Особенности динамики стыковки космических аппаратов при использовании периферийного механизма с накоплением кинетической энергии сближения

Автор: Яскевич Андрей Владимирович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 4 (27), 2019 года.
Бесплатный доступ
К настоящему времени на основе международного стандарта систем стыковки IDSS национальными космическими агентствами и частными компаниями разработано несколько вариантов систем стыковки. Стыковочные механизмы этих систем основаны на различных принципах конструирования и управления. Проект нового стыковочного механизма с более простой кинематикой и конструкцией, чем в предшествующем стыковочном агрегате АПАС, разработан также в Ракетно-космической корпорации «Энергия». В этом механизме используется накопление кинетической энергии сближения космического аппарата вместо традиционного демпфирования. Это позволяет выдвигать стыковочное кольцо вперед для улучшения сцепки и обеспечивать торможение. В работе описываются основные особенности динамики стыковки космических аппаратов при использовании этого механизма.
Космический аппарат, стыковочный механизм, динамика стыковки
Короткий адрес: https://sciup.org/143172149
IDR: 143172149 | УДК: 531.39:629.78.077 | DOI: 10.33950/spacetech-2308-7625-2019-4-109-120
Spacecraft docking dynamic features by using a peripheral mechanism with accumulation of approach kinetic energy
Up to now, several docking systems have been developed under the International Docking System Standard (IDSS) by national space agencies and private companies. Docking mechanisms of these systems are based on different design and control principles. Thus a new peripheral docking mechanism, with more simple kinematics and design than that used in previous APAS docking unit, has been developed by Rocket and Space Corporation Energia. An accumulation of spacecraft approach kinetic energy instead of traditional damping is used in this mechanism. It allows to move forward the docking ring for capture improvement and to ensure slowdown. Main features of spacecraft docking dynamic process with the use of this mechanism are described in this paper.
Текст научной статьи Особенности динамики стыковки космических аппаратов при использовании периферийного механизма с накоплением кинетической энергии сближения
ЯСКЕВИЧ А.В.
Различные варианты реализации международного стандарта систем стыковки
Международный стандарт систем стыковки IDSS [1] был разработан на основе геометрии интерфейса периферийного агрегата стыковки АПАС-89/95 разработки РКК «Энергия» (цифры обозначают его различные версии). В стыковочных агрегатах (СтА), соответствующих стандарту, используется три типа механизмов — сцепки, герметизации стыка и стыковочные механизмы (СтМ). В первых двух из них геометрия и, фактически, кинематика запирающих звеньев определены стандартом. Их управляемое движение имеет одну степень свободы, поэтому варьироваться может только способ передачи движения от привода. Стыковочные механизмы, определяющие динамику стыковки, имеют шесть степеней свободы и поэтому могут отличаться кинематикой и принципом действия. К настоящему времени разработано несколько вариантов систем, соответствующих IDSS . Ниже коротко рассматриваются отличия в реализации их СтМ, которые во многом определяют потребительские свойства этих систем.
Основой кинематики СтМ IBDM [2, 3] является платформа Гью–Стьюарта [4, 5]. Штоки штанг представляют собой винты, которые связаны с моментными электродвигателями (ЭД) приводов с помощью шарико-винтовых преобразователей (ШВП). Штанги имеют максимальный угол наклона. Поэтому суммарная сила, развиваемая всеми приводами, недостаточна для преодоления силы сопротивления толкателей, электро-и гидроразъемов при стягивании СтА. СтМ является полностью управляемым, т. е. перемещение штоков всех штанг на всех этапах стыковки определяется сигналами управления, поступающими от цифрового контроллера на автономные приводы каждой штанги. Стыковочное кольцо СтМ выдвигается вперед вдоль своей оси из некоторого исходного положения (ИП) при получении сигнала первого контакта от датчиков сил, расположенных вдоль продольных осей штанг. Система управления заставляет двигаться механизм так, чтобы минимизировать действующие на него боковые контактные силы. Тем самым кольцо СтМ подстраивается под положение кольца пассивного СтА. При достаточном сближении их плоскостей срабатывают механические защелки, происходит сцепка. Пассивные, механические устройства поглощения энергии сближения космических аппаратов (КА) отсутствуют. Демпфирование осуществляется ЭД, работающими после сцепки и до стягивания в генераторном режиме. Малый КПД при работе ЭД в таком режиме частично компенсируется большой величиной их приведенной к кольцу инерции.
Основой кинематики СтМ системы NDS [6] также является платформа Гью– Стьюарта со штоками-винтами и ШВП. Так же, как и в IBDM , относительная простота конструкции СтМ обеспечивается применением электроприводов, которые обеспечивают выдвижение стыковочного кольца вперед, навстречу пассивному СтА, для достижения сцепки. При этом вычисляется и задается требуемое угловое положение гаек ШВП, что соответствует линейному ходу винтов. Управление приводами СтМ основано на концепции SIMAC [7] мягкого соединения и поглощения энергии, на которую выдан патент [8]. В соответствии с ней вращение каждого ЭД является нерегулируемым. Действующие на кольцо СтМ контактные силы препятствуют выдвижению штоков и уменьшают скорости вращения валов ЭД, увеличивая электромагнитный момент в соответствии с их нагрузочной характеристикой. При превышении пускового момента ЭД переходит в генераторный режим. В результате кольцо СтМ, двигаясь под действием внешней контактной силы, подстраивается под кольцо ответного пассивного СтА. Вследствие принятой концепции податливость СтМ при сцепке может быть обеспечена только при ограниченной мощности ЭД, в противном случае кольцо механизма будет отталкивать пассивный КА. Поэтому даже при меньшем угле наклона штанг (как у АПАС-89/95) силы, развиваемые СтМ NDS при стягивании СтА, недостаточны для преодоления сопротивления толкателей расстыковки, электро- и гидроразъемов.
