Особенности обеспечения качественной работы современных электротехнических комплексов беспилотных судов

Автор: Савенко А. Е., Савенко П. С.
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Электротехника. Транспорт
Статья в выпуске: 4 т.25, 2022 года.
Бесплатный доступ
Беспилотные морские суда находят все более широкое применение. В статье в качестве примера беспилотного судна рассматривается грунтоотвозная шаланда "Рабочая". Для выполнения производственных задач в беспилотном режиме на шаланде дополнительно установлены расширенная судовая система управления техническими средствами, обзорно-поисковая система и подсистема видеонаблюдения. Корректная работа этих систем и всего судна зависит от качественной работы судового электротехнического комплекса. Целью исследования является выявление нештатных режимов параллельной работы судовых дизель-генераторных агрегатов и разработка методов и средств для их устранения. Результаты проведенного экспериментального исследования и математического моделирования выявили существование обменных колебаний мощности при параллельной работе судовых генераторов. Обменные колебания мощности могут быть определены по колебаниям токов генераторов. Для устранения таких колебаний предложено ввести в состав системы автоматического управления судовыми электротехническими комплексами блок устранения обменных колебаний мощности (УОКМ). Разработан алгоритм работы блока УОКМ, который управляет настройками регуляторов частоты вращения дизель-генераторных агрегатов. Предложенные методы и средства уменьшают амплитуду обменных колебаний мощности до допустимого значения, т. е. способствуют качественной работе судового электротехнического комплекса и систем управления в беспилотном режиме. Полученные результаты позволяют обеспечить надежную и безаварийную работу любого автономного электротехнического комплекса в режиме эксплуатации без обслуживающего персонала.
Беспилотные суда, генераторный агрегат, судовой электротехнический комплекс, параллельная работа, обменные колебания мощности
Короткий адрес: https://sciup.org/142235525
IDR: 142235525 | УДК: 621.313 | DOI: 10.21443/1560-9278-2022-25-4-378-389
Текст статьи Особенности обеспечения качественной работы современных электротехнических комплексов беспилотных судов
e-mail: , ORCID:
Савенко А. Е. и др. Особенности обеспечения качественной работы современных электротехнических комплексов беспилотных судов. Вестник МГТУ. 2022. Т. 25, № 4. С. 378–389. DOI:
e-mail: , ORCID:
Электротехнические комплексы современных морских судов имеют в своем составе дизель-генераторные агрегаты и различные электрические приводы, обеспечивающие движение и эксплуатацию самого плавучего объекта, а также выполнение им различных технологических операций в зависимости от назначения судна ( Хватов и др., 2014; Калмыков и др., 2013; Dar'enkov et al., 2017 ). Как правило, основным режимом работы генераторных агрегатов является их параллельная работа. Обслуживающий персонал судна использует большое количество систем автоматического управления для обеспечения качественной работы судовой электростанции ( Сеньков и др., 2017; Губанов и др., 2019; Geertsma et al., 2018 ). Однако, несмотря на наличие современных систем автоматики и высококвалифицированных экипажей, в работе автономных электротехнических комплексов морских судов существуют отклонения параметров от штатных значений, которые негативно сказываются на работе судового электрооборудования ( Dovgun et al., 2020 ). В ряде случаев возникают нештатные ситуации, которые приводят к обесточиванию всего судна, что является аварийной ситуацией и создает угрозу судну, судоходству и жизни людей ( Zhu et al., 2020 ). Особую значимость обеспечение качественной работы электротехнического комплекса имеет для беспилотных судов, которые получают широкое распространение в последние годы.
Для беспилотных судов сохраняются все задачи и проблемы, возникающие при эксплуатации автономных электротехнических комплексов морских судов ( Mondejar et al., 2018 ). Отсутствие на борту судна экипажа и возможность воздействия на все органы управления элементов судна только дистанционно посредством систем автоматики существенно усложняет решение поставленных задач и повышает ответственность и требования к надежной и качественной работе судового электротехнического комплекса ( Мартынов и др., 2017; Воронин и др., 2015; Tyutikov et al., 2020 ). Первостепенное значение при эксплуатации беспилотных морских судов приобретает безаварийность судоходства и сохранность человеческих жизней. Результаты, решения и опыт, полученные при обеспечении работы электротехнических комплексов беспилотных морских судов, могут быть с успехом использованы в любых автономных электроэнергетических системах по всему миру. Автономные электротехнические комплексы повсеместно используются в различных отраслях мировой экономики ( Лежнюк и др., 2012; Micu et al., 2019; Martinez et al., 2017 ), но на морских судах такие комплексы имеют наиболее сложную структуру и условия эксплуатации, связанные с повышенной опасностью для экипажа. Поэтому усилия мирового научного сообщества нацелены на обеспечение качественной работы электротехнических комплексов морских судов в беспилотном варианте ( Liu et al., 2016 ). Одним из специфических видов деятельности морских судов во всем мире является постоянное поддержание глубин и рельефа морского дна в местах стоянки и на пути следования судов в надлежащем состоянии. При выполнении таких работ задействованы грунтоотвозные шаланды.
