Особенности баланса потерь мощности в электронасосных агрегатах систем терморегулирования космических аппаратов

Автор: Бобков А.В., Цветков Е.О.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационно-космическое машиностроение
Статья в выпуске: 1-2 т.13, 2011 года.
Бесплатный доступ
В статье проведён анализ баланса потерь мощности в электронасосных агрегатах (ЭНА) систем терморегулирования космических аппаратов. Установлено, что при уменьшении мощности ЭНА потери в электроприводе в общем балансе потерь агрегата приобретают характер доминирующего фактора.
Электронасосный агрегат, мощность, ротор, трение
Короткий адрес: https://sciup.org/148199615
IDR: 148199615 | УДК: 621.671:
Features of capacity losses balance in electropump agregates of space vehicles thermoregulation systems
In article the analysis of capacity losses balance in electropump aggregates (EPA) of space vehicles thermoregulation systems is carried out. It is established that at reduction of capacity in EPA loss in the electric drive in general balance of aggregate losses get character as dominating factor.
Текст научной статьи Особенности баланса потерь мощности в электронасосных агрегатах систем терморегулирования космических аппаратов
Электронасосные агрегаты (ЭНА) малой мощности (N≤300 Вт) обеспечивают циркуляцию жидкого теплоносителя по замкнутым контурам системы терморегулирования (СТР) космических аппаратов (КА). Повышение энергетической эффективности ЭНА является актуальной проблемой совершенствования систем терморегулирования КА. Представление об эксплуатационных показателях некоторых ЭНА даёт таблица 1 с данными из [1] по различным вариантам насосных агрегатов СТР. Диапазон изменения параметров ЭНА составляет: расход рабочего тела V=(80-130)⋅10-6 м3/с, потребляемая мощность N=(4-40) Вт, число оборотов n=(2800-4500) об/мин, ресурс работы от 25000 до 50000 часов.
Таблица 1. Технические характеристики ЭНА СТР
|
Условное обозначение ЭНА |
Электропривод |
Число оборотов, об/мин |
Расход теплоносителя, м3/с |
Потребляемая мощность, Вт |
Ресурс работы, час |
|
2428-0 |
БЭП-121Г |
4500 |
10-4 |
25 |
44000 |
|
2125-0 |
ДБ 9/К30 |
4900 |
13 ⋅ 10-5 |
22 |
50000 |
|
4430-0 |
БЭП-121Г |
4800 |
12 ⋅ 10-5 |
22 |
44000 |
|
2237-0 |
БПС-202 |
2800 |
80 ⋅ 10-6 |
14 |
25000 |
Традиционный подход в области гидромашиностроения при рассмотрении баланса заключается в пренебрежении потерями в электроприводе и сведению анализа к потерям в проточной полости насоса. Такой подход оправдан для гидромашин наземного базирования, в которых привод и насос расположены в разных, не сообщающихся друг с другом полостях, заполненных воздухом (привод) и жидкостью (насос). В ЭНА СТР электропривод погружён в теплоноситель и указанный выше подход может привести к неадекватной оценке баланса потерь в агрегате, т.к. в этом случае игнорируются потери вязкостного трения в приводной части ротора ЭНА.
Цветков Евгений Олегович, аспирант
В энергетических системах космических аппаратов применяются бесконтактные электроприводы, в которых отсутствует щёточноколлекторный узел. Контактный износ этого узла в агрегатах первых КА существенно снижал ресурс их работы. Переход к бесконтактным электроприводам позволил разместить привод и насос в одной полости, убрав уплотнение по валу между насосной (зона I, рис. 1) и приводной частями агрегата (зона II, рис. 1), заполнив эту полость рабочим телом. «Энергетической платой» за такое конструктивное решение стало увеличение потерь мощности N тр на трение о теплоноситель за счёт приводной части ротора. При этом надо отметить, что суммарные потери мощности N ∑ в электроприводе ЭНА складываются ещё из нескольких составляющих:
N = N + N + N + N
S ст тр.р м д где Nст - потери в стали якоря от гистерезиса и вихревых токов; Nтр.р - потери трения на роторе; Nм - потери в меди обмоток; Nд - добавочные потери при нагрузке.
