Особенности применения электропривода механизма подъема в «интеллектуальном» модуле измерения массы породы в ковше экскаватора

Автор: Потапенко Анатолий Николаевич, Гайдуков Кирилл Юрьевич, Белоусов Александр Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Современные наукоемкие инновационные технологии
Статья в выпуске: 4-3 т.16, 2014 года.
Бесплатный доступ
В статье рассматривается проблема контроля и управления процессом загрузки породой грузового транспорта для дальнейшего вывоза из карьера. Приведены различные существующие способы измерения массы породы, их особенности и предлагается метод измерения массы, основанный на использовании электропривода в модуле измерения.
"интеллектуальный" модуль измерения, порода, электропривод
Короткий адрес: https://sciup.org/148203260
IDR: 148203260 | УДК: 62-531.5
Features of use the electric drive of lifting mechanism in «intellectual» module of rocks mass measurement in the excavator bucket
In article the problem of control and management of rocks loading process of cargo transport for further export from a pit is considered. Various existing ways of rocks mass measurement, their features are given and the method of weight measurement based on use of the electric drive in the measurement module is offered.
Текст научной статьи Особенности применения электропривода механизма подъема в «интеллектуальном» модуле измерения массы породы в ковше экскаватора
над уровнем борта части насыпи, и массой породы, загруженной в думпкар. Однако этот метод сложен и не точен за счет разнородности пород и различной степени разрыхления [1]. Тот факт, что этими методами определяется масса породы на дальнейших этапах транспортировки после погрузки, не позволяет производить контроль за погрузкой непосредственно во время самого процесса.
Существуют методы определения массы породы непосредственно в ковше экскаватора. Это позволяет направлять информацию о массе загружаемой породы машинисту экскаватора, который и будет осуществлять контроль за процессом погрузки. Чаще всего для загрузки породы используют одноковшовые экскаваторы типа ЭКГ (экскаватор карьерный гусеничный), имеющий общий вид с его основными механизмами, как показано на рис. 1.
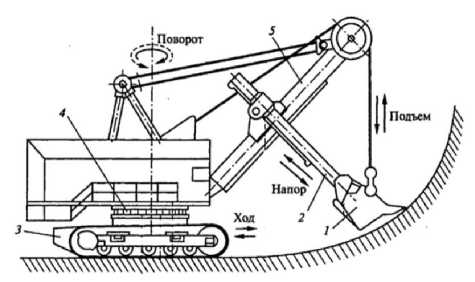
Рис. 1. Механическое оборудование экскаватора: 1 – ковш; 2 – рукоять; 3 – ходовая тележка; 4 – поворотная платформа; 5 – стрела
Существует несколько способов измерения массы породы в ковше экскаватора, например, по усилию в двуногой стойке. В каждом рабочем цикле при повороте на выгрузку и при повороте в забой отслеживаются и запоминаются на время данного цикла одновременно положение ковша и усилие в двуногой стойке. Определение массы грунта в ковше производится путем сравнения усилий в двуногой стойке до выгрузки и после нее. Тарировка тензометрической точки производится при вертикально расположенных подъемных канатах и горизонтально расположенной рукояти карьерного гусеничного экскаватора [2]. Существует методика, основанная на использовании модели экскаватора. При работе экскаватора происходит автоматическое и непрерывное измерение эталонной величины при помощи модели рабочего оборудования экскаватора, следящей за текущими положениями груженого ковша экскаватора. При работе экскаватора груз модели экскаватора в каждый текущий момент занимает то же положение, что и груженый ковш экскаватора в пространстве, и создает усилие в подъемном канате, пропорциональное действию массы порожнего ковша экскаватора, воспринимаемое измерителем. Другой измеритель в эти же моменты измеряет усилие в подъемном канате экскаватора, пропорциональное действию массы груженого ковша. При вычитании выходных сигналов измерителей получают усилие в подъемном канате, пропорциональное действию массы материала, транспортируемого ковшом экскаватора или любом положении его в пространстве. Полученное усилие сравнивают с усилием в подъемном канате модели, пропорциональном массе уже известного груза, и по соотношению этих усилий определяют массу материала, транспортируемую ковшом экскаватора. Известна методика определения массы ковша, заключающаяся в определении текущего значения величины вектора положения ковша в пространстве и определение параметра, характеризующего массу ковша путем изменения усилия в подъемном канате [3]. Недостатком этих способов является их сложность и неточность, особенно при моделировании, из-за отсутствия полного соответствия между моделью и реальным оборудованием.
