Особенности ориентации навигационных космических аппаратов

Автор: В.Е. Чеботарев, А.В. Фатеев
Журнал: Космические аппараты и технологии.
Рубрика: Новые материалы и технологии в космической технике
Статья в выпуске: 2, 2018 года.
Бесплатный доступ
Проведен анализ особенностей целевого использования навигационного космического аппарата. Сделан вывод о необходимости детального моделирования воздействующих гравитационных сил от Земли, Луны, Солнца и сил негравитационной природы для высокоточного прогнозирования движения космического аппарата на длительный период. Также сделан вывод о необходимости запрета на использование реактивных систем для разгрузки исполнительных органов системы ориентации космического аппарата в течение всего срока активного существования. Рассмотрены общие требования, предъявляемые к системе ориентации навигационного космического аппарата. Приведены преимущества ориентированного космического аппарата по отношению к неориентированному. Рассмотрено влияние погрешности ориентации навигационных антенн на качество излучаемого сигнала. Проведена оценка влияния погрешности ориентации панелей солнечных батарей на величину снимаемой с них мощности. Определены принципы построения системы ориентации, удовлетворяющие требованиям навигационного космического аппарата в части точности. Рассмотрены особенности ориентации навигационных космических аппаратов на теневых орбитах. Приведена формула для расчета длительности теневого участка от Земли. Приведена кинематика движения направления на Солнце из центра масс космического аппарата для невозмущенного вращения осей космического аппарата. Представлены результаты анализа динамики ориентации космического аппарата при прохождении особых зон теневых орбит и разработаны рекомендации по организации упреждающих разворотов. Сформулированы специальные требования к системе ориентации навигационного космического аппарата. Представлена оценка влияния погрешности ориентации космического аппарата на величину сил от солнечного давления, действующего на космический аппарат. По результатам данной оценки был сделан вывод о влиянии погрешности системы ориентации на ошибку прогнозирования движения центра масс космического аппарата.
Навигация, навигационный космический аппарат, система ориентации, теневые орбиты, упреждающие развороты
Короткий адрес: https://sciup.org/14114744
IDR: 14114744 | УДК: 629.783.01:525:527 | DOI: 10.26732/2618-7957-2018-2-84-88
Features of orientation of navigating spacecrafts
The analysis of features of target use of a navigating spacecraft is carried out. The conclusion is drawn on necessity of detailed modelling of influencing gravitational forces from the Earth, the Moon, the Sun and forces of not gravitational nature for high-precision forecasting of movement of a spacecraft for the long period. Also the conclusion is drawn on necessity of an interdiction for use of jet systems for unloading of executive powers of system of orientation of a spacecraft during all term of active existence. The general requirements shown to system of orientation of a navigating spacecraft are considered. Advantages of the focused spacecraft in relation to the nondirectional are resulted. Influence of an error of orientation of navigating aerials on quality of a radiated signal is considered. The estimation of influence of an error of orientation of panels of solar batteries on size of removed capacity from solar batteries is spent. Principles of construction of system the orientations meeting requirements of a navigating spacecraft regarding accuracy are defined. Features of orientation of navigating spacecraft in shadow orbits are considered. The formula for calculation of duration of a shadow site from the Earth is resulted. The kinematics of movement of a direction on the Sun from the centre of weights of a spacecraft for not indignant rotation of axes of a spacecraft is resulted. Results of the analysis of dynamics of orientation of a spacecraft are presented at passage of special zones of shadow orbits and recommendations about the organization of anticipatory turns are developed. Special requirements to system of orientation of a navigating spacecraft are formulated. The estimation of influence of an error of orientation of a spacecraft on size of forces from the solar pressure operating on a spacecraft is presented. By results of the given estimation the conclusion has been drawn on influence of an error of system of orientation on an error of forecasting of movement of the centre of weights of a spacecraft.
Текст статьи Особенности ориентации навигационных космических аппаратов
Космический аппарат (КА) в навигационной системе используется как радионавигационная точка с известными координатами и шкалой времени, излучающая навигационный сигнал, охватывающий всю подспутниковую территорию земного шара и близлежащее околоземное космическое пространство.
