Основы теории робастного управления в L1 постановке

Автор: Соколов В.Ф.
Журнал: Известия Коми научного центра УрО РАН @izvestia-komisc
Рубрика: Физико-математические науки
Статья в выпуске: 3 (7), 2011 года.
Бесплатный доступ
В статье изложены основы теории робастного управления в ℓ1-постановке, зародившейся в начале 1990-х гг. Представлены базовые результаты теории, относящиеся к робастной устойчивости и робастному качеству систем с дискретным временем. Дано описание и сравнение встречавшихся в литературе постановок задач синтеза оптимальных робастных регуляторов.
Робастное управление, ограниченное возмущение, неопределенность, робастная устойчивость, робастное качество
Короткий адрес: https://sciup.org/14992464
IDR: 14992464 | УДК: 517.977
Foundations of robust control theory in the L1 setup
This paper presents foundations of robust control theory in the ℓ1 setup born in the 1990s. Basic results on robust stability and robust performance of discrete-time systems are presented. Various problems of optimal robust synthesis are described and compared.
Текст научной статьи Основы теории робастного управления в L1 постановке
Типичная зарубежная классификация основных периодов развития теории управления имеет вид [1]:
-
• Классическая теория управления – с конца XIX века до 1960 г.
-
• Современная теория управления – 1960-1980 гг.
-
• Робастное управление – с 1980 г.
В силу ряда известных причин теория робастного управления долгое время оставалась малоизвестной основной массе российских специалистов по теории управления, и исследования в области робастного управления в России были относительно немногочисленны. Цель данной статьи заключается в кратком изложении основ одного из направлений классической теории робастного управления.
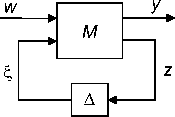
Рис. 1. M - А конфигурация.
Универсальной и общепринятой схемой описания робастных систем управления является M-∆ конфигурация, изображенная на рис. 1. Отображение M обозначает номинальную систему, ∆ – неопределенность в описании системы. Номинальную систему M называют также номинальной моделью в тех случаях, когда требуется подчеркнуть, что номинальная система является приближенным или упрощенным описанием реальной системы управле- ния. В этих случаях неопределенность ∆ называют неопределенностью модели. Сигналы w и y на рис. 1 обозначают соответственно внешний вход и выход системы, сигналы z и ξ – вход и выход неопределенности. В связи с тем, что современные системы автоматического управления в своем подавляющем большинстве строятся с использованием компьютеров, все большая доля исследований посвящается системам управления с дискретным временем t = 0, 1, 2, В случае дискретного времени сигналы в системе описываются вещественными векторными последовательностями. Компонентами внешнего входа w могут быть известные и неизвестные внешние возмущения, помехи измерений и задающие (отслеживаемые) сигналы. В качестве номинальной системы M, как правило, рассматривается линейное стационарное причинное отображение. Неопределенность ∆ предполагается неизвестной, но принадлежащей некоторому известному множеству D: ∆ ∈ D. Множество D может состоять из линейных или нелинейных, стационарных или нестационарных, а также других причинных отображений, позволяя учитывать неопределенности в параметрах системы, немоделируемую динамику, нестационар-ности, нелинейности, запаздывания и другие неопределенности в описании системы управления. В этой статье будут рассматриваться системы с линейными нестационарными или нелинейными строго причинными отображениями ∆, и неопределенность модели будет трактоваться как операторное возмущение в номинальной системе.
В общих словах предметом теории робастного управления являются анализ и синтез систем управления, обеспечивающих надлежащее качество управления при наличии неопределенности и возмущений. При этом априорная информация о системе в классических вариантах теории включает описание номинальной системы и множеств допустимых операторных и внешних возмущений.
Доминирующим направлением теории робастного управления является H ∞ -теория, в которой основным сигнальным пространством является гильбертово пространство суммируемых с квадратом сигналов (сигналов с ограниченной энергией). H ∞ -теория допускает частотные, временны́ е и вероятностные интерпретации и ей посвящены десятки монографий. Ограничимся ссылкой на одну из самых подробных и цитируемых книг [2], содержащую обширную библиографию по H ∞ -теории. Другое направление теории робастного управления имеет дело с основным сигнальным пространством ограниченных по модулю сигналов и носит название ℓ 1 -теории. Таким образом, в ℓ 1 -теории рассматриваются системы с неопределенностью и ограниченными по модулю внешними возмущениями. Такие системы представляют немалый интерес для практики, однако задачи анализа и синтеза подобных систем относятся к числу трудных (неудобных) с математической точки зрения.
Методологической базой нескольких направлений теории робастного управления стала теорема о малом коэффициенте усиления [3], гласящая, что система на рис. 1 устойчива для всех неопределенностей, коэффициент усиления которых меньше обратной величины к коэффициенту усиления отображения M . Основы ℓ 1 -теории в части анализа робастных систем были заложены в работах Хамма-ша и Пирсона [4, 5], в которых получены необходимые и достаточные условия робастной устойчивости и робастности качества систем со структурированной неопределенностью. Качество робастных систем принято оценивать в терминах наихудшего значения нормы выхода в классах допустимых возмущений. В работе [6] необходимые и достаточные условия робастной устойчивости и робастности качества получены для систем с операторными возмущениями с конечной или затухающей памятью и с фиксированными внешними входами. В [7] приведены формулы для равномерного показателя качества в задаче регулирования и для асимптотического показателя качества для систем с фиксированным внешним входом. Формулы для показателей качества систем общего вида, допускающих одновременно внешние возмущения и внешние фиксированные сигналы, получены в [8, 9].
Основными в части синтеза робастных систем в ℓ1-постановке стали работы [10,11]. В первой из них предложен удобный для компьютерной реализации метод решения стандартной задачи ℓ1-оптимизации. Во второй работе рассмотрена стандартная задача синтеза регулятора, обеспечивающего заданное качество управления. Поскольку эта задача является сложной задачей невыпуклого математического программирования, предложенное в [11] решение основано на поиске по мелкой сетке в пространстве вспомогательных параметров, число которых равно числу независимых блоков структурированной неопре- деленности. Соответствующая поисковым методам экспоненциальная оценка вычислительной сложности предложенного решения как функции параметра точности сильно ограничивает возможности его практического использования для синтеза робастного управления высокого качества.
