Параллельная работа инверторов с безынерционным формированием опорных синусоид

Автор: Щукин Владимир Геннадьевич
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Электротехника
Статья в выпуске: 1-2, 2014 года.
Бесплатный доступ
В статье рассматривается параллельная работа инверторов с безынерционным формированием опорных синусоид по общей шине нагрузки; описываются принцип синхронизации, общий алгоритм системы управления инвертора, диаграммы токов и напряжений на элементах схемы и нагрузке, полученные при моделировании.
Инвертор, параллельная работа инверторов, синхронизация, алгоритм, система бесперебойного питания
Короткий адрес: https://sciup.org/14720052
IDR: 14720052 | УДК: 621.3.018.72
Parallel operation of invertors with inertia-free formation of reference sinewaves
Inverters parallel operation with inertia-free forming of reference sinewaves on common load-bus is considered in this article. The research includes description of synchronization principle, general invertor control algorithm, curves of currents and voltages existing on scheme components and power consumers which were read during simulation.
Текст научной статьи Параллельная работа инверторов с безынерционным формированием опорных синусоид
Основные тенденции развития систем бесперебойного питания (СБП) в настоящее время заключаются в увеличении надежности и отказоустойчивости, а также снижении затрат на их разработку и производство. Одним из способов достижения этих целей является организация модульной архитектуры системы. Данная архитектура, с одной стороны, позволяет исключить работу источника бесперебойного питания (ИБП) избыточной мощности на малую нагрузку, организовать любую схему резервирования по любому из принципов обеспечения резерва, с другой – позволяет существенно снизить затраты на разработку и производство ИБП, так как пропадает необходимость разработки устройств широкого диапазона мощностей. При этом необходимая мощность достигается за счет параллельного соединения модулей малой мощности. В модельных рядах зарубежных компаний уже имеются модели ИБП, позволяющие на их базе собирать параллельные СБП (например, модели Powerware 9155, Powerware 9355, BladeUPS компании Eaton, работающие по технологии HotSync) [1; 3]. Независимо от применяемого принципа построения системы, главной проблемой реализации параллельной модульной структуры является синхронизация параллельно работающих инверторов.
Существующие принципы синхронизации основаны на синфазной синхронизации задающих генераторов инверторов. Наиболее простым способом является прямая импульсная синхронизация, при которой каждый модуль получает синхроимпульс от управляю
