Особенности сопровождения маневрирующих целей с быстроизменяющейся скоростью в радиотехнических устройствах

Автор: Поздняков Андрей Александрович, Калинин Тимур Валерьевич, Ходатаев Николай Андреевич, Шаталов Александр Андреевич
Рубрика: Математическое моделирование
Статья в выпуске: 3, 2018 года.
Бесплатный доступ
Одной из задач, стоящей перед радиотехническими устройствами, является определение радиолокационных характеристик различных объектов и принятие решения о принадлежности этих объектов к тому или иному классу, т. е. процесс радиолокационного распознавания (классификации). Однако для некоторых типов объектов весьма затруднительно принять решение о принадлежности его к какому-то конкретному классу до возникновения необходимых условий. В данной статье рассмотрены особенности сопровождения целей, находящихся на активном участке траектории полета (участке управляемого движения).
Адаптивная фильтрация, обнаружение маневров, сопровождение сложных целей, участок управляемого движения, фильтр калмана, модели ускорения
Короткий адрес: https://sciup.org/148309008
IDR: 148309008 | УДК: 621.396.96 | DOI: 10.25586/RNU.V9187.18.09.P.37
Special features of tracking maneuvering targets in the radio devices
One of the tasks facing the radio devices is to determine the radar characteristics of various objects and to decide whether these objects belong to a particular class. However, for some types of objects it is very difficult to decide whether it belongs to a particular class before the necessary conditions arise. In this article, the features of tracking the targets located on the active sections of the flight trajectory (the guided work area).
Текст научной статьи Особенности сопровождения маневрирующих целей с быстроизменяющейся скоростью в радиотехнических устройствах
На протяжении многих лет развития теории движения динамических систем методы расчета траекторий полета летательных аппаратов как объектов управления постепенно и неуклонно совершенствовались. При этом основное внимание уделялось точности вычислений. Вместе с тем развитие науки и практика решения разнообразных задач все время выдвигали так называемые «вызовы». При этом определяющей являлась уже не только точность как таковая, а правильность оценки ситуаций, а также оперативность расчетов, обусловленная требованием учета движения совокупности наиболее важных элементов [1].
Одним из направлений развития современной радиолокации, а также методов и способов обработки радиолокационной информации является тенденция к увеличению информативности наблюдений, выполняемых с помощью радиолокационных систем (РЛС) [2].
Многие цели, находящиеся на активном участке траектории (АУТ) (участке управляемого движения), не могут быть отнесены к какому-то конкретному классу, пока они не перейдут на пассивный участок (обусловленный действием силы земного тяготения). Для этого такие цели должны быть обнаружены и находиться на сопровождении до момента, когда закончится воздействие управляющих сил и будет произведено достоверное распознавание. Но на этапе обнаружения и сопровождения таких целей возникает масса нестандартных ситуаций.
При окончании участка управляемого движения объектов вне целевых зон радиотехнических устройств (РТУ), предназначенных для обработки информации от неуправляемых целей, они попадают в эти зоны на пассивном участке с баллистической характеристикой движения. Алгоритмы работы этих РТУ рассчитаны именно на такую работу, так как подавляющее количество целей для нее находится на пассивном участке движения. Однако если переход на пассивный участок траектории (ПУТ) происходит в целевой зоне, образуется составная цель, состоящая из целевого объекта РТУ и отделяющихся отработавших элементов, чье движение может быть как баллистическим, так и управляемым. Они, как правило, имеют бóльшую эффективную площадь рассеивания, и завязка траектории происходит именно по ним, в то время как целевой объект до точки перехода на ПУТ остается незаметным ввиду большого ускорения, свойственного активному участку, и особенностей алгоритмов обработки сигналов таких РТУ. Целевая зона для повышения эффективности РТУ может быть разбита на барьеры в соответствии с ожидаемыми направлениями появления объектов. Из-за их ограниченности целевой объект, даже перейдя на пассивный участок, не успевает достоверно идентифицироваться из-за меньшего количества замеров от цели, чем необходимо для достоверной классификации. В случае с выводом объекта выше барьерной зоны повышается вероятность ошибок первого рода, а также вероятность неправильной классификации обнаруженного объекта [3]. При этом возможно возникновение нескольких событий.