Цель исследования – выявление нештатных режимов параллельной работы судовых дизель-генераторных агрегатов и разработка методов и средств для их устранения.
Материалы и методы
В качестве примера судна, выполняющего производственные задачи без экипажа, можно назвать грунтоотвозную шаланду "Рабочая" (рис. 1), где установлено специальное управляющее оборудование.

Грунтоотвозная самоходная баржа "Рабочая" проекта НВ-600 построена в 2019 г. на Онежском судостроительно-судоремонтном заводе (Петрозаводск, Россия) и эксплуатируется в Азово-Черноморском бассейновом филиале ФГУП "Росморпорт". Высокотехнологичное оборудование, установленное на головном дноуглубительном судне "Соммерс", позволяет дистанционно управлять грунтоотвозной шаландой "Рабочая". Дистанционное или автоматическое управление шаландой осуществляется во время дноуглубительных работ и хода шаланды от района работ до места морского отвала порядка 30 км. Планируется, что управление с головного судна будет осуществляться всеми судами каравана, задействованными в дноуглубительных работах.
На палубе в корме шаланды "Рабочая" установлены два 4-тактных дизельных двигателя с непосредственным впрыском, турбонаддувом и охлаждением Volvo Penta марки D13-MH (R1-500). Мощность каждого составляет 368 кВт, они используются для привода винторулевых колонок. Для производства электрической энергии в машинном отделении "Рабочей" установлены два вспомогательных дизель-генератора марки МТ ВДГ-100ВСт мощностью по 100 кВт каждый.
Для обеспечения беспилотной эксплуатации на шаланде установлена расширенная судовая система управления техническими средствами (Р-СУТС). Она обеспечивает контроль состояния технических средств по данным автоматической системы контроля и технической диагностики, формирование аварийнопредупредительных сигналов по техническим средствам судна, оценивает работу сигнально-отличительных фонарей судна, передает информацию о состоянии технических средств на дистанционный пульт управления. Р-СУТС контролирует и отображает информацию от системы главных двигателей, электроэнергетической системы, системы котельной установки, системы охлаждения, системы винторулевых колонок, топливной системы, системы сжатого воздуха, системы управления подруливающего устройства, конденсатно-питательной системы, системы смазочного масла. Взаимодействие оператора и программы ведется через интерфейс посредством взаимодействия с элементами графического интерфейса Р-СУТС. Для работы Р-СУТС используются аппаратные средства: процессор Intel Core i9 9900K, куллер SNK-P0046P, материнская плата Supermicro MBD-X11SCZ, платформа CSE-512F-350B, оперативная память 2 по 8 Gb, коммутатор Cisco SG350-28 28-port, жесткий диск 240 GB, сенсорный экран Dell 23,8” P2418HT, удлинитель сигналов HDMI и USB, сетевая карта Intel 4 по 1 Gb, ОС Astra Linux 1.6, специальное программное обеспечение.
