Особенности цифрового управления двигателя-маховика АО "Корпорация "ВНИИЭМ" для высокодинамичных космических аппаратов

Автор: Бабишин Владимир Денисович, Дементьев Дмитрий Юрьевич, Мартынов Владимир Сергеевич, Михайлов Михаил Александрович, Некрасов Владимир Викторович, Соболев Дмитрий Юрьевич, Соседко Ксения Андреевна
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Системный анализ, управление и обработка информации
Статья в выпуске: 2 (25), 2019 года.
Бесплатный доступ
Появление радиационно-стойкой микроконтроллерной техники открыло новые возможности в управлении двигателя-маховика и, следовательно, в целом космическим аппаратом. Отсутствие импортонезависимого двигателя-маховика, обладающего передовыми возможностями по сравнению с отечественными и зарубежными аналогами, сделало необходимой разработку нового поколения двигателей-маховиков с цифровым микроконтроллерным управлением в АО «Корпорация «ВНИИЭМ». Такой двигатель-маховик разрабатывается как быстродействующий исполнительный орган системы ориентации и стабилизации высокодинамичного космического аппарата (максимальный управляющий момент нового двигателя-маховика - 1 Нм). В статье изложены следующие особенности создания цифрового микрокон-троллерного управления нового двигателя-маховика: организация обратной связи по скорости вращения ротора; описание основных режимов управления; рассмотрение вариантов выхода на требуемую скорость вращения ротора и автоматическая самодиагностика.
Двигатель-маховик, цифровое управление, микроконтроллерное управление, ао "корпорация "внииэм"
Короткий адрес: https://sciup.org/143172128
IDR: 143172128 | УДК: 621.333.3-529:629.78.05 | DOI: 10.33950/spacetech-2308-7625-2019-2-107-114
Features of digital control of flywheel engine, JSC Corporation VNIIEM for high-dynamic spacecraft
The development of radiation-resistant microcontroller technology opened new possibilities for controlling the flywheel engine and, consequently, the whole spacecraft. The lack of import-independent flywheel engine having the advanced capabilities as compared with domestic and foreign analogs made it necessary to develop a new generation of flywheel engines with digital micro controller-based control at JSC Corporation VNIIEM. Such a flywheel engine is being developed as a fast-acting actuator of the orientation and stabilization system of a high-dynamic spacecraft (the maximum control moment of the new flywheel engine is 1 Nm). Such features of creating digital microcontroller-based control of a new flywheel engine as organizing the flywheel engine rotor rate feedback, consideration of the basic control modes of the flywheel engine and options for reaching the required rotor rate of the flywheel engine, as well as self-diagnostics not only controlling but automatically updating the diagnosed parameters of the flywheel engine are given in this article.
Текст научной статьи Особенности цифрового управления двигателя-маховика АО "Корпорация "ВНИИЭМ" для высокодинамичных космических аппаратов
Для осуществления управления различными космическими аппаратами (КА) в качестве исполнительного органа системы ориентации и стабилизации применяются двигатели-маховики (ДМ). С появлением микроконтроллерной техники появились новые возможности в управлении ДМ.
22 июля 2012 г. [1] был запущен российский спутник дистанционного зондирования Земли «Канопус-В» (рис. 1) [2]. Данный КА работает в интересах Роскосмоса, МЧС, Минприроды, Росгидромета, РАН. Он служит для картографирования, мониторинга чрезвычайных ситуаций, в т. ч. пожаров, для оперативного наблюдения заданных районов [3]. Космический аппарат «Канопус-В» изготовлен АО «Корпорация «ВНИИЭМ» совместно с британской компанией Surrey Satellite Technology Limited ( SSTL ) [4].

Рис. 1. Общий вид космического аппарата «Канопус-В»
На КА «Канопус-В» компания SSTL установила не только такое оборудование как бортовой вычислительный комплекс, звездные датчики, ДМ, солнечные датчики, магнитометры, магнитные катушки, кабельная сеть, GPS- и ГЛОНАСС-антенны, но и программное обеспечение, системы ориентации и стабилизации КА. Одна из основных особенностей ДМ компании SSTL — обеспечение возможности высокоточной стабилизации скорости ротора ДМ, позволяющее бороться с различными моментами при стабилизации КА. Отсутствие импортонезависимого ДМ, обладающего передовыми возможностями, сделало необходимой разработку нового поколения ДМ в АО «Корпорация «ВНИИЭМ».