Радионавигационный сигнал используется потребителем для измерения псевдодальности и радиальной скорости ее изменения, а также получения навигационной информации о параметрах движения спутника на каждый момент измерения
(эфемеридах) и оцифрованной шкалы спутникового (бортового) времени [1; 2].
Радионавигационный сигнал в измерительном контуре должен обладать высокой стабильностью частоты и фазы сигнала, излучаться через антенну, диаграмма которой охватывает весь земной шар и близкое околоземное космическое пространство (глобальная диаграмма). Наличие смещения фазового центра антенны от продольной оси КА вносит погрешность в определении местоположения потребителя из-за произвольного взаимного углового положения КА – потребитель, если у потребителя отсутствует дополнительная информация о динамике разворота КА на теневых орбитах.
Для высокоточного прогнозирования движения КА на длительный период (несколько су- ток) необходимо детальное моделирование воздействующих гравитационных сил от Земли, Луны, Солнца и сил негравитационной природы (реактивных сил, светового давления, излучение передатчиков и др.). Факторы ориентации КА, имеющие случайный характер воздействия и не-поддающиеся моделированию в части светового давления, должны быть ограничены за счет реализации определенных мероприятий при проектировании и изготовлении навигационных КА. Кроме того необходим запрет на использование реактивных систем для разгрузки исполнительных органов системы ориентации КА в течение его срока активного существования. В результате система ориентации навигационного КА должна удовлетворять как общим, так и специальным требованиям, обеспечивающим его точностные характеристики [3].
Общие требования к системе ориентации
Организация заданного углового положения КА в пространстве расширяет его функциональные возможности и повышает эффективность выполнения им целевых задач в течение всего срока активного существования [4].
Ориентированное положение КА в пространстве создает следующие преимущества:
-
• ориентация антенн КА на рабочую зону поверхности Земли увеличивает информативность и надежность его радиолинии;
-
• ориентация солнечных батарей (СБ) на Солнце повышает энергетические возможности системы электропитания КА;
-
• ориентация двигателей коррекции (ДК) по направлению, связанному с вектором скорости КА, обеспечивает проведение орбитальных маневров;
-
• ориентация КА в пространстве создает возможность реализации более комфортного теплового режима.
Система управления угловым движением КА относительно его центра масс должна выполнять задачи успокоения, ориентации и стабилизации, аварийной ориентации и др. На КА информационного обеспечения такая система называется системой ориентации и стабилизации (СОС).
Выходным показателем СОС является точность ориентации КА, которая может быть различной по осям ориентации. СОС условно можно разделить на грубую (погрешность более 1 ° ), точную (погрешность от 0,1° до 1°) и прецизионную (погрешность менее 0,1°). Формулирование требований к точности ориентации КА осуществляется исходя из его назначения и располагаемых ресурсов (массы, энергопотребления) на реализацию функции ориентации с заданной точностью.
Наличие погрешности ориентации антенн приводит к необходимости соответствующего расширения диаграммы направленности и снижения ее усиления [4]:
y
f -К_ 1 2 , К. = Кг
V Ф о + 2Фа ) а к у
Ф о
V Ф о + 2 Ф а >
,(1)
где φ 0 – ширина диаграммы антенны; K y – коэффициент усиления антенны; φ A – погрешность ориентации антенны; K u , K 0 – нормировочные коэффициенты; K A – коэффициент эффективности ориентации антенны.
Зависимость относительной погрешности ориентации антенны от требований к эффективности ориентации (2) приведена на графике рис. 1.
Ф = 0.5
Ф о
I. к
- 1
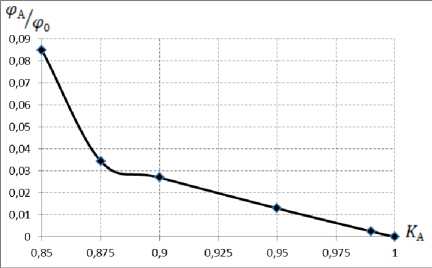
Рис. 1. Зависимость «точность-эффективность» ориентации антенн
Для информационных КА требуемое значение коэффициента KA находится в пределах 0,9…0,95, что соответствует значениям
ϕ
A = 0,027…0,013.
