Особенности управления приводными модулями с изменяемым передаточным числом для экстремальных условий применения мобильных робототехнических комплексов

Автор: Григорьев П.С., Лошицкий П.А., Мисбаков Д.А., Гук М.Ю., Трутс А.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 1 т.17, 2024 года.
Бесплатный доступ
В настоящей работе рассмотрены особенности управления приводными модулями мобильных робототехнических комплексов в отдельных режимах движения. Современные требования к массе и габаритам мобильных робототехнических комплексов, а также ограниченная мощность источников энергии на их борту создают препятствия для повышения тяговых характеристик приводных модулей. В качестве способа увеличения момента приводных модулей при сохранении мощности приводных двигателей принято изменение передаточного числа механической передачи. Статья отражает результаты проектирования приводных модулей с изменяемым передаточным числом, предназначенных для применения в составе шасси мобильных робототехнических комплексов. Приведены сведения о конструкции приводных модулей. В ходе исследования составлено математическое описание работы приводных модулей для отдельных режимов движения мобильных робототехнических комплексов. Из расчёта режима удержания в неподвижном состоянии на уклоне следует, что оптимальным решением является применение «пониженной» передачи редуктора при номинальном моменте приводного двигателя. По результатам расчёта предельного случая торможения на уклоне сформулированы требования к ограничению максимального момента приводных модулей, которые должны быть реализованы системой управления. Представлено математическое описание блоков, учитывающих нелинейные свойства компонентов приводных модулей. В результате работы определены критерии для построения корректной имитационной модели. Также описаны функции и компоненты системы управления приводным модулем. Сформулированы предложения по оснащению мобильных робототехнических комплексов сенсорами и системой сброса тормозной энергии для реализации функционала приводных модулей.
Мобильный робототехнический комплекс, мртк, шасси мобильного робота, приводной модуль, мотор-колесо, механизм изменения передаточного числа, система управления
Короткий адрес: https://sciup.org/146282830
IDR: 146282830 | УДК: 62-529
The control features of the drive modules with a variable gear ratio for the mobile robotics complexes in extreme conditions
This paper examines the features of mobile robotic systems drive modules control in separate motion modes. Modern requirements for mobile robotic systems such as weight and dimensions also the limited power of energy sources on the board create some obstacles to increasing the traction characteristics of drive modules. The mechanical transmission gear ratio changing was chosen as the method of increasing of the drive modules torque while maintaining the drive motors power. The article reflects the development results of the drive modules with variable gear ratios intended for use as part of the mobile robotic systems chassis. The paper provides information on the drive modules design. In the course of the work, a mathematical description of the drive modules operation for separate motion modes of mobile robotic systems was compiled. From the calculation of holding the mobile robotic system in a stationary state on a slope, it follows that the “reduced” gear at the drive motor rated torque is optimal mode. Based on the “braking on a slope” extreme case calculation results limitations for the drive modules performance were formulated. The requirements for limiting the drive modules maximum torque must be implemented by the control system. A mathematical description of blocks that take into account the nonlinear properties of drive module components is presented. As a result of the work, criteria for building a correct simulation model were drawn up. The functions and components of the drive module control system are also described. Proposals have been formulated for equipping mobile robotic systems with sensors and a brake energy release system to implement the functionality of drive modules.
Текст научной статьи Особенности управления приводными модулями с изменяемым передаточным числом для экстремальных условий применения мобильных робототехнических комплексов
This work is licensed under a Creative Commons Attribution-Non Commercial 4.0 International License (CC BY-NC 4.0).
Acknowledgements. This research is supported by the Ministry of Science and Higher Education of the Russian Federation. State assignment “Development of a drive module of increased radiation tolerance with a variable gear ratio and the use of an electromagnetic coupling” (FNRG-2022–0024, № 1021101316166–9–2.2.2).

Особенности управления приводными модулями с изменяемым передаточным числом для экстремальных условий применения мобильных робототехнических комплексов
П. С. Григорьев, П. А. Лошицкий, Д. А. Мисбаков, М. Ю. Гук, А. А. Трутс Центральный научно- исследовательский и опытно- конструкторский институт робототехники и технической кибернетики Российская Федерация, Санкт-Петербург
Цитирование: Григорьев П. С. Особенности управления приводными модулями с изменяемым передаточным числом для экстремальных условий применения мобильных робототехнических комплексов / П. С. Григорьев, П. А. Лошицкий, Д. А. Мисбаков, М. Ю. Гук, А. А. Трутс // Журн. Сиб. федер. ун-та. Техника и технологии, 2024, 17(1). С. 58–72. EDN: MACEAM
Ранее динамика МРТК была рассмотрена в исследовании [7], где проанализированы причины их неустойчивого поведения на наклонной плоскости. Обеспечение устойчивости МРТК является задачей системы управления МРТК. Для построения системы управления движением МРТК необходимо сначала разработать систему управления отдельным приводным модулем.