Постановка решаемых задач
Оценив совместную работу с компанией SSTL , проанализировав доступную информацию производителей (НПЦ «Полюс» [5], НИИ командных приборов, американской корпорации Honeywell и др.) и взяв за основу накопленный опыт разработки ДМ в АО «Корпорация «ВНИИЭМ» [6, 7], специалисты АО «Корпорация «ВНИИЭМ» приняли решение о создании ДМ с цифровым микроконтроллерным управлением (ДМ-МК) (рис. 2), которое должно решить следующие задачи:
-
• разработка схемы микроконтроллерного управления ДМ с организацией обратной связи по скорости вращения ротора ДМ;
-
• разработка алгоритма управления ДМ в следующих режимах: управление величиной крутящего момента; управление величиной скорости вращения ротора ДМ (как аналог управлению ДМ SSTL , где вариантом пропорционально-интегрально-дифференциального регулирования (ПИД–регулирования) реализованы режим выхода в заданную скорость и высокоточная ее стабилизация); управление в случае нештатной потери связи с бортовым комплексом управления (БКУ);
-
• разработка программного обеспечения, позволяющего обеспечивать прием и логическую обработку сигналов с электромеханического блока (ЭМБ); формирование сигналов управления ЭМБ; прием и логическую обработку сигналов с БКУ по мультиплексному каналу обмена (МКО) [8]; формирование телеметрической информации для передачи по МКО в БКУ.

Рис. 2. Общий вид двигателя-маховика с цифровым управлением
Построение концептуальной модели для решения поставленных задач
За основу разработки концептуальной модели взята аналоговая схема ДМ, разработанного и выпускаемого АО «Корпорация «ВНИИЭМ» (ДМ20-250) [7], маховичный электропривод которого выполнен на основе бесконтактного электродвигателя постоянного тока (БДПТ) (рис. 3). В БДПТ задача управления вращающим моментом сводится к управлению током в якорной обмотке, поскольку магнитный поток, возбуждаемый магнитами, практически постоянен [9]. В схеме управление уровнем тока в обмотке двигателя осуществляется регулятором тока, работающим в режиме широтноимпульсной модуляции по внешнему управляющему сигналу, формируемому микроконтроллерным модулем (МКМ). В настоящее время схема ЭМБ проходит модернизацию.
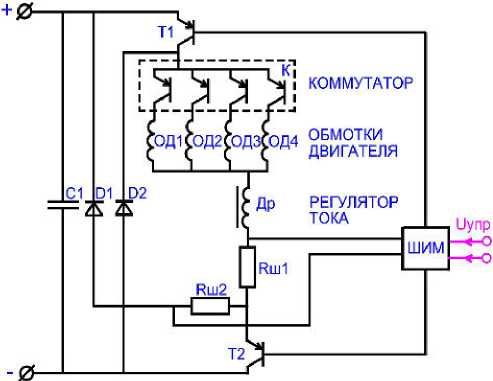
Рис. 3. Упрощенная принципиальная схема бесконтактного электродвигателя постоянного тока
Для организации обратной связи по скорости вращения ДМ в схему введен оптоэлектрический датчик скорости [10], представляющий собой блок излучающих диодов и фотодиодов. Оптоэлектрический датчик формирует 1 360 импульсов за оборот. Информация с датчика скорости для дальнейшей обработки поступает в МКМ (рис. 4).