ϕ 0
Поэтому может быть применима любая схема ориентации в зависимости от ширины диаграммы направленности антенны.
Наличие погрешности ориентации СБ на Солнце снижает величину снимаемой мощности [2]:
Р СБ = Р СБ " К СБ ; К СБ = cos Ф СБ , (3) где K СБ – коэффициент эффективности ориентации СБ; φ СБ – погрешность ориентации СБ; P 0 , P – номинальная и эффективная мощность СБ.
Зависимость погрешности ориентации СБ φ СБ от требований к эффективности ориентации K СБ приведена на рис. 2.
Для информационных КА обеспечивается грубая ориентация СБ на Солнце, при которой допускается снижение эффективности не более чем на 1,5 %.

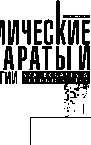
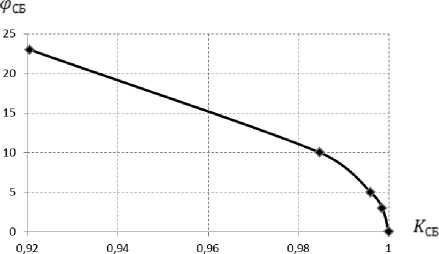
Рис. 2. Зависимость «точность-эффективность» ориентации СБ
Том 2
на точность навигационных определений за счет обеспечения высокоточного моделирования динамических процессов ориентации КА, особенно на период прохождения им теневых орбит [2; 4].
Расчет воздействия сил светового давления на плоскую панель СБ, отслеживающей направление на Солнце с погрешностью φ , проводится по известным формулам [4; 5], учитывающими составляющие от поглощенного, зеркального и диффузно-отраженного суммарного солнечного потока и представленного в виде двух ортогональных векторов:
-
• параллельно нормали к панели СБ:
Требования к ориентации вектора тяги ДК по заданному направлению формируются исходя из следующих условий [4]:
-
• обеспечение заданной эффективности выдачи импульса:
J э = J 0 ⋅ K дк , K дк = cos φ дк ; (4)
-
• ограничение на возмущающую составляющую импульса в поперечном направлении:
J воз = J 0 ⋅ K воз , K воз = sin φ дк , (5)
где J 0 – номинальное значение выдаваемого импульса; J э , J воз – эффективная и возмущающая составляющие выдаваемого импульса; K дк , K воз – коэффициенты составляющих импульса.
Зависимость погрешности ориентации φ дк от требований к эффективности ориентации подобна графику на рис. 2, а от K воз приведена на рис. 3.
Рис. 3. Зависимость точности ориентации вектора тяги ДК от коэффициента возмущающего импульса
Для информационных КА определены следующие требования: K дк ≥ 0,9 и K воз ≤ 0,1. Это допускает применение грубой схемы ориентации вектора тяги ДК.
Специальные требования к ориентации навигационных КА
Как было изложено ранее, для навигационного КА является важным снижение воздействия факторов, связанных с функционированием СОС, fН = P0 • S СБ • cos Ф
(1 + Р з о) ' cos Ф + 3 Р до .
; (6)
-
• в боковом направлении (в плоскости панели):
f б = P 0 ⋅ S СБ ⋅ cos ϕ ⋅ sin ϕ (1 - ρ з . о .), (7)
где P 0 – удельная сила светового давления, в районе Земли P 0 = 4,6 ⋅ 10–6 Н/м2; S СБ – площадь СБ; ρ з.о. – коэффициент зеркального отражения; ρ д.о. – коэффициент диффузного отражения.
Ошибку в прогнозирование движения КА вносит только боковая составляющая f б .
На максимальных солнечных орбитах нормаль к панели СБ перпендикулярна плоскости орбиты, а на максимальных теневых орбитах нормаль к панели СБ параллельна плоскости орбиты. Таким образом, боковая составляющая силы f б может занимать произвольное положение относительно вектора скорости спутника, в том числе совпадать с ним [4].