Альтернативой этим методам является использование электропривода механизмов экскаватора в измерительном модуле. Во время экскавации в одноковшовом экскаваторе с прямой лопатой работают три главных механизма: подъема, поворота и напора ковша. Работа электроприводов основных рабочих механизмов экскаватора характеризуется большой частотой включений, резкими изменениями нагрузки, частым реверсированием, поэтому к электроприводу экскаватора предъявляются особые требования. Например, наиболее характерной особенностью работы механизма напора, как иногда и механизма подъема, является возможность его вынужденной остановки во время работы в случае встречи ковша с непреодолимым препятствием. Такой режим называется работой на упор или стопорением. Для обеспечения надежной и безаварийной работы главного рабочего механизма требуются снижение момента до допускаемых пределов при стопорении и «мягкость» характеристики его приводного двигателя с тем, чтобы частота вращения двигателя могла быть автоматически замедлена (иногда до нуля) при достаточно большом увеличении нагрузки. Автоматическое изменение частоты вращения двигателя в зависимости от момента осуществляется по экскаваторной характеристике, например, приведенной на рис. 2.
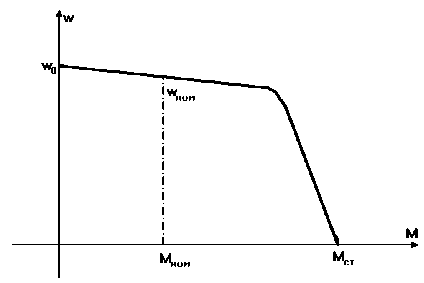
Рис. 2. Экскаваторная характеристика электропривода
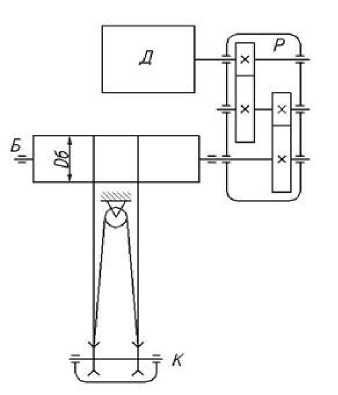
Рис. 3. Кинематическая схема механизма подъема: Д - двигатель, Р - редуктор, Б - барабан, К -ковш, D6 - диаметр барабана
Электропривод подъемного механизма предназначен для управления скоростью и направлением перемещения ковша в вертикальной плоскости. Основными являются следующие технологические функции для лопат: подъем ковша в процессе копания в забое, подъем или опускание ковша для разгрузки в транспорт или отвал и опускание ковша при возвращении в забой. Основные функции для драглайна: поддержание малого натяжения канатов при черпании грунта в забое, подъем ковша после заполнения к голове стрелы, удержание в процессе разгрузки и опускание снова в забой [4]. Механизм состоит из подъемной лебедки и канатов. Реверсивная лебедка приводится в движение индивидуальным двигателям через редуктор. Кинематическая схема механизма подъема приведена на рис. 3.
На основании осциллограмм напряжений и токов в приводе механизма подъема, снятых во время работы экскаватора, были получены нагрузочная диаграмма и тахограмма движения для данного привода (рис. 4 и рис. 5 соответственно).
экскаватора. Работа привода описывается основным уравнением динамики:
dw м-мс = /- — dr
где M – момент силы на валу двигателя; ω – угловая скорость; M с – момент статических сопротивлений; J – приведенный момент инерции двигателя; d ω /d t – угловое ускорение. Так как при равномерном движении, угловая скорость равна нулю, то тогда М = М с .
Момент статических сопротивлений, в свою очередь представляет собой уравнение вида:
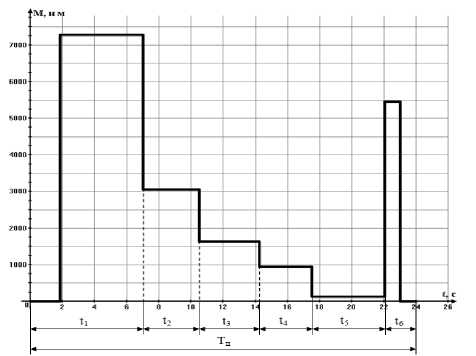
Рис. 4. Нагрузочная диаграмма привода механизма подъема
где ν – скорость подъема (или опускания ковша); η – КПД механических передач; F c – усилие статического сопротивления, в данном случае, это вес ковша и породы в нем.