ДВИГАТЕЛЬ - МАХОВИК
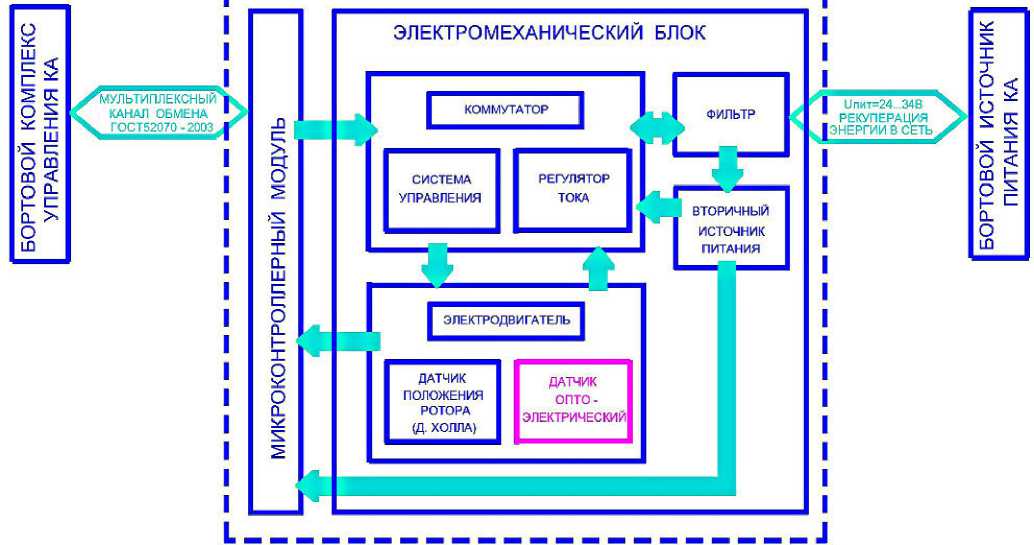
Рис. 4. Функциональная блок-схема двигателя-маховика с цифровым управлением
МКМ разработан на базе применяемого в изделиях АО «Корпорация «ВНИИЭМ» унифицированного МКМ управления для систем ориентации солнечных батарей КА [11].
МКМ обеспечивает цифровое управление ДМ и выполняет следующие задачи:
-
• прием и логическая обработка сигналов контроля с ЭМБ;
-
• формирование сигналов управления ЭМБ;
-
• прием и логическая обработка сигналов с БКУ по МКО (ГОСТ 52070-2003);
-
• формирование телеметрической информации для передачи по МКО в БКУ.
Цифровая схема управления, реализованная МКМ, обеспечила управление в двух режимах: по заданному крутящему моменту (режим управления моментом) и по частоте вращения ротора (режим управления скоростью). Ранее режим управления скоростью не использовался в разработках ДМ АО «Корпорация «ВНИИЭМ».
В режиме управления моментом МКМ по сигналам от БКУ формирует необходимое аналоговое управляющее напряжение (рис. 5), пропорционально которому ЭМБ создает крутящий момент на валу ДМ.

СИГНАЛЫ УПРАВЛЕНИЯ:
- ВЫБОР РЕЖИМА
- КОМАНДЫ УПРАВЛЕНИЯ ДАННОГО РЕЖИМА

СИГНАЛЫ КОНТРОЛЯ:
- КОД РЕАЛЬНОЙ СКОРОСТИ РОТОРА
- НАПРАВЛЕНИЕ ВРАЩЕНИЯ РОТОРА
- ИНФОРМАЦИЯ О ИСПРАВНОСТИ
ДВИГАТЕЛЬ - МАХОВИК
СИГНАЛЫ УПРАВЛЕНИЯ:
СИГНАЛЫ КОНТРОЛЯ:
■ НАПРЯЖЕНИЕ УПРАВЛЕНИЯ МОМЕНТОМ ВРАЩЕНИЯ РОТОРА (Uynp)
■ НАПРАВЛЕНИЕ ВРАЩЕНИЯ РОТОРА
МУЛЬТИПЛЕКСНЫЙ КАНАЛ ОБМЕНА
ГОСТ52070 - 2003
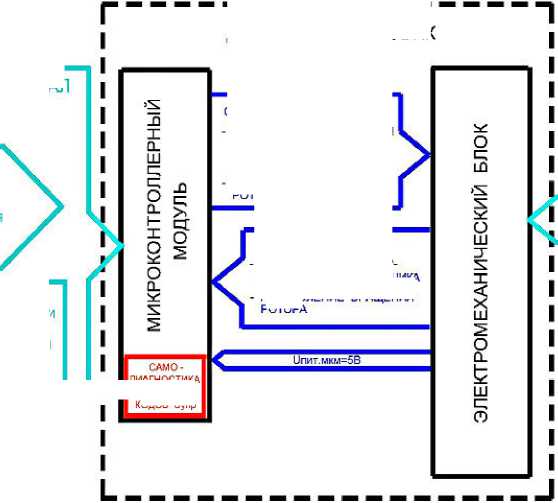
Рис. 5. Сигналы управления и контроля двигателя-маховика
-
- ИНФОРМАЦИЯ С ОПТОЭЛЕКТРИЧЕСКОГО ДАТЧИКА
-
- НАПРАВЛЕНИЕ ВРАЩЕНИЯ РОТОРА
ипит=24...34В
РЕКУПЕРАЦИЯ ЭНЕРГИИ В СЕТЬ

ДИАГНОСТИКА
ТАБЛИЦЫ
КОДОВ Uynp
В режиме управления скоростью по команде от БКУ вращение ротора ДМ-МК обеспечивается в диапазоне возможных требуемых скоростей –2 600…+2 600 об/мин с шагом 1 об/мин, где знак — направление вращения ротора.
