Основы проектирования систем виброзащиты с упругими элементами из материала МР

Автор: Уланов А.М., Пономарев Ю.К.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 3 т.10, 2008 года.
Бесплатный доступ
Определены параметры широко применяемого в виброзащите материала МР (модуль жесткости, коэффициент Пуассона, коэффициент рассеивания энергии, коэффициент трения) в различных направлениях. На основе этих зависимостей получен метод проектирования виброзащитной системы с виброизоляторами из МР.
Короткий адрес: https://sciup.org/148198151
IDR: 148198151 | УДК: 629.7
Design of vibration protection systems with elastic elements made of MR material
MR (metal rubber) is non-linear anisotropic material for vibration protection with high strength and damping. An elastic modulus, shear modulus and Poisson ratio are obtained for this material for different directions. It allows to calculate a deformation of vibration isolator made of MR, to use for it a finite element software. An algorithm for design of MR vibration isolator is given. This algorithm allows to determine size of MR elastic element, its density and preliminary deformation.
Текст научной статьи Основы проектирования систем виброзащиты с упругими элементами из материала МР
Самарский государственный аэрокосмический университет
Определены параметры широко применяемого в виброзащите материала МР (модуль жесткости, коэффициент Пуассона, коэффициент рассеивания энергии, коэффициент трения) в различных направлениях. На основе этих зависимостей получен метод проектирования виброзащитной системы с виброизоляторами из МР.
Виброизоляторы из материала МР (МР – “Металлическая резина” – получается холодным прессованием проволочной спирали) широко используются в виброзащитных системах [1, 2, 4]. Они имеют высокую прочность, высокий коэффициент рассеивания энергии, способны работать в условиях высокой и низкой температуры, в агрессивной среде, вакууме, радиации и так далее. Однако свойства материала МР нелинейно зависят от многих параметров: относительной
ρMR плотности материала ρ = ρ (где ρ – плот- ность материала проволоки, ρMR – абсолютная плотность материала МР), амплитуды деформации A, предварительной статической деформации Q. Применяемые модели материала МР (их обзор присутствует в [2]) в большинстве случаев основаны на рассмотрении контактного взаимодействия проволок в МР, очень сложны и малопригодны для практического применения при проектировании виброизоляторов. В настоящей работе предлагается подход к проектированию систем виброзащиты, использующих материал МР, на основе представления о МР как анизотропной сплошной среде. Такой подход также открывает возможность применения конечно-элементных программ при расчете виброизоляторов из материала МР.
Определение параметров МР
Исследовались образцы в виде куба со стороной l=25 мм, изготовленные из проволоки диаметром 0,1 мм. В принятой системе координат направление прессования – ось Х. Зависимость напряжения прессования от от- носительной плотности материала можно представить уравнением
σ press ≈ 576 ρ 1.7 (1).
Для осуществления деформации сдвига и растяжения образцы приклеивались к жестким поверхностям. Есть некоторые отличия в деформации приклеенных и неприк-леенных образцов.
Коэффициент Пуассона
Коэффициент νyx (описывает влияние силы, приложенной в направлении X , на де-
εy формацию в направлении Y ; ν yx = - )
εx очень мал. В рабочем диапазоне (ε ≤ 0.16) ν ≤ 0.03 . Есть зависимость от относитель-yx ной деформации
ν ≈ 0.2 ε . (2)
yx x
Аналогично νzx . Поскольку коэффициент Пуассона в данном направлении очень мал, не имеет значения, приклеены или свободны нагрузочные поверхности образца.
При сжатии в направлении Y в направлениях X и Z наблюдаются значительные петли гистерезиса (рис. 1).
Они приблизительно подобны петле в направлении Y . Если перестроить петли в координаты εy - εx (или, соответственно, εy - εz ), результат можно описать приблизительно в виде εx ≈ - aεy ± b , где коэффициент a играет роль коэффициента Пуассона, а коэффициент b является остаточной деформацией. Знак + относится к процессу нагрузки, знак – к процессу разгрузки.
Коэффициент Пуассона и остаточная деформация при свободных нагрузочных по-
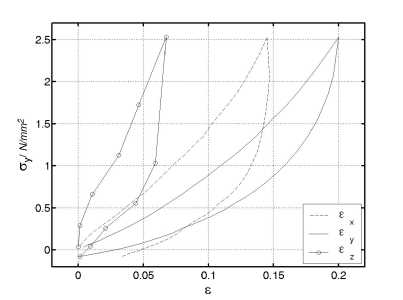
Рис. 1. Петли гистерезиса в направлениях X и Z при сжатии в направлении Y (приклеенный образец)
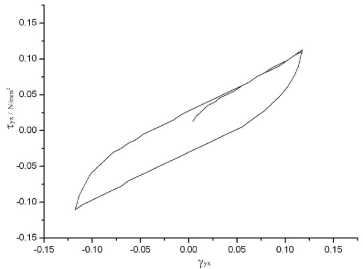
Рис. 2. Деформация образца из МР в одном из направлений сдвига
верхностях зависят от амплитуды деформации и относительной плотности материала.