На шаланде "Рабочая" также установлена обзорно-поисковая система (ОПС), которая предназначена для решения следующих задач: наблюдение в видимом и инфракрасном диапазонах, стабилизация видеоизображений при помощи аппаратных и программных средств, распознавание типов навигационных опасностей – суда, катера, моторные лодки, лед, плавающие предметы (бревна, контейнеры и др.), распознавание сигнальных огней, определение дальности до обнаруженных объектов, компрессия видеоизображений с учетом текущей пропускной способности каналов связи судна с береговым пунктом управления для мониторинга и управления судном с берегового пункта, обеспечение углов обзора и дальности видимости, достаточных для мониторинга и безопасного управления судном с берегового пункта применительно к каждому типу судна, измерение и выдача углов положения визирной оси по дистанции, курсовому углу и углу места, обнаружение и автоматическое сопровождение объектов. Для работы ОПС установлены аппаратные средства: процессор Intel Core i9 9900K Soc-1151v2 OEM, куллер Titan TTC-NK96TZ/NPW, материнская плата ASUS TUF Z390M-PRO GAMING, платформа SuperChassis 745TQ-R920B, оперативная память 2 по 16 Gb, коммутатор Cisco SG350-28 28-port, жесткий диск SSD SATA2,5” 2 по 480 GB, видеокарта GeForce RTX2080TTI (2 штуки), сетевая карта Intel 4 по 1 Gb, ОС Windows 10 Professional, два сетевых накопителя Synology RS 819 (процессор Realtek RTD 1296, четыре жестких диска SATA 3 TB WD30EFRX), видеокамера с тепловизором TKPTZ-520T-30X-480, семь видеокамер TKNCL-8210-316-EP-230-AN-37, специальное программное обеспечение. В автоматическом режиме в светлое время суток анализируется видео, получаемое стационарными видеокамерами. При помощи автоматической программной обработки видеоизображений производится определение объектов, которые потенциально могут представлять навигационную опасность: суда, катера, моторные лодки, лед, плавающие предметы (бревна, контейнеры и др.). После обнаружения каких-либо объектов выполняется их автоматическое программное распознавание. При этом, если качество изображения, получаемого при помощи стационарных видеокамер, оказывается недостаточным для распознавания (объект занимает малое количество пикселов на изображении), на объект автоматически наводится поворотная камера для получения более качественного изображения. За распознанным объектом автоматически начинается слежение, а вся информация передается на навигационный мостик. Полученная об объектах информация от ОПС передается в систему автоматического управления движением судна. При снижении эффективности видеокамер (из-за слабого освещения или его отсутствия) происходит сканирование окружающего пространства при помощи тепловизора. В режиме дистанционного управления на пяти горизонтально расположенных мониторах берегового центра отображается навигационная обстановка вокруг судна и результаты распознавания. При этом сенсорная панель экрана вспомогательного монитора используется для поворота (наклона) видео, увеличения масштаба просмотра объекта, находящегося в центральной зоне центрального из трех мониторов, переключения между видеоканалом и инфракрасным каналом или совмещении по видеоканалу и инфракрасному каналу.
На судне установлена подсистема видеонаблюдения (ПВН), предназначенная для мониторинга текущего состояния дел в ходовой рубке, мониторинга работы судовых систем, мониторинга и контроля параметров грузов. Для работы ПВН установлены аппаратные средства: процессор Intel Core i9 9900K Soc-1151v2 OEM, куллер Titan TTC-NK96TZ/NPW, материнская плата ASUS TUF Z390M-PRO GAMING, платформа SuperChassis 745TQ-R920B, оперативная память 2 по 16 Gb, коммутатор Cisco SG350-28 28-port, жесткий диск SSD SATA2,5” 2 по 480 GB, видеокарта GeForce RTX2080TTI, ОС Windows 10 Professional, видеокамера TKSCE-3-IR-HD-AK-316, специальное программное обеспечение. В автоматическом режиме при отклонении объекта наблюдения от эталонных значений производится индикация на вспомогательном мониторе оператора. Также доступно интегральное отображение информации о наблюдаемых объектах.
Эксплуатация морских судов в беспилотном режиме находит все более широкое применение при решении различных технологических задач. Просматривается четкая тенденция на увеличение количества судов, способных работать без нахождения экипажа на борту. Для обеспечения качественной и безопасной работы в беспилотном режиме суда оснащаются системами, обеспечивающими дистанционное управление их электротехническими комплексами. В свою очередь работа систем дистанционного управления напрямую зависит от работы электротехнических комплексов судов. Обменные колебания мощности, возникающие при параллельной работе судовых генераторных агрегатов отрицательно влияют на работу всего электрооборудования ( Конкс и др., 2005 ). Поэтому системы дистанционного управления судов и их электротехническими комплексами не могут корректно выполнять свои функции при существовании обменных колебаний мощности. Кроме того, известно, что обменные колебания мощности приводят к выпадению генераторов из синхронизма и обесточиванию судов, т. е. системы дистанционного управления оказываются отключенными и судно остается без управления ( Савенко и др., 2016; Конкс и др., 2005 ). В случае возникновения такой аварийной ситуации потребуется срочное прибытие обслуживающего персонала для перезапуска электротехнического комплекса судна. Очевидно, что эксплуатация судов в беспилотном режиме без обеспечения надежной и беспрерывной работы электротехнического комплекса теряет смысл и оказывается нецелесообразной.
Результаты и обсуждение
При проведении экспериментальных исследований ( Савенко и др., 2016 ) получены осциллограммы токов двух параллельно работающих генераторных агрегатов (рис. 2), на которых зафиксированы обменные колебания токов, а значит, мощностей генераторов.
