Особенности проектирования содержания практических занятий по теории механизмов и машин

Бесплатный доступ
Рассматриваются вопросы проектирования содержания общетехнической дисциплины «Теории механизмов и машин» на примере практического занятия по разделу «Кинематический анализ рычажных механизмов». В содержании вышеуказанного раздела выделяются основной и процессуальный блоки. В основном блоке приводятся сведения по кинематическому анализу, а в процессуальном - описываются методы его реализации.
Кинематический анализ, основной блок дисциплины, проектирование содержания, процессуальный блок дисциплины
Короткий адрес: https://sciup.org/147248899
IDR: 147248899 | УДК: 37.022:001
Текст научной статьи Особенности проектирования содержания практических занятий по теории механизмов и машин
Выполненные ранее исследования Е. П Грошевой [3] и других исследователей [2] по проектированию содержания общетехнических дисциплин позволили сформулировать конкретные требования к содержанию общетехнической дисциплины «Теория механизмов и машин» (ТММ), в том числе в ее практической части, направленной на развитие творческих способностей, основными среди которых являются: 1) содержание общетехнической дисциплины в соответствии с поставленной целью формируется и реализуется через структурные компоненты методической системы – целевой, содержательный, процессуальный и диагностический; 2) содержание общетехнической подготовки, должно формироваться на основе интеграции дисциплины ТММ, сопутствующих дисциплин естественнонаучного, общетехнического и специального циклов и самостоятельной работы в условиях квазипрофессиональной инновационной деятельности; 3) учебные дисциплины общетехнической подготовки в техническом вузе должны рассматриваться в единстве содержательного и процессуального компонентов; 4) в содержании дисциплины ТММ, как и в содержании других общетехнических и сопутствующих дисциплин, фундаментальное научное и техническое знание должно быть представлено в единстве, при этом первое составляет его инвариантную часть, второе - варьируемую; 5) содержание варьируемой части дисциплины ТММ должно быть связано с содержанием профессиональной и специальной подготовки студентов втузов для определения содержания варьируемого (профессионально направленного) материала; 6) содержание курсов общетехнических дисциплин следует группировать вокруг фундаментальных физических и научнотехнических теорий, что позволяет реализовать целостность профессионального образования; 7) учебно-методический комплекс должен включать, наряду с традиционными структурными элементами (рабочие программы, учебно-методический материал лекций и т. п.), систему информационно-компьютерной поддержки курса в виде электронных учебников, пакетов прикладных программ и других программных средств, позволяющую студентам втузов самостоятельно получать знания и умения по дисциплине и осуществлять самоконтроль уровня усвоения материала.
В связи с вышеперечисленным рассмотрим непосредственно вопросы конструирования содержания дисциплины ТММ. В соответствие с дидактической моделью учебного предмета, предложенной И. К. Журавлевым и Л. Я. Зориной [2], она включает два блока - основной и процессуальный. В основной блок входит содержание дисциплины, имеющее непосредственное отношение к ней. А в процессуальный - дополнительные материалы, обеспечивающие усвоение знаний, формирование различных умений, компетенций, а также развитие и воспитание обучающихся. Для обучения ТММ в основной блок включаются предметные знания, а в процессуальный - комплекс вспомогательных знаний (логических, методологических, философских, историко-научных, межпредметных, оценочных).
Таким образом, в основной блок содержания ТММ по разделу «Кинематический анализ механизмов» можно включить нижеследующий материал [4; 5].
Современные машины включают в себя механизмы, образованные группами Асура 2-го класса, всех пяти видов, а также группами более высоких классов, обеспечивающими движение выходных звеньев с требуемыми кинематическими параметрами. Для определения их величин достаточно удобен графоаналитический метод, предусматривающий построение планов скоростей и ускорений. Рассмотрим некоторые предпосылки к использованию этого метода.
