Особенности наведения бортовых лазерных приборов космической радионавигационной системы ГЛОНАСС

Автор: Карпам Игорь Николаевич, Жукова Екатерина Сергеевна, Литошик Сергей Владимирович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 (29), 2010 года.
Бесплатный доступ
Рассматриваются особенности использования бортовых лазерных систем для периодической юстировки радиотехнических каналов измерения дальности контрольных станций спутниковой радионавигационной системы ГЛОНА СС
Бортовая лазерная система, бортовой комплекс управления, наземный комплекс управления, радиочастотный канал, квантово-оптическая станция
Короткий адрес: https://sciup.org/148176249
IDR: 148176249 | УДК: 629.78
Characteristic features of targeting via aurborne laser space radio navigation devices of GLONASS system
Characteristic features of usage of airborne laser systems for periodic adjustment of radio channels for range measurements of control stations of GLONASS satellite radio navigation system are considered in the article
Текст обзорной статьи Особенности наведения бортовых лазерных приборов космической радионавигационной системы ГЛОНАСС
Квантово-оптические станции (КОС) предназначены для периодической юстировки радиотехнических каналов измерения дальности контрольных станций (КС) с помощью лазерного дальномера. В этих целях на каждом спутнике размещены специальные лазерные отражатели. Применение КОС обеспечивает высокоточное измерение параметров движения спутников ГЛОНАСС. В РФ разработаны три лазерные станции слежения, или КОС: лазерная дальномерная система «Гео-ИК»; КОС «Эталон»; КОС «Майданак».
Всего в России было сооружено 20 таких комплексов. Станция «Гео-ИК» является частью спутниковой геодезической системы «Гео-ИК», которая используется для определения земных координатных систем и моделей гравитационного поля Земли. Эти модели являются основой для высокоточных определений орбит спутников ГЛОНАСС.
Квантово-оптические станции типа «Эталон» и «Май-данак» используются для корректировки радиолокационных измерений и в процессе определения орбит в ГЛОНАСС. Второе поколение КОС «Эталон» позволяет определять положение спутников, видимых по отраженному вниз солнечному свету (со звездной величиной менее чем 13), на максимальной высоте 20 000 км. Погрешность измерений дальности при интервале усреднения в 15 с составляет около 1,5…2 см, а углового положения – 2…3".
Квантово-оптическая станция «Майданак» представляет собой многофункциональный комплекс, который позволяет измерять дальность до космических объектов на высотах до 40 000 км (со звездной величиной 16). Максимальная угловая ошибка определения положения спутника имеет порядок от 0,5 до 1…2", а дальномерная ошибка – не более 1,5…1,8 см. Наиболее эффективно лазерные станции работают в ночное время, при хорошей видимости [1–3].
Взаимная синхронизация бортовой шкалы времени (БШВ) космических аппаратов системы ГЛОНАСС по межспутниковым измерениям при автономном функционировании космических аппаратов (без связи с Землей) для потребителя не решает задачу привязки системной шкалы времени к шкале всемирного координированного времени UTC (SU).
Орбитальная групповая шкала времени имеет случайные уходы относительно UTC (SU), которые невозможно определить без взаимодействия с наземными стандартами частоты.
Величина этих уходов изменяется, и для передачи потребителям информации с требуемой точностью необходимо периодически контролировать этот параметр наземными измерительными средствами.
Данная задача может решаться с использование наземной лазерной системы, шкала времени которой синхронизирована со шкалой времени наземного стандарта частоты системы ГЛОНАСС [4].
Выполнение перспективных требований по точностным характеристикам (ТХ) эфемеридно-временной информации (ЭВИ) для космических аппаратов (КА) космических навигационных систем (КНС) на длительных интервалах автономного функционирования связано со значительным уменьшением погрешностей радиотехнических измерительных средств при определении дальностей между КА в орбитальной группировке, а также между КА и наземными измерительными средствами. Однако радиотехнические измерительные средства не могут полностью обеспечить решение задачи по достижению перспективных ТХ ЭВИ.
Кроме этого существуют определенные проблемы, продиктованные трудностями дальнейшего повышения точностных характеристик бортовых стандартов частоты.