В работах [12–16] рассматривались задачи синтеза оптимального робастного управления для объектов с возмущениями несократимых множителей передаточной матрицы номинальной системы. Одно из важных достоинств таких объектов заключается в сводимости ряда задач оптимального робастного синтеза к однопараметрическому семейству стандартных задач ℓ 1 -оптимизации, что позволяет эффективно решать эти задачи с помощью современного программного обеспечения.
По-видимому, единственной монографией, содержащей изложение базовых результатов по анализу устойчивости и качества робастных систем в ℓ 1 -постановке, является работа [17]. Однако основное содержание этой книги составляет неробастная теория ℓ 1 -оптимального управления. Литература по теории робастного управления на русском языке относительно бедна, и едва ли не единственной, дающей представление о различных направлениях современной теории робастного управления, является монография [18].
Основные понятия и обозначения. ℓ– вещественное линейное пространство вещественных последовательностей x = (x(0),x(1),x(2),...); Ip - вещественное линейное пространство векторных последовательностей x = (x 1,.. .,xp) T, xi e l; l^ - нормированное пространство ограниченных вещественных последовательностей с нормой llx^ := sup lx(k) I , x e l^ ;
k
I p = { x = ( x i ,...,x P ) T I x i e l ^ } - нормированное пространство ограниченных векторных последовательностей,
||x| := max |x i | ;
i
ℓ 1 – нормированное пространство суммируемых вещественных последовательностей с нормой
|x| 1 := £ lx ( k )I , x e I 1 ;
k =0
P k – оператор усечения на ℓ p :
Pk'x := ( x (0) ,... ,x ( k ) , 0 , 0 ,... );
q 1 -оператор сдвига назад на l p : q - 1 x ( t ) := x ( t- 1) . Отображение (система) G : I q ^ I p называется: стационарным , если q - 1 G = Gq - 1 ;
причинным , если P k G = P k GP k ^k e N ;
строго причинным , если P k G = P k GP k- 1 V k e N ;
t ^ -устойчивым , если G : l ,q ^ I P - причинный, и существует постоянная C > 0 такая, что
|Gx| < C|x| Vx e I q ( Gx := G ( x ));
Для краткости ℓ ∞ -устойчивые отображения будут называться устойчивыми . Число
||G|| := sup x̸=0
∥ Gx ∥ ∥ x ∥
называется коэффициентом усиления системы G .
Любое линейное стационарное причинное отображение M : l X ^ l X характеризуется своей матрицей импульсных характеристик
Из уравнения для сигнала z в системе (1) имеем
( I - M^ Д) z = M zw W.
м = ( M ( k )) Г 0 =
M 11
.
.
.
M p 1
M 1 q
.
.
.
M pq
Если все операторы Д e D строго причинные, то оператор (I - Mz^ Д) : ln ^ ln обратим и z = (I - Mz^ Д) -1 MzwW.
где Mij e l1 - импульсная характеристика от j-го входа к i-му выходу, и k
Mx ( t ) = ^ M ( k ) x ( t - k ) .
k =0
Функция M(A) = ^R0 M(k)Ak, A e C, называется передаточной матрицей системы M . Для устойчивой системы M коэффициент усиления равен индуцированной норме M и q
Wh = \\M ( A ) h := \\Mh 1 := max £ \\M j h 1 .
1 ≤i≤p
1. Робастная устойчивость
Ядро ℓ 1 -теории робастного управления составляют необходимые и достаточные условия робастной устойчивости системы со структурированной неопределенностью:
/ Д1 0 ... 0
0 Д2 ...0
Д =
■ .■
...
\ 0 ... Д n )
В качестве множества D допустимых неопределенностей Д сначала будет рассматриваться множество
Д n := { Д = diag(Д1 ,. . ., Д n ) | V i Д i : l o o ^ l o o - строго причинный и Ц Д | | 6 1 } .
Для упрощения изложения все диагональные блоки Д i в Д n предполагаются одномерными. Множество ∆ n представляет класс нелинейных нестационарных возмущений, однако все сформулированные ниже результаты остаются справедливыми, если сузить класс допустимых операторных возмущений до линейных нестационарных или до нелинейных стационарных.
Уравнения, описывающие систему на рис. 1, имеют вид y = Myww + My. £ z = Mzw w + Mz^ £(1)
£ = Д z, где
M = ( Myw My- )(2)
V Mzw M^()
– матрица импульсных характеристик линейной стационарной причинной номинальной системы. Для упрощения изложения сигналы w и y также считаются одномерными, так что блоки M yw , M yξ , M zw и M zξ имеют размерности 1 x 1 , 1 x n , n x 1 и n x n соответственно.
Тогда из уравнения для выхода y в системе (1) получаем y = Tдw , (3)
где оператор
Tд = Myw + My^ Д( I — Mz^ Д) Mzw называется нижним дробно-линейным преобразованием. В силу дробно-линейной формы этого преобразования систему (1) называют системой с дробнолинейным описанием неопределенности. Для каждого фиксированного оператора Д e D оператор тд описывает систему на рис. 1 как отображение пространства внешних входов w в пространство выходов y.
Определение 1. Система (1) называется робастно устойчивой в классе D , если оператор ( I - M z^ Д) - 1 является 1 ^ -устойчивыми для всех Д e D ■
Если отображение M устойчиво и система (1) робастно устойчива в классе D , то отображение T ∆ и отображение, сопоставляющее входу w выход z , являются 1.x, -устойчивыми для всех Д e D ■
Перед формулировкой основного результата по робастной устойчивости введем необходимые обозначения. Матрицу оператора M zξ представим в виде
/ M z 1 € 1 ... M z 1 ^ n \
M zS = I ■ ■ I ,
\ M z n ^ 1 . . . M z n ^ n )
и положим

\M z 1 € 1 h
.
.