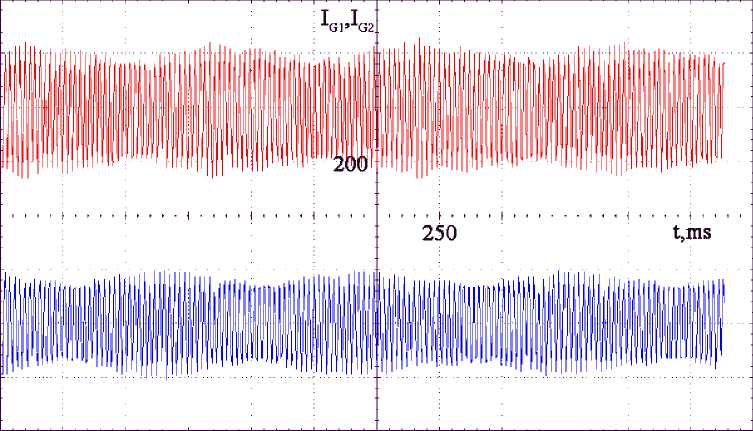
Рис. 2. Осциллограммы токов параллельно работающих генераторов в квазиустановившемся режиме работы судового электротехнического комплекса
Fig. 2. Oscillograms of currents of generators operating in parallel in the quasi-steady operation mode of the ship's electrical power complex
При использовании двухканального цифрового осциллографа получены осциллограммы фазного тока и активной мощности этой же фазы одного из параллельно работающих дизель-генераторов. Один из режимов представлен на рис. 3, 4. Эти осциллограммы доказывают возможность диагносцирования обменных колебаний мощности по соответствующим обменным колебаниям токов в связи с синфазностью изменения измеряемых величин.
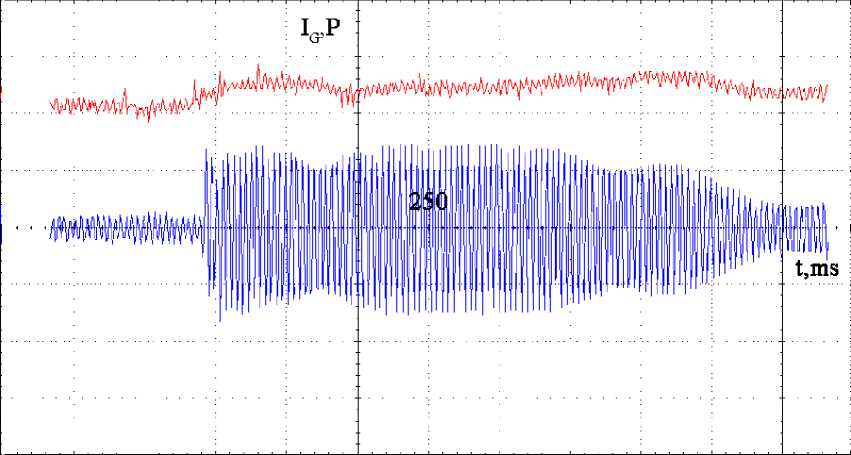
Рис. 3. Осциллограммы тока и активной мощности одного из параллельно работающих генераторов в первой фазе пуска электродвигателя подруливающего устройства
Fig. 3. Oscillograms of the current and active power of one of the parallel generators in the first phase of the start of the thruster electric motor
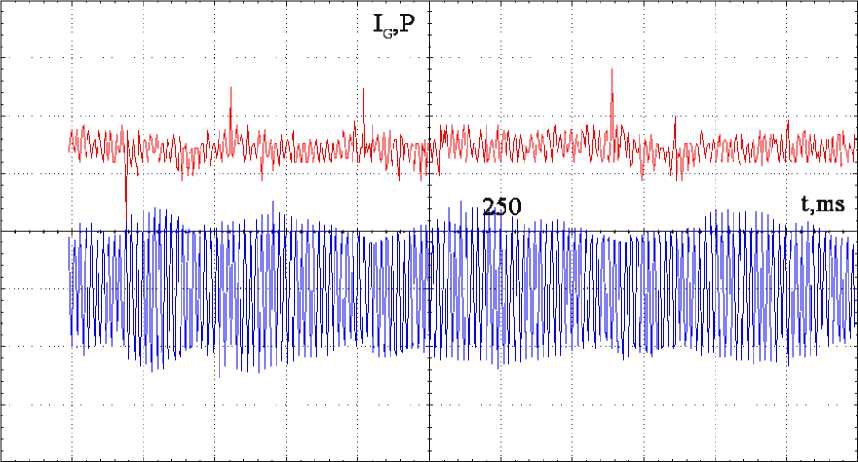
Рис. 4. Осциллограммы тока и активной мощности одного из параллельно работающих генераторов в квазиустановившемся режиме работы судового электротехнического комплекса
Fig. 4. Oscillograms of the current and active power of one of the parallel generators in the quasi-steady operating mode of the ship's electrical power complex
Математическое моделирование тока и мощности одного из двух параллельно работающих генераторов (рис. 5) и токов и мощностей двух параллельно работающих генераторов (рис. 6) также совпадает с полученными экспериментальными результатами и совместно обосновывают возможность такого выявления обменных колебаний мощности.