Описание конструкции приводного модуля
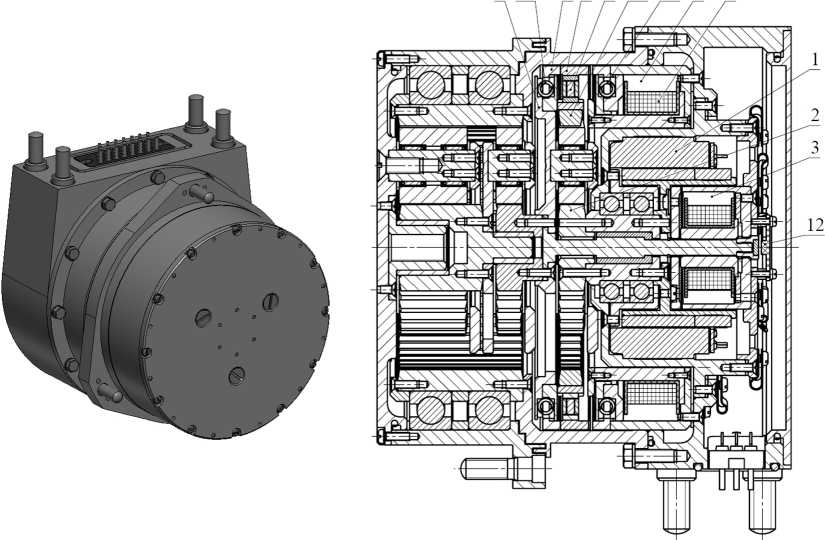
Приводной модуль представляет собой многооборотный шарнир, оснащенный МИПЧ, и предназначен для применения в составе шасси МРТК. Внешний вид и конструкция приводного модуля отражены на рис 1.
Основным функциональным элементом, входящим в состав приводного модуля, является агрегат приводной (поз. 1), состоящий из бескорпусного вентильного электродвигателя c постоянными магнитами KUBO JCM85x26P-27,4-H1-T1. Выбор электродвигателя обусловлен высокой номинальной мощностью 408 Вт и моментом на валу 2,6 Н∙м при компактных габаритах. Агрегат приводной соединен с шестерней (поз. 2), которая служит входом первой ступени планетарного редуктора.
8 11 5 6 9 10 11 4 7
а) б)
Рис. 1. Внешний вид (а) и конструкция (б) приводного модуля: 1 – агрегат приводной; 2 – солнечная шестерня; 3 – электромагнитный тормоз; 4 – статор МИПЧ; 5 – шунт; 6 – якорь МИПЧ; 7 – электромагнитная катушка; 8 – водило; 9 – кольцевой постоянный магнит; 10 – коронная шестерня; 11 – пружинный демпфер; 12 – датчик Холла
Fig. 1. Drive module appearance (a) and construction (b): 1 – drive unit; 2 – sun gear; 3 – electromagnetic brake; 4 – gear shifting mechanism stator; 5 – shunt; 6 – gear shifting mechanism anchor; 7 – electromagnetic coil; 8 – carrier; 9 – ring permanent magnet; 10 – ring gear; 11 – spring damper; 12 – Hall sensor
В состав приводного модуля входит нормально замкнутый электромагнитный тормоз (поз. 3). Номинальный тормозной момент создается усилием постоянного магнита и зубчатым торцевым зацеплением. Тормоз размыкается при подаче на электромагнитную катушку рабочего напряжения.
Планетарный редуктор имеет три ступени с передаточным отношением в каждой 4,2. Водило каждой ступени планетарной передачи является ее выходом и соединено с солнечной шестерней – входом последующей ступени. Такая конфигурация позволяет достичь максимального передаточного числа для каждой ступени редуктора.
Первая ступень планетарного редуктора оснащена МИПЧ, который состоит из статора (поз. ), шунта (поз. 5) и якоря (поз. 6). Статор (поз. 4) оснащён электромагнитной катушкой (поз. 7) и зафиксирован в корпусе приводного модуля, а шунт (поз. 5), в свою очередь, закреплен на водиле (поз. 8) первой ступени редуктора. Якорь (поз. 6) имеет в своем составе кольцевой постоянный неодимовый магнит (поз. 9). Якорь находится в одном из устойчивых положений: он примагничен либо к статору, либо к шунту.