-
1. Окончание участка управляющего воздействия и образование составной цели происходит вне целевой зоны РТУ. Это штатная ситуация, алгоритмы работы с объектами таких РТУ успешно с ней справляются.
-
2. Окончание участка управляющего воздействия происходит вне целевой зоны РТУ, а образование составной цели происходит в нижней барьерной зоне. В этом случае цель является сложной с отделяющимися частями.
-
3. Окончание участка управляющего воздействия и образование составной цели происходит в целевой зоне РТУ. В этом случае цель является маневрирующей и сложносоставной с отделяющимися частями.
-
4. Окончание участка управляющего воздействия происходит в барьерной зоне РТУ, а образование составной цели – выше нижней барьерной зоны. РТУ имеет дело с маневрирующей целью с вероятностью отделения частей от нее.
-
5. Окончание участка управляющего воздействия и образование составной цели происходят выше нижней барьерной зоны. РТУ имеет дело с маневрирующей одиночной целью.
Под маневром понимается возникновение изменения (скачка) скорости движения объекта [4].
В связи с этим в интересах специальных РТУ возникает необходимость решения комплексной проблемы сопровождения целей. В дополнение к традиционной задаче оценивания параметров траектории одиночной цели необходимо решать следующие задачи идентификации:
-
– определение числа целей, подлежащих сопровождению и установлению динамики их движения (баллистический или маневренный полет);
-
– распознавание отметок от сопровождаемых целей с последующим обновлением соответствующих траекторий.
В теории цифровой обработки радиолокационной информации существуют два основных источника неопределенностей:
-
– непредсказуемые маневры целей (неопределенность содержится в параметрах модели);
-
– наличие многочисленных отметок, вызванных отраженными от множества целей или ложными тревогами [3].
Рассмотренные события предполагают наличие обеих неопределенностей.
ВЕСТНИК РОСНОУ. Серия «Сложные системы…»
Физически адекватные модели движения фрагментов баллистического объекта (БО) служат имитаторами входных данных для разработчиков алгоритмов функционирования информационных средств и их моделей и являются неотъемлемой составляющей общих комплексных моделей космических систем, с использованием которых производятся оценки эффективности информационных систем в различных вариантах их применения [1]. При этом всегда стремятся упростить моделирующие уравнения с минимальным ухудшением точности модели, а следовательно, качество сопровождения [3].
Теория оптимальной линейной фильтрации основана на гипотезе о точном соответствии моделей динамики состояний системы и измерений исследуемым физическим процессам. Такая априорная информация действительно необходима для создания оценивателя с минимальной дисперсией, поскольку и структура фильтра, и его параметры должны быть строго «настроены» на ожидаемое состояние. Однако на практике столь полными знаниями о модели располагают довольно редко; чаще имеются лишь оценки (с некоторой неопределенностью) статистических характеристик шума и начального состояния системы. Кроме того, линейная модель часто является лишь приближенным описанием реальных динамических систем и наблюдаемых процессов. В частности, применительно к проблемам цифровой обработки радиолокационной информации наиболее важным источником неопределенности о движении цели являются непредсказуемые маневры. Как правило, параметры цели (момент начала маневра, его продолжительность и интенсивность) неизвестны. Ускорение обычно учитывается в виде стационарного входного воздействия, хотя такая модель процесса неточно отражает физическую сущность явления. Неопределенность в этом случае заключается в том, что зависимость от времени среднего значения и ковариации процесса ускорения неизвестны. Другим источником неопределенности является наличие нескольких целей или ложных отметок вблизи экстраполированного положения цели. Задача состоит в том, чтобы определить, какая из отметок является истинной, т. е. информация о какой отметке должна объединяться с экстраполированными данными для получения отфильтрованной оценки. Неопределенность здесь связана не со значением неизвестного параметра, а с правдоподобием альтернативных гипотез. Поиск оптимальных и субоптимальных решений задач осуществляется методами теории адаптивной фильтрации. Параметры таких фильтров корректируются в соответствии с входными данными. Другими словами, алгоритм фильтра «подстраивается» к оцениваемым параметрам модели поступающей информации. В реальных системах сопровождения необходимо одновременно обеспечить высокое качество фильтрации шума и быстрое реагирование на резкие маневры цели. Следовательно, в алгоритме сопровождения, удовлетворяющем этим требованиям, должны быть предусмотрены средства обнаружения факта маневрирования и адаптации параметров и (или) архитектуры фильтра в соответствии со складывающейся реальной обстановкой [3].