Необходимо значительное изменение технологии решения эфемеридно-временной задачи (ЭВЗ), по сравнению с реализованными в настоящее время в КНС ГЛОНАСС и GPS, путем использования для решения указанной целевой задачи лазерных каналов для проведения измерений навигационных параметров и передачи информации между КА, а также между КА и наземными лазерными средствами.
Решение ЭВЗ в системе ГЛОНАСС для обеспечения высокой точности эфемеридно-временной информации, передаваемой потребителям в навигационном кадре, и необходимость метрологического обеспечения ЭВИ КА, радиотехнических бортовых и наземных измерительных средств возможно по технологии, основанной на использовании измерений дальности между КА, а между КА и наземными средствами – с помощью аппаратуры лазерных систем (ЛАС).
ЛАС могут играть и самостоятельную роль в обеспечении требуемых точностных характеристик эфемерид- но-временного обеспечения (ЭВО) потребителей. В частности, использование наземных лазерных средств (НЛС) для высокоточных лазерных измерений дальности в любое время суток позволит существенно увеличить количество проводимых измерений и, следовательно, организовав для ЭВО устойчивый технологический цикл, обеспечить достижение высоких точностных характеристик ЭВО КА ГЛОНАСС и, соответственно, точности навигационных определений потребителей, что имеет принципиальное значение для обеспечения конкурентоспособности системы ГЛОНАСС в сравнении с GPS.
В этой связи задача по использованию лазерных линий для регулярного оперативного уточнения частотновременной поправки (ЧВП) БШВ и взаимной синхронизации БШВ, с приведением частотно-временных поправок к БШВ КА к орбитальной групповой шкале времени системы ГЛОНАСС является весьма актуальной.
Применение ЛАС для межспутниковых дальномерных измерений с погрешностью не более 10 см позволит определять относительные сдвиги бортовых шкал времени КА с погрешностью не более 1 нс.
Основными функциями бортовых лазерных систем (БЛС) являются:
– измерения межспутниковых расстояний с сантиметровой точностью;
– передача измерительной и любой другой информации между КА;
– синхронизация бортовых шкал времени (БШВ) КА системы с наносекундной точностью;
– калибровка бортовой радиотехнической аппаратуры КА.
Физические принципы проведения измерений, осуществляемые БЛС и НЛС, обеспечивают потенциально высокие точностные характеристики измерения дальности между КА и определения расхождения их бортовых шкал времени.
Проведение сеансов измерений между БЛС и наземной лазерной системой (НЛС), использование результатов лазерных измерений дальности и обмен информацией для решения эфемеридно-временных задач позволят повысить точностные характеристики эфемерид КА и частотно-временных поправок к БШВ КА относительно системной шкалы времени КНС (СШВ).
Измерения дальности между БЛС КА могут обеспечить с наносекундной точностью определение расхождений между истинными значениями БШВ КА и прогнозируемыми значениями.
Межспутниковые измерения позволяют также преодолеть сокращение зоны наблюдаемости КА при региональном расположении наземных измерительных пунктов, обеспечить обмен между КА любой информацией и увеличить длительность интервала автономного функционирования КНС при сохранении требуемых точностных характеристик навигационного поля системы.
На борту КА устанавливаются два комплекта бортовой лазерной системы (БЛС), опорно-поворотные устройства (ОПУ) которых обеспечивают полный обзор нижней полусферы:
– углы поворота ОПУ относительно оси OYопу опорного поворотного устройства на начало и окончание каж- дого сеанса взаимодействия БЛС КА-снайпера для наведения линии визирования на БЛС КА-мишени (назначаются в диапазоне от минус 90о до плюс 90о);
– углы поворота ОПУ относительно оси OZ опу опорного поворотного устройства на начало и окончание каждого сеанса взаимодействия БЛС КА-снайпера для наведения линии визирования на БЛС КА-мишени (назначаются в диапазоне от 0о до плюс 9о).
За счет наличия на борту КА двух комплектов БЛС, расположенных по оси Z с двух противоположных сторон КА, обеспечивается возможность взаимодействия БЛС КА одновременно с БЛС на двух КА.