.
hM z n ^ 1 h
hM z 1 S n h
.
.
.
hM z n ^ n h
R n := {R = diag( r 1 ,... ,r n ) | r i > 0 Vi } . (4)
Теорема 1 ( [4,5]) . Следующие утверждения эквивалентны:
1) Система (1) робастно устойчива в классе ∆n.
2) Система неравенств x 6 [Mz^ ]1 x не имеет ненулевых решений x e Rn, удовлетворяющих условию x > 0, где неравенства понимаются покомпонентно.
3) р([Mz^]1) < 1 (р(■) - спектральный радиус матрицы, т.е. максимальный из модулей ее собственных чисел).
4) inf HR-1MzSRh < 1.
2. Робастное качество
ReR n
Для формулировки базового результата о робастном качестве системы (1) рассмотрим вспомогательный показатель качества
J д ( M ) := WT д W ,
где T ∆ определено в (3).
Определение 2. Показатель качества J д ( M ) системы (1) называется робастным в классе операторных возмущений D , если
J д ( M ) < 1 v Д e D.
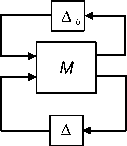
Модифицируем систему (1), положив w = Д 0 y , где Д 0 e A (1) . Модифицированная ма изображена на рис. 2
(6) в ней систе-
w
^
y
z
Рис. 2. Модифицированная система.
Теорема 2 ([5]) . Показатель качества J д ( M ) является робастным в классе ∆ n тогда и только тогда, когда система на рис. 2 робастно устойчива в классе ∆ n +1 .
Теорема 2 позволяет применить теорему 1 для оценки робастности показателя качества J д ( M ) . В частности, в силу утверждения 3 теоремы 1 показатель качества J д ( M ) является робастным в классе ∆ n тогда и только тогда, когда
Р ([ M ] 1 ) < 1 , (7)
где
/ WM yw W WM yS 1 W ... WM y^ n W \
WM z 1 w W WM z 1 5 1 W ... WM z 1 5 n W
[ M ] 1 = . . .
.. ..
\ WK w W WM z n 5 1 W ... WM z n 5 n W /
Критерий (7) можно использовать для прямого вычисления робастного качества системы (1) благодаря следующему свойству спектрального радиуса.
Лемма 1 ([7]) . Пусть A - ( n +1) x ( n +1) матрица с неотрицательными элементами,
A : =f A 11 A 12 Y A 11 e R , A 22 e R n x n .
A 21 A 22
Тогда p ( A ) < 1 , если и только если р ( A 22 ) < 1 и
F ( A ) := A 11 + A 12 ( I — A 22 ) 1 A 21 < 1 . (8)
Если не используются никакие дополнительные гипотезы о природе или свойствах возмущений, то естественным показателем качества системы (1) является наихудшее значение нормы выхода системы в классе допустимых возмущений:
J ( M ) := sup W J д ( M ) W = sup sup WT Д wW . (9)
Д € A n Д € A n ||w||< 1
Показатель качества (9) будем называть равномерным робастным показателем качества системы (1) в классе операторных возмущений ∆ n . Слово равномерный подчеркивает использование равномерной нормы пространства l ^ для оценки качества системы управления. Заметим, что в случае линейной нестационарной неопределенности отображение T ∆ линейно и поэтому его индуцированную норму WT д W можно вычислять как указано в (9).
Благодаря лемме 1 и критерию (7) можно получить следующее представление для показателя качества (9).
Теорема 3 ( [7]) . Для показателя качества (9) робастно устойчивой в классе ∆ n системы (1) справедливо представление
J ( M ) = F ([ M ] 1 ) .
Введем обозначения
[ M zw ] 1 := ( WM z 1 w W, . . . , I I M Z n W I I ) ,
[ M y5 ] 1 :=( WM y5 1 W,..., WM y5 n W ) .
Тогда формула для показателя качества с учетом определения функции F в (8) имеет вид
Jf ( M,w ) = WM yw W + [ M y5 ] 1 ( I - [ M z5 ] 1 ) “ 1 [ M zw ] 1 .
3. Асимптотическое робастное качество
Все описанные выше результаты неявно подразумевали нулевые начальные данные в системе управления. Применение этих результатов к системам с произвольными начальными данными возможно только за счет внесения значительного консерватизма, фактически обесценивающего эти результаты. Причина указанного консерватизма заключается в том, что неопределенности из класса ∆ n могут иметь сколь угодно большую память и, тем самым, оказывать негативное последействие на качество системы управления. Для получения неконсервативных условий устойчивости систем с произвольными начальными данными и оценки робастного качества систем в установившемся режиме, в работе [6] были рассмотрены более узкие, но более реалистичные классы неопределенностей с конечной и затухающей памятью. Оказалось, что изложенные выше результаты без изменений переносятся на случай таких неопределенностей и при этом открываются дополнительные возможности оценки робастного качества систем при наличии фиксированных внешних входов, например в системах слежения. Дадим краткое описание соответствующих результатов.
Последовательность векторов называется финитной , если содержит конечное число отличных от нуля элементов.
Определение 3. Причинный оператор Д : i S o ^ i S o называется оператором с конечной памятью , если он отображает финитные последовательности в такие же. Оператор Д : 1 0 ^ 1 0 называется оператором с затухающей памятью , если он отображает сходящиеся к нулю последовательности в такие же.
Все сформулированные далее результаты в равной мере справедливы для неопределенностей с конечной памятью и с затухающей памятью.
Множество
АП := { Д e A„ | Д- оператор с конечной памятью } будем называть классом (структурированных) неопределенностей с конечной памятью.
Теорема 4 ( [6]) . Система (1) робастно устойчива в классе неопределенностей ∆ Fn , если и только если система (1) робастно устойчива в классе неопределенностей ∆ n .
-
3.1. Асимптотическое робастное качество при фиксированном внешнем входе.