Общими характерными особенностями СтМ, в которых скоротечный процесс достижения механической сцепки реализован с использованием электрических машин, являются сложное управление и высокое энергопотребление, необходимость уменьшения диапазона начальных условий (НУ) стыковки, слабое демпфирование после сцепки, малая величина силы стягивания и как следствие этого — необходимость использования отдельных приводов для толкателей, электро- и гидроразъемов.
Кинематика СтМ компании SpaceX основана на платформе Ханта [9]. Реализуется принцип пассивной сцепки, т. е. стыковочное кольцо не выдвигается вперед, механические защелки срабатывают только за счет кинетической энергии сближения активного КА. Не используются штоки-винты и ШВП, что частично упрощает конструкцию. Выбранный тип платформы обуславливает малый ход устройств демпфирования и, соответственно, невысокую энергоемкость СтМ, необходимость сужения диапазона НУ стыковки.
Китайский периферийный стыковочный агрегат [10], использованный для стыковки пилотируемого корабля Shenzhou 8 к орбитальной станции Tiangong 1, практически полностью повторяет АПАС-89/95, высокую конструктивную сложность его СтМ. Предложенная в работе [11] замена в этом механизме блока дифференциалов на три ЭД в парах штанг лишь частично решает эту проблему. Сохранение при этом механизмов связи штанг в парах не способствует улучшению сцепки при наличии боковых промахов и рассогласований по крену на момент первого контакта агрегатов.
АПАС-89/95 соответствует IDSS, но его СтМ отличается высокой сложностью и большой трудоемкостью изготовления. Его уникальная способность стыковать корабли типа Space Shuttle в новых космических программах является невостребованной, так как в соответствии с IDSS активные КА будут иметь массу не более 25 т, симметрично распределенную относительно осей их систем координат. Поэтому в РКК «Энергия» разработан проект нового, более простого периферийного СтМ, в котором не используeтся связанное движение штанг, а традиционное демпфирование энергии сближения КА заменено ее накоплением пружинными механизмами с управляемой блокировкой отдачи [12]. Используемые для этого устройства характеризуются низким энергопотреблением [13]. Стягивание СтА обеспечивается тросовым устройством СтМ с одним приводом, которое создает силу, достаточную для преодоления сопротивления толкателей, электро-и гидроразъемов. Накопление механической энергии позволяет обеспечить быстрое выдвижение стыковочного кольца вперед из ИП для достижения сцепки и высокую энергоемкость механизма, что существенно при парировании возможных нештатных ситуаций при сближении. Математическая модель динамики стыковки с использованием этого механизма описана в работах [14–16].
Проектный диапазон и экспертные варианты начальных условий стыковки
Проектный диапазон НУ стыковки задается в виде набора максимальных значений скоростей активного и пассивного КА, относительных боковых и угловых смещений активного и пассивного СтА на момент их первого касания. Он отражает степень неопределенности, которая существует на начальном этапе создания системы сближения активного КА. После завершения ее разработки проводится статистическое моделирование, которое показывает, что в большинстве сочетаний случайных значений упомянутых выше параметров начальных условий их максимальные величины достигают ~30% от разрешенных проектных. Лишь в отдельных случаях достигается максимальное значение какого-либо параметра, но при этом значения остальных приближаются к нулю. Это соответствует штатной работе системы сближения и подтверждается статистикой ее летных испытаний.
Проектирование системы стыковки осуществляется параллельно, т. е. при отсутствии статистических данных о распределении случайных значений параметров НУ. Используется проектный диапазон НУ, при этом предполагается, что максимальных значений могут достигать несколько, в наихудших сочетаниях — все параметры НУ. Такие сочетания разрабатываются проектировщиками системы стыковки и называются экспертными. Если число статистических вариантов составляет несколько сотен или даже тысяч, то число экспертных обычно не превышает одной-двух сотен. Стандарт IDSS допускает наличие максимальных значений одновременно всех параметров НУ стыковки и использование при необходимости реактивной системы управления (РСУ) активного КА для создания продольной силы «дожатия» для ускорения сцепки. В экспертных вариантах допускается одновременное достижение максимальных значений бокового и углового отклонений и соответствующих им скоростей, но совпадение знаков таких отклонений и скоростей интерпретируется как серьезное нарушение штатного режима, так как система сближения должна стремиться компенсировать имеющиеся рассогласования. Проведено предварительное исследование динамики стыковки к МКС (максимально допустимая IDSS масса пассивного КА) активного КА с инерционными характеристиками, соответствующими массе 25; 10 и 5 т в таблице 3.3.1.2-1 IDSS.
Динамика стыковки в экспертных вариантах начальных условий
Основными функциями СтМ являются обеспечение сцепки, поглощение энергии сближения с ограничением интерфейсных нагрузок, стягивание и выравнивание активных и пассивных СтА и КА. Ниже приводятся результаты моделирования динамики стыковки, демонстрирующие возможности нового механизма при экспертных НУ стыковки. В момент начала моделирования осевое расстояние между центрами стыковочных колец СтА составляет ~20 мм.
Так как основная часть кинетической энергии активного КА приходится на его осевое сближение с пассивным, то максимальная по амплитуде интерфейсная сила имеет место при так называемом «центральном ударе», когда только один параметр НУ — осевая скорость сближения — имеет максимально допустимое значение. Графики на рис. 1 отражают следующие особенности этого экстремального варианта:
-
• ПМ штанг при любом ходе штоков обеспечивают силу сопротивления, превышающую внешнюю контактную силу, необходимую для срабатывания защелок, расположенных на направляющих выступах стыковочного кольца. Поэтому при центральном ударе сцепка происходит до потери ИП штанг и блокирует выдвижение кольца вперед из ИП.