При подаче тока на катушку в ней возникает магнитное поле, которое взаимодействует с магнитным полем постоянного магнита (поз. 9), и в зависимости от взаимного направления силовых линий двух магнитных полей якорь (поз. 6) либо притягивается к статору (поз. 4), либо отталкивается от него и примагничивается к шунту (поз. 5). После чего подача тока на электромагнитную катушку прекращается. В положении, когда якорь (поз. 6) примагничен к статору (поз. 4), коронная шестерня (поз. 10), зафиксированная на якоре, становится неподвижной, и первая ступень планетарного редуктора принимает конфигурацию с передаточным числом, равным 4,2. В положении, когда якорь (поз. 6) примагничен к шунту (поз. 5), коронная шестерня (поз. 10) жестко связывается с водилом (поз. 8) и вращается вместе с ним. При этом передаточное отношение первой ступени планетарной передачи становится равным единице.
Переключение МИПЧ во время работы редуктора сопряжено с риском поломки деталей с зубчатым торцевым зацеплением. Сопрягаемые детали испытывают существенную ударную нагрузку, величина которой зависит от их скорости. Для компенсации ударной нагрузки, а также предотвращения рывков при переключении МИПЧ в конструкции приводного модуля предусмотрены два пружинных демпфера (поз. 11). Демпфер выполнен из электротехнической стали, что позволяет использовать его в качестве шунта. Описанное совмещение сокращает массу деталей и повышает эффективность использования полезного объёма приводного модуля.
Положение МИПЧ определяет значение передаточного числа первой ступени планетарного редуктора, поэтому контроль положения МИПЧ можно выполнить посредством измерения скорости вращения водила (поз. 8), которое является выходом первой ступени редуктора, и сравнения полученных данных со скоростью вращения электродвигателя. Для измерения скорости вращения водила используется датчик Холла (поз. 12). Технические характеристики приводного модуля приведены в табл. 1.
Исходные данные и математическое описание динамики МРТК
Исходные данные для математического описания приводного модуля даны в табл. 2. Расчётная схема МРТК приведена на рис. 2.
При анализе режима работы приводного модуля приняты следующие ограничения:
-
1) мотор-колёса МРТК приняты абсолютно жёсткими, поверхность принята абсолютно жёсткой и гладкой, неровности поверхности отсутствуют,
Таблица 1. Характеристики приводного модуля
Table 1. The drive module parameters
|
Параметр |
Значение |
Ед. изм. |
|
|
Передача |
«повышенная» |
«пониженная» |
|
|
Передаточное отношение |
17,64 |
74,09 |
о.е. |
|
Номинальная скорость, не более |
85 |
20 |
об/мин |
|
Номинальный момент, не более |
45 |
192 |
Н∙м |
|
Масса, не более |
11,2 |
кг |
|
Таблица 2. Исходные данные для математического описания приводного модуля
Table 2. Input data for the drive module mathematical description
|
Параметр |
Обозначение |
Значение |
Ед. изм. |
|
Масса МРТК |
m |
300,00 |
кг |
|
Номинальная скорость движения МРТК |
v ном |
1,7 (6,0) |
м/с (км/ч) |
|
Расстояние от центра масс МРТК до оси приводного модуля по оси X |
V цм |
0,50 |
м |
|
Расстояние от центра масс МРТК до оси приводного модуля по оси Y |
Y цм |
0,25 |
м |
|
Расстояние между крайними осями приводных модулей МРТК |
L |
1,00 |
м |
|
Ускорение свободного падения |
g |
9,81 |
м/с2 |
|
Радиус приводного модуля |
r |
0,23 |
м |
|
Коэффициент полезного действия редуктора приводного модуля |