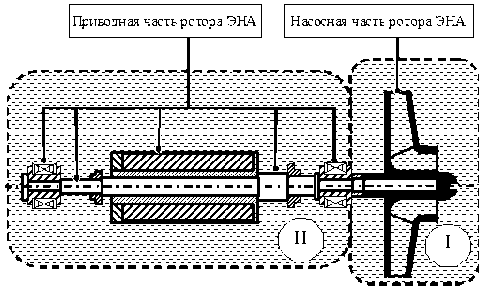
Рис. 1. Структурное деление ЭНА: I – центробежный насос; II – электропривод
Проанализируем потери мощности, обусловленные трением жидкости о ротор, состоящий из 2-х частей: насосной и приводной, расположенных в одной, заполненной рабочим телом, полости. ЭНА КА относятся к миниатюрным нагнетателям, в которых диаметральные размеры насосной и приводной части ротора соизмеримы. Потери трения Nтр.р на роторе зависят от вида поверхности вращения и складываются из 2-х составляющих: потерь трения о торцовые поверхности ротора и потерь трения о цилиндрические поверхности ротора. В ЭНА первый вид потерь является преобладающим для насосной части, а второй вид для приводной части ротора. Для рационализации конструкции ротора ЭНА необходимо отдельно оценивать потери мощности от трения на насосной Nнтр.р и приводной частях пр н пр тр.р ротора, где Nтр.р= тр.р + тр.р .
В качестве примера, иллюстрирующего возможности оптимизации конструкции ротора, исследуем баланс потерь трения в ЭНА с электродвигателем ДБ-9 и параметрами: напор Н=60 Дж/кг; расход теплоносителя V =140 - 10 -6 м3/c и число оборотов n=6000 об/мин; зазор А =0,3 - 10-3 м; вязкость рабочего тела v =0,7 - 10-6 м2/с; плотность рабочего тела р =691 кг/м3; скорость жидкости в зазоре между ротором и корпусом v=15 - 10-6 м3/с, диаметр РК dрк= 40 - 10 — 3 м. Расчётное значение удельного веса потерь в насосной части ротора, включающей элемент с наибольшим диаметром – рабочее колесо (РК), в рассматриваемом ЭНА составит N нтр.р N тр.р =0,844. Таким образом, на насосную часть ротора приходится наибольшая часть потерь трения.
Зависимость (Nтр.р )i ~ dрi, указывает на целесообразность снижения диаметральных размеров насосной части ротора, в частности, диаметра РК dрк. Одним из конструктивных приёмов уменьшения диаметра dрк является переход к многоступенчатому ЭНА. Парамет- рическим следствием этого становится рост коэффициента быстроходности каждой ступени ns. Рассмотрим возможность снижения Nнтр.р Nтр.р путём увеличения числа ступеней ЭНА СТР до 2-х и 3-х, считая, что коэффициент напора каждой ступени будет оставаться неизменным, H=0,587. При переходе в ЭНА от одно к двухступенчатому варианту dрк должен уменьшиться с 32-10-3 м до 23-10-3 м, а в трехступенчатом ЭНА до 19-10-3 м. Коэффициент быстроходности ступени вырастает, соответственно, с ns=67 до ns=112 и ns=152. Относительная величина потерь трения в насосной части ротора Nнтр.р Nтр.р при увеличении числа ступеней снижается до 0,677 в 2-х ступенчатом варианте ЭНА и до 0,549 в 3-х ступенчатом ЭНА, соответственно, на 20% и 35% по сравнению с исходным уровнем Nнтр.р Nтр.р =0,844. Такие изменения параметров ЭНА являются приемлемыми с технологической и положительными с энергетической точек зрения. Рассмотренный способ снижения потерь трения о ротор ЭНА приемлем и для других лопаточных машин малой мощности, например, компрессоров или вентиляторов авиакосмического назначения, радиальные размеры приводной и нагнетательной частей ротора которых соизмеримы. Его реализация позволяет снизить потери трения о ротор и уменьшить мощность, потребляемую агрегатом.