-
• Вследствие деформаций кинематических цепей одновременно всех штанг имеет место динамический пик (импульс) интерфейсной силы. Вследствие малой массы подвижных частей штанг его длительность, равная ~0,016 с, в 6,7 раза меньше, а амплитуда, равная 694 кгс, на 32 кгс больше соответствующих допустимых стандартом величин. Таким образом, импульс силы при стыковке новым АПАС примерно в 6,4 раза меньше импульса, допустимого стандартом.
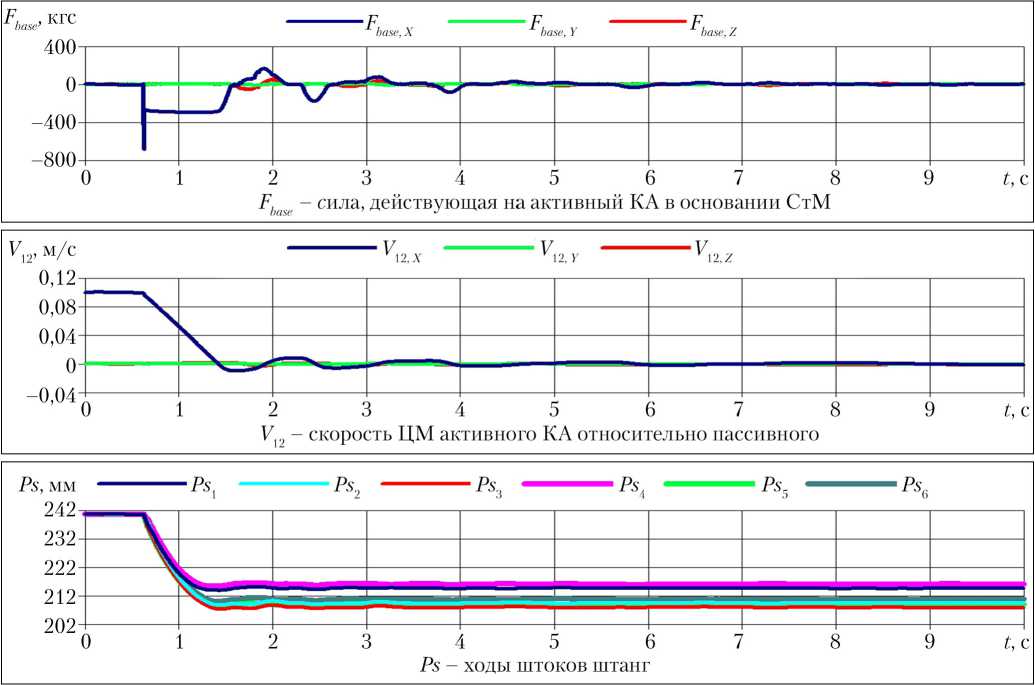
Рис. 1. Поглощение энергии сближения с максимальной скоростью активного КА при центральном ударе (время сцепки равно 0,61 с)
Амплитуда силы при поглощении основной части кинетической энергии сближения не превышает 300 кгс, что на 56 кгс меньше допустимой стандартом величины. Вследствие этих же деформаций имеют место затухающие колебания интерфейсных сил, амплитуда которых не превышает 200 кгс.
-
• Ходы штоков штанг не превышают 35 мм, т. е. не более 15% максимально допустимого хода. Это указывает на большой запас энергоемкости СтМ, на возможность стыковки с большей — нештатной — скоростью сближения.
Сочетания параметров НУ, критичные по критерию достижения сцепки, отличаются минимально допустимой скоростью сближения, максимальными боковыми и угловыми рассогласованиями и скоростями активного СтА. Предлагаемая таблица содержит данные о времени сцепки для некоторых экспертных вариантов НУ стыковки, в которых максимальное значение принимает один и более параметров. В ней приведены только те столбцы, которые содержат ненулевые значения параметров. В частности, VX — скорость сближения активного КА вдоль продольной оси X ; Vz , A Z — боковая скорость и боковой промах вдоль поперечной оси Z ;
ю X — скорость вращения относительно оси X ; ю Y — скорость вращения относительно поперечной оси Y ; ф X , ф Y — углы поворота относительно осей X и Y ; FX РСУ — сила «дожатия» вдоль оси X , создаваемая РСУ активного КА; t СЦ — время сцепки. Скорость VX = 0,05 м/с — минимально допустимая; параметры Vz = 0,04 м/с; ю X = 0,2 ° /с; ю Y = 0,2 ° /с; A Z = 0,10 м; ф X = 4,0 ° и ф Y = 4,0 ° — максимально допустимые.
Из таблицы видно, что наиболее критичным параметром НУ по критерию времени достижения сцепки является боковой промах. При его максимально допустимом значении первый контакт СтА происходит при большом удалении стыковочных колец СтА. Если этот промах является единственным экстремальным параметром (вариант 1 ), то при первом контакте энергии бокового движения недостаточно для потери сигнала ИП в контактном устройстве какой-либо из штанг. СтА продолжают сближаться за счет скорости активного КА, потеря ИП и выдвижение кольца СтМ вперед происходят, когда расстояние между кольцами мало. Время сцепки, превышающее 3 с после первого контакта, обусловлено их начальным удалением (рис. 2).