По команде от БКУ разгон или торможение ДМ можно осуществить следующим образом (рис. 6):
-
• по варианту классического ПИД – регулятора , где при максимально удачном подборе коэффициентов без перерегулирования невозможно сделать устойчивой требуемую скорость с необходимой погрешностью за максимально короткое время во всем диапазоне требуемых скоростей;
-
• по варианту высокоскоростного пропорционально-интегрально-дифференциального регулятора (ВС-ПИД – регулятора), обеспечивающего без перерегулирования за максимально короткое
время выход и стабилизацию требуемой скорости. Данный инновационный вариант ВС-ПИД — регулятора разработали, руководствуясь концепцией создания быстродействующей системы, необходимой для обеспечения управления высокодинамичным КА (управляющий момент ДМ-МК — до 1 Н·м).
В варианте ВС-ПИД – регулятора разгон/торможение осуществляются на максимально допустимом значении управляющего напряжения:
U c = U max , (1)
где Uc — управляющее аналоговое напряжение ЭМБ; U max — максимально допустимое напряжение.
МКМ оценивает величины ускорения вращения ротора и ошибки требуемой скорости. Как только прогнозируемое ускорение сможет за один такт преодолеть оставшуюся ошибку, сформируется необходимое пропорциональное управляющее аналоговое напряжение, необходимое для выхода на требуемую скорость:
ПИД – регулятора, Yd — дифференциальное звено ПИД – регулятора.
U = c
Y i = Y c.t. k ;
U max - Y
∆ E
MAX
E
/ ( X + Y),
где Yi — интегральное звено ПИД – регулятора; Yc.t. — табличное значение кода интегрального звена, соответствующего требуемой скорости вращения ротора ДМ; k — корректирующий коэффициент значения Yc.t. ; ∆ E max — максимально возможное значение изменения ошибки за время сбора и обновления информации о реальной скорости вращения ротора ДМ; E — ошибка значения скорости (разность между требуемой и реальной скоростями); x — корректирующий коэффициент варианта требуемой новой скорости.
Далее, в интегральное звено ВС-ПИД – регулятора закладывается оптимальное значение управляющего напряжения из таблицы кодов, отработанной для всего диапазона скоростей (рис. 7), а управление осуществляется с помощью усовершенствованного ПИД – регулирования, включающего в себя отсутствие интегрального насыщения, плавное «безударное» переключение коэффициентов ПИД – регулятора во время вращения ротора и т. д.:
Ya =Yp + Yi + Yd ;
U c = Y a ,
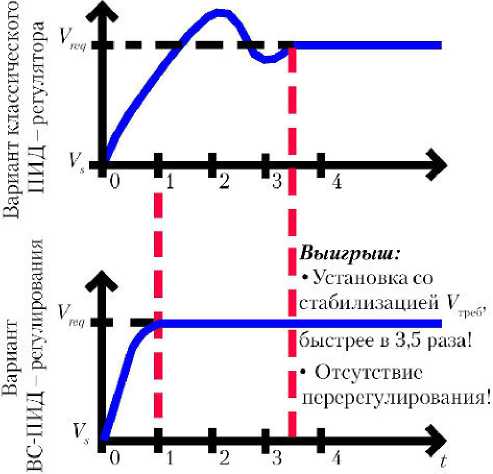
Рис. 6. Варианты алгоритмов выхода на требуемую скорость Примечание. ВС-ПИД–регулятор — высокоскоростной пропорционально-интегрально-дифференциальный регулятор; Vreq — требуемая скорость вращения ротора ДМ; Vs — значение скорости вращения ротора ДМ в момент времени поступления требования об установке нового значения Vreq .