Планом скоростей (ускорений) называется такое построение [1], при котором векторы абсолютных скоростей (ускорений) выходят из одной точки, называемой полюсом. Они обладают рядом свойств [4]: 1) векторы, выходящие из полюса плана представляют в определенном масштабе абсолютные скорости (ускорения) точек механизма; 2) векторы, соединяющие концы векторов абсолютных скоростей (ускорений), представляют в определенном масштабе относительные скорости (ускорения) точек механизма; 3) все неподвижные точки механизма лежат в полюсе плана; 4) отношение относительной скорости (касательного ускорения) к соответствующей длине звена есть угловая скорость (ускорение) этого звена; 5) фигуры, образованные векторами на плане подобны фигурам, составленным звеньями механизма и сходно с ними расположенные.
Планы строятся для конкретного положения механизма, изображенного в масштабе, в следующей последовательности: 1) задается закон движения ведущего звена, обычно принимается за основу, что оно вращается равномерно; 2) строится план скоростей группы Асура, непосредственно присоединенной к ведущему звену и стойке; 3) строится для этой же группы план ускорений; 4) строятся планы скоростей и ускорений следующей присоединенной группы, так продолжается до тех пор, пока не будут построены планы скоростей и ускорений всех групп механизма [5].
Задача кинематического анализа механизма считается полностью решенной, если для каждого звена механизма известны положения, скорости и ускорения двух его точек, или -положение, скорость и ускорение одной точки и угловая координата, угловая скорость и угловое ускорение самого звена. Для облегчения решения этой задачи в таблице приведены схемы построения планов для структурных групп 2-го класса всех 5-ти видов и пояснения к ним.
Процессуальный блок рассмотрим на примере определения скорости и ускорения точки М 2 методом планов [5] для механизма, изображенного на рисунке 1, при следующих исходных данных: угловая скорость вращения кулисы ан = 100 рад/с; длина коромысла АВ 1 ав = 0,6м; длина отрезка 1 ам = 0,3м. Для этого построим планы скоростей и ускорений. Составим векторные уравнения. Скорость точки А 1 вычислим по формуле V а = а • lOA = 100 • 0,3 = 30 м / с.
В масштабе проведем вектор Pa , перпендикулярно звену ОА и направленный в сторону вращения кулисы 1.
Скорость точки А 2,з найдем из графического решения системы векторных уравнений
V A2 — V A3 — V A1 + V A2A1
// ОА
V A3 — V B + V A3B = 0 1 АВ
Из точки a i плана проводим линию параллельную звену ОА, из полюса проводим линию перпендикулярную звену АВ , на пересечении получаем точку а 2, 3 .
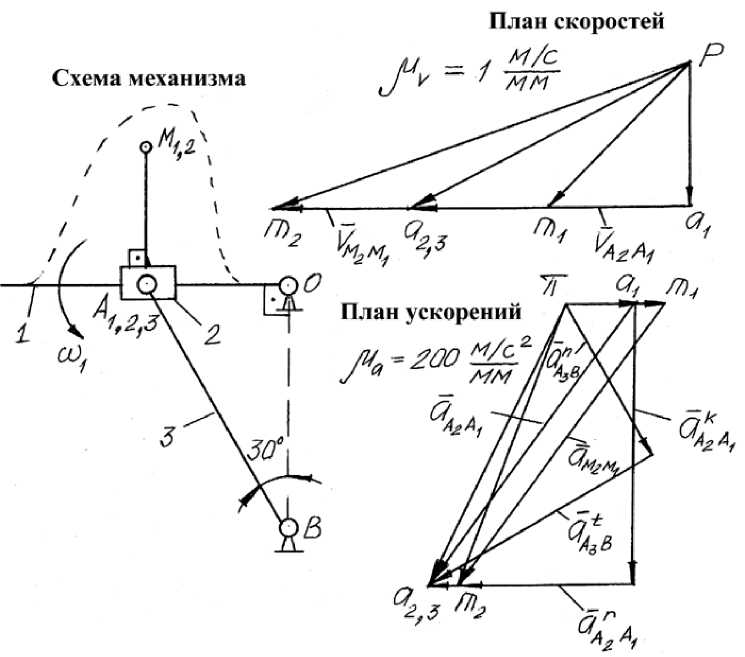
Рис.1. Построение планов скоростей и ускорений.