Достижение сцепки при различных экспертных вариантах начальных условий стыковки (параметры начальных условий пояснены в тексте)
|
№ вар-та |
V X |
V Z |
Ш X |
Ш Y |
A Z |
ф X |
ф Y |
FX РСУ |
СЦ |
|
м/с |
° /с |
м |
° |
кгс |
с |
||||
|
Масса активного КА 10 т |
|||||||||
|
1 |
0,05 |
— |
— |
— |
0,10 |
— |
— |
— |
3,548 |
|
2 |
0,05 |
0,04 |
— |
— |
0,10 |
— |
— |
— |
Нет сцепки |
|
2а |
0,05 |
0,04 |
— |
— |
0,10 |
— |
— |
40 |
2,113 |
|
3 |
0,05 |
0,01 |
0,20 |
0,05 |
0,05 |
4,0 |
2,0 |
— |
2,229 |
|
4 |
0,05 |
0,01 |
0,05 |
0,05 |
0,10 |
2,0 |
2,0 |
— |
3,621 |
|
5 |
0,05 |
0,04 |
0,05 |
0,05 |
0,05 |
2,0 |
2,0 |
— |
0,527 |
|
6 |
0,05 |
— |
0,20 |
0,20 |
0,10 |
4,0 |
4,0 |
— |
3,546 |
|
Масса активного КА 5 т |
|||||||||
|
6 |
0,05 |
— |
0,20 |
0,20 |
0,10 |
4,0 |
4,0 |
— |
3,753 |
|
Масса активного КА 25 т |
|||||||||
|
2 |
0,05 |
0,04 |
— |
— |
0,10 |
— |
— |
— |
3,133 |
|
7 |
0,05 |
0,04 |
0,20 |
0,20 |
0,10 |
4,0 |
4,0 |
— |
Нет сцепки |
|
7а |
0,05 |
0,04 |
0,20 |
0,20 |
0,10 |
4,0 |
4,0 |
40 |
3,383 |
|
8 |
0,10 |
0,04 |
0,20 |
0,20 |
0,10 |
4,0 |
4,0 |
— |
2,651 |
Если максимальный промах сопровождается боковой скоростью того же знака (вариант 2), то при первом же контакте СтА энергии бокового движения достаточно для потери сигнала ИП в контактном устройстве какой-либо штанги. Блокировка отдачи ПМ выключается, кольцо выдвигается вперед, устраняя боковой промах. Но из-за большого начального расстояния между кольцами и ограниченного хода штоков штанг сцепка не достигается, КА расходятся под действием сил, создаваемых ПМ СтМ (рис. 2 и 3).
Вариант 1


Снятие блокировки отдачи ПМ штанг и ее восстановление после сцепки
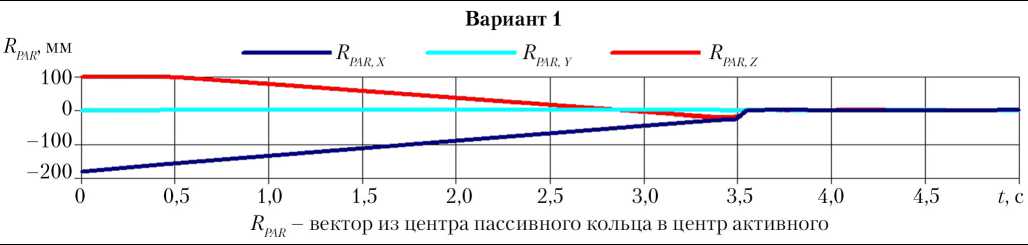
Вариант 2

F — контактная сила, действующая на стыковочное кольцо СтМ
Вариант 2

Снятие блокировки отдачи ПМ штанг без восстановления, сцепка не достигнута
Рис. 2. Достижение (вариант1) и отсутствие (вариант 2) сцепки при максимальном боковом промахе (масса активного
КА равна 10 т): 1 — первый контакт СтА; 2 — снятие блокировки отдачи ПМ; 3 — включение блокировки отдачи ПМ после сцепки
Сцепка в варианте 2 при стыковке КА массой 10 т обеспечивается при включении при потере ИП силы «дожатия», создаваемой РСУ (см. вариант 2а ), а при максимальной массе корабля, равной 25 т, — без использования РСУ. Сцепка также достигается при боковом промахе и боковой скорости того же знака, если эти параметры не принимают одновременно своих максимально допустимых значений (см. варианты 3–6 ). При этом максимальный боковой промах, увеличивающий начальное расстояние между СтА, более критичен, чем максимальная боковая скорость.