£ x « ( - 17 s y ± 3.1s y )s y p . (3)
Аналогично νxz .
s - « ( - 8.5 s y ± 0.46 s y ) s y p . (4)
Аналогично νxz .
У приклеенных образцов нагрузочные поверхности деформироваться не могут, поэтому деформация свободных поверхностей больше, и, соответственно, коэффициент Пуассона больше.
Для приклеенных нагрузочных поверхностей вид зависимостей несколько отличается.
sx «-0.66sy ± (-0.075p + 0.03 5), (5) то есть коэффициент Пуассона vxy « 0.66. Аналогично νxz . Точно так же sz «-0.3sy ± (-0.033p + 0.014), (6)
то есть коэффициент Пуассона vzy « 0.3 . Аналогично νyz .
При растяжении (экспериментально проверено до s « - 0.05) деформация материала МР в боковых направлениях не изменяется, следовательно, коэффициент Пуассона равен 0.
Модуль сдвига G и сила трения при сдвиге
Петля гистерезиса при сдвиге (кроме ее концов) близка к линейной (рис. 2), поэтому ее можно приблизительно описать уравнением т = GY ± Tf, (7)
где τf – напряжение от сил трения.
Из обработки большого количества измерений (для различной относительной плотности и различного диаметра проволоки) получены соотношения
Gyx: Gxy : G-y «1:1.53:2.75(8)
THyx:Thx,, :THZy «1:1.26:1.99;(9)
G -x = G yx ; G x- = G xy ; G yz = G zy ;
THzx = THyx ; THxz = THxy ; THyz = THzy
Первый индекс – направление действия силы, второй – направление, в котором материал закреплен при сдвиге.
Зависимость от относительной плотности
G yx « 6.65 p МРа , T Hyx « 0.107 p1'1 МРа. (11)
Модуль сдвига и напряжение от сил трения в других направлениях можно получить, используя зависимости (8), (9) и (10).
Интересно, что в относительных координатах
G yx
G yx
σ press
6.65 ρ 1.7
576 ρ 1.7
= 0.0115 , (12)
то есть все модули сдвига зависят только от силы прессования, причем линейно.
Модуль упругости (модуль Юнга) и напряжение трения при сжатии и растяжении
Упругая линия петли гистерезиса на сжатие и растяжение существенно нелинейна. Целесообразно описать петлю как сумму напряжения на упругой линии σL и напряжения трения σH .
с т = c L ± oH . (13)
Упругая линия и напряжение трения могут быть определены по экспериментально процессам нагрузки σ 1 и разгрузки σ 2 по уравнениям
C 1 + c 2 C 1 — c 2
c L = —2— и c H = —2— соответственно в диапазоне деформаций [0.7 A min;0.7 A max] [3]. Для направления Х этот диапазон составил sx g [ - 0.06;0.24], в направлениях Y и Z s g [ - 0.06; 0.16]. Линии cL
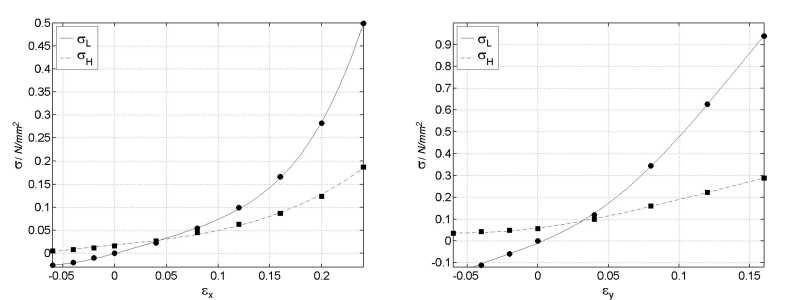
Рис. 3. Упругая линия и напряжение трения петли гистерезиса образца материала с р = 0.18 в направлениях Х и Y
и o H для относительной плотности р = 0.18 в направлениях Х и Y приведены на рис. 3.
Зависимость напряжения трения от ε удовлетворительно описывается полиномом степени 3, зависимость от ρ в направлении Х сходная с зависимостью при сдвиге (прямая пропорциональность), в направлениях Y и Z зависимость более сильная (пропорционально ρ 1.7 ).