Калмановский подход представляет собой единую методическую базу для решения различных задач. Фильтр Калмана является оптимальным для выработки оценки состояния системы при следующих условиях:
-
- модели системы и датчика линейны;
-
- случайные возмущения и ошибки распределены по гауссовскому закону.
Применение моделей, сформированных в соответствии с теорией оптимальной фильтрации, связано с некоторыми трудностями:
-
- математическое описание составляющих ускорения как шумового процесса представляет определенные трудности;
-
- уравнение измерений дискретно;
-
- радиолокационные измерения параметров цели осуществляются с некоторой вероятностью [3].
Калмановский фильтр не может быть непосредственно использован, так как требует, чтобы возмущающие воздействия описывались гауссовским белым шумом.
Главной характеристикой маневра являются ускорения. Они бывают двух типов: продольные (приводящие к изменению скорости) и поперечные (изменяющие направление движения).
Независимо от типа используемой системы координат математическая модель движения цели в одном физическом измерении может быть представлена в виде сле- дующих разностных уравнений:
x k + 1 = x k + x k T + 0,5 a x , k T 2,
x k + 1 = x k + a x , k T ,
где x k ,x k - положение и скорость цели при к -м цикле обзора; a x к - ускорение цели; Т - период обзора РЛС. Следовательно, при одношаговой экстраполяции траектория цели моделируется с использованием полинома второй степени (по времени) для положения и первой степени - для скорости. Следующим шагом является описание характера ускорения цели. В первом приближении можно принять, что ускорение представляет собой стационарную случайную нормально распределенную переменную с нулевым средним значением и заданной дисперсией. Предполагается также, что ускорение в данный момент времени не зависит от ускорений, имевшихся в другие моменты времени [3].
Следует обратить внимание на то, что принятие гипотез о гауссовском распределении и белом спектре ускорений цели обеспечивает непосредственное использование калмановского алгоритма. Однако если гипотеза о гауссовском распределении не принята, то соответствующий оптимальный фильтр должен быть нелинейным. Далее, если ускорения коррелированы во времени, то необходимо применять «отбеливающие» процедуры и дополнять вектор состояния. Если процесс ускорения нестационарен, то следует применять более сложные модели цели и соответствующие алгоритмы фильтрации [3]. Объекты, находящиеся на участке управляющих воздействий, имеют распределение скоростей и ускорений негауссовского характера, как правило, отвечающее требованиям заложенной программы полета.
Кроме моделирования ускорения цели гауссовским белым или коррелированным стационарным случайным процессом, применяется усовершенствованная модель цели без использования гипотезы о стационарности. В основе предлагаемого подхода лежит полумарковская модель описания маневра цели с дискретизацией возможных ускорений летательных аппаратов. Маневры цели моделируются с помощью полу-марковского процесса, т. е. случайного процесса с конечным числом состояний, которые выбираются в соответствии с вероятностями перехода марковского процесса. Полумарковский процесс отличается от марковского тем, что время его нахождения в одном состоянии до перехода в другое само является случайной величиной [3].