η |
0,90 |
о.е. |
|
Передаточное число передачи «повышенная» |
i 1 |
17,64 |
о.е. |
|
Передаточное число передачи «пониженная» |
i2 |
74,09 |
о.е. |
|
Момент инерции приводного модуля при «повышенной» передаче |
P i1 |
0,0048 |
кг*м2 |
|
Момент инерции приводного модуля при «пониженной» передаче |
P i2 |
0,0010 |
кг*м2 |
|
Постоянная электродвигателя |
K м |
0,45 |
Н ■ м ТВт |
|
Номинальный момент электродвигателя |
M ном |
2,60 |
Н*м |
|
Угол наклона поверхности к горизонту |
α |
35,00 |
градус |
|
Коэффициент трения |
µ |
0,70 |
о.е. |
-
2) угол наклона поверхности к горизонту принят постоянным,
-
3) коэффициент трения принят постоянным,
-
4) силы сцепления передних и задних мотор-колёс МРТК с поверхностью определяются условиями (1–3):
F
1 сц

p
1 трен-
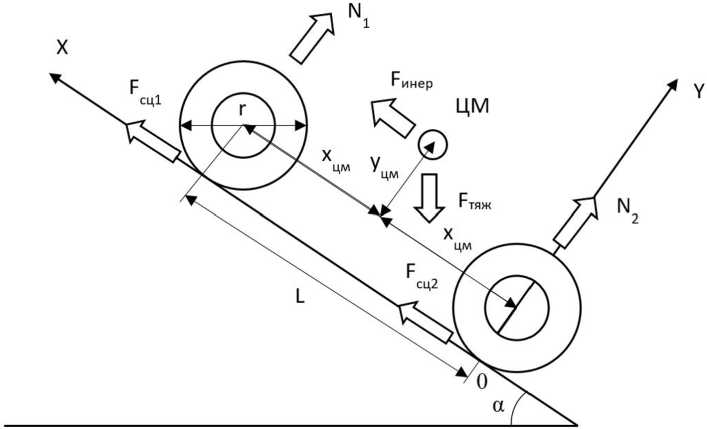
Рис. 2. Расчётная схема МРТК на уклоне: 0X – ось абсцисс, 0Y – ось ординат, α – угол наклона поверхности к горизонту, ЦМ – центр масс МРТК, r – радиус мотор-колеса, L – расстояние между осями крайних приводных модулей МРТК, Х ЦМ , У ЦМ – проекции расстояния от оси приводного модуля до центра масс МРТК на оси 0X и 0Y соответственно, F тяж – сила тяжести, F инер – инерционная сила, F сц1 , F сц2 – силы сцепления передних и задних мотор-колёс МРТК с поверхностью соответственно, N 1 , N 2 – реакции передних и задних мотор-колёс МРТК соответственно
Fig. 2. The design diagram of the mobile robotic system on a slope: 0X – abscissa axis, 0Y – ordinate axis, α – inclination angle of the surface to the horizon, ЦМ – mobile robotic system mass center, r – the motor-wheel radius, L – distance between the external drive modules axes of the mobile robotic system, Х ЦМ , У ЦМ – projections of the distance from the drive module axis to the mobile robotic system center of mass on the 0X and 0Y axes, respectively, F тяж – gravity force, F инер – inertial force, F сц1 , F сц2 – adhesion forces of the front and rear mobile robotic system motor-wheels with the surface, respectively; N 1 , N 2 – support reactions of the front and rear mobile robotic system motor-wheels respectively
FTpeH = —д ‘ N = —д ■ т ■ д ■ cosa, (3)
где Fсц – сила сцепления мотор-колеса МРТК с поверхностью, Н; Fтрен – сила трения мотор-колеса МРТК с поверхностью, Н; Mпо – момент оси (двух приводных модулей) МРТК, Н·м; r – радиус мотор-колеса, м; i – передаточное число редуктора приводного модуля, о.е.; η – коэффициент полезного действия редуктора приводного модуля, о.е.; Mном – номинальный момент электродвигателя приводного модуля, Н·м; μ – коэффициент трения, о.е.; N – реакция опоры мотор-колеса МРТК, Н; m – масса МРТК, кг; 9 – ускорение свободного падения, м/с2; α – угол наклона поверхности к горизонту, градус.
-
5) сумма сил трения, действующих на МРТК подчинена условию (4):
^1яж ' со SIX < FrpeH, (4)
где F тяж – сила тяжести, приложенная к центру масс МРТК, Н.
Математическое описание МРТК определяется выражениями (5) – (13). Сумма сил по оси X:
^сц1 + ^сц2 = mg Sin а + m^
где X – вторая производная координаты МРТК по оси 0X, линейное ускорение МРТК вдоль оси 0X, м/с2.
Сумма сил по оси Y:
N±+ N2 = mg C0S °-
Сила сцепления:
^СЦ1,2 —
^no „ ^П0
“^7“, если FTpeH > —
MnK‘
F pc ли F <---
1 трен' l TpeH —
Момент относительно первого колеса:
N2L = (Fem + Fcq2)r + mgsin ауцм + mgeos ахцм + тхуцм,
где L – расстояние между осями крайних приводных модулей МРТК, м.