Пусть w – фиксированный внешний вход в системе (1). Положим
|x||ss := limsup |x(t) | t^+co для вещественной последовательности x ∈ ℓ,
[ x ] ss : = ( |x 1 ^ ss , . . . , ^x m ^ ss )
для векторной последовательности x = ( x 1 ,... ,x m ) T ∈ ℓ m ,
[ M zw w ] ss := ( IM z 1 w w ∥ ss , . . . , ∥ M z n w w ∥ ss ) , и определим блочную матрицу
IM yw w| ss [ M y^ ] 1 [ M zw w ] ss [ M ze ] 1
J e R ( n +1) x ( n +1)
M ss ( w ) : =
Рассмотрим сначала вспомогательный асимптотический показатель качества при фиксированном внешнем входе w и фиксированном операторном возмущении Д :
J д ( M, w ) := |y| ss = limsup ly ( t )I • (11)
t^ +c o
Определение 4. Показатель качества J д ( M,w ) называется робастным в классе неопределенностей D , если
J Д ( M,w ) < 1 V Д e D.
Теорема 5 ( [6]) . Пусть для внешнего входа w ∈ ℓ (последовательность w может быть неограниченной) элементы первого столбца матрицы M ss ( w ) конечны. Тогда показатель качества J д ( M,w ) является робастным в классе операторных возмущений A n тогда и только тогда, когда р ( M ss ( w )) < 1 .
Рассмотрим теперь асимптотический показатель качества, характеризующий робастное качество системы (1) в классе ∆ n F при фиксированном внешнем входе w и произвольных допустимых неопределенностях:
J p ( M,w ) := sup J д ( M,w ) .
Д E D f ( n )
Следующая теорема дает представление показателя качества J p ( M,w ) .
Теорема 6 ( [6]) . Пусть система (1) робастно устойчива в классе ∆ F n и элементы первого столбца матрицы M ss ( w ) конечны. Тогда
J p ( M,w ) = F ( M ss ( w )) .
С учетом определения функции F в (8) формула для показателя качества имеет вид
J p ( M,w ) = ||M yw w| ss + [ M y^ ] 1 Il - [ M z^ ] 1 ) “ 1 [ M zw w ] ss .
-
3.2. Асимптотическое робастное качество в задаче слежения.
Рассмотрим систему, изображенную на рис. 3 и отличающуюся от системы на рис. 1 наличием дополнительного входа r , для простоты также одномерного. Вход w будет трактоваться как неизвестное ограниченное внешнее возмущение, а вход r – как известный задающий сигнал. В задачах слежения выходом y обычно является разность выхода управляемого объекта и задающего сигнала.
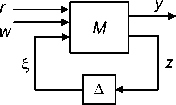
Рис. 3. Система слежения с задающим сигналом r.
Система на рис. 3 описывается уравнениями
y \ ( Myr Myw My^ ) r \ г Mzr Mzw MzC I ^ I ’ (3)
^ = Дг, где размерности блоков матрицы M импульсных характеристик системы имеют размерности, соответствующие размерностям их входных и выходных сигналов.
Поскольку внешние входы не влияют на робастную устойчивость системы, необходимые и достаточные условия робастной устойчивости системы (13) в классе неопределенностей ∆ F n остаются, в силу теоремы 4, теми же, что и в теореме 1.
Рассмотрим опять вспомогательный показатель качества для фиксированной неопределенности Д e A np :
J tr, д ( M,r ) := sup ||y| ss .
||w|| ^ < 1
Используя введенные ранее обозначения, определим матрицу
M ( r ) :=
(
[ M yr r ] ss + [ M yw ] 1 [ M zr r ] ss + [ M zw ] 1
[ M y^ ] 1
[ M z^ ] 1
Используя аналогичное введенным ранее определение робастности показателя качества J tr, д ( M,r ) , имеем следующее утверждение.
Теорема 7 ( [9]) . Пусть ∥ M yr r ∥ ss и ∥ M zr r ∥ ss конечны (что заведомо выполнено для ограниченного задающего сигнала r ). Тогда показатель качества J tr, Д ( M, r ) является робастным в классе неопределенностей А П , если и только если р ( M ( r )) < 1 .
Пусть робастное качество системы слежения (13) оценивается показателем качества
J tr ( M,r ) : = sup sup l l y^ ss . (14)
∆ ∈ ∆ F n ∥ w ∥ ∞ ≤ 1
Теорема 7 позволяет получить представления для показателя качества J tr ( M,r ) .
Теорема 8 ( [9]) . Пусть ∥ M yr r ∥ ss и ∥ M zr r ∥ ss конечны и система (13) робастно устойчива в классе ∆ nF . Тогда
J tr ( M, r ) = F ( M ( r )) .
Явное представление для показателя качества J tr ( M,r ) с учетом формулы (8) имеет вид
J tr ( M,r ) = [ M yr r ] ss + [ M yw ] 1 +
+ [ M y^ ] 1 ( I - [ M z^ ] 1 ) 1 ([ M zr r ] ss + [ M zw ] 1 ) .
-
3.3. Асимптотическое робастное качество в классе неопределенностей с ограниченной памятью.
Во всех приведенных выше результатах как внешние возмущения, так и неопределенности предполагались нормализованными, т.е ограничения на их нормы и коэффициенты усиления считались равными 1, поскольку любые другие ограничения можно учесть соответствующим изменением номинальной модели M . Поэтому априорная информация о системе в классической теории робастного управления, как отмечалось во введении, включает описание номинальной модели и верхних границ всех возмущений. Однако во многих практических задачах априорная информация является неполной или весьма неточной. В этих случаях возникают различные задачи восполнения недостающей информации по данным измерений, ставшие предметом активных исследований в течение двух последних десятилетий и образовавшие новое направление исследований под названием идентификации для робастного управления. Получить представление об этом направлении и найти обширную библиографию по нему можно, например, в последних специальных выпусках ведущих международных журналов по управлению [19, 20].