Модель, основанная на коррелированных во времени случайно изменяющихся маневрах, более адекватно отражает физическую сущность реальных процессов. Задача состоит в формировании оптимального фильтра сопровождения цели при случайных ускорениях, вызывающих отклонение цели от баллистической траектории [3].
Возможным решением этой проблемы является использование процедуры обнаружения маневра, которая предполагает адаптивную подстройку параметров фильтра в соответствии с оценкой ускорения. Данная процедура может быть реализована с помощью формирования узкого (внутреннего) и широкого (внешнего) стробов в экстраполированной точке. Если отметка о цели попадает во внутренний строб, то значения параметров фильтра устанавливаются небольшими. И, напротив, если отметка выходит за пределы внутреннего строба, но попадает во внешний, то значения параметров увеличиваются. Действия, предпринимаемые после обнаружения маневра, представляют собой повторное инициирование фильтра. При использовании предложенной процедуры следует учитывать возможности замирания отраженных сигналов и ложные тревоги. В этих целях при обнаружении маневра могут формироваться две траектории. Первая траектория строится по отметкам, попадающим во внешний строб;
при построении второй траектории отметки внешнего строба не учитываются, а экстраполируется уже имеющаяся траектория. Неопределенность снимается после нескольких последовательных циклов обзора, и одна из траекторий стирается. Рассмотренные процедуры просты и дают хорошие результаты, если ускорение цели невелико, вероятность обнаружения высока и вероятность ложной тревоги мала. Кроме того, траектории целей должны быть разнесены в пространстве на достаточно большое расстояние. Однако в реальных условиях указанные допущения не всегда выполняются, что приводит к неопределенностям при сопоставлении отметок и траекторий [3].
Эффективность алгоритмов может быть повышена при разделении траекторий на классы (например, стационарные, баллистические, траектории с маневрирующей целью) и последующей их обработке с учетом приоритета каждого класса и с использованием различных корреляционных стробов. Допустимо также принятие гипотезы о возможности обновления траектории с учетом ошибочно выбранной отметки. Вероятность этого события является мерой достоверности процесса привязки. Следует отметить подход, при котором используется дополнительная информация об отметках и траекториях. Например, повышения точности привязки, осуществленной с использованием меры пространственной близости, можно добиться, анализируя ситуацию с учетом измерений радиальной скорости [3].
Чтобы избежать использования стробов очень больших размеров при сопровождении стационарных и баллистических целей, размер корреляционного строба согласовывается с классом цели. При сопровождении баллистической цели размер строба зависит от ошибок измерений и экстраполяции, а при сопровождении маневрирующей цели учитывается также ее ускорение [3].
Рассмотрим логику выполнения операций экстраполяции и сглаживания в течение первых трех циклов обзора РЛС. По первым двум отметкам осуществляется завязка траектории, а по оценке скорости экстраполируется положение отметки во время 3-го цикла обзора. Отметка, полученная на 3-м цикле обзора, позволяет скорректировать экстраполированные координаты и скорость цели. На рис. 1 иллюстрируется уменьшение ошибок экстраполяции за счет обработки расширенной последовательности отметок, а также изображены стробы, которые корректируются на каждом цикле обзора. Площадь строба, пропорциональная ошибке экстраполяции, уменьшается с ростом цикла обзора [3].
Известно, что строб должен иметь как можно меньшие размеры, поскольку при наличии ложных отметок в строб больших размеров их будет попадать больше. В то же время строб должен иметь достаточно большие размеры, чтобы сигнал, отраженный от цели в следующем цикле обзора, попал в него с высокой вероятностью [3].