Технические требования, предъявляемые к БЛС КА:
-
– среднее число лазерных импульсов, передаваемых в измерительно-связном сеансе – 200;
-
– скорость нацеливания линии визирования по каждой координате – 10 град/с;
-
– точность наведения линии визирования зависит от точности определения целеуказаний для БЛС КА-снай-пера при нацеливании линии визирования на БЛС КА-мишени, погрешности приводов ОПУ и погрешности ориентации ОПУ БЛС относительно опорной системы координат. Определение угла поворота ОПУ относительно оси OY опу и угла поворота ОПУ относительно оси OZ опу опорного поворотного устройства на начало и окончание каждого сеанса взаимодействия для высокоточного наведения линии визирования используется эфемеридная информация, имеющаяся на борту КА;
-
– отработка угловых рассогласований приводами ОПУ БЛС должна быть не хуже 1 угл. мин;
-
– ширина диаграммы направленности лазерного передатчика не менее θ пер = 10 угл. мин;
-
– ширина диаграммы направленности лазерного приемника θ пр = 1,5 град;
-
– минимальный угол между линией визирования и вектором направления на Солнце – 30 град.;
-
– минимальный угол между линией визирования и вектором направления на центр Луны – 20 град.;
-
– минимальный угол между линией визирования и вектором направления на центр Земли – 20 град.;
-
– минимальный угол между линией визирования и вектором направления на любой элемент конструкции КА – 20 град.
Эфемериды КА известны с точностью, позволяющей определить направление линии визирования на КА-снай-пере на КА-мишень с угловой погрешностью не хуже десяти угловых секунд.
Таким образом, точность наведения оптических блоков, кроме погрешностей отработки угловых рассогласований, погрешностей выставки оптических осей БЛС относительно ее приборной системы координат (ПСК) и ее юстировки относительно связанной системы координат (ССК) КА, существенно зависит и от погрешностей ориентации КА, включающих погрешности командных приборов системы ориентации и динамику процессов ориентации.
Использование для взаимного наведения БЛС системы координат КА в качестве опорной системы не позволит выполнить требования по точности наведения лазерного передатчика и лазерного приемника при проведении сеансов.
Повышение точности ориентации платформы ОПУ БЛС возможно при создании для БЛС опорной системы координат с помощью модуля астроориентиров (МАО), которые входят в состав БЛС. В качестве опорной системы координат назначается текущая инерциальная экваториальная геоцентрическая система координат.
Инерциальная экваториальная геоцентрическая система координат 2000 г. (ИЭГСК 2000) определяется следующим образом:
-
– центр СК находится в центре масс Земли;
-
– ось OX г направлена в точку весеннего равноденствия, зафиксированную на 00:00:00 1 января 2000 г.;
-
– ось OZ г перпендикулярна плоскости экватора, зафиксированной на 00:00:00 1 января 2000 г., и направлена в сторону Северного полюса Земли;
-
– ось OY г дополняет систему координат до правой;
-
– S – звездное время на момент времени t 0.
S = S 0 + 0,729 211 585■Ю-4 1 0 , где e0 - средний наклон эклиптики к экватору; C РАД = 0,484 813 68 ■ 10 5 - константа перевода из угловых секунд в радианы.
Рассчитываются вспомогательные параметры:
-
с 1 = (450 160 " ,280 - 696 289 0",539 ■ T + 7",455 ■ T 2 ) ■ C РАД ,
-
с , = ( - 286 322",15 + 129 602 771,27 ■ T + Г,089 ■ T 2 ) ■ C ,
-
2 РАД
с 3 = (128 709 9”,804 + 129 596 581",224 ■ T- 0",577 ■ T 2 ) ■ C РАД , Av = ( - 0,833 860 113 705 - 10 - 4sin с 1 + 0,999 685 8 70 6 sin2 с 1 -- 0,639 323 8 ■ 10 - 5 sin2 с 2 + 0,691 344 308 70 6 sin с 3 )cos s0 .
Истинное гринвичское звездное время S 0 в 0 h гринвичского времени определяется по формуле
S 0 = 1,753 368 559 233 +
+ 0,017 202 791 805 25 d +
+ 0,677 ■Ю - 5 T 2 + Av cos e 0.
Звездное время S приводится к диапазону [0 - 2 п ].