Таким образом, момент статических сопротивлений пропорционален весу ковша экскаватора. Из уравнения (2) следует
Угловая скорость ω и линейная скорость подъема ν , в рассматриваемом случае связаны следующим соотношением:
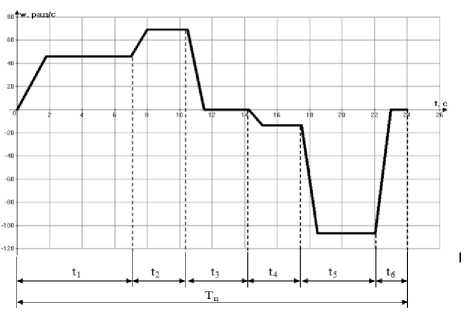
Рис. 5. Тахограмма движения привода механизма подъема
где i – передаточное отношение механической передачи.
Угловую скорость на валу двигателя можно определить, зная число оборотов двигателя – n в виде
Число оборотов двигателя механизма будет измеряться датчиком. Для электропривода постоянного тока, момент на валу двигателя М можно найти следующим образом:
м = С ■ /я; (6)
По оси абсцисс на этих рисунках отложены следующие временные отрезки: t1 – копание (черпание грунта или породы), t2 – поворот, t3 – разгрузка, t4 – разворот, t5 – опускание в забой, t6 – подхват ковша, Тц – время рабочего цикла где С – конструктивный коэффициент двигателя; Iя – ток в якорной цепи.
Для измерения величины тока в якорной цепи в системе будет использоваться датчик тока. Активная выходная мощность двигателя Р 2 равна:
Потребляемая двигателем активная мощность Р 1 определяется в виде:
^1 — ^2 + ^rrJ (8)
тогда с учетом известных соотношений получим
^1 ^2 + Ai " ^ + ^я " ^я' (9)
где R я - сопротивление якорной цепи двигателя; E - электродвижущая сила двигателя, равная:
Таким образом, учитывая потери в двигателе можно судить о массе ковша и находящейся в нем породе исходя из потребляемой двигателем Р 1 с последующей разработкой автоматизированной системы контроля и управления процессом загрузки карьерных машин. «Интеллектуальный» измерительный модуль в данном случае будет получать информацию от электропривода за счет применяемых датчиков технологических параметров, т.е. сам электропривод будет включен в измерительный модуль.
В дальнейшем эмпирическим путем будут получены зависимости потребляемой двигателем мощности и числа оборотов двигателя от величины массы породы в ковше экскаватора – m1, на основании которых контроллер будет производить вычисление m1 в процессе загрузки, в реальном режиме времени. Предлагаемый «интеллектуальный» модуль измерения массы материала в ковше экскаватора в динамическом отношении будет описываться, как это предложено в [5, 6], а именно, с учетом применения электроприводов в измерительном модуле в условиях определения уровня загрузки мельниц. При данном подходе нет влияния ни степени разрыхленности породы, ни ее разнородности на измерение. Однако в дальнейшем будет необходимо учитывать особенности, связанные с режимами работы экскаватора и его вибрацией при работе в реальных условиях.
Список литературы Особенности применения электропривода механизма подъема в «интеллектуальном» модуле измерения массы породы в ковше экскаватора
- Бауте Жоаким, В.К. Разработка методов учета объема горной массы и продуктов ее переработки применительно к условиям разработки месторождения Намапа. Автореф. дис. на соиск. учен. степ. канд. тех. наук. -Криворожский технич. универ., 1997. 23 с.
- Хусаинов, В.Г. Обоснование и расчет эргономических показателей карьерных гусеничных экскаваторов производства ОАО «УРАЛМАШ». Автореф. дис. на соиск. учен. степ. канд. тех. наук. -ГОУ ВПО «Уральский государственный горный университет», 2006. 24 с.
- База патентов: Способ определения массы ковша экскаватора-драглайна -режим доступа: http://patentdb.su/4-861485-sposob-opredeleniya-massy-kovsha-ehkskavatora-draglajjna.html
- Ключев, В.И. Теория электропривода: Учеб. для вузов. 2-е изд. перераб. и доп. -М.: Энергоатомиздат, 2001. 704 с.
- Сибирцева, Н.Б. Методы измерения уровня загрузки мельниц, основанные на физических процессах современных централизованных системах смазки/Н.Б. Сибирцева, А.Н. Потапенко, Н.А. Семилетов//Известия Самарского научного центра Российской академии наук. 2010. Т.12, №4(3). С. 694-647.
- Сибирцева, Н.Б. Особенности автоматизации загрузки сырьевой мельницы в составе систем АСДУ/Н.Б. Сибирцева, А.Н. Потапенко, А.Н. Семернин//Известия Самарского научного центра Российской академии наук. 2011. Т. 13, №1(3). С. 641-645.