В варианте 6 все параметры, кроме VZ , принимают максимальные значения, знаки отклонений и соответствующих скоростей совпадают. Тем не менее, при таком критичном сочетании НУ сцепка достигается даже при стыковке активного КА минимальной массы, равной 5 т. Для этого варианта на рис. 4–6 приведены графики изменения интерфейсных сил и моментов, кинематических параметров. Они демонстрируют следующие особенности процесса стыковки с использованием СтМ нового АПАС при данном сочетании НУ:
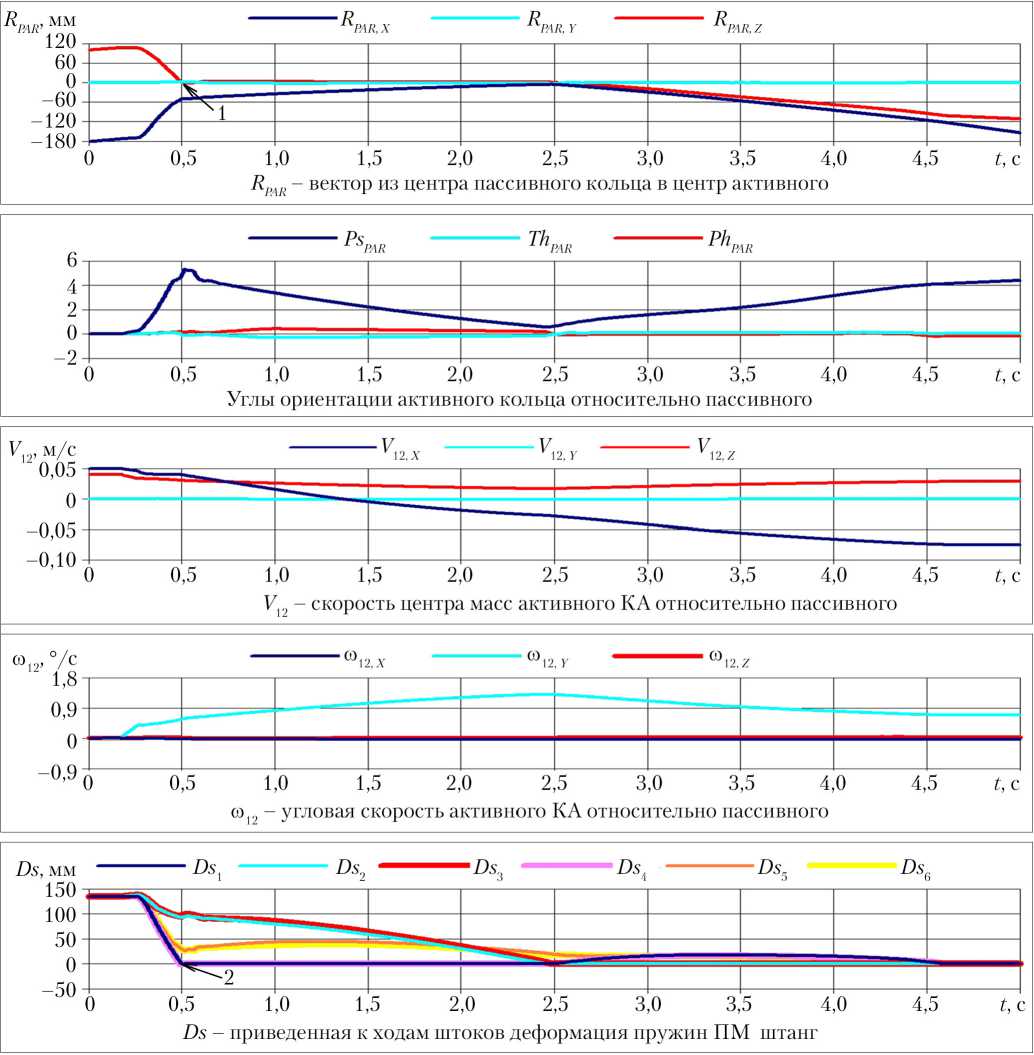
Рис. 3. Отсутствие сцепки из-за преждевременного выдвижения СтМ из ИП в варианте 2 (масса активного КА равна 10 т): 1 — компенсация бокового промаха при выдвижении СтМ вперед из ИП; 2 — выход штоков штанг 1 и 4 в ПП (исчерпание их хода)
-
• выдвижение кольца СтМ вперед из ИП начинается с большой задержкой с момента первого контакта СтА при достаточно большом сопротивлении ПМ штанг, и именно это помогает сцепке — она достигается до исчерпания хода штоков штанг;
-
• выдвижение кольца происходит очень быстро вследствие малой инерции штанг и кольца, а также — достаточной величины сил, создаваемых ПМ штанг. Поэтому освобождаемая энергия ПМ штанг не приводит к отталкиванию инерционных КА;
-
• в процессе достижения сцепки кольцо СтМ подстраивается под положение пассивного кольца под действием сил, создаваемых ПМ штанг, в соответствии с конкретными контактными реакциями, определяемыми относительным положением стыковочных колец. Это свойство радикально отличает СтМ нового АПАС от периферийного СтМ с дифференциальными связями, который использовался в предшествующем СтА АПАС-89/95;