Для наихудшего случая погрешность прогнозирования положения КА вдоль орбиты ∆ l Н , обусловленная наличием постоянной погрешности ориентации СБ φ СБ в течение всего витка, составит [4; 5]:
∆ l = А ⋅ n 2 ⋅ sin ϕ , Н Н B СБ
3 2 P 0 ⋅ S СБ
А Н = T КА ⋅ (1 - ρ з . о .), Н 2 КА M КА з . о .
где n B – количество витков; T КА – период обращения КА; M КА – масса КА.
Для навигационных КА на среднекруговых орбитах примем следующий диапазон реализации коэффициента А Н ≈ 100…150 м. Тогда при φ СБ ≈ 1° предельная погрешность прогнозирования КА за виток составит 7…10 м.
Фактически период совпадения направления f б с направлением скорости t СБ кратковременен. В этом случае расчет уходов КА вдоль орбиты осуществляется по следующему уравнению [4; 5]:
Δ l И = А Н ⋅ sin ϕ СБ ⋅ 2 ⋅ t СБ . (9)
T КА
Так, при φ СБ ≤ 20º и допустимому значению
∆ l И ≤ 2 м, СБ ≤ 0,01 ( t СБ < 20 мин.).
T КА
Проведенные оценки подтверждают необходимость реализации мероприятий по повышению точности ориентации СБ навигационных КА.
Заключение ходимость их учета при формировании требований к его системе ориентации.
-
2. Проведен анализ целевой эффективности ориентации антенн, СБ, ДК и сформулированы общие требования к каждому каналу ориентации.
-
3. Определены специальные требования к каналу ориентации СБ, удовлетворяющие требованиям навигационного КА в части точности эфемерид.
-
1. Проведен анализ особенностей целевого использования навигационного КА и обоснована необ-
Список литературы Особенности ориентации навигационных космических аппаратов
- Харисов В. Н. ГЛОНАСС. Принципы построения и функционирования / под ред. В. Н. Харисова [и др.]. М. : Радиотехника, 2010. 800 с.
- Чеботарев В. Е., Косенко В. Е. Основы проектирования космических аппаратов информационного обеспечения : учеб. пособие ; Сиб. гос. аэрокосм. ун-т. Красноярск, 2011. 488 с., [24] с ил.
- Чеботарев В. Е. Проектирование космических аппаратов систем информационного обеспечения : учеб. пособие : в 2 кн. Кн. 2. Внутреннее проектирование космического аппарата / Сиб. гос. аэрокосм. ун-т. Красноярск, 2006. 140 с.
- Сетевые спутниковые радионавигационные системы / В. С. Шебшаевич, П. П. Дмитриев, Н. В. Иванцевич [и др.] ; под ред. В. С. Шебшаевича. 2-е изд., перераб. и доп. М. : Радио и связь, 1993. 408 с.
- Эльясберг П. Е. Введение в теорию полета искусственного спутника Земли. 2-е изд. М. : Либроком, 2011. 544 с.
- Dilssner F., Springer T., Gienger G., Dow J. The GLONASS-M satellite yaw-attitude model // Advances in Space Research. URL: http://acc.igs.org/orbits/glonass-attitude-model_ASR10.pdf
- Фатеев А. В., Емельянов Д. В., Тентилов Ю. А., Овчинников А. В. Прохождение особых участков орбиты навигационным космическим аппаратом системы ГЛОНАСС // Вестник СибГАУ. 2014. № 4 (56). С. 126–131.
- Патент РФ № 2569999. Способ ориентации навигационного спутника. Заявка № 2014117401/11 от 29.04.2014 / Тентилов Ю. А., Фатеев А. В., Васильев А. А., Емельянов Д. В., Овчинников А. В., Бюл., 2015. № 34.
- Иванов Н. М., Лысенко Л. Н. Баллистика и навигация космических аппаратов. М. : Дрофа, 2004. 544 с.
- Dilssner F. The satellite of Glonass-M, orientation model on yaw // Advances in Space Research. URL: http://www.sciencedirect.com