Выражение (8) c учетом (5) приобретает вид:
N2L = mg sin a (r + уцм) + mx(r + уцм) + mg cos a хцм
или:
N2
_ m(gsino(N2Uj2ti^
L
тогда:
m(gsina
^1 = mg cos a--
L
Условие опрокидывания:
.. f L ХцМ . \
% = 2 cos a--sina .
\ ^ + Уцм /
Угол опрокидывания при статическом нагружении:
. -i F хцм a = tan ------ V + Уцм
Определим из (13) максимально возможный угол для шасси выбранной конструкции:
a = tan 1
1,00 - 0,50
0,23 + 0,25
Таким образом, угол наклона поверхности в 35 градусов является допустимым.
Определим из выражения (12) максимально возможное ускорение для угла 35 градусов:
.. / ^ ^цм .
x = g ■ cos a--sina
\ Г + Уцм .
1 - 0,5
0,82-----------
0,23 + 0,25
= 2,84 M
Из выражения (5) определим максимальную силу, развиваемую приводами колесными, соответствующую опрокидыванию шасси:
^ FC4 = 300 ■ 9,81 ■ 0,57 + 300 ■ 2,84 = 2367,02 H.
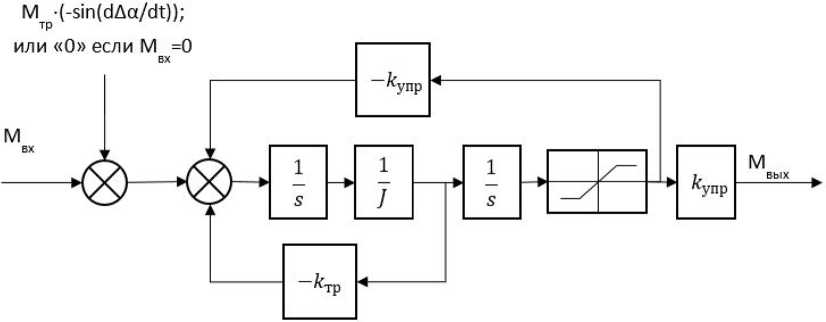
Рис. 3. Блок-схема математического описания пружинного демпфера: Мтр – момент, создаваемый силой трения, Мвх – момент, создаваемый приводным модулем, Мвых – момент, передаваемый демпфером, J – момент инерции приводного модуля, – интегрирующее звено, k упр – коэффициент упругости, k тр – коэффициент трения
Fig. 3. The functional diagram of the damper mathematical description: Мтр – torque created by the friction force, Мвх – torque created by the drive module, Мвых – moment transmitted by the damper, J – moment of the drive module inertia, – integrating link, k упр – stiffness coefficient, k тр – friction coefficient
Так как рассматривается крайний случай (опрокидывания шасси), то N 1 будет равно 0 и, соответственно, усилие по перемещению шасси создается только задней осью, тогда:
2 ■ 74,09 ■ 0,9 ■ 2,6 0^23
= 1507,53 H.
В конструкции приводного модуля присутствуют упругие элементы, демпфирующие ударные нагрузки на МИПЧ и редуктор. На рис. 3 представлена блок-схема пружинного демпфера. Данное математическое описание следует реализовать в имитационной модели для последующей настройки системы управления приводным модулем.
Анализ функционирования приводного модуля
Рассмотрим предельный случай неподвижного МРТК на уклоне 35 градусов. Проведём проверку возможности удержания МРТК приводными модулями на данном уклоне без применения электромагнитных тормозов.
Условие равновесия МРТК на уклоне – (14):
^сц ^трен-
В соответствии с формулой (3) и с учётом равенства (14) сила сцепления составит:
FC4 = -0,7 ■ 300 ■ 9,81 ■ 0,82 = -1688,04 Н.
Момент электродвигателя, необходимый для удержания МРТК в неподвижном состоянии на уклоне, вычислим как (15):
M^ = ^ (15)
Рассмотрим предельный случай нагрузки приводных модулей СРТК, когда сумма сил и моментов приложена только к передней паре приводных модулей, а реакции опор остальных приводных модулей пренебрежимо малы – режим, близкий к опрокидыванию МРТК на склоне. Для «пониженной» передачи редуктора i = i 2 , с учётом описанных выше условий, момент электродвигателя, необходимый для удержания МРТК в неподвижном состоянии на уклоне будет равен:
-1688,04- 0,23
M^nvn=-------------- = —2,62 H * m.
