как результат качественного отклонения фактического состояния объекта от эталона. При J=0 имеем: DB = 0, AC = AB = AD, т.е. A = у = I, и состояния подобны. Это качественное расхождение можно оценить величиной отрезка DB = Е(р'). Дисперсия этой величины равна Е(р2) = у2 — A2 = L2. Её, например, можно взять целевым критерием в задаче оптимизации при условиях ограниченности ресурсов.
Пусть D(y) < D(η). Тогда I < λ < 1. Разность 1 – I определяет нереализованные возможности объекта по отношению эталона. По величине λ – I можно оценить потенциальное сближение, а величина (λ – I)/(1 – I) даёт оценку сближения фактического состояния с эталоном за счёт структурных сдвигов в общем объёме нереализованных возможностей.
Список литературы Основной метрический треугольник в анализе чувствительности управляемых сетей
- Юдин Д.Б. Вычислительные методы принятия решений //М., Наука, 1989.
- Хайкин С. Нейронные сети //Москва - С-Петербург - Киев,2008.
- Соловьёв А.С. Позиномиальные функции в оценке процессов //ж. "Экономика и социум", №6(37), 2017. www.iupr.ru
- Рохлин В.А. Об основных понятиях теории меры /Мат. сб., т.25(67):1 //М., АН СССР, 1949.
- Кёвеш П. Теория индексов и практика экономического анализа //М., Финансы и статистика, 1990.
- Соловьёв А.С. Основное метрическое тождество //ж. "Экономика и социум", №12(55), 2018. www.iupr.ru
- Берже М. Геометрия, т. 1 //М., Мир, 1984.
- Соловьёв А.С. О деформации социально-экономических систем //http://www.socialphysics.narod.ru/EstimationsStructures/DeformationStructures.htm