Первой и самой простой задачей в условиях неполной априорной информации можно считать задачу верификации модели, заключающуюся в проверке соответствия номинальной модели и верхних границ возмущений данным измерений. Рассмотренные в предыдущем подразделе классы неопределенностей с конечной или затухающей памятью оказываются непригодными для решения задачи верификации модели, поскольку по конечным данным измерений невозможно судить о соответствии такой модели неопределнностей данным измерений (по конечному отрезку последовательности нельзя судить, является ли она финитной или сходящейся к нулю). Для обеспечения возможности решения задачи верификации модели в [8, 9] был рассмотрен более узкий класс неопределенностей с ограниченной памятью
Аn := { A 6 An || Ax(t) | 6 max |x(t — k) | Vt } , t-µ6k6t-1
где натуральное число µ характеризует память неопределенности.
Введем робастный показатель качества слежения для системы с ограниченными возмущениями:
J tr ( M,r ) := sup sup ||y| ss .
∆ ∈ ∆ µ n ∥ w ∥ ∞ ≤ 1
Нетрудно показать, что ∆ µn ⊂ ∆ Fn . Из этого следует, что робастная устойчивость системы (13) в классе неопределенностей ∆ F n влечет ее робастную устойчивость в классе неопределенностей ∆ µn и
J tr ( M, r ) 6 J tr ( M,r ) .
В [8, 9] было показано, что верхняя оценка J tr ( M,r ) является неконсервативной при больших значениях µ при дополнительном предположении о задающем сигнале r .
Определение 5. Будем говорить, что вещественная последовательность {x ( t} ^=0 равномерно часто попадает в окрестности своего верхнего предела |x| ss , если для любого е > 0 существуют натуральное число N и строго возрастающая последовательность натуральных чисел {t j } j ∞ =1 такие, что
Vj ( t j +1 — t j 6 N A |x ( t j )I > ||x| ss — е ) .
Теорема 9 ( [9]). Пусть система (13) робастно устойчива в классе неопределенностей ∆nF, p (M (r)) > 1, и элементы первого столбца матрицы M (r) равномерно часто попадают в окрестности своих верхних пределов. Тогда lim Jtr(M,r) > 1. (15)
µ→∞
Неконсервативность верхней оценки J tr ( M,r ) устанавливается в следующей теореме.
Теорема 10 ( [9]) . Пусть система (13) робастно устойчива в классе неопределенностей ∆ Fn , и элементы первого столбца матрицы M ( r ) равномерно часто попадают в окрестности своих верхних пределов. Тогда
J tr ( M,r ) / J tr ( M,r ) при ц ^ + ^, где символ ↗ означает монотонную сходимость снизу.
Обобщения теорем 7–10 для систем с многомерными входами и выходами даны в [8]. Заметим в заключение, что точное вычисление показателя качества J tr ( M,r ) остается открытой проблемой.
4. Задачи синтеза оптимальных робастных регуляторов
При решении задач синтеза робастных регуляторов блок-схема робастной системы управления принимает вид, изображенный на рис. 4, на котором отображение P обозначает обобщенный номинальный объект управления, а отображение K – синтезируемый конструктором регулятор. Таким образом, номинальная система M характеризуется обобщенным номинальным объектом P и регулятором K :
M = M ( P, K ) .
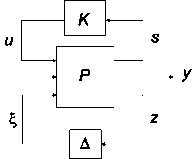
Рис. 4. Система управления с операторным возмущением.
Пусть робастное качество системы управления на рис. 4 оценивается показателем качества (9). Соответствующую этому показателю задачу inf J(M(P,K)) (16)
будем называть задачей оптимального робастного регулирования . Эта задача, не говоря уже о более сложной задаче оптимального слежения, соответствующей показателю качества (14), является сложной невыпуклой оптимальной задачей и, за исключением нескольких частных случаев, даже не формулировались в литературе по робастному управлению. Один из стандартных подходов упрощения оптимальных задач заключается в рассмотрении вспомогательной задачи нахождения регулятора K , гарантирующего выполнение неравенства
J
(
M
(
P,K
))
для заданного числа y > 0 , и в последующем поиске близкого к минимальному значения параметра γ .
Вспомогательная задача (17) решалась в [11] с помощью другой оптимальной задачи – минимизации спектрального радиуса:
i n f Р ([ M ( P,K )] 1 ) , (18)
обоснованием которой служит критерий 3) теоремы 1. Приближенное решение этой задачи сведено в [11] к решению порядка 1 /e n + n задач конечномерного линейного программирования, где ε – требуемая точность решения и n – число независимых блоков структурированной неопределенности. Указанная оценка сложности решения оказывается хуже стандартной экспоненциальной оценки сложности для методов полного перебора по сетке в силу сложности целевой функции.
Для упрощения вспомогательной задачи (17) в работах [12–16] эта задача рассматривалась для достаточно общего класса объектов управления с возмущениями несократимых множителей передаточной матрицы. Для упрощения изложения выход объекта и управление по-прежнему предполагаются одномерными.
-
4.1. Объект управления с возмущениями несократимых множителей передаточной матрицы.
Пусть объект управления описывается уравнением
a(q- 1)y(t) — q-db(q- 1)u(t) + v(t), t e N,(19)
где суммарное возмущение v в объекте имеет вид v := 8yДyy + 8uДuu + 8ww,(20)
8 y ,8 u > 0 - верхние границы операторных возмущений по выходу и управлению соответственно, 8 w > 0
– верхняя граница внешнего возмущения,
Д- ( Д’ Д ) e Л ■<
a ( q - 1 ) и b ( q - 1 ) - взаимно простые полиномы от оператора сдвига назад q - 1 (напомним, что q - 1 x ( t ) : — x ( t - 1) ):
a (q 1) — 1 + a 1 q 1 + ... + anq b (q 1) — ьо + b 1 q 1 +... + bmq m, b 0 —0, натуральное число d > 1 - запаздывание в управлении. Таким образом, функция P(А) — Adb(А)/a(А) является передаточной функцией номинального объекта, и неопределенности 8yДу и 8uДи можно считать возмущениями несократимых множителей передаточной функции.