щего устройства или ведущего модуля, являясь при этом ведомым модулем. К минусам данного принципа можно отнести наличие шины синхронизации между модулями и наличие ведущего, или управляющего, модуля, так как каждый из этих элементов может являться единой точкой отказа для всей системы.
Следующим методом синхронизации является фазовая автоподстройка частоты (ФАПЧ). При использовании данного принципа возможно обойтись без наличия общей шины синхронизации. Данный метод часто применяется в одномодульных ИБП с двойным прео- бразованием для синхронизации с входной сетью. Недостатками данного метода являются сравнительно большое время, необходимое для выравнивания фаз модулей, а также постоянное изменение частоты каждого модуля, обусловленное самим принципом синхронизации за счет отрицательной обратной связи. Негативным эффектом от описанных недостатков является возникновение встречных токов инверторов.
Нами предложен новый принцип синхронизации инверторов, основанный на безынерционной жесткой взаимной синхронизации (рис. 1).
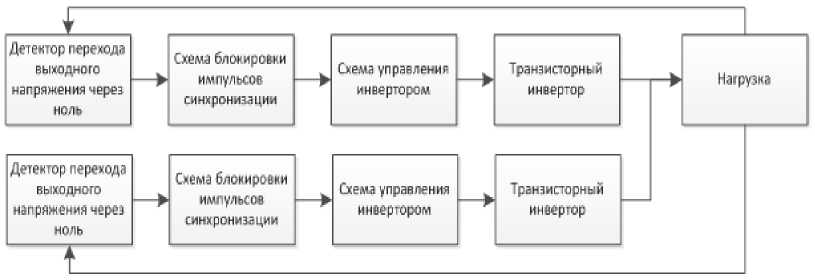
Рис . 1. Функциональная схема системы из двух модулей инверторов, соединенных параллельно
ВЕСТНИК Мордовского университета | 2014 | № 1-2
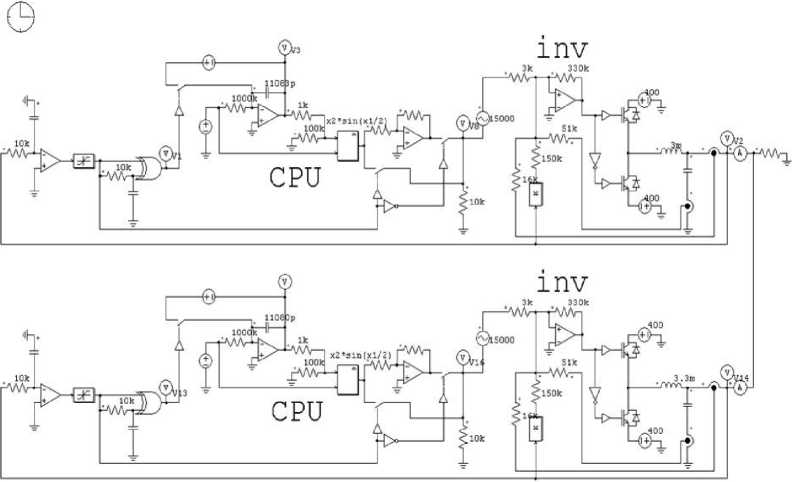
При данном принципе синхронизации отсутствуют выделенная шина синхронизации и разделение на ведущий и ведомый модули. Синхронизация осуществляется от общей шины нагрузки. Этот способ имеет сходство с прямой импульсной синхронизацией, но в качестве синхроимпульса каждым модулем детектируется переход напряжения на нагрузке через ноль. Момент смены полярности выходного напряжения является также стартовым синхроимпульсом одновременно для всех инверторов. При этом каждые 1/2 периода происходят перезапуск задающего генератора инвертора и корректировка частоты каждого модуля. При этом нет необходимости в назначении ведущих и ведомых модулей, так как при этом каждый модуль одновременно является и ведущим, и ведомым. Опережающий модуль автоматически является ведущим для остальных, так как переход его выходного напряжения через ноль первым формирует общий синхросигнал. При этом возможный «разбег фаз» выходных напряжений модулей обнуляется каждые 10 мс, чем обеспечивается минимальная инерционность синхронизации. Для анализа данного принципа синхронизации проведем моделирование системы, состоящей из двух инверторов, включенных параллельно (рис. 2) [2].
Для понимания особенностей принципа синхронизации рассмотрим упрощенный алгоритм взаимной синхронизации. Алгоритм можно разделить на 3 процедуры: поиск синхросигнала, синхронизация и формирование опорного синуса (рис. 4–6).