ЭДуд 2 ■ 74,09
Таким образом, момент электродвигателя близок к номинальному M ЭД ~ M ном . Из этого следует, что электродвигатель и передаточное число редуктора выбраны верно, а для удержания МРТК в неподвижном состоянии на уклоне требуется использовать «пониженную» передачу редуктора.
Рассчитаем мощность, потребляемую электродвигателем для удержания МРТК в неподвижном состоянии на уклоне по выражению (16):
^ЭДпотр (~7^ ) ' (16)
где P Э Д потр – потребляемая электродвигателем мощность, Вт; K М – постоянная электродвига-
H ■ м теля, .
VBt
Потребляемая электродвигателем мощность для удержания МРТК в неподвижном состоянии на уклоне составит:
2,62 , РЭДпотр = (—)2 = 33,90 Вт.
Рассмотрим предельный случай торможения МРТК на уклоне 35 градусов от номинальной скорости до нуля.
Примем, что торможение происходит, когда МИПЧ переключен на «пониженную» передачу i = i 2. В начальный момент торможения нагрузка приходится на одну ось приводных модулей. Рассчитаем предельный момент электродвигателя приводного модуля, при котором не произойдёт опрокидывания МРТК (17).
У F -r
МЭДпред = ■ (17)
^ Ясц = 300 ■ 9,81 ■ 0,57 + 300 ■ 2,84 = 2367,02 H.
2367,02 ■ 0,23
мэдпРед - 2.74 0g - 3’68 Н∙м.
Таким образом, при торможении МРТК система управления должна ограничить момент электродвигателя приводного модуля величиной 3,68 Н∙м.
Рассчитаем энергию, выделяемую при торможении МРТК (18).
где Δ E торм – энергия, выделяемая МРТК при торможении, Дж; υном – номинальная скорость движения МРТК, м/с; υ 0 – конечная скорость при торможении МРТК, принятая 0 м/с.
300-(1,72 - О2)
Л^торм =-------2-------= 433,5 Дж‘
Рассчитаем мощность, выделяемую МРТК при торможении (19).
ДР
_ _ ^^торм
где P торм – мощность, выделяемая МРТК при торможении, Вт; Δ t – время торможения МРТК, принятое 2 с.
433,5
Лорм = —— = 216,75 Вт.
Из этого следует, что МРТК должен быть оснащён системой сброса тормозной энергии в окружающую среду. Система сброса должна обеспечивать утилизацию мощности не менее P торм, так как при полностью заряженных батареях источника электроэнергии её избыток будет выделяться на активном сопротивлении компонентов МРТК.
Система управления приводным модулем
Система управления приводным модулем должна обеспечивать управление синхронным двигателем с постоянными магнитами, оснащённым датчиками положения ротора на эффекте Холла, управление электромагнитным тормозом и управление МИПЧ. Функциональная схема системы управления приводным модулем показана на рис. 4.
Три фазы двигателя и тормоз подключены к силовым выходам сервоусилителя, датчики Холла и датчик температуры – к его информационным входам.
Датчик углового положения вала, определяющий текущий угол поворота водила первой ступени редуктора, основан на эффекте Холла и подключается ко входу интерфейса SSI сервоусилителя. От датчика по интерфейсу передаются 12 бит данных угла положения.
В исходном положении (при отсутствии питания) нормально замкнутый тормоз двигателя обесточен, при этом силой постоянного магнита и зубчатым торцевым зацеплением создаётся номинальный тормозной момент. Для размыкания тормоза на катушку тормоза следует подать рабочее напряжение, обеспечивающее ток в катушке 0,2 А.
Обмотка МИПЧ подключена к источнику питания через реле Р1 (направление) и реле Р2 (включение-выключение). Токоограничивающие резисторы R 1 и R 2 позволяют задавать величины токов для каждого направления. Реле Р1 и Р2 подключены к дискретным выходам сервоконтроллера DO1 и DO2.
Начальное положение якоря МИПЧ, а, следовательно, и передаточное число редуктора заранее неизвестны. Переключение МИПЧ на требуемое значение коэффициента передачи осуществляется кратковременной подачей управляющего напряжения прямой или обратной полярности на катушку МИПЧ. При подаче напряжения положительной полярности МИПЧ включается на передаточное отношение 74,09, при подаче напряжения обратной полярности – на 17,64. При этом напряжение следует подавать через токоограничивающие резисторы, ограничивающие прямой ток значением 0,8 А, обратный ток – 1,27 А.