Параметризация семейства всех регуляторов K , стабилизирующих номинальный объект управления, имеет вид [21]
K — K ( Q ):— G uv ( Q ) G yv ( Q ) - 1 , (22)
где Q ( А ) — ^ k =0 Q ( k ) А к - произвольная устойчивая передаточная функция с импульсной характеристикой Q — ( Q (0) ,Q (1) ,... ) e 1 1 ,
G yv ( Q ) — G yv ( А ) — а 0 ( А ) - А ^ Ь ( А ) Q ( А ) , G uv ( Q ) — G uv ( А ) — в 0 ( А ) - a ( А ) Q ( А )
– семейство всех устойчивых передаточных функций замкнутой системы от суммарного возмущения v к выходу y и управлению u , и полиномы а 0 ( А ) и в 0 ( А ) – фиксированные решения уравнения Безу
a ( А ) а 0 ( А ) - А ^ Ь ( А ) в 0 ( А ) — 1 .
Как правило, в качестве полиномов а 0 ( А ) и в 0 ( А ) выбираются полиномы наименьшей степени ( deg а 0 ( А ) < d + m , deg в 0 ( А ) < n ), вычисление которых сводится к решению невырожденной системы линейных уравнений относительно коэффициентов этих полиномов.
Применяя теорему 3 к системе, включающей объект (19)–(21) и регулятор (22), можно получить следующую формулу для показателя качества (9)
8 w "G yv ( Q ) "
J ( Q ): J ( ( ’ )) 1 - 8 y "G yv ( Q ) "- 8 u "G uv ( Q ) " .
(24) Необходимым и достаточным условием робастной устойчивости системы в классе неопределенностей ∆ 2 является положительное значение знаменателя в представлении (24). Это условие вводит зависящее от параметра Q ограничение на верхние границы операторных возмущений.
-
4.2. Задачи оптимального робастного синтеза для скалярного объекта и их геометрическая интерпретация.
С учетом введенных в (22) и (24) обозначений K(Q) и J(Q), отражающих зависимость регулятора K и соответствующего ему значения показателя качества от параметра Q, задача оптимального робастного регулирования (16) принимает вид nf J(Q), (25)
Q ∈ ℓ 1
и соответствующая вспомогательная задача (17) заключается в нахождении импульсной характеристики Q ∈ ℓ 1 , гарантирующей выполнение неравенства
__________ S w |G yu ( Q ) || __________ ^ y
1 — S y |G yu ( Q ) || — S u ^G uu ( Q ) ||
В силу аффинной зависимости передаточных функций G yu ( Q ) и G uu ( Q ) от импульсных откликов Q ( k ) , задачу (26) можно классифицировать как квазивы-пуклую задачу бесконечномерного дробно-линейного программирования. Для заданного значения γ неравенство (26) эквивалентно неравенству
( Y + S y ) IG yu ( Q ) | + S u |G „y ( Q ) | 6 1 • (27)
Задачу обеспечения неравенства (27) свяжем с оптимальной задачей inf vIGyu(Q)| + SulGuu(Q)|, (28)
где v := ^w + Sy . γ
Задача (28) называется задачей смешанной чувствительности, и для взаимно простых полиномов a ( А ) и b ( А ) она имеет решение для любых v > 0 , S u > 0 в силу теоремы 4 [22]. Более того, в силу теоремы 5 [22] точка минимума Q ν этой задачи является финитной последовательностью, т.е. соответствующая ей передаточная функция Q v ( А ) - полином. Заметим, что оптимальное значение показателя качества в задаче (25) есть наименьшее возможное значение параметра γ в задаче (27), которому, в свою очередь, соответствует наибольшее допустимое значение параметра ν . Положим
v * := sup { v > S y I v|G yu ( Q v ) I I + S u ||G uu ( Q v ) I I 6 1 }.
(29) Значение ν ∗ не определено, если не существует регулятора, робастно стабилизирующего объект (19), т.е. если для всех ν > δ y оптимальное значение в задаче (28) больше единицы.
Теорема 11. Пусть полиномы a ( А ) и b ( А ) взаимно простые. Тогда для любых фиксированных S y > 0 , S u > 0 либо не существует линейного стационарного регулятора, стабилизирующего объект управления (19)–(21) в классе операторных возмущений ∆ 2 , либо этот объект стабилизируем в классе операторных возмущений ∆ 2 , при этом Q ν ∗ – точка минимума в задаче оптимального робастного регулирования (25).
На рис. 5 представлена геометрическая интерпретация четырех различных задач оптимального синтеза, встречавшихся в литературе по теории робастного управления в ℓ 1 -постановке. Дадим необходимые пояснения к этому рисунку.
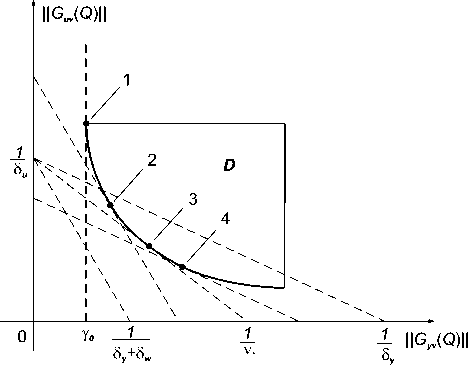
Рис. 5. Оптимальные пары ( |G y „ ( Q ) |, |G U „ ( Q ) | ) в задачах: 1 - 1 1 -оптимальное регулирование, 2 - минимальный спектральный радиус, 3 - 1 1 -оптимальное робастное регулирование, 4 - максимальный знаменатель.
Рассмотрим множество
D := { ( |G yu ( Q ) |, |G uu ( Q ) | ) | Q e 1 1 } (30)
пар норм передаточных функций G yu ( Q ) и G uu ( Q ) , соответствующих всем параметрам Q ∈ ℓ 1 , т.е. всем линейным стационарным регуляторам K , стабилизирующим номинальный объект без возмущений. Условное изображение множества D приведено на рис. 5, где множеству D соответствуют точки сверху-справа от жирной кривой. Заметим, что в силу аффинности передаточных функций G yu ( Q ) и G uu ( Q ) по Q и выпуклости по G функции ∥ G ∥ на пространстве ℓ 1 множество D является выпуклым. Поскольку любые разумные задачи синтеза робастных регуляторов ставят целью уменьшение норм передаточных функций G yu ( Q ) и G uu ( Q ) , интерес представляет только часть множества D , ограниченная сверху и справа вертикальным и горизонтальным отрезками, изображенными на рис. 5.