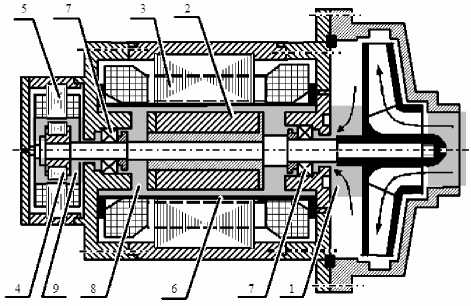
Рис. 2. Элементный состав привода ЭНА:
1 – задняя боковая пазуха центробежного насоса; 2 – приводная часть ротора; 3 – статор привода; 4 – ротор датчика положения; 5 – статор датчика положения; 6 – экран; 7 – подшипник качения; 8 – полость вокруг ротора, заполненная теплоносителем; 9 – полость вокруг ротора положения, заполненная теплоносителем;
заливка – теплоноситель
Проведём анализ уровня потерь мощности N птрр.р , учитывая элементный состав приводной части ротора ЭНА. Электропривод, кроме собственно бесконтактного двигателя с m-фазной обмоткой на статоре и возбужденным ротором, состоит датчика положения ротора и коммутатора, осуществляющего по сигналам датчика положения коммутацию токов в обмотках статора привода [2]. Приводная часть ротора (поз. 2, рис. 2) выполняется в виде постоянного магнита. Статор привода (поз. 3) представляет собой наружный корпус, с запрессованным в нём пакетом активного железа. В пазах пакета проложена обмотка. Экран (поз. 6), установленный между ротором и статором, выполняется из немагнитной нержавеющей стали в виде цилиндра, герметично соединенного с корпусом привода и плотно прилегающего к внутренней поверхности статора. Кпд экранированных электроприводов ниже, чем у обычных, вследствие дополнительных потерь в экране и в зазоре между ротором и статором. Зазор может достигать величины порядка 0,8 ⋅ 10-3 м , включая толщину экрана. В одном корпусе с приводом находится датчик положения, включающий в себя ротор (поз. 4) и статор (поз. 5). Ротор датчика положения имеет вид сегмента (скошенного цилиндра), расположенного на одном валу с двигателем. Сегмент выполняет функцию сигнального элемента датчика положения. На статоре датчика положения располагаются чувствительные элементы. Их число равно числу обмоток привода, а положение соответствует положению соответствующих обмоток. Статор и ротор приводной части ЭНА разделены экранирующей гильзой, что даёт возможность погружения приводной части ротора в жидкий теплоноситель. Из-за этого появляются потери трения этой части ротора о теплоноситель, входящие в состав потерь мощности на трение.
На выходном участке ротора закреплено рабочее колесо. Ротор вращается в подшипниках (поз. 7, рис. 2), установленных во втулках торцовых крышек. Циркуляция обеспечивается соединением полости нагнетания насоса (задней боковой пазухи поз. 1) и внутренней полости электропривода через зазоры между статичными элементами статора и ротора привода, а также статора и ротора датчика положения.
Проведём численную оценку уровня потерь мощности N птрр.р для реальных условий эксплуатации электропривода в составе ЭНА. В расчёте применим параметры, близкие к реальным условиям: диапазон изменения угловой частоты вращения задавался равным ω =(315-600) с-1, вязкость теплоносителя ν =10-3 м2/с,. r р =12,5 ⋅ 10-3 м, L р =50 ⋅ 10-3 м, ρ =691 кг/м3, Δ =0,3 ⋅ 10-3 м. Значения потерь мощности на приводной части ротора составили N птрр.р =(3-8) Вт при полезной мощности ЭНА N пол =(14-25) Вт.
Вывод: потери мощности на трение приводной части ротора способны достигать до 57%. При снижении полезной мощности ЭНА и уменьшении диаметра d рк потери в электроприводе начинают приобретать характер доминирующих в общем балансе потерь агрегата. Одним из конструктивных вариантов решения проблемы может стать совмещение функций привода и насоса в одном элементе – рабочем колесе насоса, у которого торцевые стенки выполняют функции якоря привода.
Список литературы Особенности баланса потерь мощности в электронасосных агрегатах систем терморегулирования космических аппаратов
- Бобков, А.В. Центробежные насосы систем терморегулирования космических аппаратов. -Владивосток: Дальнаука, 2003. 217 с.
- Юферов, Ф.М. Электрические машины автоматических устройств. -М.: Высш. шк., 1988. 479 с.