Датчик углового положения вала, определяющий текущий угол поворота водила первой ступени редуктора, позволяет определить положение МИПЧ в процессе движения. Скорость вращения вала определяется по разности показаний датчика угла при постоянной скорости опроса, умноженной на коэффициент пересчёта. При передаточном отношении 74,09 скорость вращения водила будет в 4,2 раза ниже скорости вращения двигателя, при передаточном отношении 17,64 скорости будут совпадать. Однако данный способ определения неприменим при нулевой скорости.
В общем случае при переключении МИПЧ скорость вращения двигателя должна мгновенно измениться в 4,2 раза, чтобы не возникало ударных усилий в механизме. Однако скорость вращения двигателя мгновенно изменить невозможно и требуется принимать определённые меры для минимизации ударной нагрузки.
Рассмотрим случай переключения МИПЧ в неподвижном состоянии МРТК при нагруженном приводном модуле. Когда МРТК неподвижен, вал двигателя приводного модуля удержи-
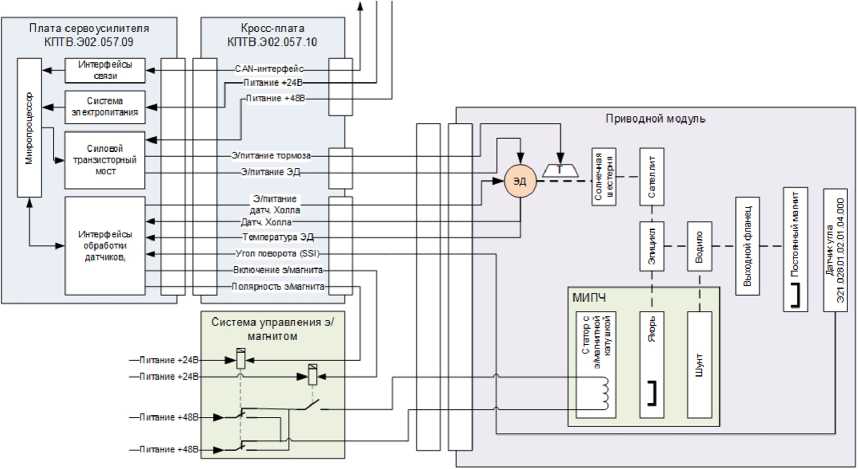
Рис. 4. Функциональная схема системы управления приводным модулем: ЭД – электродвигатель, Т – тормоз, МИПЧ – механизм изменения передаточного числа
Fig. 4. The functional diagram of the drive module control system: ЭД – electric motor, Т – brake, МИПЧ – gear shifting mechanism вается в текущем положении либо удержанием по положению, реализуемым сервоусилителем, либо электромагнитным тормозом. За счёт нагрузки (например, МРТК стоит на наклонной поверхности) МИПЧ работает в натяг. При переключении на время перехода якоря МИПЧ от статора к шунту или обратно механическая цепь разрывается и усилие прикладывается к пружинному демпферу. В этом случае управление двигателем не изменяется (он остановлен) и сила удара будет пропорциональна нагрузке на МИПЧ и обратно пропорциональна времени перехода якоря из одного состояния в другое. Таким образом, для снижения силы удара необходимо сокращать время переключения, которое находится в обратной зависимости от тока, протекающего в катушке МИПЧ.
Рассмотрим случай переключения МИПЧ при движении МРТК. При переключении в движении система управления должна выполнять два действия: изменять скорость двигателя и переключать МИПЧ. При этом в идеале процессы должны происходить одновременно и за одно и то же время. В реальном случае необходимо учитывать задержку включения магнита, вносимую электромагнитным реле, а также управлять временем изменения скорости (ускорением) двигателя.
Приводной модуль, как правило, работает в скоростном режиме, с ограничением момента. В этом случае заданием является скорость вращения выходного вала, из которой вычисляется требуемая скорость двигателя через передаточное число редуктора. В случае переключения передаточного числа в момент переключения передачи оно меняется мгновенно, и мгновенно меняется задание контуру тока двигателя. При этом возникает токовая перегрузка и ударная нагрузка на вал двигателя. Чтобы минимизировать ударную нагрузку в регуляторе следует изменять передаточное число плавно за время T C . Начинать изменение передаточного числа следует через некоторое время задержки T0 относительно момента прихода команды на изменение передаточного числа. Эта задержка должна учитывать задержку срабатывания реле. Время TC и задержку T0 следует подбирать экспериментально, минимизируя ударные нагрузки на двигатель и на демпфер.