Установка новой требуемой скорости на макете обеспечила более чем трехкратный выигрыш во времени (во всем диапазоне скоростей).
В программные алгоритмы введена самодиагностика системы. Самодиагностика осуществляет не только контролирующую функцию с последующей передачей информации в БКУ, но и автоматическую коррекцию диагностируемых параметров.
где Ya — сумматор звеньев ПИД – регулятора; Yp — пропорциональное звено
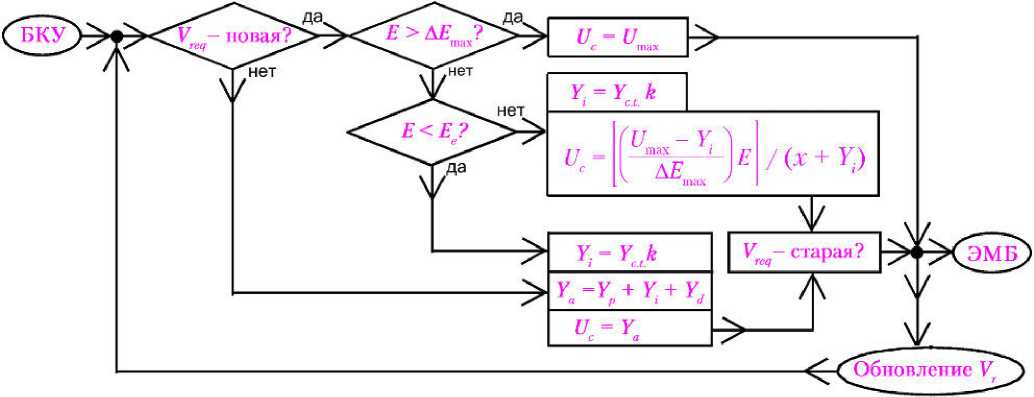
Рис. 7. Схема варианта высокоскоростного пропорционально-интегрально-дифференциального регулятора
Примечание. Ее — допустимое значение Е для перехода на ПИД–регулирование; Vr — реальная скорость вращения ротора ДМ; Vreq — требуемая скорость вращения ротора ДМ. Также см. обозначения к формулам (1)–(3).
Например, введена корректировка таблицы кодов числовых значений, устанавливаемых в интегральное звено в алгоритме ВС-ПИД – регулятора. Такая методика управления позволяет обеспечивать стабильные технические характеристики, несмотря на возможную нелинейность передаточной функции и износ системы в течение всего времени эксплуатации.
При нештатной потере связи с БКУ космического аппарата ДМ переходит в автономный режим управления (возврат вращения ротора до скорости последнего достоверного сообщения с БКУ).
Вся элементная база узлов разрабатываемого изделия соответствует ограничительному перечню для разработки военной и специальной техники.
результаты проведенной работы
Отработка программного обеспечения цифрового микроконтроллерного управления осуществлялась на макете ДМ-МК. Основные технические характеристики ДМ-МК:
управляющий момент 1 Нм; кинетический момент ±10 Нмс;
диапазон изменения частоты вращения ±2 600 об/мин;
максимальный потребляемый ток 10 А;
число импульсов на оборот 1 360;
масса 8 кг;
напряжение питания 24….34 В;
тип ОЭВМ, используемой в МКМ 1880ВЕ81У;
такт общения с БКУ КА 125 мс;
срок службы не менее 12 лет.
Допустимое отклонение частоты вра- щения ротора в режиме управления по скорости ДМ-МК:
-
• при неизменной заданной частоте — не более 1 об/мин;
-
• при темпе изменения заданной частоты не более 1 000 об/мин² — не более 2 об/мин;
-
• при темпе изменения заданной частоты вращения в диапазоне 1 000…8 000 об/мин² — не более 10 об/мин.