Серия «Естественные и технические науки»
Р и с . 2. Модель параллельной работы двух инверторов с безынерционным формированием опорных синусоид
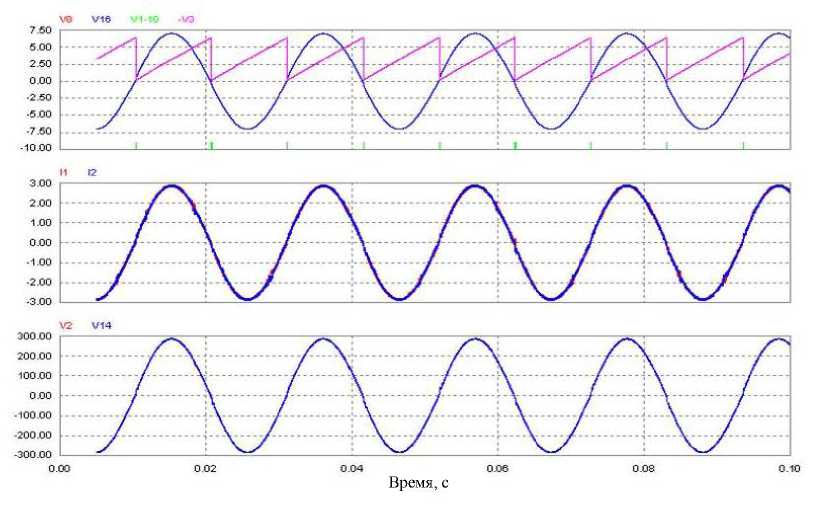
Р и с . 3. Осциллограммы токов и напряжений, полученных при моделировании
ВЕСТНИК Мордовского университета | 2014 | № 1-2
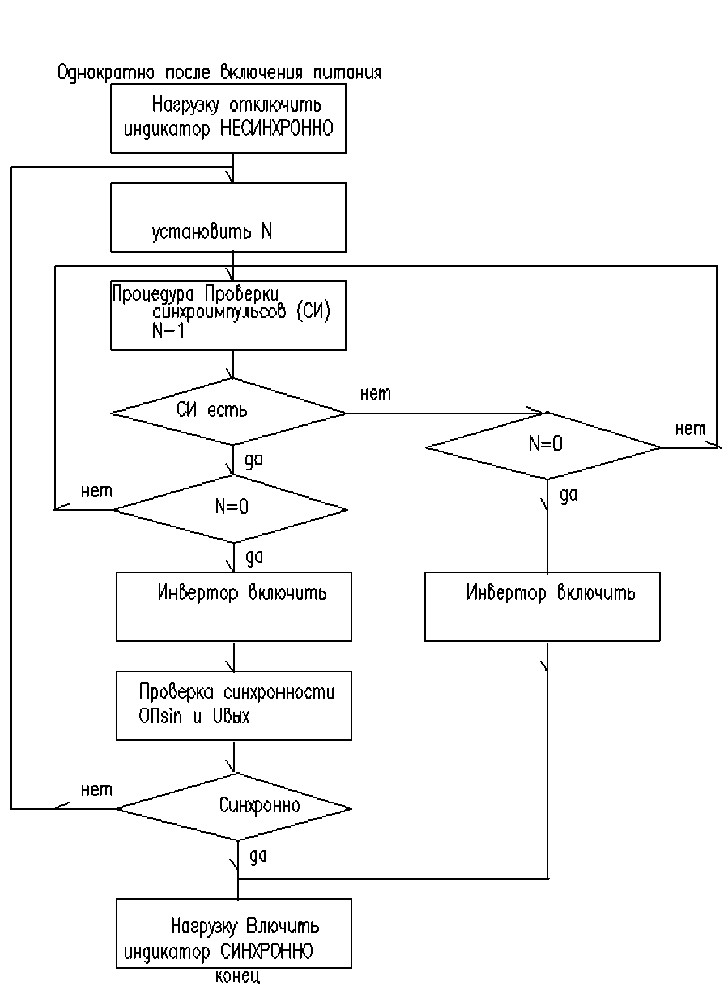
Р и с . 4. Процедура поиска синхросигнала
Поиск синхросигнала выполняется однократно, при включении питания. С помощью данной операции определяется, работают ли другие модули, под- ключенные параллельно, чтобы стартовать синхронно с ними, или же производится запуск при отсутствии напряжения на общей шине нагрузки.
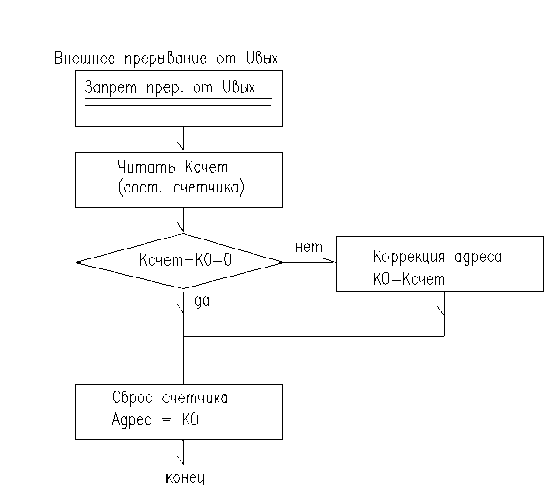
Р и с . 5. Процедура синхронизации
Серия «Естественные и технические науки»
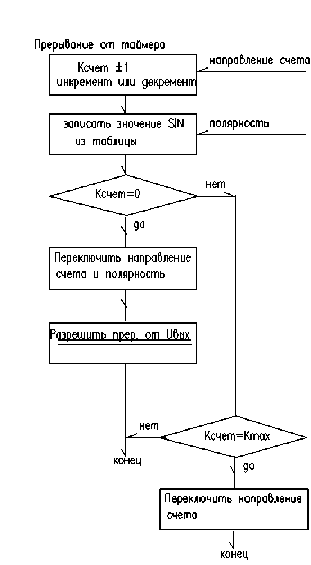
Р и с . 6. Процедура формирования опорного синуса
Для исключения влияния помех применяется временная задержка детектирования синхроимпульсов от датчика перехода напряжения через ноль, в качестве которого применяется компаратор. Сразу после получения синхроимпульса блокируется прием последующих импульсов на время, немного меньшее длительности одного полупериода выходного сигнала. Ширина выделенных «временных ворот» в конце полупериода выходного напряжения выбирается из условия максимально возможного разбега фаз за текущий период синхронизации и максимально допустимого фазового скачка напряжения при воздействии возможной помехи. После этого система управления модуля ожидает перехода напряжения нагрузки через ноль, замеряя время расхождения между выходными сигналами модулей. После возникновения синхроимпульса производятся пересчет и корректировка выходной частоты каждого модуля, кроме являющегося на данный момент ведущим, формирование опорного синуса для инвертора и блокировки приема синхроимпульсов. В результате получается система, состоящая из параллельно работающих инверторов, в которой единственной связью между модулями является общая шина нагрузки, при этом в этой системе отсутствуют единые точки отказа, так как она не имеет единых управляющих устройств и шины синхронизации.
Список литературы Параллельная работа инверторов с безынерционным формированием опорных синусоид
- Жилкина, Н. Резервы для защиты ответственных приложений/Н. Жилкина//Журнал сетевых решений/LAN. -2002. -№ 10.
- URL: http://powersimtech.com (дата обращения 02.10.2013).
- URL: http://powerquality.eaton.ru/Russia/Technology-Applications/Technology-Leadership/RU-upsparalleling.asp (дата обращения 02.10.2013).