Таким образом, результаты математического моделирования показывают, что мощность генератора совпадает с его активной мощностью. Огибающая линия фазного тока iA 1 изменяется синфазно с мощностью P 1, огибающая линия фазного тока i A 2 изменяется синфазно с мощностью P 2 , а минимумы мощности P 1 соответствуют максимам мощности P 2 , и наоборот, что также подтверждает возможность идентификации обменных колебаний мощности по токам фаз параллельно работающих генераторов.
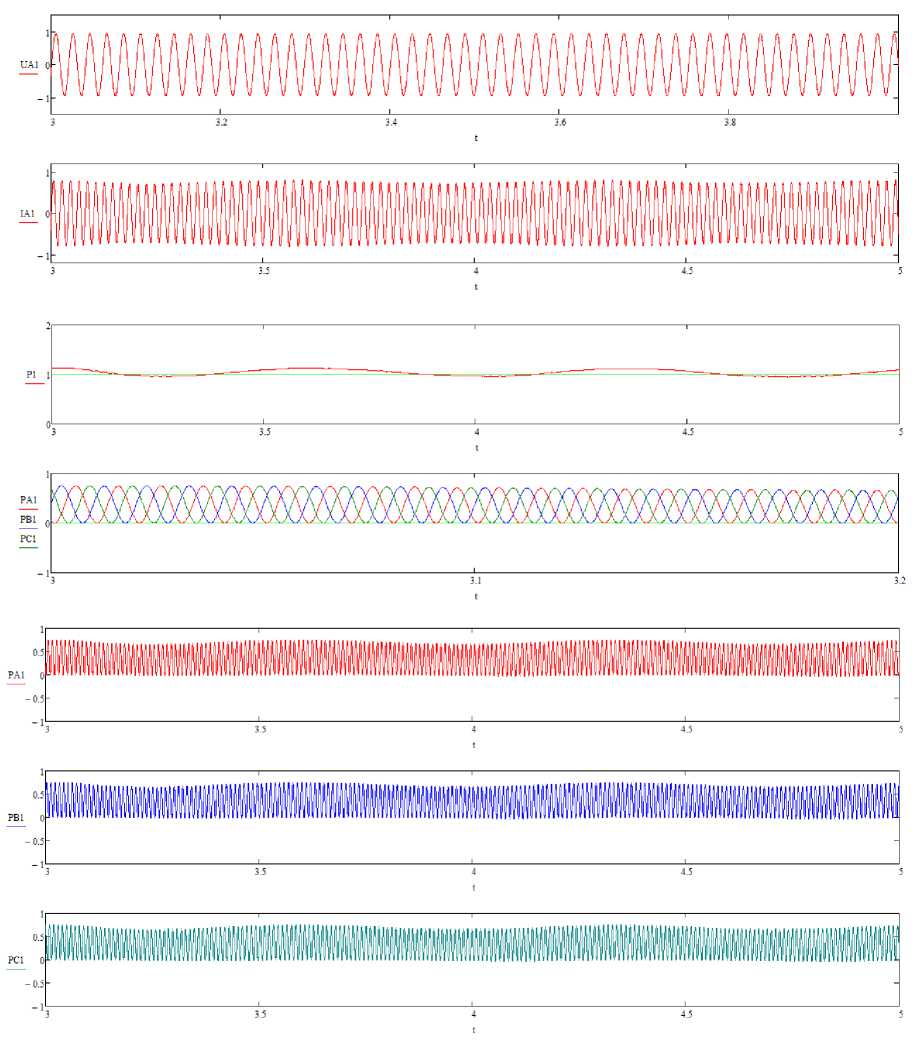
Рис. 5. Результаты математического моделирования напряжения, тока и активной мощности одного из параллельно работающих генераторов в квазиустановившемся режиме работы судового электротехнического комплекса
Fig. 5. The results of mathematical simulation of voltage, current and active power of one of the parallel generators in the quasi-steady operating mode of the ship's electrical power complex
Исследования показали, что возможно устранение обменных колебаний мощности или снижение их амплитуды до безопасных пределов ( Савенко и др., 2016; Savenko, 2019; Savenko et al., 2020 ). Для этого необходимо установить в систему управления судовым электротехническим комплексом блок устранения обменных колебаний мощности (УОКМ). Блок УОКМ является микропроцессорным устройством, которое воздействует на настройки регуляторов частоты вращения дизель-генераторных агрегатов.