он 2 (0.0181 + 0.231г + 0.0691г2 + Hx xx
+ 7.71г3)Г Р1
x ( 0.18 )
oHy 2 (0.0597 + 0.819 г y + 6.51 г y -
1.7
— 16.8г3)Г Р1
y ( 0.18 J
Аналогично σHz
Зависимость упругой линии от ε удовлетворительно описывается полиномом степени 4, зависимость от ρ в направлении Х сходна с σpress (пропорционально ρ 1.7 ), в направлениях Y и Z зависимость более сильная (пропорционально ρ 2 ).
o Lx 2 (0.613 + 1.771 гх - 20.4 г 2 +
+ 160г>, fр | <|6> x x ( 0.18 J oLy 2(2.69 + 14.2гy + 139гy -
— 632 г 3 ) г f P 1 (17)
y y ( 0.18 J
Аналогично σLz .
Первый сомножитель в этих произведениях аналогичен модулю упругости E .
Коэффициент рассеивания энергии в различных направлениях
Уравнения (7) – (11) и (13) – (17) дают возможность построить приблизительно петли гистерезиса (с вертикальными начальными участками нагрузки и разгрузки) и оценить коэффициент рассеивания энергии ψ . В направлении Y жесткость материала МР существенно больше, чем в направлении Х, а различие силы трения не так велико, поэтому коэффициент рассеивания энергии в направлении Х существенно больше. Например, для амлитуды деформации г = 0.1 и относительной плотности р = 0.18 получаем
— 2 1.4. С увеличением р сила трения в на-ψy правлении Y растет несколько быстрее, и различие уменьшается, но все равно при р = 0.3
получаем ^ ^ « 1.2.
ψ y
При сдвиге петля гистерезиса близка к линейной, ее площадь пропорциональна 2τγ , а потенциальная энергия деформирования пропорциональна 2 Gγ . Поэтому коэффи- цτиент рассеивания энергии пропорционален , и из уравнений (8) и (9) следует V yx : Vxy : Wzy ~ 1: 0.82 : 0.72 , а из уравнений (11) следует, что ψ при сдвиге пропорционален (р)“°-6.
Значения ψx и ψ yx сопоставимы. При
ψyx г = y = 0.1 отношение —^12 1.12, при ψx
ψyx г = y = 0.15 отношение---2 0.82 .
ψ x
Коэффициент трения
Поскольку значительная доля энергии рассеивается в виброизоляторе не при трении внутри материала МР, а при трении материала МР о стальные детали конструкции виброизолятора, необходимо знать коэффициент трения МР по стали f. Для этого обра- зец прижимался известной силой P1 и смещался силой P2 в перпендикулярном направлении. Относительная плотность ρ и направление силы (P1 в направлении прессования Х, P2 в перпендикулярном направлении Y, и наоборот) на коэффициент трения не влияют. Обнаружена слабая зависимость f от напряжPения прижатия. При малых значениях с = jy коэффициент трения f=0.1, далее он слабо растет и после с* 0.75MPa остается постоянным и равным 0,125.
Проектированиевиброзащитной системы
Рассмотрим пример проектирования виб-розащитной системы на основе полученных зависимостей для параметров материала МР. Пусть виброизолятор работает на сжатие в направлении Х или Y . Даны: масса защищаемого объекта m , требуемая резонансная частота виброзащитной системы f 0 , амплитуда действующего ускорения a , допустимое ускорение защищаемого объекта на резонансе w 0 .
По этим данным можно, используя приближенную линейную модель, найти необходимую динамическую жесткость виброизолятора kd = 4п2 f02 m,(18)
необходимый коэффициент передачи на ре- зонансе
w
П ° = "7’(19)
амплитуду деформации вaиброизолятора на резонансе
w 0
A = ^
и требуемый коэффициент рассеивания энергии 2 π
V * — η 0
.
Для обеспечения большого времени работы виброизолятора желательно, чтобы его относительная деформация не превышала 10%. Примем 8 ° = 0.1. Тогда высота упругого элемента из МР A
H = 8 • (22)
Минимальная предв0арительная стати- ческая деформация Q определяется весом защищаемого объекта. Однако она может быть увеличена при помощи дополнительного сжатия упругих элементов из материала
МР. Получаем
mg ^ C l ( 8 q ), F
Q где 8q _ H , g _ 9.81 m /52, F - площадь поперечного сечения виброизолятора.