Цели, находящиеся на активном участке движения (участке управляемого полета), характеризуются быстроизменяющейся скоростью и резким изменением значения ускорения (особенно в моменты переходов между режимами работы исполни-
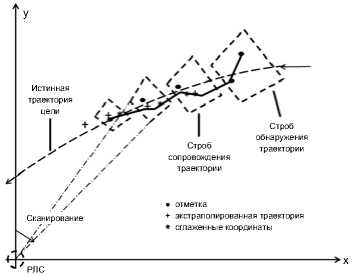
Рис. 1. Сопровождение в режиме обзора тельных элементов). В связи с этим можно сделать вывод, что на размер строба влияет дополнительный фактор, требующий сохранения достаточно больших размеров, так как маневр цели, информация о котором заложена в программе полета, относительно значений скорости и ускорения экстраполировать не представляется возможным.
Рассмотрим случай, когда между отметкой и сопровождаемыми траекториями корреляция отсутствует, т. е. когда полученная отметка не попадает в стробы сопровождаемых траекторий и когда для одной или более траекторий во время очередного цикла обзора не получены новые отметки. В первом случае может быть принята гипотеза о формировании новой траектории, для проверки которой применяются алгоритмы завязки траектории. Во втором случае траектория экстраполируется либо (если отсутствует ряд отметок в последовательных циклах обзора) сбрасывается (этап прекращения сопровождения) [3].
В случае быстрого изменения значения скорости и ускорения, как и в случае с целями на участке управляемого полета, очередная полученная отметка не попадает в строб очередного цикла. В первом случае, если цель в момент маневра находится в барьерной зоне обзора, формируется новая траектория; во втором случае, если цель преодолела барьерную зону, происходит сбрасывание траектории. Для РТУ, производящих долгосрочный расчет траекторий, это сбрасывание приводит к недостаточному расчету параметров цели, вследствие чего происходит или неправильная классификация, или пропуск цели.
Рассмотрим алгоритм обнаружения маневра. Он представляет собой решающее правило, с помощью которого определяется момент начала маневра. Кроме того, такой алгоритм позволяет оценить параметры (интенсивность, длительность) маневра. Алгоритм основан на обработке обновляющей последовательности в фильтре сопровождения с достаточно узкой полосой, необходимой для подавления шума и сопровождения баллистических целей. Если маневры являются событиями редкими, то используется обычный калмановский фильтр. Однако если маневрирующие цели все же появляются, то обнаружение маневра осуществляется на основе анализа обновляющей последовательности. Обнаружение маневра может быть основано на контроле в реальном времени обновляющей последовательности и выявлении отклонений среднего значения от нуля, а самой последовательности - от гауссовского некоррелированного процесса [3].
Методы сопровождения охватывают три связанные между собой задачи:
-
1) обнаружение маневра;
-
2) коррекция оценки состояния калмановского фильтра для компенсации ошибки, обусловленной начальной стадией маневра;
-
3) настройка параметров калмановского фильтра в соответствии с ожидаемым маневром.
При решении задачи обнаружения маневра цели наибольшие трудности вызывает формирование модели маневра. После того как выбор модели маневра цели сделан, используется обычно один из двух подходов. При подходе, предложенном Бар-Шаломом, после обнаружения маневра осуществляется повторная инициализация фильтра на основе результатов последних измерений. При этом исходят из того, что поскольку новые параметры фильтра получены по данным, характеризующим маневр цели, то ошибка корректируется автоматически. При втором подходе оцениваются (по критерию минимума средней квадратичной ошибки) входные параметры (время начала и интенсивность) маневра цели. Затем данные оценки используются для корректировки фильтра. Два указанных метода существенно отличаются друг от друга. В первом случае обнаружение маневра и коррекция рассматриваются как самостоятельные задачи. Во втором случае эти задачи решаются совместно, что позволяет непрерывно и рекурсивно производить вычисления [3].
Один из методов оценки входных параметров предложен в [4; 5]. Структура алгоритма, реализующего этот метод, включает большое число параллельно работающих фильтров (при моделировании использовалось 20 фильтров). В работе [6] показана возможность получения аналогичных результатов с помощью более простого устройства сопровождения (включающего 2–3 фильтра), реализованного на основе первого подхода. В работе [7] предложен субоптимальный фильтр для сопровождения маневрирующей цели. Фильтр основан на использовании новой модели ускорения цели и линеаризованных измерений.