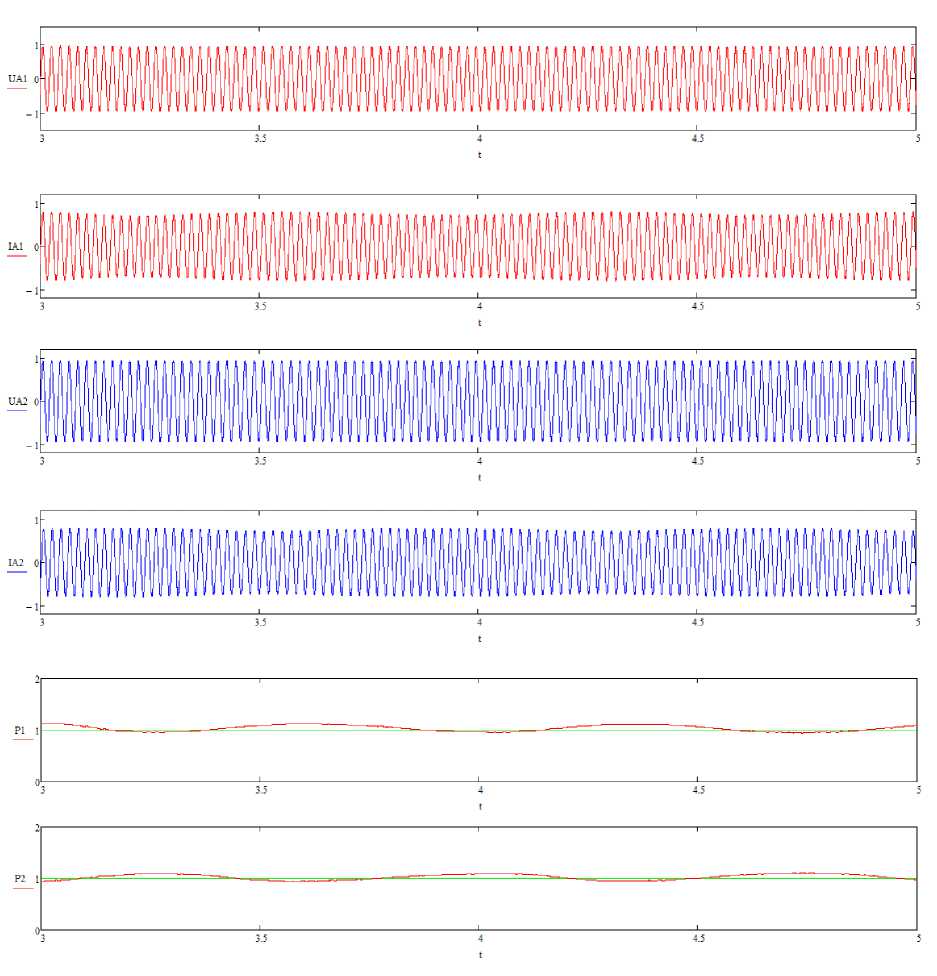
Рис. 6. Результаты математического моделирования напряжения, тока и активной мощности двух параллельно работающих генераторов в квазиустановившемся режиме работы судового электротехнического комплекса
Fig. 6. Results of mathematical simulation of voltage, current and active power of two generators operating in parallel in the quasi-steady operation mode of the ship's electrical power complex
На рис. 7 представлен алгоритм работы блока устранения обменных колебаний мощности УОКМ. После включения блока в работу происходит его инициализация, при которой принимаются начальные значения коэффициентов передачи Kω регуляторов скорости дизелей и уставок задания ωr 0 скоростей вращения дизелей. Эти начальные значения могут задаваться программно как исходные в номинальном режиме, либо приниматься как текущие, установленные в генераторных агрегатах. Далее необходимо подготовить данные для контроля наличия обменных колебаний мощности и их амплитуды. Такие значения необходимо определить для каждого параллельно работающего дизель-генератора. Основной информацией на этом этапе являются максимальные A max и минимальные A min значения амплитуд токов генераторов, моменты времени t max максимальных значений токов и период колебаний T . На следующем шаге система сравнивает полученный результат об амплитуде существующих колебаний мощности с максимально допустимым их значением, заданным в программе блока. Если определенное текущее значение амплитуды не превышает заданное, то блок продолжает контроль появления колебаний и отслеживает их амплитуду, никаких изменений настроек регуляторов частоты дизель-генераторов при этом не происходит.