Полученные результаты испытаний подтвердили выполнение поставленных задач и соответствуют ожидаемым характеристикам создаваемого ДМ-МК. Внедрение двигателя-маховика с цифровым микроконтроллерным управлением планируется в 2019 г.
заключение
По итогам проделанной работы построена концептуальная модель решения задачи и сделаны выводы о приемлемости данного решения как аналога управления на КА «Канопус-В».
При шаге такта общения с БКУ, равного (или меньшего) 125 мс при различных темпах изменения заданной частоты, теоретически можно обеспечить оптимальное решение, где минимальное отклонение частоты вращения ротора составит не более 1 об/мин. Поэтому определены более жесткие требования к разрабатываемому изделию, и сформулирована следующая научная задача [12]:
Дано: основные технические характеристики ДМ-МК (см. выше по тексту) и новые требования к допустимому отклонению частоты вращения ротора в режиме управления по скорости ДМ-МК:
-
• при неизменной заданной частоте — не более 1 об/мин;
-
• при темпе изменения заданной частоты не более 1 000 об/мин² — не более 1 об/мин;
-
• при темпе изменения заданной частоты вращения в диапазоне 1 000…8 000 об/мин² — не более 1 об/мин.
Найти: функцию управления ДМ-МК в режиме заданной скорости.
Авторы выражают признательность сотрудникам АО «Корпорация «ВНИИЭМ» Макриденко Л.А., Сарычеву А.П., Меду-шеву С.В., Рогозе А.В., Щетинину М.Ю., Кузьмину В.К., Городецкому Р.С., Кубра-ку В.К., Соколунину И.В. за обеспечение возможности создания и отработки цифрового управления на образцах двигателей-маховиков, разработанных и выпускаемых АО «Корпорация «ВНИИЭМ».
Список литературы Особенности цифрового управления двигателя-маховика АО "Корпорация "ВНИИЭМ" для высокодинамичных космических аппаратов
- Запуск: Канопус-В и Белорусский КА, launch Kanopus-V. Режим доступа: https://youtu.be/10rTez2CLFI (дата обращения 18.01.2018 г.).
- ОАО «Российские космические системы». Космический аппарат типа «Канопус-В». Режим доступа: http:// russianspacesystems.ru/bussines/dzz/ orbitalnaya -gruppirovka-ka -dzz/kanopus-v/ (дата обращения 18.01.2018 г.).
- Госкорпорация Роскосмос. Космический комплекс «Канопус-В». Режим доступа: https://www.roscosmos.ru/24985/ (дата обращения 13.03.2019 г.).
- SSTL delivers on Russian KANOPUS missions // SSTL, 06 March 2009. Режим доступа: https://www.sstl.co.uk/space-portfolio/ aunched-missions (дата обращения 13.03.2019 г.).
- АО «НПО «Полюс». Режим доступа: http://polus.tomsknet.ru (дата обращения 18.01.2018 г.).
- АО «Корпорация «ВНИИЭМ». Режим доступа: http://www.vniiem.ru (дата обращения 18.01.2018 г.).
- Журавлев В.Я., Кузьмин В.Н., Михайлов Е.М., Рудобаба Е.П., Стома С.А. Электродвигатель-маховик постоянного тока. М.: Труды ВНИИЭМ, 1985. Т. 78. С. 67-74.
- ГОСТ Р 52070-2003. Интерфейс магистральный последовательный системы электронных модулей. Общие требования. М.: ИПК Издательство стандартов, 2003.
- Анучин А.С. Системы управления электроприводами. М.: Издательский дом МЭИ, 2015. 373 с.
- Калачев Ю.Н. Векторное регулирование (заметки практика). М.: Эфо, 2013. 66. с.
- Некрасов В.В., Щетинин М.Ю. Унифицированный модуль управления СОСБ малых КА на основе микроЭВМ. М.: Труды НПП ВНИИЭМ, 2008. С. 46-50.
- Бабишин В.Д., Некрасов В.В., Соседко К.А. Постановка научной задачи по разработке нового двигателя-маховика для управления малыми космическими аппаратами // Труды МКЭЭЭ-2018, 24-28 сентября 2018 г., Алушта. С. 149-151.