Рассмотрим сначала задачу ℓ 1 - оптимального регулирования
Y 0 ,|nl' |G yu ( Q ) 1 •
Q ∈ ℓ 1
Задача (31) была впервые сформулирована в [23], где было получено ее аналитическое решение для минимально-фазового объекта (т.е. в случае устойчивого полинома b(А)). Решение для произвольного скалярного объекта было получено в [24]. В работе [24] было доказано существование точки минимума в задаче (31), если полином b(А) не имеет корней на единичной окружности комплексной плоскости. Более того, минимум в этом случае достигается на финитной последовательности, т.е. оптимальная передаточная функция Q(А) является полиномом. В зарубежной литературе задача (31) была впоследствии сформулирована в [25], а ее решение на основе линейного программирования было предложено в [26, 27]. Задача (31) стала предметом нового направления математической теории управления – теории ℓ1 -оптимального управления [17, 28] и служит одной из основ ℓ1-теории робастного управления.
Пусть Q 0 – точка минимума в задаче (31). Оптимальная пара ( ^G yv ( Q 0 ) ||, ||G „v ( Q 0 ) | |) , соответствующая этой задаче, отмечена на рис. 5 цифрой 1 и является точкой пересечения множества D с вертикальной касательной к этому множеству, проходящей через точку ( y 0 , 0) .
Оптимальная пара ( || G yv ( Q v . ) ||, ||G ™( Q v . ) | |) , соответствующая решению задачи оптимального робастного регулирования (25), отмечена на рис. 5 цифрой 3. Геометрическая интерпретация этой оптимальной пары следует из определения (29) оптимального значения ν ∗ и теоремы 11. Прямая
-
V * X 1 + S u X 2 = 1 ,
где ( x 1 , x 2 ) - координаты точек прямой, является касательной к множеству D , проходящей через точку (0 , 1 /S u ) . Именно условие касания и определяет оптимальное (максимальное) значение параметра ν ∗ и соответствующее этому параметру оптимальное значение параметра Q ν ∗ . Таким образом, геометрическая интерпретация задачи оптимального робастного регулирования (25) заключается в нахождении точки касания множества D прямой, проходящей через заданную точку (о , 1 /S u ) . В следующей теореме приведены простейшие свойства ℓ 1 -оптимального робастного регулятора.
Теорема 12. 1) ℓ 1 -оптимальный робастный регулятор K ( Q opt ) для скалярного объекта (19)-(21) не зависит от верхней границы δ w внешнего возмущения и верхней границы δ y операторного возмущения по выходу.
-
2) Если в скалярном объекте (19)–(21) отсутствует операторное возмущение по управлению, т.е. S u = о , то 1 1 -оптимальный регулятор K ( Q 0 ) является и ℓ 1 -оптимальным робастным регулятором.
-
3) Для любого фиксированного значения верхней границы S u > о 1 1 -оптимальный робастный регулятор K ( Q opt ) обеспечивает наибольший промежуток допустимых значений верхней границы δ y операторного возмущения по выходу, при которых скалярный объект (19)–(21) стабилизируем в классе операторных возмущений ∆ 2 .
Дадим теперь геометрическую интерпретацию задачи минимизации спектрального радиуса (18). Оптимальная пара ( ||G yv ( Q ) ||, |G uv ( Q ) | |) , соответствующая решению этой задачи, отмечена на рис. 5 цифрой 2. Не приводя здесь детального обоснования, заметим, что эта оптимальная пара является точкой пересечения с множеством D касательной к этому множеству, имеющей вектор нормали ( S y + S w ,S u ) T . Эта геометрическая интерпретация наглядно демонстрирует, что сама по себе задача минимизации спектрального радиуса является искусственной и представляет интерес только как средство решения вспомогательной задачи (17).
Наконец, дадим геометрическую интерпретацию типичной оптимальной задачи, рассматривавшейся в литературе по робастному управлению. Напомним, что необходимое и достаточное условие робастной устойчивости системы (19)–(21) в классе операторных возмущений ∆ 2 имеет вид
S y |G yv ( Q ) | + S u |G uv ( Q ) || < 1 . (32)
Поскольку в классических вариантах теории робастного управления верхние границы возмущений считаются учтенными в передаточных матрицах (что позволяет полагать S y = S u = 1 ), условие робастной устойчивости записывается в “нормализованной” форме
|G yv ( Q ) | + |G uv ( Q ) | < 1 .
На основании этого стандартная постановка задачи оптимального робастного синтеза имеет вид nf |Gyv (Q) || + |Guv (Q) || (33) Q∈ℓ1
и называется задачей обеспечения наибольшей области устойчивости (см., например, [29]). Если явно учитывать верхние границы возмущений, то задачу (33) следует записывать в виде inf Sy !Gyv(Q)|| + Su|Guv(Q)||. (34) Q∈l1
Строго говоря, для систем со структурированной неопределенностью, т.е. при n > 2 , задача обеспечения наибольшей области устойчивости не имеет корректной постановки, и решение задачи (34) не обеспечивает максимизацию области устойчивости в пространстве верхних границ δ y , δ u (соответствующие области робастной устойчивости зависят от отношения δ y /δ u ). Постановка задачи максимизации области робастной устойчивости корректна только для систем с неструктурированной неопределенностью, т.е. при n = 1 (см. краткую формулировку теоремы о малом коэффициенте усиления, приведенную во введении). Именно эта задача была главным мотивом разработки H ∞ -теории управления, ядра современной теории робастного управления (см. введение в [2]). Из представления (24) нетрудно видеть, что задача (34) является по существу задачей максимизации знаменателя в показателе качества задачи оптимального робастного регулирования (25). Таким образом, задача (34) представляет интерес не сама по себе, а только как средство для решения более слабой задачи обеспечения робастной устойчивости, т.е. выполнения неравенства (32). Оптимальная пара ( ^G yv ( Q ) |, ||G uv ( Q ) | ) задачи (34) отмечена на рис. 5 цифрой 4 и является точкой пересечения с множеством D касательной к этому множеству, имеющей вектор нормали ( S y ,S u ) T .