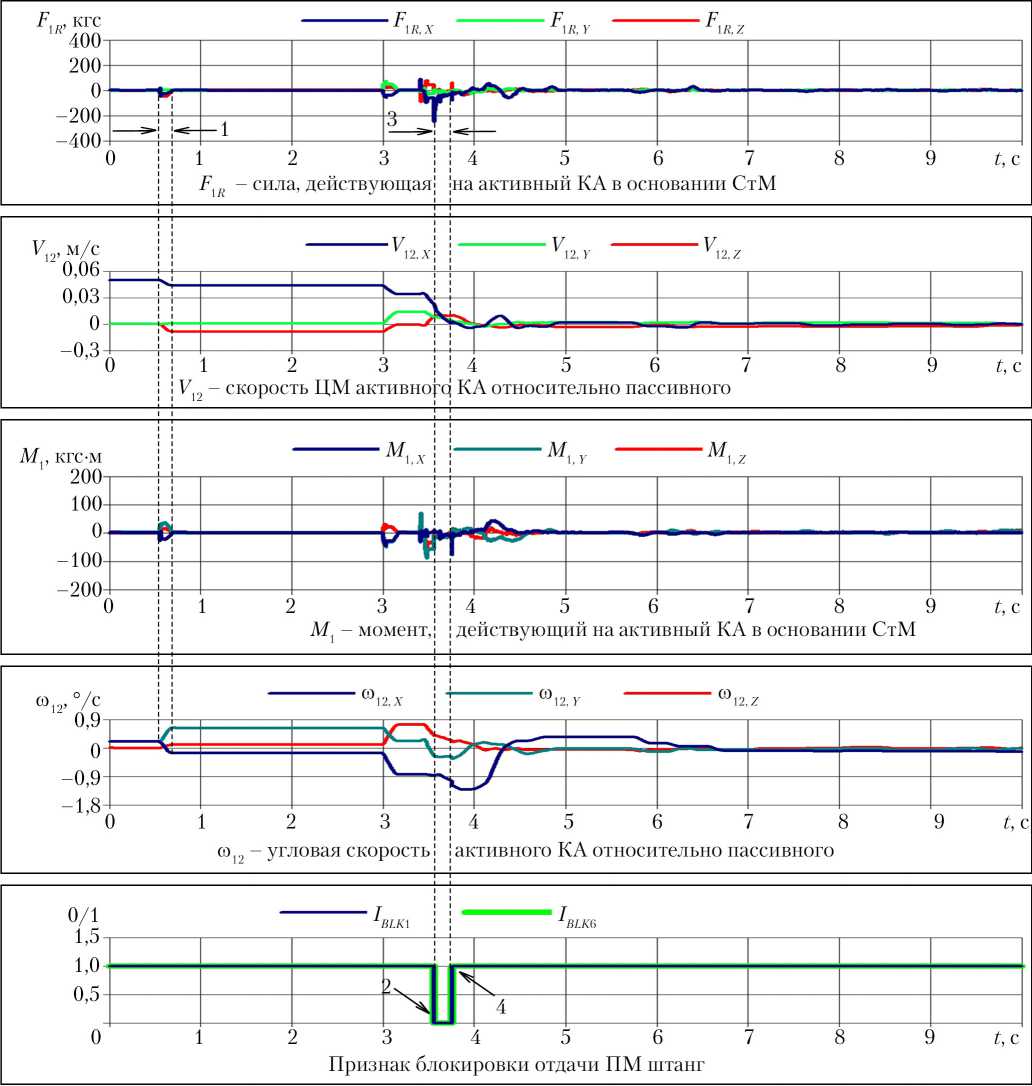
Рис. 4. Сцепка и поглощение энергии сближения КА в варианте 6 начальных условий (масса активного КА равна 5 т): 1 — первый контакт СтА; 2 — снятие блокировки отдачи ПМ при потере признака ИП; 3 — выдвижение кольца СтМ вперед из ИП; 4 — включение блокировки отдачи ПМ после сцепки
-
• при стягивании, которое начинается через 10 с после сцепки, совместное вращение кулачков силовых редукторов и кулачков барабанов начинается с троса, имеющего самую длинную свободную часть (между сходом с барабана и стыковочным кольцом). При выравнивании СтМ совместное вращение этих кулачков может прерываться вследствие нарастания относительной угловой скорости стягиваемых КА и появления слабины отдельных тросов, которая выбирается пружинами соответствующих барабанов, разводящих кулачки.
На это указывают значения признаков совместного вращения кулачков силовых редукторов и барабанов на рис. 6;
-
• сила, создаваемая одним приводом при выравнивании и стягивании СтА и КА, достаточна для преодоления сопротивления толкателей, электро- и гидроразъемов.
При угловых рассогласованиях СтА относительно продольной или поперечных осей на момент первого контакта расстояние между центрами стыковочных колец значительно меньше, чем при максимальном боковом промахе, и хода штоков штанг достаточно для их совмещения.
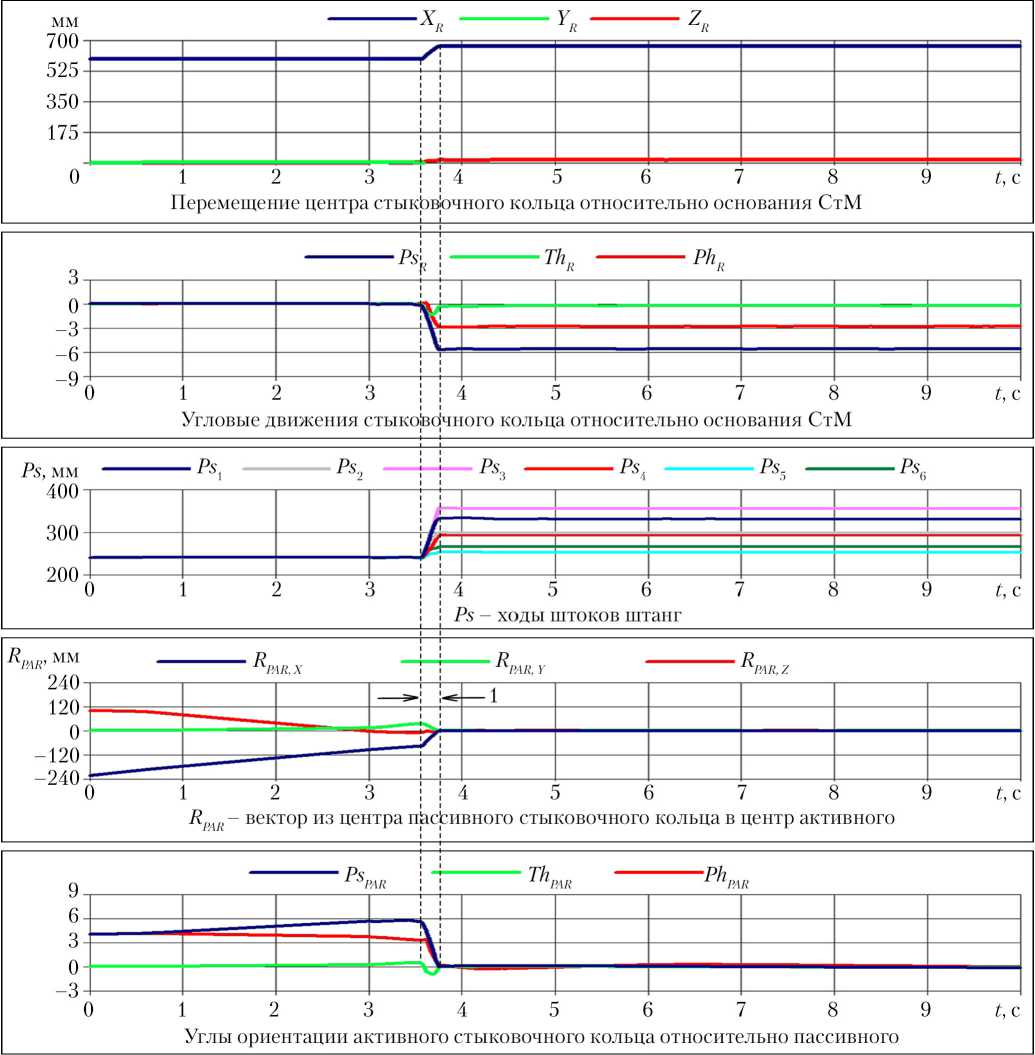
Рис. 5. Выдвижение стыковочного кольца вперед из ИП для достижения сцепки в варианте 6 начальных условий (масса активного КА равна 5 т): 1 — выдвижение СтМ вперед из ИП при снятии блокировки отдачи ПМ штанг