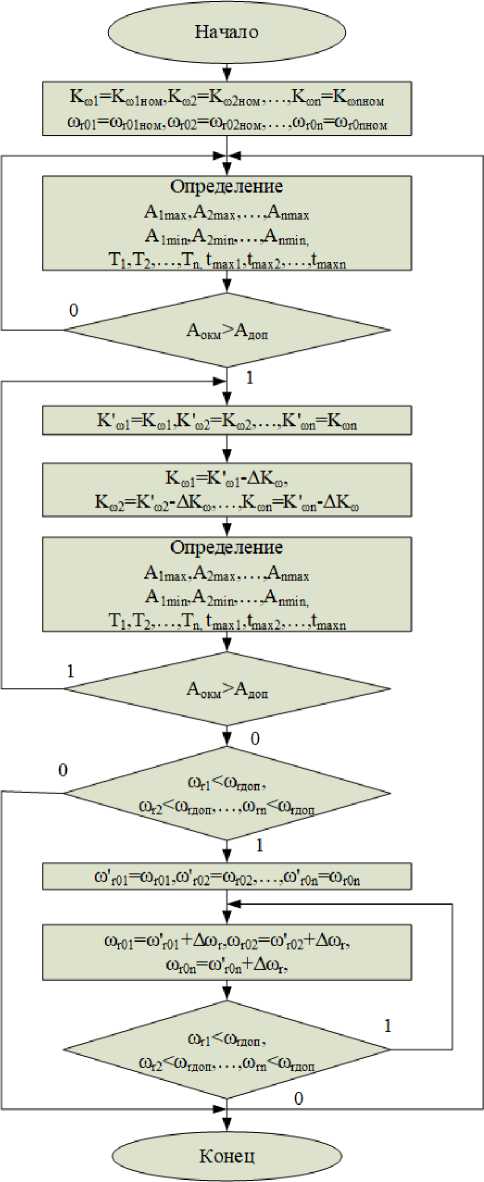
Рис. 7. Алгоритм работы блока устранения обменных колебаний мощности
Fig. 7. Algorithm of operation of the block for eliminating power exchange oscillations
В случае выявления превышения текущей амплитуды обменных колебаний мощности Aокм установленного предельного значения Aдоп, блок УОКМ инициирует постепенное плавное уменьшение коэффициента передачи регуляторов скорости дизелей. Шаг изменения коэффициента передачи ∆Kω выбирается одинаковым для всех дизель-генераторов. Процесс изменения коэффициента передачи регулятора частоты начинается с базового дизель-генератора, который является ведущим при параллельной работе в составе судовой электростанции. После изменений в настройках базового генератора с высоким быстродействием производится одновременное изменение значений настроек коэффициентов передачи всех ведомых дизель-генераторов, участвующих в параллельной работе в текущем режиме работы судового электротехнического комплекса. После осуществления каждого шага ∆Kω для уменьшения значений коэффициентов передачи всех работающих дизель-генераторных агрегатов снова определяются максимальные Amax и минимальные Amin значения амплитуд токов генераторов, моменты времени tmax максимальных значений токов и период колебаний T. Это необходимо для определения нового текущего значения амплитуды обменных колебаний мощности и его сравнения с допустимым значением Aдоп. Если текущее значение амплитуды колебаний все еще превышает допустимое значение, то делается следующий шаг для уменьшения коэффициентов передачи регуляторов частоты дизель-генераторов. В противном случае изменения прекращаются, и электростанция продолжает работать с новыми настройками дизель-генераторов. Очевидно, что уменьшение значений коэффициентов передачи вызывает увеличение мягкости характеристик генераторных агрегатов, что приводит к уменьшению частоты. По этой причине необходимо осуществлять постоянный контроль частоты вращения ωr роторов генераторов. Как только обнаружится, что частота ωr стала меньше допустимой частоты ωrдоп, блок УОКМ инициирует постепенное плавное увеличение значений уставки задания скоростей вращения дизель-генераторов. Шаг изменения уставки задания скоростей вращения ∆ωr выбирается одинаковым для всех дизель-генераторов. Процесс изменения уставки задания скоростей вращения регулятора частоты начинается с базового дизель-генератора, который является ведущим при параллельной работе в составе судовой электростанции.