Возвращаясь к задаче оптимального регулирования (25) после описанной выше ее геометрической интерпретации заметим, что множество (30) заранее неизвестно и его приближенное описание требует значительных вычислений. Однако эти вычисления не являются необходимыми для решения задачи (25). Алгоритмы решения задачи оптимального робастного регулирования для скалярного объекта управления приведены и обоснованы в [14, 15], а их обобщения для многомерных объектов получены в работах [12, 16].
В статье рассматривались только “классические” задачи робастного управления, в которых номинальная система и верхние границы возмущений предполагаются известными и не рассматривались задачи для систем с неполной априорной информацией, включающие задачи верификации модели, идентификации систем и адаптивного управления.
Список литературы Основы теории робастного управления в L1 постановке
- Goodwin G.C., Graebe S.F. and Salgado M.E. Control Systems Design. Prentice Hall, Upper Saddle River, New Jersey, 2001 (русский перевод: Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э. Проектирование систем управления. М.: Бином. Лаборатория знаний, 2004).
- Zhou K., Doyle J.C., Glover K. Robust and optimal control. Prentice-Hall Inc. Upper Saddle River. N.J. 1996.
- Zames G. On the input-output stability on nonlinear time-varying feedback systems. Part I: Conditions derived using concepts of loop gain, conicity and positivity//IEEE Transactions on Automatic Control. 1966. Vol. 11. P. 228-238.
- Khammash M., Pearson J.B. Analysis and design for robust performance with structured uncertainty//Systems and Control Letters. 1993. Vol. 20. P. 179-187.
- Khammash M., Pearson J.B. Performance Robustness of Discrete-Time Systems with Structured Uncertainty//IEEE Transactions on Automatic Control. 1991. Vol. 36. P. 398-412.
- Khammash M.H. Robust steady-state tracking//IEEE Transactions on Automatic Control. 1995. Vol. 40. P. 1872-1880.
- Khammash M.H. Robust Performance: Unknown Disturbances and Known Fixed Inputs//IEEE Transactions on Automatic Control. 1997. Vol. 42. P. 1730-1P734.
- Соколов В.Ф. Асимптотическое робастное качество дискретной системы слежения в £1-метрике//Автоматика и телемеханика, 1999. № 1. С. 101-112.
- Sokolov Vol.F. £1 robust performance of discretetime systems with structured uncertainty//Systems and Control Letters. 2001. Vol. 42(5). P. 363-377.
- Khammash M.H. A new approach to the solution of the £1 control problem: the scaled-Q method//IEEE Transactions on Automatic Control. 2000. Vol. 45. P. 180-187.
- Khammash M., Salapaka M.V., Voorhis T.V. Robust Synthesis in £1: A Globally Optimal Solution//IEEE Transactions on Automatic Control. 2001. Vol. 46. P. 1744-1754.
- Соколов В.Ф. Синтез £1-субоптимальных робастных регуляторов для многомерных объектов при возмущениях несократимых множителей//Доклады Академии наук, 2001. Т. 381. №. 4. С. 463-468.
- Соколов В.Ф. Синтез £1-субоптимального робастного регулятора для линейного скалярного объекта с неструктурированной неопределенностью//Автоматика и телемеханика, 2001. № 1. С. 150-163.
- Соколов В.Ф. Синтез £1-субоптимального робастного регулятора для линейного дискретного скалярного объекта со структурированной неопределенностью//Автоматика и телемеханика, 1999. № 11. C. 80-99.
- Sokolov V.F. £1 Optimal Robust Controller for SISO Plant under Coprime Factor Perturbations//IEEE Transactions on Automatic Control. 2000. Vol. 45. P. 2339-2345.
- Sokolov V.F. Suboptimal robust synthesis for MIMO plant under coprime factor perturbations//Systems and Control Letters. 2008. Vol. 57(4). P. 348-355.
- Dahleh MA. and Diaz-Bobillo I.J. Control of uncertain systems: a linear programming approach. Englewood Cliffs. NJ:Prentice-Hall. 1995.
- Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. М.: Наука, 2002.
- Ljung L. and Vicino A. (Eds.) Special Issue on System Identification//IEEE Transactions on Automatic Control. 2005. Vol. 50. No. 10.
- Soderstrom T., Van Den Hof P., Wahlberg B. and Weiland S. (Eds.) Special Issue on Data-Based Modelling and System Identification//Automatica. 2005. Vol. 41. No. 3.
- Фомин В.Н., Фрадков А.Л., Якубович ВА. Адаптивное управление динамическими объектами. М.: Наука, 1981.
- McDonald J.C. and Pearson J.B. l1 -optimal control of multivariable systems with output norm constraints//Automatica. 1991. Vol. 27. 317-329.
- Якубович Е.Д. Решение задачи оптимального управления линейным дискретным объектом//Автоматика и телемеханика. 1975. № 9. С. 73-79.
- Барабанов А.Е., Граничин О.Н. Оптимальный регулятор линейного объекта с ограниченной помехой//Автоматика и телемеханика, 1984. № 5. С. 39-46.
- Vidyasagar M. Optimal rejection of persistent bounded disturbances//IEEE Transactions on Automatic Control. 1986. Vol. 31. P. 527-534.
- Dahleh M.A., Pearson J.B. £1 -optimal-feedback controllers for discrete-time systems//Proc. American Control Conference. 1986. Seattle, WA, June, P. 1964-1968.
- Dahleh MA, Pearson J.B. £1-optimal feedback controllers for MIMO discrete-time systems//IEEE Transactions on Automatic Control. 1987. Vol. 32. P. 314-322.
- Барабанов А.Е. Синтез минимаксных регуляторов. С.-Петербург: Изд-во С.-Петербургского ун-та, 1996.
- Dahleh M.A. BIBO stability robustness in the presence of coprime factor perturbations//IEEE Transactions on Automatic Control. 1992. Vol. 37. P. 352-355.