Поэтому из-за быстрого выдвижения кольца вперед из ИП относительно малые скорости вращения КА не влияют на процесс сцепки.
Максимальный боковой промах является единственным критичным параметром по критерию сцепки и только при минимальной скорости сближения, так как при большом расстоянии между стыковочными кольцами в момент первого контакта добавление кинетической энергии из-за максимальных значений других параметров НУ увеличивает вероятность преждевременного выдвижения СтМ из ИП. Но даже при одновременно всех максимальных отклонениях и скоростях тех же знаков (маловероятное сочетание) сцепка достигается увеличением скорости сближения и/или использованием РСУ активного КА (варианты 7, 7а и 8 таблицы). Кроме того, возможно изменение ИП и соответственного хода штоков штанг в зависимости от массы активного КА для улучшения сцепки.
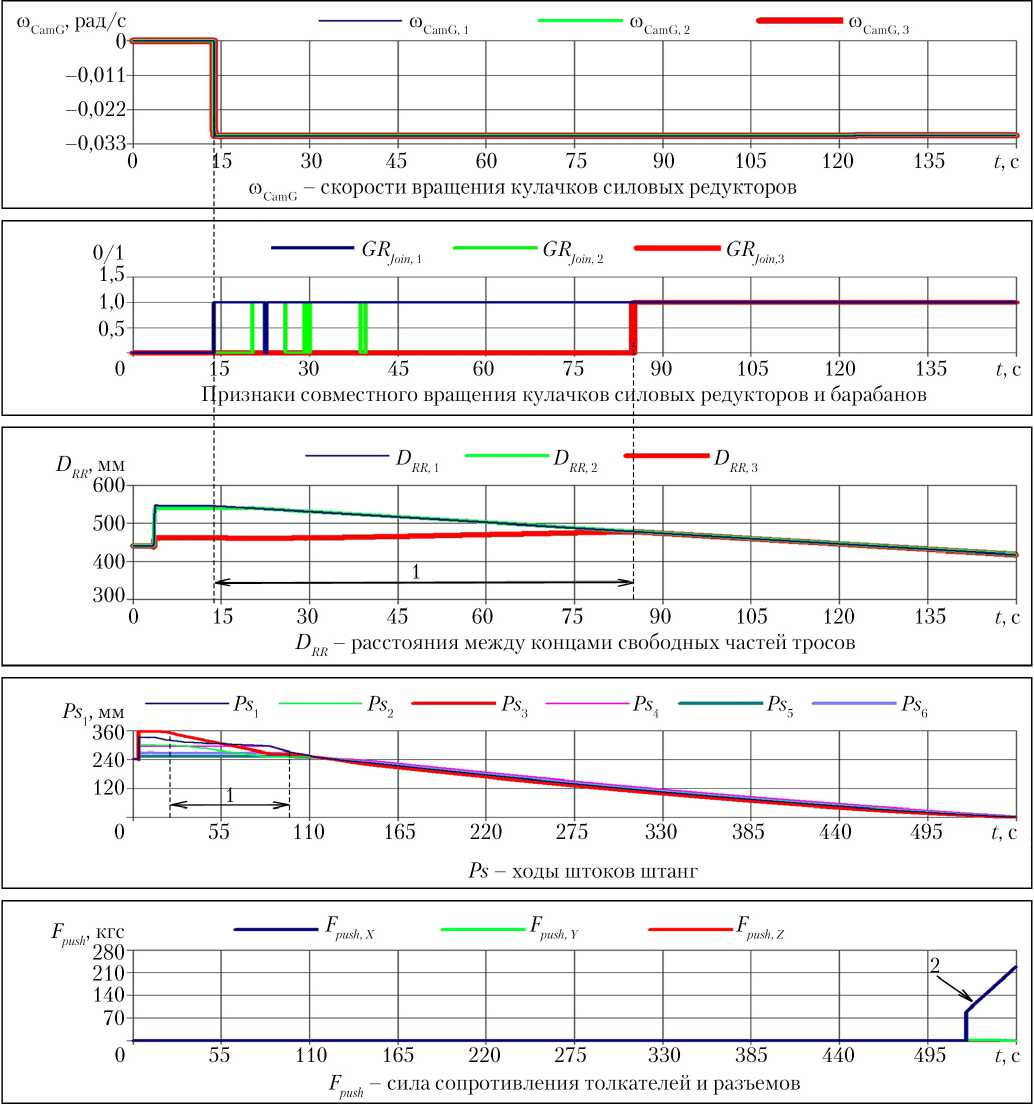
Рис. 6. Выравнивание СтМ при стягивании СтА и КА в варианте 6 начальных условий (масса активного КА равна 5 т): 1 — выравнивание СтМ при стягивании; 2 — преодоление сил сопротивления толкателей и разъемов
Заключение
Периферийный СтМ с накоплением энергии обеспечивает сцепку и допустимую величину контактных сил при экстремальных значениях параметров НУ и инерционных характеристиках КА, предусмотренных международным стандартом систем стыковки. Его единственный электропривод выравнивает и стягивает СтА (и КА) с обжатием толкателей, электро- и гидроразъемов. Использование этого периферийного СтМ предполагается в перспективных пилотируемых космических программах.