Таким образом, виброизолятор совершает колебания между точками с относительной деформацией
Q + A
8 _ —---■ 8
1 H ; 2
_ Q - A
H
.
Тогда динамическая жесткость виброизолятора kd *
C L ( 8 1 ) + C H ( 8 1 ) - ( C L 8 2 ) - C H 8 2 ) p
F
2 A
( A l + sH ) р
2 A
где
AL = CL (81) - CL (82) ;
5H _ CH (81) + CH (82) .
Подставив в (25) уравнения (18) и (20), получаем
2w°m _ (Al + 5h )F
Площадь петли гистерезиса (предполагая, что участки первоначальной нагрузки и разгрузки – вертикальные линии) приблизительно равна
A W ' * 2 AF(cH (8 1 ) + cH ( 8 2)) _ 2 AFsH .
Поскольку реальные участки нагрузки и разгрузки криволинейны, это завышенная оценка площади петли. Используя подобие петель виброизоляторов из МР, установленное в [4], и приведенную там же линию нагрузки (или разгрузки) в обобщенных координатах, можно считать, что площадь реальной петли гистерезиса
A W * 0.75 A W' * 1.5 AFs„ .
H
Максимальная потенциальная энергия деформирования из-за несимметрии петли будет различна для нагрузки и разгрузки, поэтому для ее расчета принято среднее значение
W * 0.2 5 (( c l ( 8 1 ) + C h ( 8 1 ) - C L ( 8 0 )) +
+ ( C L ( 8 0 ) - C L ( 8 2 ) + C H ( 8 2 ))) AF _ .
_ 0.25( A L + sH ) AF
Тогда коэффициент рассеивания энергии
A W 6 sH
ш =--«---—
W A l + s- •
Из (25) A l + s -
2 Akd F
Тогда
ψ
3 Fs H Ak d .
С учетом (18) – (21), получаем
2 πma
Fs„ _----
H 3
.
Разделив почленно (28) на (29), получим
A L + sH _ 3w0
sH πa
.
Получаем следующий алгоритм проектирования виброизолятора:
-
1. Рассчитать значения A и H по уравнениям (20) и (22).
-
2. Принять некоторое значение ρ (для обеспечения минимального веса виброизоля-
-
3. Принимая ряд значений Q, получать по уравнениям (24) значения ε 1 и ε 2 , по уравнениям (14) и (16) (или по уравнениям (15) и (17) для направления, перпендикулярного направлению прессования) значения σH ( ε 1), σH ( ε 2) , σL ( ε 1) , σL ( ε 2) , по уравнениям (26) и (27) значения A L и sH , добиваться выполнения условия (30).
-
4. Если условие (30) выполнено, при помощи уравнения (29) найти значение F .
-
5. Проверить выполнение условия (23). Желательно также, чтобы е 2 > 0, иначе необходимо приклеивать материал МР к опорным поверхностям, обеспечивая работу материала на растяжение.
-
6. Если при принятом значении ρ условия (30) или (23) не выполняются ни при каком Q , увеличить значение ρ и повторить пункты 3, 4, 5. На практике p < 0.35 , и виброизолятор с такой плотностью обычно уже является чрезмерно жестким. Если изменение значения ρ не дало результата, требования к виброизолятору невыполнимы.
тора можно начинать с наименьших технологически достижимых значений, например, p _ 0.18 . При небольших требованиях к прочности виброизоляторавозможно p _ 0.15 .
Полученный алгоритм легко реализовать в виде программы для компьютера. В результате получаем высоту H и площадь сечения F виброизолятора, его относительную плотность ρ и необходимую предварительную деформацию упругого элемента Q . Этого достаточно для изготовления виброизолятора.
Проектирование виброизолятора, работающего на сдвиг, ведется аналогичным образом, с использованием уравнений (7) – (11).
Список литературы Основы проектирования систем виброзащиты с упругими элементами из материала МР
- Hongrui Ao, Hongyuan Jiang, Ulanov A.M. Dry Friction Damping Characteristics of a Metallic Rubber Isolator under Twodimensional Loading Process//Modelling and Simulation in Material Science and Engineering.-2005.-Т.13.-№4.-С. 609-620
- Чегодаев Д.Е., Мулюкин О.П., Колтыгин Е.В. Конструирование рабочих органов машин и оборудования из упругопористого материала МР. Самара: СГАУ, 1994.
- Ulanov A.M., Lazutkin G.V. Description of an Arbitrary Multi-axial Load Process for Non-linear Vibration Isolators//Journal of Sound and Vibration. 1997. №203(5).
- Расчет и конструирование средств виброзащиты сухого трения. Самара: СамГАПС, 2005.