После изменений в настройках базового генератора с высоким быстродействием производится одновременное изменение значений настроек уставки задания скоростей вращения всех ведомых дизель-генераторов, участвующих в параллельной работе в текущем режиме работы судового электротехнического комплекса. После осуществления каждого шага ∆ω r для увеличения значений уставки задания скоростей вращения всех работающих дизель-генераторных агрегатов контролируется текущее значение частоты для его сравнения с допустимым значением ω r доп. Если текущее значение частоты вращения все еще меньше допустимого значения, то делается следующий шаг для увеличения значений уставки задания скоростей вращения регуляторов частоты дизель-генераторов. В противном случае изменения прекращаются, и электростанция продолжает работать с новыми настройками дизель-генераторов. Частота вращения дизель-генераторов определяет частоту напряжения судовой электрической сети, поэтому необходимо поддерживать ее в заданном диапазоне для обеспечения качественной работы всего судового электротехнического комплекса. В алгоритме работы блока УОКМ сохраняются перед каждым изменением текущие значения коэффициентов передачи регуляторов скорости дизелей K' ω и уставок задания скорости вращения ω' r 0 .
Блок устранения обменных колебаний мощности может быть интегрирован в систему управления электротехническим комплексом беспилотного судна, при этом используя информацию с датчиков уже существующих систем. Блок УОКМ обеспечит устранение обменных колебаний мощности путем уменьшения амплитуды таких колебаний до значений, менее заданных в квазиустановившихся режимах работы электротехнического комплекса беспилотного судна. В случае изменения числа параллельно работающих генераторов, а также возникновения иных переходных процессов, блок УОКМ входит в режим прерывания на время переходных процессов, после чего начинает свою работу сначала.
Для проверки эффективности и работоспособности разработанного алгоритма функционирования блока устранения обменных колебаний мощности разработана компьютерная программа, на которую получено свидетельство о регистрации. Результаты работы такой программы при устранении обменных колебаний мощности, представленных на рис. 5 и 6, изображены на рис. 8. Здесь получены токи одной из фаз двух параллельно работающих дизель-генераторных агрегатов. Также на каждом из графиков токов отмечены огибающие этих токов, по которым видно полное отсутствие обменных колебаний мощности. Таким образом, получены результаты, подтверждающие эффективность работы судового электротехнического комплекса, снабженного блоком устранения обменных колебаний мощности.
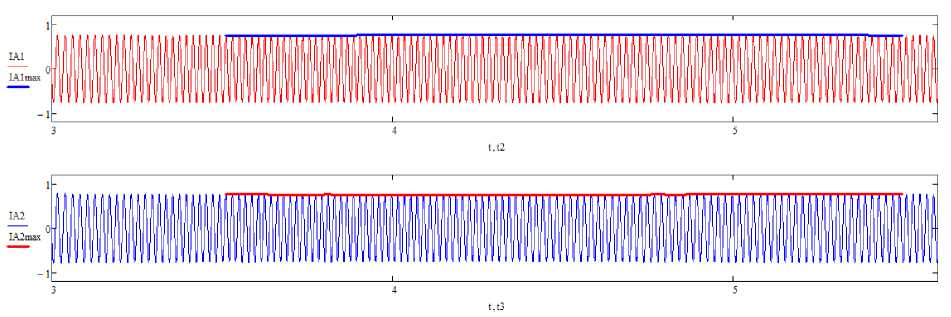
Рис. 8. Результаты работы блока устранения обменных колебаний мощности Fig. 8. The results of operation of the block for eliminating power exchange oscillations
Заключение
Для эксплуатации морских судов в беспилотном режиме на них устанавливаются дополнительные системы автоматического управления – расширенная судовая система управления техническими средствами, обзорно-поисковая система, подсистема видеонаблюдения. Такие системы позволяют управлять судном и его электротехническим комплексом в процессе выполнения технологических и производственных задач. Для корректного функционирования систем дистанционного управления необходимо обеспечить качественную работу судового электротехнического комплекса и устранить обменные колебания мощности при параллельной работе генераторных агрегатов. Такую возможность дает использование блока устранения обменных колебаний мощности, который интегрируется в систему управления автономным электротехническим комплексом. Блок УОКМ управляет настройками регуляторов частоты вращения дизель-генераторных агрегатов в соответствии с разработанным алгоритмом и уменьшает амплитуду обменных колебаний мощности до допустимого уровня. Так, в результате экспериментальных исследований в некоторых режимах работы судового электротехнического комплекса амплитуда обменных колебаний мощности достигала 30 %, что, безусловно, является недопустимым. Проверка разработанного алгоритма при помощи компьютерной программы показала возможность снижения амплитуды обменных колебаний мощности практически до нуля, хотя представляется достаточным ограничение до 3–5 %. Таким образом, системы дистанционного управления судном в беспилотном режиме обеспечиваются качественными условиями работы и гарантированно снабжаются электрической энергией.