Список литературы Особенности динамики стыковки космических аппаратов при использовании периферийного механизма с накоплением кинетической энергии сближения
- International Docking System Standard (IDSS) Interface Definition Document (IDD). Режим доступа: http://internationaldockingstandard. com (дата обращения 15.01.2019 г.).
- Pajmans B, De Vriend K., Dittmer H., Urmston P., Gracia O. The International Berthing Docking Mechanism.. a new European docking system // Proc. of the 63rd International Astronautical Congress IAC-2012. October 1-5, Naples, Italy, IAC-12,B3,7,9,x15451. Режим доступа: https://iafastro.directory/iac/ archive/browse/IAC-12/B3/7/15451/ (дата обращения 15.01.2019 г.).
- Dittmer H., Gracia O., Caporicci M., Paijmans B., Meuws D. The International berthing Docking Mechanism (IBDM): Demonstrating full compliance to the International Docking System Standard (IDSS) // Proc. of the 66th International Astronautical Congress I AC 2015. October 12-16, Jerusalem, Israel, Paper ID: 30720. IAC-15,B3,7,7,x30720. Режим доступа: https://iafastro.directory/iac/archive/browse/ IAC-15/B3/7/30720/ (дата обращения 15.01.2019 г.).
- Gough V.E., Whitehall S.G. Universal tyre test machine // Proceedings of the FISITA Ninth International Technical Congress, May 1962. P. 117-137.
- Stewart D. A platform with six degrees of freedom // Proceedings of the Institution of Mechanical Engineers. 1965. V. 180. Part 1. № 15. P. 371-386.
- McFatter J., Keizer K., Rupp T. NASA Docking System Block 1: NASA's new direct electric docking system supporting ISS and future human space exploration // Proc. of the 44th Aerospace mechanism symposium, NASA Glenn Research Center, May 16-18, 2018. P. 471-484. Режим доступа: https://ntrs.nasa.gov/archive/nasa/casi.ntrs. nasa.gov/20150014481.pdf (дата обращения 15.01.2019 г.).
- Motaghedi P., Ghofranian S. Feasibility of the SIM AC for the NASA Docking System // AIAA Space and Astronautics forum and exposition (SPACE 2014), 14 July, 2014. P. 1-8. Режим доступа: https:// ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa. gov/20140009916.pdf (дата обращения 19.09.2018 г.).
- Ghofranian S., Chuang L-P., Motaghedi P. The Boeing Company, Spacecraft Docking System. Patent US20150266595 A1, September 24, 2015. Режим доступа: http://www.google.com/patents/US20150266595 (дата обращения 15.01.2019 г.).
- Hunt K.H. Structural kinematics in parallel-actuated robot-arms // Transactions of the ASME. Journal of Mechanisms, Transmissions and Automation in Design. December 1983. V. 105. P. 705- 712.
- Mission docking. Behind the scenes // Go taikonauts. January 2012. Issue 3. P. 6-20. Режим доступа: www.go-taikonauts.com (дата обращения 01.10.2019 г.).
- Liu Zhi, Zhang Chongfeng, Jin ZongGxiang, Shi Junwei, Xie Zhe, Hu Xufping Spacecraft docking system and method // Patent WO2018014676 (A1) - 2018-01-25.
- Яскевич А.В., Чернышев И.Е. Выбор параметров накопителя энергии для нового периферийного стыковочного механизма // Космическая техника и технологии. 2019. № 2(25). С. 55-66. 10.33950/ spacetech-2308-7625-2019-2-55-66.
- DOI: 10.33950/spacetech-2308-7625-2019-2-55-66
- Рассказов Я.В. Устройство накопления энергии нового периферийного стыковочного механизма // Космическая техника и технологии. 2019. № 3(26). С. 39-47.
- DOI: 10.33950/spacetech-2308-7625-2019-3-39-47
- Яскевич А.В. Математическая модель динамики нового периферийного стыковочного механизма // Космическая техника и технологии. 2019. № 3(26). С. 98-108.
- DOI: 10.33950/spacetech-2308-7625-2019-3-98-108
- Яскевич А.В. Контактные силы в уравнениях движения космических аппаратов при стыковке и причаливании // Космическая техника и технологии. 2018. № 2(21). С. 80-92.
- Яскевич А.В. Алгоритмы определения параметров контактов при моделировании стыковки и причаливания космических аппаратов // Космическая техника и технологии. 2018. № 3(22). С. 90-102.