Рассчитывается координаты и вектор скорости НКА ГЛОНАСС в инерциальной текущей экваториальной геоцентрической системе координат по следующим формулам:
X г = X гр ■ cos S - У Г р ■ sin S ;
У г = X гр ■ sin S - У гр ■ cos S ;
z = z ■ ггр ;
Vx г = Vx гр ■ cos S - Vy гр ■ cos S ;
Vx г = Vx гр ■ sin S + Vy гр ■ cos S ;
Vz г = Vz гр .
Инерциальная текущая экваториальная геоцентрическая система координат ( ИЭГСК ) определяется следующим образом:
-
– центр СК находится в центре масс Земли;
-
– ось OX г t направлена в текущую точку весеннего равноденствия;
-
– ось OZ г t перпендикулярна текущей плоскости экватора и направлена в сторону Северного полюса Земли;
-
– ось OY г t дополняет систему координат до правой.
Модуль астроориентиров предназначен для следующего:
-
– определения трехосной ориентации приборной системы координат БЛС в инерциальной геоцентрической системе координат;
-
– выдачи вычислительному устройству (ВУ) информации о трехосной ориентации приборной системы координат БЛС относительно инерциальной геоцентрической экваториальной системы координат (ИГЭСК) – матрицы перехода от ИГЭСК к приборной системе координат БЛС;
-
– уточнения программного наведения и сопровождения ОПУ БЛС при выполнении сеансов взаимодействия.
Проведение сеансов измерений между БЛС и наземной лазерной системой будут практически отрабатываться на малом космическом аппарате «Юбилейный-2», на котором будет установлена аппаратура «Блик» (рис. 1). Прием и хранение телеметрии космического аппарата «Юбилейный-2» организовывается в Студенческом центре управления полетами Сибирского государственного аэрокосмического университета имени академика М. Ф. Решетнева [5; 6].
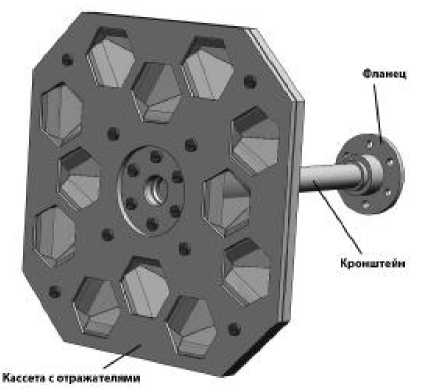
Рис. 1. Схема конструкции аппаратуры «Блик»
Температурные режимы определяют материал, из которого изготовлены отражающие призмы – плавленый кварц марки КУ-1 (кварц ультрафиолетовый), с улучшенной пропускающей способностью в ультрафиолетовой части спектра (рис. 2).
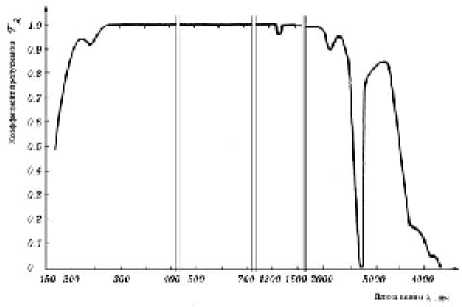
Рис. 2. Спектральная кривая коэффициента пропускания оптического кварцевого стекла марки КУ-1
Стекло марки КУ-1 – стекло кварцевое оптическое, прозрачное в ультрафиолетовой и видимой областях спектра, с интенсивной полосой поглощения в интервале длин волн 170…250 нм, с заметной полосой поглощения в интервале 2 600...2 800 нм.
Масса устройства в сборе не более 700 г. Кассета для крепления отражателей изготовлена из алюминиевого сплава марки АМГ-6. Габаритные размеры деталей даны на рис. 3.
В настоящей статье не рассматриваются особенности модуля астроориентиров, принцип его функционирования, интерфейс с ОПУ и основные характеристики, а предлагается ограничиться только результатом его взаимодействия с ОПУ БЛС – создание для любого момента времени на каждом КА орбитальной группировки ГЛОНАСС инерциальной экваториальной геоцентрической системы координат и ее поддержание в течение штатного функционирования системы, что обеспечивает при выполнении сеансов измерений и обмена информацией по лазерной линии высокоточное взаимное наведение оптических осей лазерного передатчика КА-снайпера на фотоприемник лазерного излучения КА-мишени.