В статье [8] представлены структура дополнительного канала информации, а также уравнения функционирования процессора последовательности изображений цели. Анализируются зависимости между скоростью изменения признаков цели, частотой обновления изображения и чувствительностью процессора. Отмечается, что даже высокая частота смены изображений не гарантирует от ошибок в интерпретации пространственного положения цели. Дальнейшее увеличение этой частоты и усложнение алгоритмов обработки изображений приводит к замедлению реакции системы.
Вероятно, наиболее сложной проблемой в теории обработки радиолокационной информации является сопровождение нескольких целей. Эта проблема возникает, если цели находятся на небольших расстояниях друг от друга, что бывает при пересечении траекторий или при полете группой. В этих случаях корреляционные стробы накладываются друг на друга и получаемые отметки могут коррелировать с несколькими траекториями. Задача привязки результатов измерений к соответствующим траекториям еще больше усложняется, если некоторые отметки пропущены или присутствуют ложные отметки, обусловленные помехами. Применяют различные алгоритмы, которые основаны на разветвлении траекторий с учетом всех возможных пар траекторий и отметок. Ветви, характеризующиеся малой степенью правдоподобия, отбрасываются, а ветви с высоким уровнем правдоподобия используются для формирования траекторий. При сопровождении группы целей неопределенность в установлении принадлежности отметок и траекторий наблюдается на протяжении многих циклов обзора; этим данная ситуация отличается от ситуации, характерной для случая пересекающихся траекторий, когда цели находятся на минимальных расстояниях друг от друга лишь в течение нескольких циклов обзора. При сопровождении целей, находящихся в группе, представляется целесообразным перейти от индивидуальных траекторий к сопровождению всей группы. Процесс формирования оптимального алгоритма может быть разделен на следующие этапы:
-
– генерирование в каждом цикле обзора новых гипотез;
-
– оценивание вероятности каждой гипотезы;
-
– обновление траектории и формирование новых траекторий по данным 1-го и 2-го этапов [3].
Простейший и получивший широкое распространение метод заключается в выборе гипотезы о наиболее вероятной привязке данных и использовании обычного калма-новского фильтра для оценки состояния цели. Этот фильтр можно усовершенствовать таким образом, чтобы он, выбирая гипотезы по критерию максимального правдоподобия, в то же время позволял по росту ковариации калмановского фильтра определить возможную ошибочную привязку. При другом подходе концепция вероятностного ассоциирования данных распространяется на случай сопровождения нескольких целей. Такой подход равнозначен объединению всех гипотез, которое осуществляется формированием оценки целей, зависящей от результатов всех выполненных измерений [3]. Однако это в свою очередь приводит к увеличению вероятности ложной тревоги.
Важной задачей является обнаружение отклонений, приводящих к отделению целей, находящихся на флангах боевого порядка. Отличия в кинематическом поведении центральной траектории и по крайней мере одной из боковых траекторий свидетельствуют о наличии отделяющихся целей. Контроль отделения основан на сравнении переменных состояния центральной и боковых траекторий. Для разделения статистических и детерминированных дефектов при обнаружении отделения целей может использоваться какое-либо статистическое правило принятия решений. На простран- ственные размеры сопровождаемой группы оказывают влияние цели, покидающие группу и примыкающие к ней, следовательно, контроль за пространственными размерами группы и числом целей в ней должен осуществляться с помощью параллельно реализуемых алгоритмов. Сопровождение отделяющихся целей осуществляется с помощью ветвящихся алгоритмов, которые начинают функционирование как только цель удаляется на определенное расстояние от группы [3; 10].
Разнообразные методы и алгоритмы сопровождения нескольких целей можно отнести к одной из трех групп.
-
1. Методы, основанные на использовании совместной функции правдоподобия. Принимается, что модели изменения состояний для всех целей одинаковы, причем число целей не обязательно должно быть известно.