Для определения скорости точки М2 вычислим скорость точки vМ^ = ^ .lOM = 100.0,3/cos450 = 42,4м/с и изобразим ее на плане. Скорость точки М2 найдем из графического решения векторного уравнения vМ2 = vМ1 + vМ2М], скорость v М2М1 = v А2А1 как скорости поступательного движения 2-го звена.
Из построенного плана определим скорости точки М 2 и относительной скорости точки А 2 относительно точки А 1
vм2 = pm2 • ^ = 92 -1 = 92 м/ с; vлгЛ = ага2 • ^ = 60 -1 = 60 м / с
Построим план ускорений, вычислим ускорение точки А 1
а л, = rf • lOA = 1002 • 0,3 = 3000 м / с 2
Ускорение точки А2,3 определим из графического решения системы векторных уравнений: Кr аА2 = аА1 + аА2А1 + аА2А1 ЮА // ОА I nt алз = аВ + алзВ + а А3В ,
= J
// АВ 1 АВ
К где а^^ = 2 • щ • vaa = 2-100 ■ 60 = 12000 м/с2 - кариолисово ускорение, имеет направление вектора v A A повернутого на 900 в сторону вращения кулисы;
r aA A – релятивное ускорение;
а\ в = v A 3- = 67- = 7490 м / с2
lAB 0,6
–
нормальное ускорение,
направлено к центру
вращения;
t аА В– касательное ускорение.
м / с 2
Выберем масштаб построения ^ = 200----, в этом масштабе вычисленные a мм ускорения будут выражены отрезками следующей длины:
|а^ | = 15 мм ; а КК, 1 = 60 мм; \а n B| = 37,5 мм .
Построив соответствующие вектора, определим ускорение точки А 23 , а л2 = п а з . ^ е =
68 . 200 = 13600 м/с2.
Вычислим ускорение точки М 1 а м = щ 2 • l = 1002 • 0,3/cos 45 0 = 4240 м покажем с 2
этот вектор на плане. Местоположение точки М 2 определим из графического решения системы векторного уравнения.
аМ2 = аМ1 + аМ2М1, где а М2М1 = а А2А1
Из построенного плана определим искомое ускорение точки М 2
ам2 =nm2 • ца = 64 • 200 = 12800 м/ с2.
Ответ: v м2 = 92 м / с ; а м2 = 12800 м / с 2.
Описанный метод определения кинематических параметров (скорости и ускорения) позволяет для такого сложного механизма, достаточно просто и наглядно вычислить искомые параметры, что особенно важно в прикладных задачах механики.
Таким образом, проектирование содержания общетехнических дисциплин на основе сформулированных положений и включением в его состав двух блоков (основного и процессуального) обеспечивают соблюдение следующих дидактических принципов: принцип действенности знаний, принцип наглядности обучения, принцип связи теории с практикой обучения и др., а также способствуют развитию творческого потенциала студентов.
Список литературы Особенности проектирования содержания практических занятий по теории механизмов и машин
- Артоболевский И. И. Теория механизмов и машин. - М.: Наука, 1975. - 640 с.
- Журавлев И. К., Зорина Л. Я. Дидактическая модель учебного предмета // Новые исследования в педагогических науках. - 1979. - № 1. - С. 18-23.
- Наумкин Н. И. Методическая система формирования у студентов технических вузов способностей к инновационной инженерной деятельности: монография / под ред. П. В. Сенина, Л. В. Масленниковой, Д. Я. Тамарчака. - Саранск: Изд-во Мордов. ун-та, 2008. - 172 с. EDN: QMGBXV
- Наумкин Н. И., Раков Н. В., Купряшкин В. Ф. Теория механизмов и машин и ее приложение в АПК: учебник / под общ. ред. П. В. Сенина, Н. И. Наумкина. - Саранск: Изд-во Мордов. ун-та, 2012. - 220 с. EDN: VCSNQJ
- Наумкин Н. И. Сборник задач по теории механизмов и машин. - Саранск: Изд-во Мордов. ун-та, 2008. - 296 с. EDN: QNCCPB