Обсуждение результатов и дальнейшие перспективы исследования
В ходе выполнения работы проанализированы режимы удержания МРТК на уклоне 35° и торможении МРТК от номинальной скорости до остановки на том же уклоне. Определены предельные значения моментов, развиваемых приводными двигателями. Данные ограничения должны быть учтены в системе управления приводными модулями. Составлено математическое описание работы приводных модулей в изложенных выше режимах, а также упругих элементов приводных модулей. Данное математическое описание служит основой построения корректной имитационной модели, необходимой для анализа переходных процессов в приводных модулях при переключении передаточного числа МИПЧ. Описаны структура и функции системы управления приводными модулями.
В результате проведённого исследования сформулированы следующие рекомендации по оснащению МРТК. Для вычисления параметров нагрузки приводных модулей необходимо оснащать МРТК датчиком пространственной ориентации типа инклинометр. Обратная связь по углам наклона МРТК от этого датчика обеспечит определение режима движения МРТК – 70 – и позволит рассчитывать распределение нагрузки между приводными модулями оптимальным способом. Для утилизации энергии торможения МРТК предлагается применять систему сброса энергии на основе чопперных модулей: активное сопротивление и транзисторный ключ, управляемый по сигналу датчика напряжения батарей источника электроэнергии. При повышении напряжения на выводах батарей система управления должна обеспечить управление транзисторным ключом для утилизации тормозной энергии МРТК на активном сопротивлении.
В дальнейшем планируется рассмотреть вопросы синхронизации отдельных приводных модулей в процессе изменения передаточного числа для обеспечения динамических характеристик МРТК.
Список литературы Особенности управления приводными модулями с изменяемым передаточным числом для экстремальных условий применения мобильных робототехнических комплексов
- Козлов О.А., Сущенко Д. О. Перспективы развития наземной робототехники в интересах Росгвардии, Сборник тезисов 33-й Международной научно-технической конференции "ЭКСТРЕМАЛЬНАЯ РОБОТОТЕХНИКА". - Санкт-Петербург: ООО "Типография Фурсова", 2022, 26-28.
- Коротков А.Л., Саитов И. И., Тапеха Н. О., Тимофеев А. Н., Шмаков О. А. Манипуляционные системы мобильных роботов для работы в стесненных пространствах. Труды 33-й Международной научно-технической конференции "ЭКСТРЕМАЛЬНАЯ РОБОТОТЕХНИКА", 29-30 сентября 2022 г. - Санкт-Петербург: Изд-во: ЦНИИ РТК, 2022, 1(1), 11-18.
- Галактионов О.Н., Рего Г. Э., Томских М., Завьялов С. А., Корзун Д. Ж. О конструкции колесного шасси и сенсорной системы для автономного движения по труднопроходимой местности с преодолением и обходом препятствий при выполнении лесохозяйственных работ. Труды 33-й Международной научно-технической конференции "ЭКСТРЕМАЛЬНАЯ РОБОТОТЕХНИКА", 29-30 сентября 2022 г. - Санкт-Петербург: Изд-во: ЦНИИ РТК, 2022, 35-46.
- Luiz F. P. Oliveira, António P. Moreira, Manuel F. Silva. Advances in Forest Robotics: A State-of-theArt Survey. Robotics, 2021, 10(2). ]. DOI: 10.3390/robotics10020053
- Васильев А. В. Принципы построения и классификация шасси мобильных роботов наземного применения и планетоходов. Научно-технические ведомости Санкт-Петербургского государственного политехнического университета. Информатика. Телекоммуникации. Управление. СПб., Санкт-Петербургский политехнический университет Петра Великого, 2013. 124-131.
- Костромин Д.С., Трутс А. А., Лошицкий П. А. Способы повышения локомоционных характеристик шасси мобильных роботов. Журнал Сибирского федерального университета. Техника и технологии, 2023, 16(1), 63-80. EDN: PRWVDF
- Почежерцев А.Г., Васильев А. В., Копылов В. М., Шардыко И. В. Исследование возможных причин неустойчивого поведения колёсного РТК на наклонной поверхности с использованием компьютерной модели. Труды 31-й Международной научно-технической конференции "ЭКСТРЕМАЛЬНАЯ РОБОТОТЕХНИКА", 28-29 сентября 2020 г. - Санкт-Петербург: Изд-во: ЦНИИ РТК, 2020, 1(1), 63-72.