-
2. Методы совместного вероятностного сопоставления данных (СВСД). Модели для различных целей могут не совпадать. Вычисляются вероятности сопоставления (корреляции) целей только с результатами измерений, полученными в последнем цикле. Отличительной особенностью алгоритма является введение операции сглаживания с учетом одного и более результатов предыдущих измерений. Применение этого метода связано с большими вычислительными затратами. Один из вариантов преодоления этого недостатка заключается в рассмотрении задачи определения вероятностей соответствия отметок и траекторий как задачи оптимизации с ограничениями. Для решения этой задачи предложено использовать аналоговую нейровычислитель-ную сеть, обеспечивающую высокую производительность благодаря распараллеливанию вычислений. По точности данный алгоритм не уступает базовому и пригоден для сопровождения достаточно большого числа целей на фоне мешающих отражений умеренной плотности.
-
3. Методы, ориентированные на отметки целей (результаты измерений); иногда для этих методов используется название «фильтр с множеством гипотез». Эти методы основаны на вычислении того, что каждая известная или новая цель обусловливает определенную последовательность результатов измерений (отметок). Достоинством такого подхода является возможность объединения алгоритмов завязки траекторий и алгоритмов сопровождения. К таким методам относится алгоритм, предложенный в статье [9]. Показана возможность реализации данного алгоритма на базе многопроцессорной ЭВМ общего назначения с параллельной обработкой данных [3].
Важным достоинством многих РТУ является возможность получения информации о радиальной скорости цели. При этом радиолокационный сигнал обрабатывается с использованием набора фильтров, каждый из которых настроен на свою доплеровскую частоту, а общая полоса охватывает весь интервал возможных частот повторения импульсов. Дополнение измерений координат данными о радиальной скорости обеспечивает более точное оценивание параметров траектории, особенно при интенсивном маневрировании цели. Безусловно, измерение радиальной скорости дает лишь частичное представление о полных векторах скорости и ускорения. В то же время эта частичная информация позволяет существенно улучшить качество сопровождения. Кроме того, информация о радиальной скорости может быть использована для уменьшения неопределенности при установлении корреляционных связей между отметками и траекториями в сложных ситуациях, т. е. когда сопровождение ведется в условиях наличия множества целей. Измерение радиальной скорости позволяет получить весьма важную информацию о движении цели. Существенное повышение эффективности алгоритма достигается в том случае, если радиальная составляющая скорости практически не отличается от вектора скорости. Происходит существенное уменьшение средних ошибок определения скорости и координат в начале и при завершении маневра цели [3].
Временной интервал между двумя последовательными поступлениями информации о траектории цели существенно влияет на точность экстраполяции, особенно в тех случаях, когда цель движется с ускорением. Возможным способом адаптации устройства сопровождения к маневру является увеличение темпа измерений при ускорениях цели. Этот способ может быть реализован в РЛС с фазированной антенной решеткой (ФАР). При маневре цели высокий темп обновления данных уменьшает как смещение, так и дисперсию оценки траектории. Точность фильтрации прямо пропорциональна емкости памяти фильтра, выраженной в числе отметок, а время реакции зависит от постоянной времени фильтра. Кроме того, ошибка экстраполяции, обусловленная внезапным ускорением цели, пропорциональна интервалу времени между получением двух последовательных отметок. Поэтому при высоком темпе поступления данных требование высокой точности сопровождения не вступает в противоречие с требованиями высокой скорости реакции фильтра и малого смещения сопровождаемой траектории. Простой метод адаптации темпа получения данных о траектории основан на том, что ошибка экстраполяции при маневре цели является известной функцией параметра aT2. С помощью известных алгоритмов производится обнаружение начала и окончания маневра; это позволяет с помощью блока программирования ФАР выбирать необходимый период зондирования при сопровождении маневрирующей и неманеврирующей цели [3].
Таким образом, в РЛС с ФАР реализована возможность повторного зондирования в направлениях, в которых необходима верификация, что должно использоваться при обработке информации от таких целей, но это в свою очередь приводит к уменьшению пропускной способности. Если возникает необходимость выполнения высокоприоритетной функции, то вычислительный комплекс (ВК) прерывает работу системы в режиме с низким приоритетом и возвращается к нему вновь при наличии временного ресурса. В случае опасности информационной перегрузки из-за большого числа запросов ВК несколько снижает качество функционирования системы из-за невыполнения низкоприоритетных запросов [3]. Несомненно, цели подобного класса являются более приоритетными для РТУ, предназначенных для работы с баллистическими целями, и можно было бы большую часть ресурсов направить на сопровождение именно их, но в некоторых случаях такое решение проблемы недопустимо, исходя из тактических соображений.
При сопровождении целей, находящихся на малых дальностях, возможна перегрузка ВК, так как требуется более высокая скорость обновления информации, чем при слежении за удаленными целями. Учитывая тот факт, что участок управляемого полета занимает предположительно относительно небольшие дальностные рубежи целевых зон РТУ, такая ситуация может быть вполне актуальной.
Заключение
Из вышесказанного можно сделать вывод, что проблема сопровождения целей на АУТ является максимально сложной, включающей в себя большую часть неопределенностей, связанных с оптимальной фильтрацией. Возможность измерения радиальной скорости и применения ФАР положительно влияет на обнаружение и сопровождение как маневров, так и сложносоставных целей. Однако опыт применения показывает, что трудности, связанные с сопровождением таких целей, остаются и проблема до конца не решена.
Список литературы Особенности сопровождения маневрирующих целей с быстроизменяющейся скоростью в радиотехнических устройствах
- Алферьев В.А. Методы имитационного моделирования управляемого движения баллистических объектов: монография. - М.: ОАО МАК «Вымпел», 2016. - 126 с.
- Хрестинин Д.В., Поздняков А.А., Трофимов М.О. Программный комплекс моделирования системы радиолокационного распознавания для РЛС ДО // Актуальные научно-технические аспекты разработки, испытаний и эксплуатации средств ракетно-космической обороны: сб. ст. конф. ВКА им. А.Ф. Можайского. - СПб., 2017. - С. 141-147.
- Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей / пер. с англ.; под ред. А.Н. Юрьева. - М.: Радио и связь, 1993. - 322 с.
- Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации: учеб. пособие для вузов. - М.: Радио и связь, 1992. - 304 с.
- Bogler, P.L. Tracking a maneuvering target using input estimation // IEEE Trans. - 1987. - Vol. AES-23. - No 3. - P. 298-310.
- Farooq, M., Bruder, S. Comments on Tracking a maneuvering taget using input estimation // IEEE Trans. - 1989. - Vol. AES-25. - No 2. - P. 300-302.
- Song, T.L., Ahn, J.Y., Park, C. Suboptimal filter design with pseudomeasurements for target tracking // IEEE Trans. - 1988. - Vol. AES-24. - No 1. - P. 28-39.
- Sworder, D.D., Hutchins, R.G. Image-enhanced tracking // IEEE Trans. - 1989. - Vol. AES-25. - No 5. - P. 701-709.
- Chen, C.-W., Walker, R.A., Feng, C.-H. A branch-and-bound algorithm for multiobject tracking and its parallel implementation // Proc. IEEE American Control Conf. - 1988. - P. 1805-1810.
- Абраменко Е.В., Гладышев А.И., Евенко А.В., Жуков А.О., Захаров А.И., Прохоров М.Е. Метод построения и обоснование основных ТТХ бортового аппаратурного комплекса космических аппаратов для решения задач получения, передачи и обработки измерительной информации в оптическом диапазоне длин волн // Оборонный комплекс - научно-техническому прогрессу России. - 2017. - Вып. № 2 (134). - С. 26-31.
